基于AdaBoost算法的重型車輛側(cè)翻預(yù)警研究
2021-08-27 00:33:54朱天軍王振峰尹曉軒
重慶交通大學(xué)學(xué)報(自然科學(xué)版) 2021年8期
朱天軍,麻 威,王振峰,尹曉軒
(1. 河北工程大學(xué) 機械與裝備工程學(xué)院,河北 邯鄲 056038;2. 中國汽車技術(shù)研究中心有限公司 汽車工程研究院,天津 300300;3. 中汽研(天津)汽車工程研究院有限公司,天津 300300)
0 引 言
車輛發(fā)生翻車是一種嚴重的安全事故。據(jù)有關(guān)部門的不完全統(tǒng)計,2013—2016年,中國和美國兩國近5年來發(fā)生的車輛側(cè)翻事故和造成的死亡人數(shù)均呈現(xiàn)逐年上升的趨勢[1]。重型車輛具有質(zhì)心高、整車重量和體積大等特點,因此車輪間距就顯得較小,所以重型車輛在彎道和遇到障礙物時極易發(fā)生側(cè)翻危險。側(cè)翻極限工況一旦發(fā)生,將給人民群眾帶來巨大的生命和財產(chǎn)安全。因此,重型車輛側(cè)翻及其預(yù)防措施的研究顯得極其重要。
針對側(cè)翻,國內(nèi)外學(xué)者進行了深入的研究。李海青等[2]基于模糊差動制動的綜合控制系統(tǒng),建立了相應(yīng)的擬合毛刷輪胎模型,仿真結(jié)果表明,該綜合控制系統(tǒng)在防側(cè)翻的同時還提高了汽車的橫擺穩(wěn)定性;T. V. VU等[3]研究重型車輛主動抗側(cè)傾桿系統(tǒng)的線性變參數(shù)控制器,通過對兩種不同類型的重型車輛進行仿真,結(jié)果表明,該策略顯著提高了車輛的橫搖穩(wěn)定性;何鋒等[4]建立了整車9自由度側(cè)傾模型和四輪路面激勵模型,針對解耦算法中反饋控制器二階系數(shù)選取的復(fù)雜性,運用遺傳算法對目標函數(shù)進行全局尋優(yōu),仿真結(jié)果表明,車輛的穩(wěn)定性得到有效的控制;肖佩等[5]建立了基于遞推二乘法的路面附著系數(shù)在線辨識模型,分析了路面附著系數(shù)對車輛差動制動性能的影響,修正了差動制動控制策略,提出了考慮路面附著系數(shù)的車輛差動制動控制策略,仿真結(jié)果表明,車輛的主動安全性能得到提升;陳麗靜[6]通過建立最優(yōu)加權(quán)系數(shù)的LQG控制器的汽車主動懸架模型,驗證汽車在一般轉(zhuǎn)彎和緊急突發(fā)急轉(zhuǎn)彎情況下,主動懸架對汽車側(cè)翻的影響,研究結(jié)果表明,汽車的側(cè)翻穩(wěn)定性得到改善;陳松等[7]為實現(xiàn)車輛側(cè)傾的主動控制,設(shè)計了一種基于諧波齒輪的電機控制式的AARB裝置,建立了該AARB裝置的側(cè)傾角剛度數(shù)學(xué)模型,通過硬件在環(huán