基于激光雷達的水利工程質量安全檢測方法
2021-08-27 02:20:02韓友春金叢成
地下水 2021年4期
韓友春,金叢成
(江蘇禹衡工程質量檢測有限公司,江蘇 鹽城 224000)
水利工程質量安全檢測指的是具備資質的檢測單位對水利工程的施工質量、材料、產品等進行檢驗、度量,同時比較材料應用效果,確定水利工程質量是否符合標準[1]。由此可見,水利工程質量安全檢測是保障與維護水利工程質量安全的基本。
質量安全檢測是保障水利工程應用功能正常使用的根本保證,例如交通運輸功能、農田灌溉功能、防洪排澇功能等[2]。在本質上來看,質量安全檢測對一個國家的社會建設與經濟發展具有至關重要的意義。在水利工程質量安全檢測過程中,堤防質量安全檢測方法主要包含人工探視、地質鉆探等,混凝土質量安全檢測方法主要包含鉆芯法、回彈法與超聲波法等。
現有水利工程質量安全檢測方法中,主要采用鉆芯法檢測水利工程質量安全,該方法具備較高的探測精度,但也具備著一定的破壞性,并不具備連續性,導致現有方法存在檢測離散度較大、全面性參數較小的缺陷,為此提出基于激光雷達的水利工程質量安全檢測方法。激光雷達指的是以發射激光束探測目標位置、速度等特征量的雷達系統[3]。激光雷達是一種機械設施,具備分辨率高、隱蔽性好、抗干擾能力強、低空探測性能耗、體積小、質量輕等優勢,另外,激光雷達不會對水利工程造成損壞與影響,并可以全面的、準確的、連續的、高效的檢測水利工程質量安全。此研究引入激光雷達機械設施,希望改善現有方法存在的缺陷,提升水利工程質量安全檢測的性能。
1 水利工程質量安全檢測方法研究
1.1 激光雷達測線與天線布置
為了精確的檢測水利工程質量安全,引入激光雷達機械設施,首要的任務就是合理布置激光雷達測線與天線,具體布置過程如下所示。
依據水利工程質量安全相關規定,采用網格式布設激光雷達測線,具體情況如圖1所示。

圖1 激光雷達測線布置示意圖
如圖1所示,激光雷達測線橫向六條,間距為10 m;縱向4條,間距范圍為0.5~2 m。
采用美國GSSI SIR-30E雷達作為此研究激光雷達,其天線中心頻率