)試驗得出,該方法有效地控制了車輛的側(cè)傾;金智林等[8-9]提出基于二次預(yù)測型橫向載荷轉(zhuǎn)移率的汽車側(cè)翻預(yù)警方法,同時又推導(dǎo)出一種新的車輛側(cè)翻指數(shù),用于預(yù)測三軸客車的車輛側(cè)翻風險,研究結(jié)果表明,汽車側(cè)翻的預(yù)警精度得到提高,汽車防側(cè)翻的主動安全性能得到改善;韓雪雯等[10]基于差動制動原理設(shè)計的模糊滑模控制器,建立了車輛三自由度模型和被控車輛模型,聯(lián)合仿真表明,車輛在極限工況下具有良好的操縱穩(wěn)定性;趙又群等[11]根據(jù)預(yù)瞄跟隨理論和灰色預(yù)測理論,建立預(yù)瞄預(yù)測駕駛員模型,推算出側(cè)翻估計指標,仿真結(jié)果說明了側(cè)翻預(yù)測系統(tǒng)的有效性;朱天軍等[12]結(jié)合經(jīng)典 Kalman狀態(tài)地估計技術(shù)實時準確地估計重型車輛的狀態(tài),并研究基于改進側(cè)翻預(yù)警時間 (time to rollover, TTR)重型車輛側(cè)翻預(yù)警算法。
現(xiàn)階段大部分側(cè)翻預(yù)警研究的重點均為TTR算法、主動控制或差動控制,均為被動性的措施。目前缺少一種具有主動性、實時性以及應(yīng)用范圍更廣闊的側(cè)翻預(yù)警輔助,來預(yù)防側(cè)翻帶來的危害。應(yīng)用AdaBoost算法,在重型車輛側(cè)翻預(yù)測中可以利用現(xiàn)實中更新的以往數(shù)據(jù)進行分類器的訓(xùn)練,訓(xùn)練好分類器之后可以采集實時的數(shù)據(jù)進行分類預(yù)測,從而實現(xiàn)對車輛側(cè)翻進行實時預(yù)測。其結(jié)果可為車輛駕駛員提供技術(shù)支撐,提前預(yù)測風險的到來,以便更好的應(yīng)對側(cè)翻風險,保障車輛的正常行駛,減少了危險側(cè)翻事故的發(fā)生。
1 重型車輛側(cè)翻影響因素
重型車輛側(cè)翻是一個極度危險的工況。發(fā)生側(cè)翻的影響因素歸納起來可以分為兩類:一類是汽車設(shè)計參數(shù)的靜態(tài)部分,比如汽車質(zhì)心高度、懸架、車速、輪胎等;另一類是汽車行駛動態(tài)部分,比如汽車側(cè)向加速度、橫擺角、道路幾何形狀、駕駛員操作等[13]。
在分析以往側(cè)翻事故中,橫向載荷轉(zhuǎn)移率(lateral-load transfer rate,LTR )、橫擺角速度、側(cè)傾角、側(cè)向加速度、質(zhì)心側(cè)偏角最能夠最能反映車輛的側(cè)翻穩(wěn)定性[14]。考慮到重型車輛的質(zhì)心到側(cè)傾中心的高度h與輪距T的比值較大,重型車輛極易發(fā)生側(cè)翻事故,因此要對輪胎地面載荷進行監(jiān)測。車輛穩(wěn)定的指標可以由橫向載荷轉(zhuǎn)移率來反應(yīng),如式(1):
(1)
式中:Fr,i為右邊第i個輪胎垂直載荷;Fl,i為左邊第i個輪胎垂直載荷;LTR的值域為[-1,+1],當LTR為±1時,判定車輛已經(jīng)有一側(cè)輪胎離地。
2 重型車輛仿真模型
利用TruckSim?動力學(xué)軟件選擇車型。根據(jù)實際車型主要數(shù)據(jù)進行車輛模型的搭建。模型搭建大體上分為4部分:車輛簧載質(zhì)量模型搭建、輪胎模型搭建、懸架系統(tǒng)搭建和轉(zhuǎn)向系統(tǒng)搭建。模型搭建好后,隨即進行預(yù)警模型的建立。表1是重型車輛仿真模型主要參數(shù)。
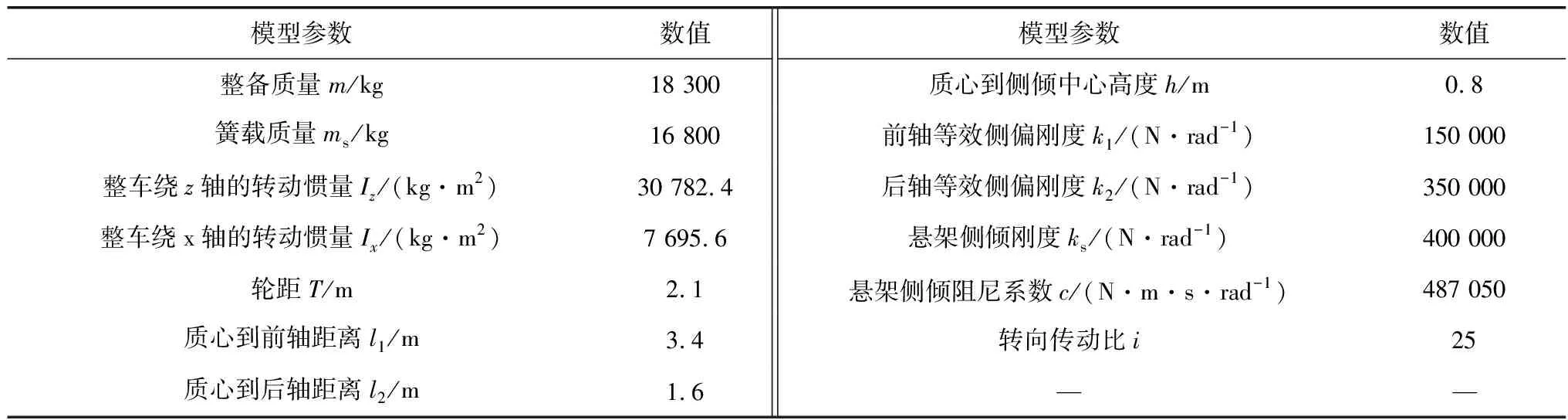
表1 重型車輛仿真模型主要參數(shù)Table 1 Main parameters of heavy vehicle simulation model
3 重型車輛側(cè)翻預(yù)警模型
3.1 側(cè)翻預(yù)警原理
重型車輛側(cè)翻預(yù)警的物理模型不夠精準,在缺乏理論模型數(shù)據(jù)的情況下,統(tǒng)計學(xué)習理論是最基本的分析手段[15]。機器學(xué)習基于以往的觀察來獲取較為準確的預(yù)測,其提供一種從觀測數(shù)據(jù)出發(fā)得到目前尚不能通過原理分析得到的規(guī)律,進而利用此規(guī)律預(yù)測未來數(shù)據(jù)的方法,其核心是把樣例分類到各種可能的離散值對應(yīng)的類別中,并對未知樣本做出盡可能精準的預(yù)測[16]。
重型車輛的預(yù)警問題歸結(jié)為有監(jiān)督學(xué)習的分類預(yù)測問題,以得到的側(cè)翻統(tǒng)計數(shù)據(jù)構(gòu)成訓(xùn)練樣本,以AdaBoost集成學(xué)習算法形成分類學(xué)習器,并根據(jù)收集的各種參數(shù)數(shù)據(jù)進行側(cè)翻預(yù)警[17]。
3.2 AdaBoost算法對側(cè)翻情況的分類
AdaBoost學(xué)習算法的原理是提高錯分類樣本的權(quán)值降低正確分類樣本的權(quán)值,構(gòu)建多個弱分類器通過加權(quán)投票的方式構(gòu)建最終的強分類器。AdaBoost算法應(yīng)用在側(cè)翻情況的分類中,主要應(yīng)用分類器區(qū)分側(cè)翻與非側(cè)翻兩種工作狀態(tài),側(cè)翻時用“-1”表示,非側(cè)翻時用“+1”表示。同時應(yīng)用已有的數(shù)據(jù)作為訓(xùn)練樣本集進行多個弱分類器的訓(xùn)練,使用單層決策樹構(gòu)建弱分類器進行訓(xùn)練分類。單層決策樹(decision stump,也叫決策樹樁)是決策樹中較為簡單的一種。單個單層決策樹,只能對一個特征來做出決策。圖1為單層決策樹分裂過程。如圖1,這棵樹只有一次分裂進程,因而它實際上是一個樹樁。圖2為AdaBoost學(xué)習算法實現(xiàn)流程。

圖1 單層決策樹分裂過程Fig. 1 Splitting process of single decision tree
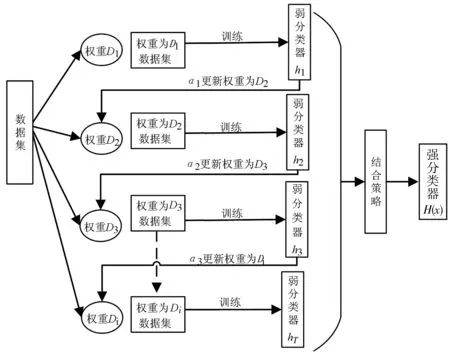
圖2 AdaBoost學(xué)習算法實現(xiàn)流程Fig. 2 Realization process of AdaBoost learning algorithm
如圖2,AdaBoost學(xué)習算法實現(xiàn)流程如下:
1)設(shè)定訓(xùn)練樣本以及分類(x1,y1),…,(xn,yn),其中xi∈X,yi∈Y,Y的范圍為{-1,+1}。初始化樣本權(quán)重,設(shè)定D1(i)=1/n,最大循環(huán)次數(shù)為T的迭代練習。
2)對于第t=1,…,T次迭代,使用樣本的權(quán)值分布Dt訓(xùn)練弱分類器。
3)得到弱分類假設(shè)ht:X→{-1,+1},計算弱分類器的錯誤率,如式(2):
εt=Pr~Dt[ht(xi)≠yi]
(2)
4)選取αt如式(3):
αt=1/2ln[(1-εt)/εt]
(3)
5)更新第t+1次迭代中的權(quán)值分布:
(4)
則:
(5)
式中:Zt是歸一化參數(shù)。
6)在經(jīng)由T次迭代以后,得到h1,h2,…,hT共T個弱分類器。
7)最后通過加權(quán)投票,得到強分類器:
(6)
式中:sign(·)表示符號運算。
分類器經(jīng)過訓(xùn)練之后,需要對實時得到的數(shù)據(jù)進行分類處理。當被認定屬于側(cè)翻狀態(tài)時,就需要提前對重型車輛進行控制,避免側(cè)翻事故的發(fā)生。
3.3 基于AdaBoost算法的重型車輛側(cè)翻預(yù)警系統(tǒng)
基于AdaBoost算法的重型車輛側(cè)翻預(yù)警系統(tǒng)如圖3。其概況如下:首先收集重型車輛中行駛過程中的原始數(shù)據(jù)集與LTR生成的數(shù)據(jù)類別標簽,如圖4,處理數(shù)據(jù)備用。圖4中:Ff,r為右前輪垂直載荷;Fb,r為右后輪垂直載荷;Ff,l為左前輪垂直載荷;Fb,l為左后輪垂直載荷。然后建立一個單層決策樹弱學(xué)習器。接著在算法中使用多個弱分類器進行特征列循環(huán),對比所有列中最優(yōu)分界值的最小誤差值。隨后將列進行分段,求解出所有段中最小誤差分界值,并記錄數(shù)據(jù)其中最小錯誤率。
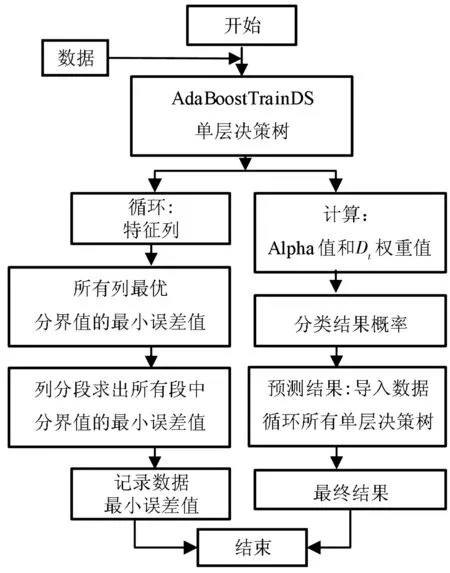
圖3 基于AdaBoost算法的重型車輛側(cè)翻預(yù)警系統(tǒng)Fig. 3 Heavy vehicle rollover warning system in AdaBoost algorithm
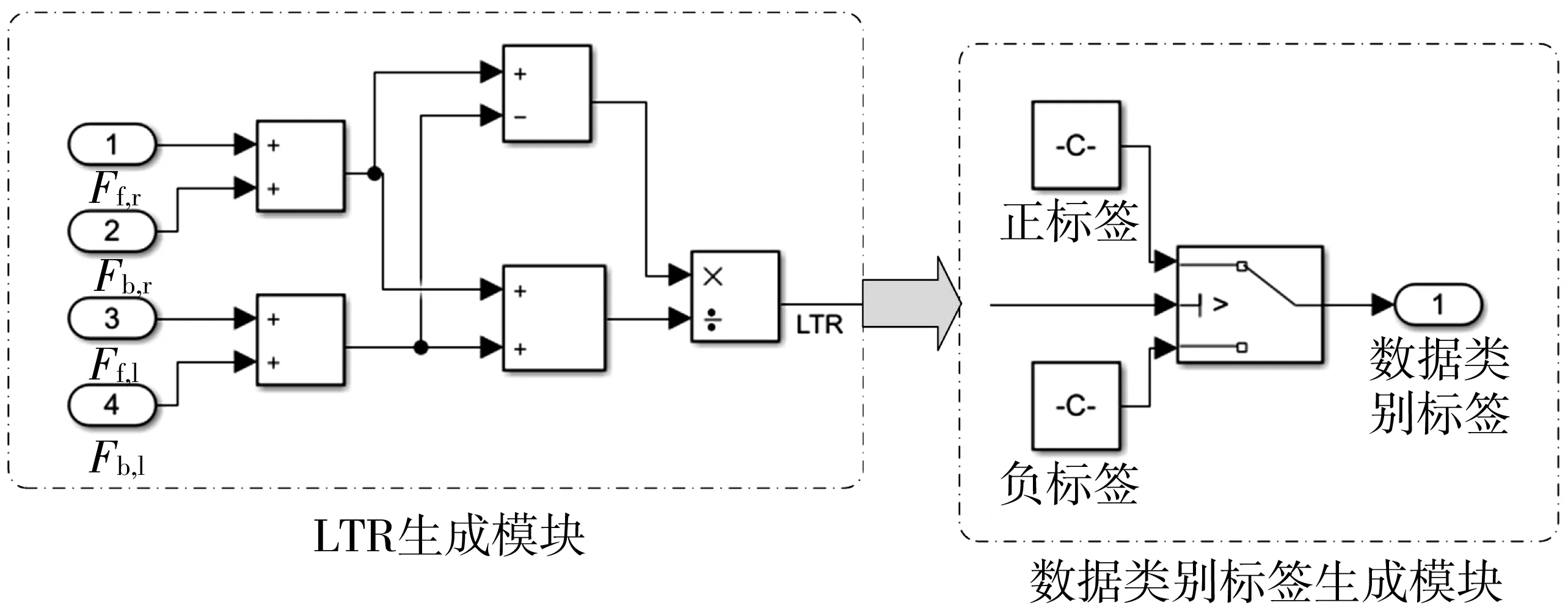
圖4 橫向載荷轉(zhuǎn)移率(LTR)模塊與數(shù)據(jù)類別標簽生成模塊Fig. 4 Lateral-load transfer rate (LTR) module and data categorylabel generation module
同時根據(jù)式(2)與式(3),計算對應(yīng)Alpha值αt和權(quán)重值Dt,求出分類結(jié)果的概率。分類結(jié)果概率包含最優(yōu)單層決策樹分類結(jié)果數(shù)據(jù)集和存放在最優(yōu)單層決策樹中的所有信息。最后進行預(yù)測,導(dǎo)入實時數(shù)據(jù),經(jīng)由單層決策樹分類器得出分類結(jié)果,并計算出分類結(jié)果概率。循環(huán)全部單層決策樹,并進行累加,得到最終結(jié)果。將結(jié)果提供給駕駛員作為技術(shù)支持,減少側(cè)翻危險事故的發(fā)生。
4 算法仿真驗證
筆者聯(lián)合MATLAB & Simulink與TruckSim?動力學(xué)軟件進行重型車輛仿真,如圖5。
圖5中,輸入系統(tǒng)中的數(shù)據(jù)導(dǎo)入車輛模型中,進行聯(lián)合仿真;經(jīng)仿真生成原始數(shù)據(jù)和數(shù)據(jù)標簽,將兩者數(shù)據(jù)進行處理并記錄;魚鉤工況和雙移線工況生成的數(shù)據(jù)導(dǎo)入預(yù)警算法中進行訓(xùn)練,在得到強分類器之后將復(fù)雜工況生成的數(shù)據(jù)導(dǎo)入預(yù)警算法中進行預(yù)測,最后得到有效預(yù)測側(cè)翻的結(jié)果。
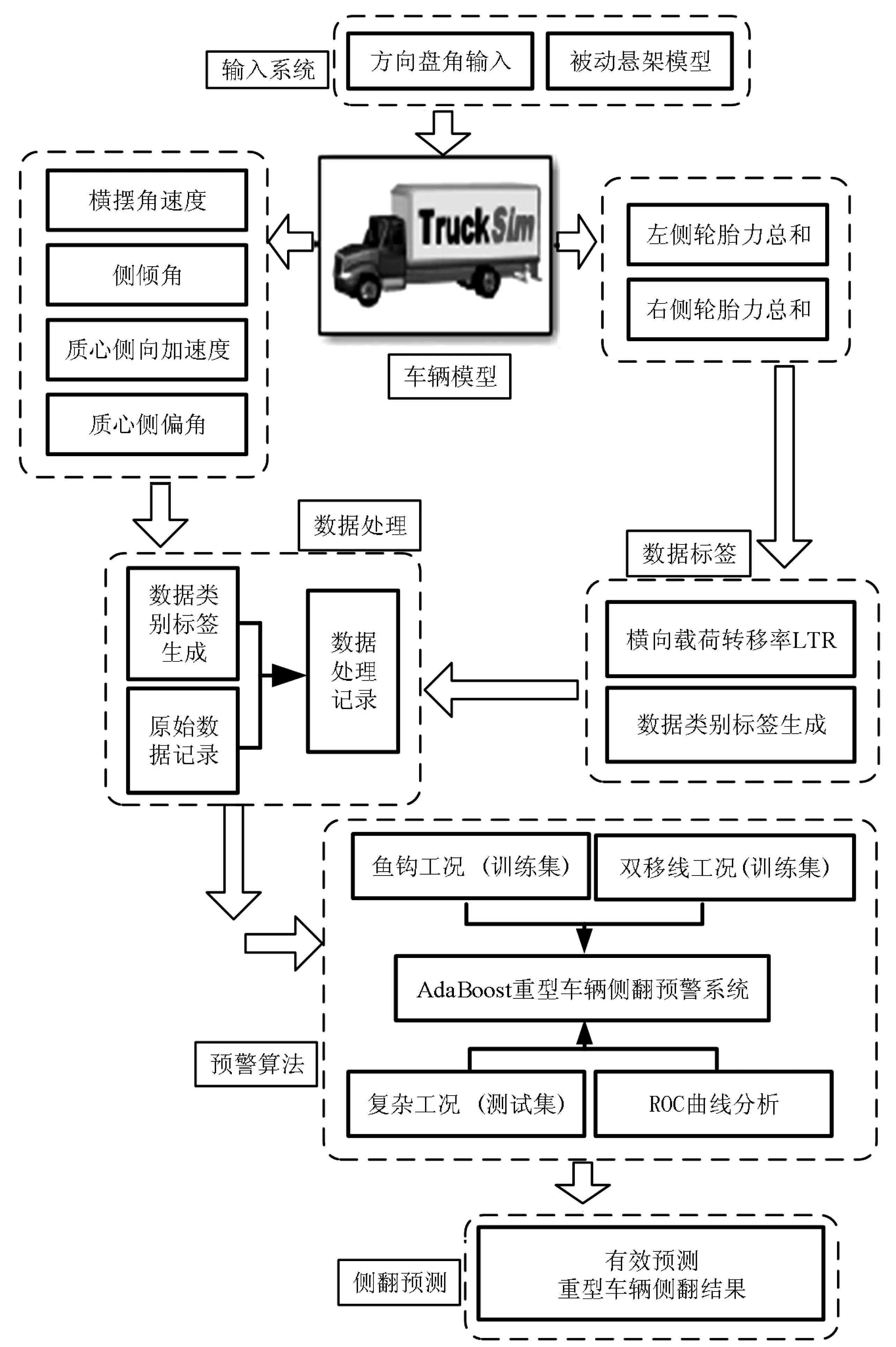
圖5 重型車輛聯(lián)合仿真示意Fig. 5 Schematic diagram of heavy vehicle joint simulation
4.1 數(shù)據(jù)的建立
應(yīng)用MATLAB & Simulink與TruckSim?動力學(xué)軟件進行數(shù)據(jù)獲取,選用車輛側(cè)翻較多的工況如魚鉤轉(zhuǎn)向工況和雙移線工況為以往數(shù)據(jù)作為訓(xùn)練集,選用特殊復(fù)雜工況為實時數(shù)據(jù)作為測試集,以時間間隔為0.01 s記錄一次數(shù)據(jù)。數(shù)據(jù)記錄包含工況下的時間、橫擺角速度、側(cè)傾角、質(zhì)心側(cè)向加速度、質(zhì)心側(cè)偏角等數(shù)據(jù),對數(shù)據(jù)進行預(yù)處理,得到訓(xùn)練集樣本1 610 組(側(cè)翻數(shù)據(jù)為410組,非側(cè)翻數(shù)據(jù)為1 200組),測試集樣本1 010組(側(cè)翻數(shù)據(jù)為300組,非側(cè)翻數(shù)據(jù)為710組)。
4.1.1 魚鉤工況
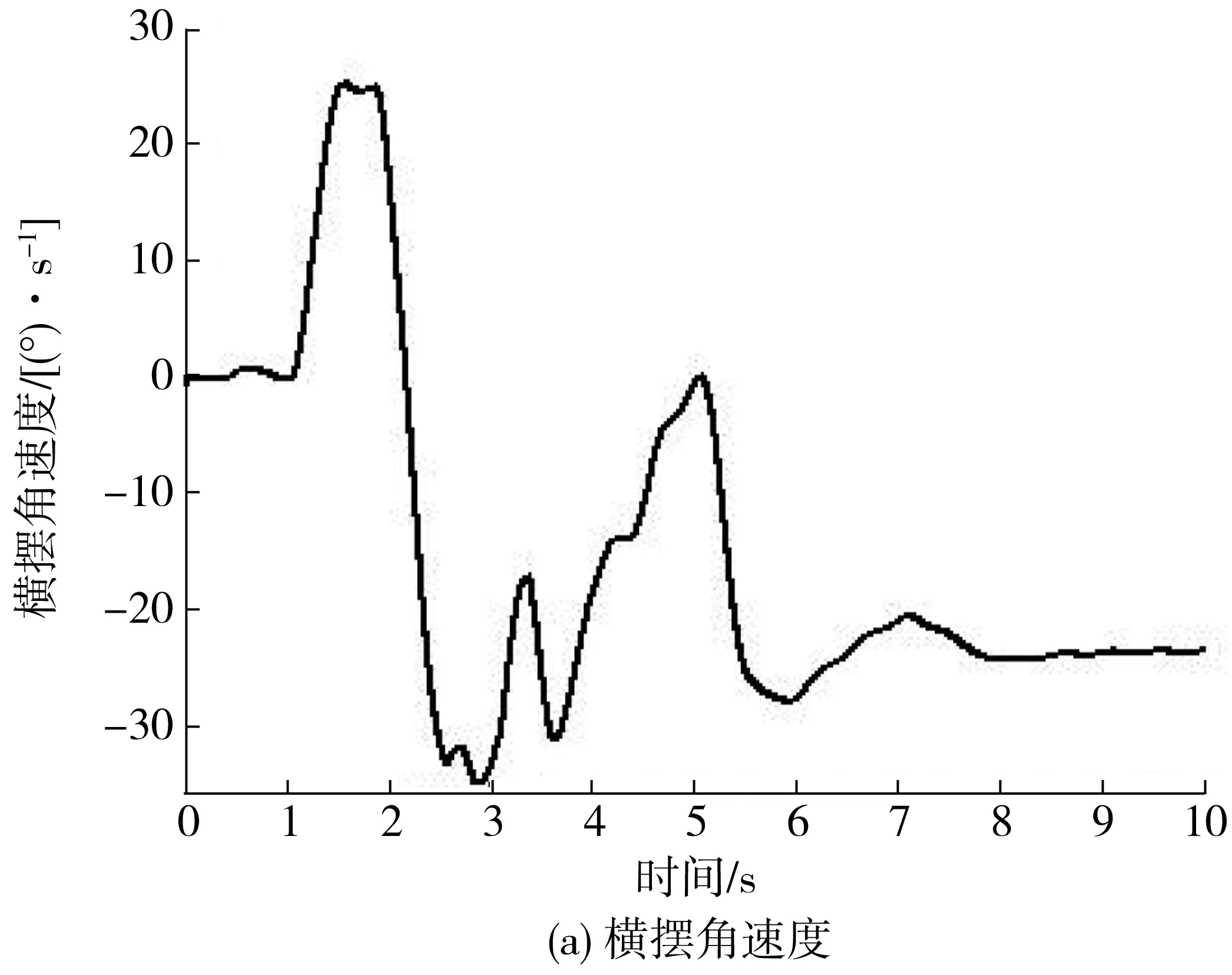
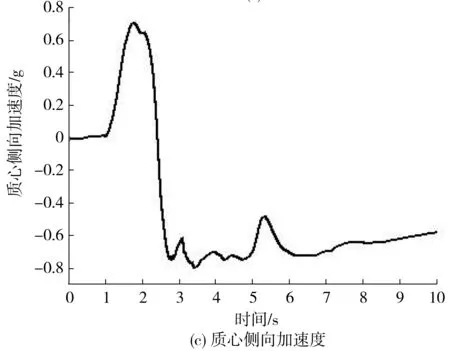
魚鉤工況下,方向盤轉(zhuǎn)角輸入設(shè)置如圖6,道路附著系數(shù)設(shè)定為0.85,初始車速為85 km/h,橫向載荷轉(zhuǎn)移率LTR為 ±0.85 作為側(cè)翻界限,標定數(shù)據(jù)標簽并處理數(shù)據(jù),作為訓(xùn)練集(Train)保存。圖7為魚鉤工況下各參數(shù)的變化,其中圖7(a)~(d)分別對應(yīng)魚鉤工況下的橫擺角速度、側(cè)傾角、質(zhì)心側(cè)向加速度、質(zhì)心側(cè)偏角變化情況。
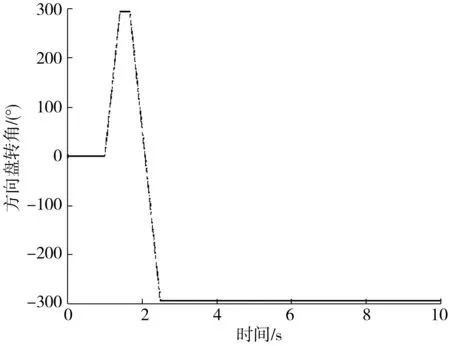
圖6 方向盤轉(zhuǎn)角輸入(魚鉤工況)Fig. 6 Steering wheel angle input (fishhook work condition)
4.1.2 雙移線工況
雙移線工況下,路徑的設(shè)置如圖8,道路附著系數(shù)設(shè)定為0.85,初始車速為120 km/h,橫向載荷轉(zhuǎn)移率LTR為 ±0.85 作為側(cè)翻界限,標定數(shù)據(jù)標簽并處理數(shù)據(jù),作為訓(xùn)練集(Train)保存。圖9為雙移線工況下各參數(shù)變化,其中圖9(a)~(d)分別對應(yīng)雙移線工況下橫擺角速度、側(cè)傾角、質(zhì)心側(cè)向加速度、質(zhì)心側(cè)偏角的變化情況。
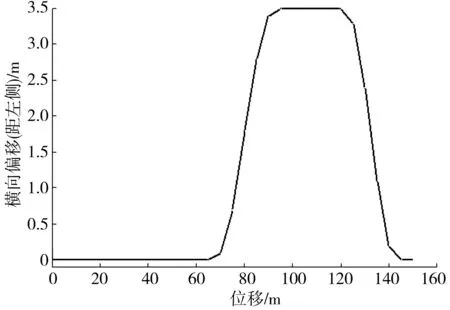
圖8 雙移線工況下路徑Fig. 8 Path diagram under the working condition of DLC
4.1.3 復(fù)雜工況
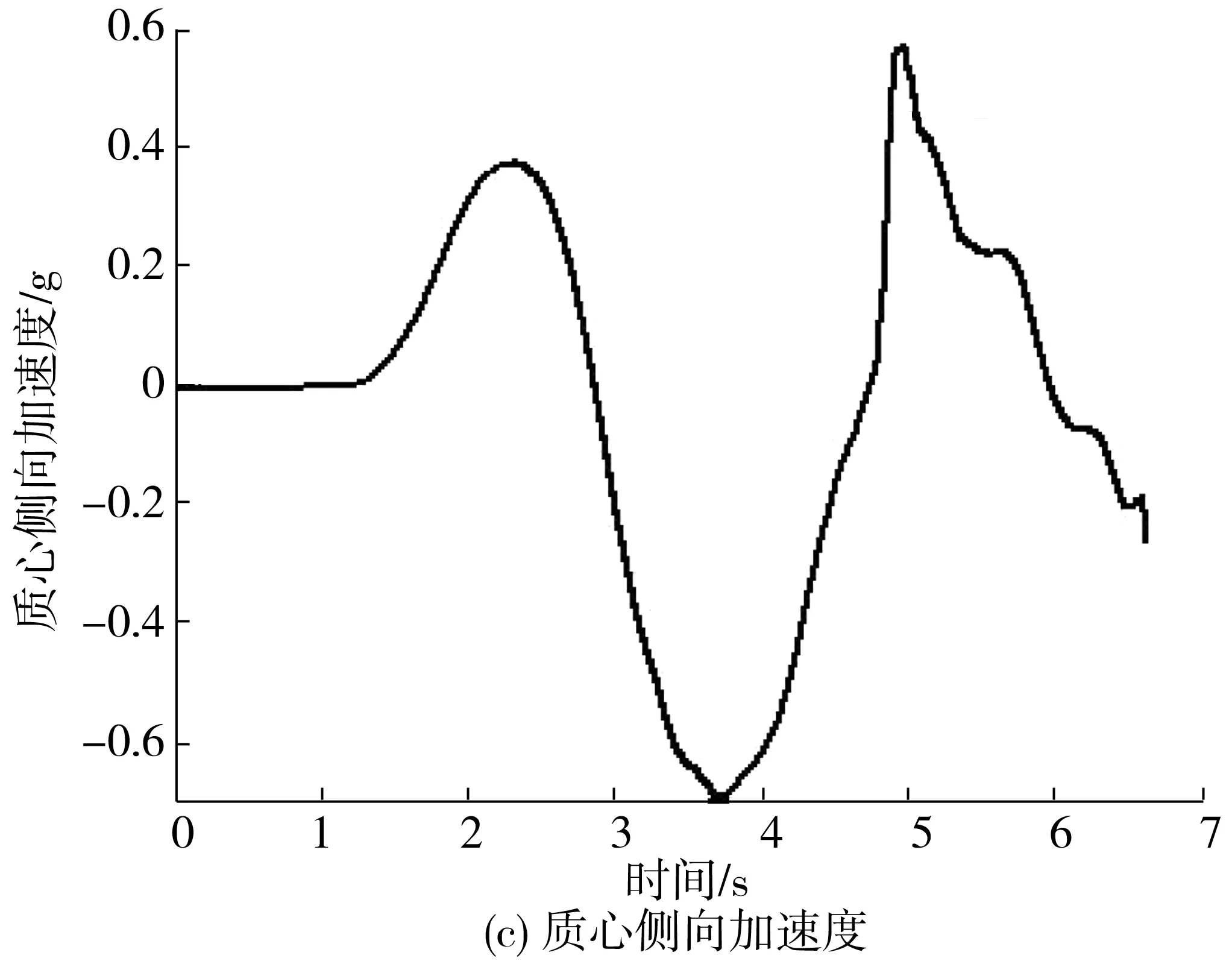
復(fù)雜工況下,路徑圖的設(shè)置如圖10,道路附著系數(shù)設(shè)為0.85,初始車速為120 km/h,橫向載荷轉(zhuǎn)移率LTR為 ±0.85作為側(cè)翻界限,標定數(shù)據(jù)標簽并處理數(shù)據(jù),作為測試集(Test)保存。圖11為復(fù)雜工況下各參數(shù)變化情況,其中圖11(a)~(d)分別對應(yīng)復(fù)雜工況下橫擺角速度、側(cè)傾角、質(zhì)心側(cè)向加速度、質(zhì)心側(cè)偏角的變化情況。圖12為復(fù)雜工況下橫向載荷轉(zhuǎn)移率的變化情況。
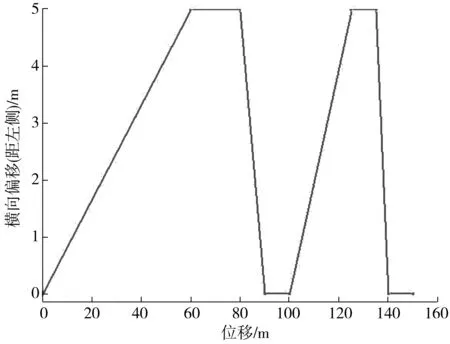
圖10 復(fù)雜工況下路徑Fig. 10 Path diagram under complex working conditions
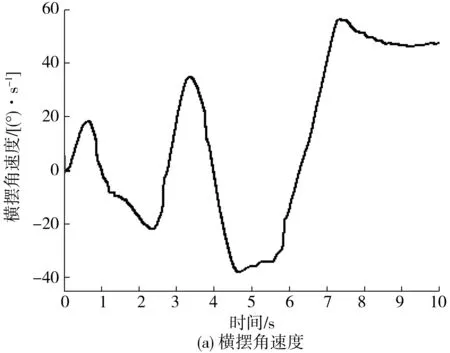
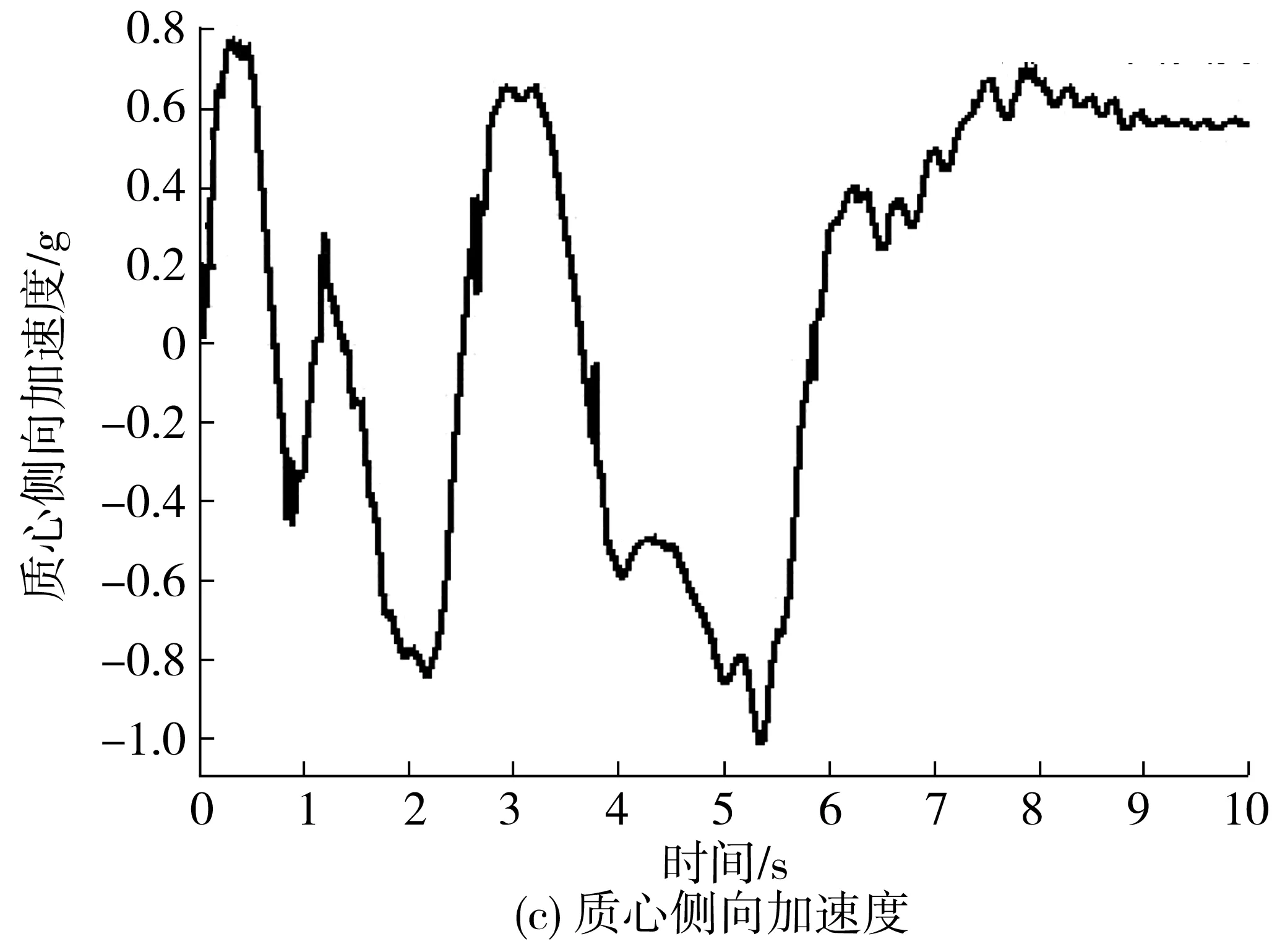
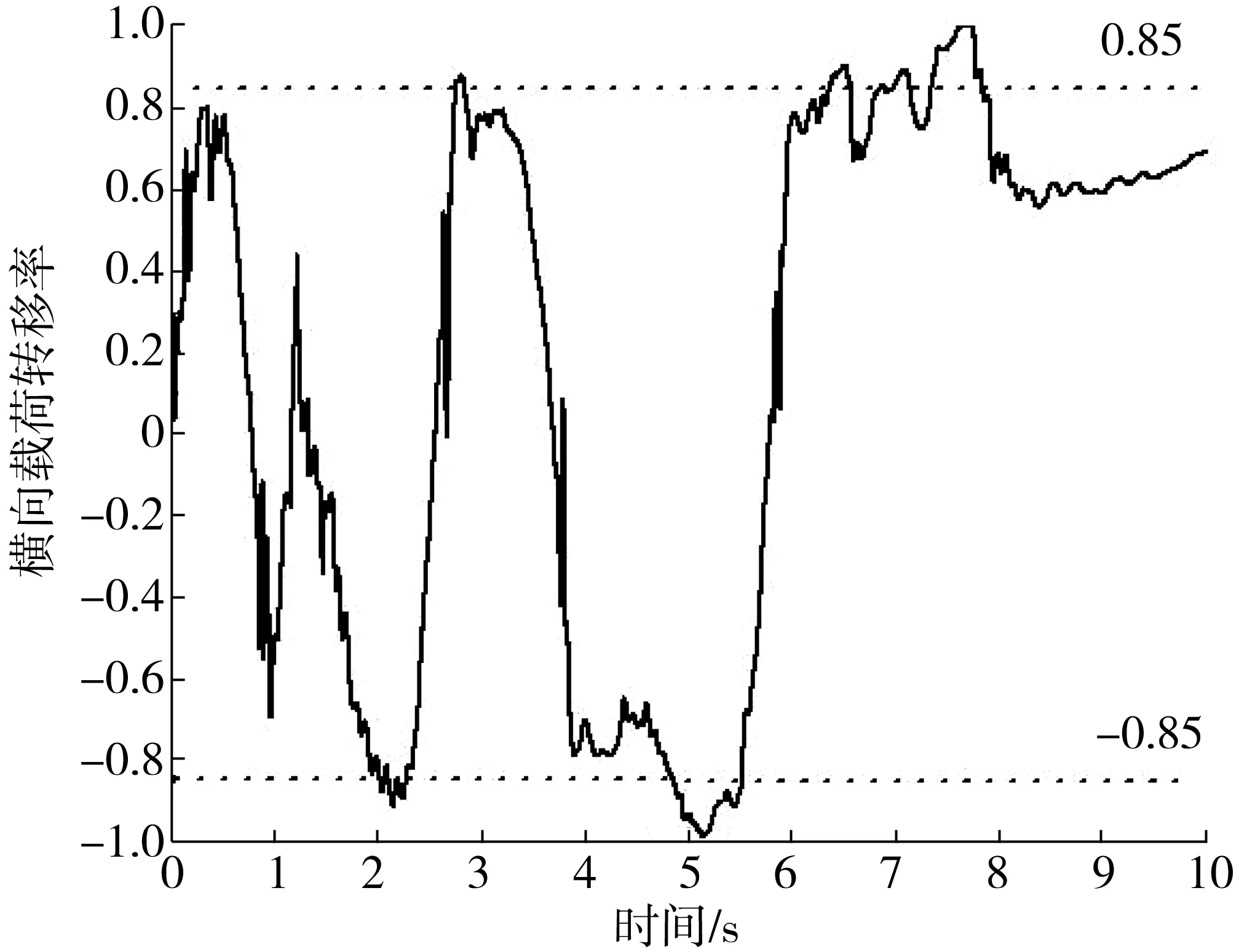
圖12 復(fù)雜工況下LTR變化Fig. 12 LTR change under complex working conditions
4.2 分類性能度量指標
在機器學(xué)習中,利用混淆矩陣(confusion matrix)的工具來了解分類中的錯誤。二類問題中,如果將一個正例判為正例,那么就可以認為產(chǎn)生一個真正例(true positive,TP,也稱真陽);如果對一個反例正確地判為反例,則認為產(chǎn)生了一個真反例(true negatice,TN,也稱真陰)。相應(yīng)的兩種情況分別稱為偽反例(false negative,FN,也稱假陰)和偽正例(false positive,FP,也稱假陽)[18]。筆者利用接受者操作特性曲線(receiver operating characteristic curve,ROC) 來權(quán)衡模型預(yù)判的準確率。
4.3 仿真結(jié)果
為驗證重型車輛側(cè)翻預(yù)警系統(tǒng)的有效性,將數(shù)據(jù)導(dǎo)入AdaBooost算法中,并構(gòu)建分類函數(shù)進行預(yù)測車輛側(cè)翻分類情況,結(jié)果如圖13。選取的弱分類器個數(shù)為40個,測試集和訓(xùn)練集的準確率均達到80%以上。為更好驗證不同分類器數(shù)目情況下AdaBoost算法的預(yù)測準確性,選取1~10 000個弱分類器進行預(yù)測,得到結(jié)果如表2。

表2 不同弱分類器數(shù)目的AdaBoost算法的預(yù)測正確率Table 2 Prediction accuracy of AdaBoost algorithm withdifferent numbers of weak classifiers
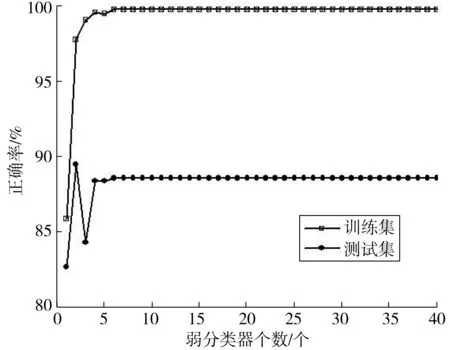
圖13 重型車輛側(cè)翻預(yù)警分類效果Fig. 13 Effect of warning classification of heavy vehicle rollover
為了證明AdaBoost算法在預(yù)測重型車輛側(cè)翻過程中有更好的預(yù)測精度,筆者另外選取Logistic回歸算法進行重型車輛側(cè)翻預(yù)警對比。選取同樣的數(shù)據(jù),在Logistic回歸算法進行預(yù)測分類,得到訓(xùn)練集正確率為73.3%,測試集正確率為63.7%。結(jié)果表明,相比Logistic回歸算法,筆者設(shè)計的AdaBoost算法在預(yù)測重型車輛側(cè)翻中具有更高的預(yù)判精度,結(jié)果如表3。
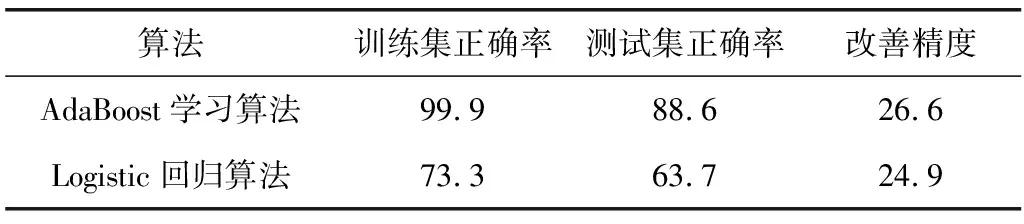
表3 AdaBoost學(xué)習算法與Logistic回歸算法效果對比Table 3 Comparison of AdaBoost learning algorithm andLogistic regression algorithm %
圖14中顯示,ROC曲線遠離參照線,說明文中分類器分類效果明顯,而且在車輛側(cè)翻過程中對側(cè)翻預(yù)測的準確度高。
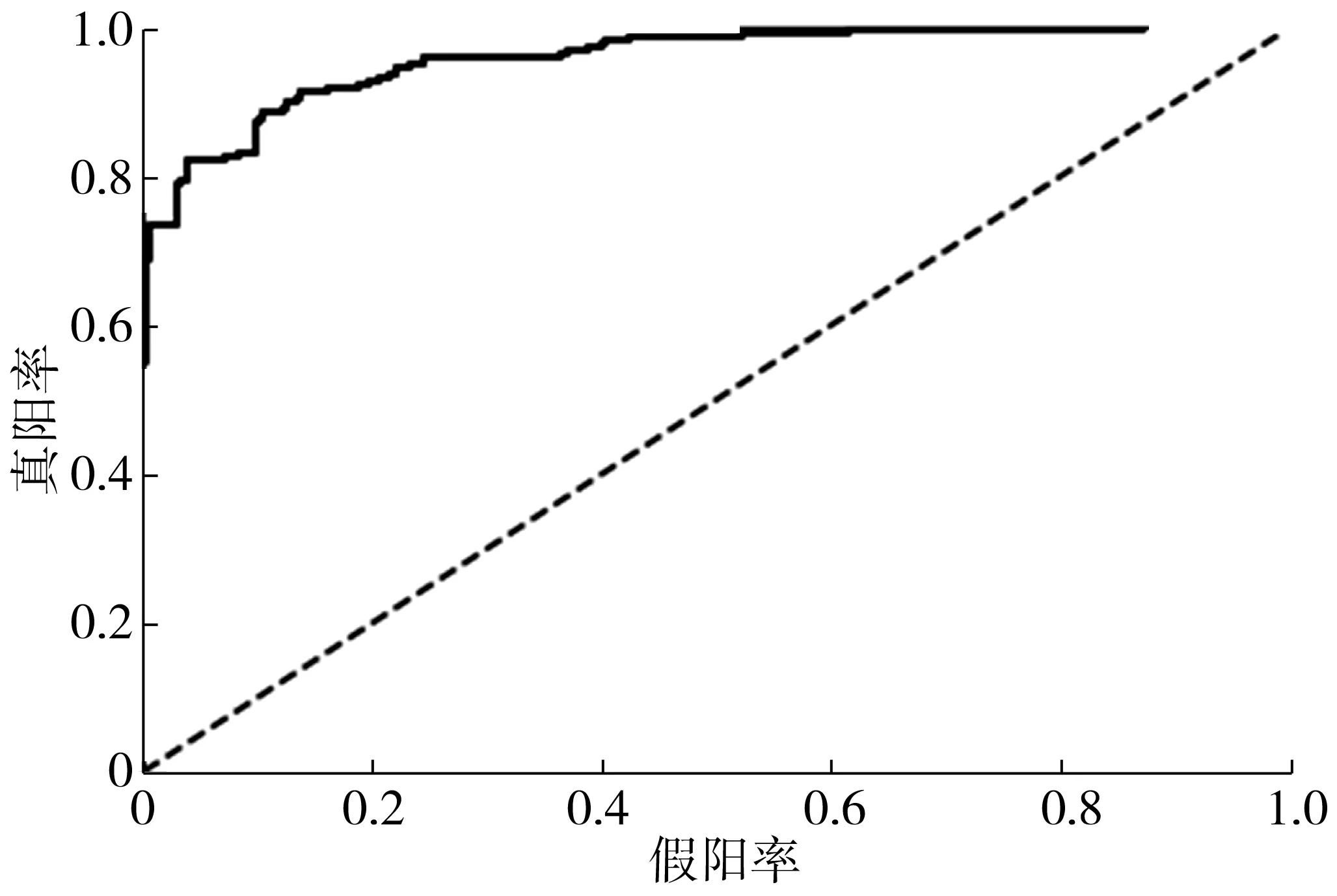
圖14 AdaBoost重型車輛側(cè)翻預(yù)警系統(tǒng)ROC曲線Fig. 14 ROC curve of AdaBoost heavy vehicle rolloverwarning system
AUC(area under curve)為ROC曲線下的面積。面積越大,模型的分類性能越好。計算出AUC為0.958,說明了AdaBoost算法側(cè)翻預(yù)警模型預(yù)測效果的有效性。
5 結(jié) 語
1)筆者在分析不同工況中時發(fā)現(xiàn),增加更多有關(guān)車輛穩(wěn)定性因素的參數(shù),或者增加訓(xùn)練數(shù)據(jù)樣本量可以提高預(yù)測的精度,為接下來的數(shù)據(jù)研究提供新的依據(jù)。
2)針對重型車輛側(cè)翻預(yù)警問題,設(shè)計了基于AdaBoost算法的車輛預(yù)警判據(jù)。仿真數(shù)據(jù)說明,筆者所設(shè)計的AdaBoost算法具有更高的預(yù)判精度,比Logistic回歸算法精度提高了24.9%,ROC曲線下AUC值為0.958,進一步驗證了AdaBoost算法模型預(yù)測效果的有效性與準確性。
3)基于AdaBoost算法的車輛側(cè)翻預(yù)警系統(tǒng),后續(xù)將應(yīng)用于整車控制器的開發(fā),利用實車試驗,驗證復(fù)雜工況下側(cè)翻預(yù)警的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03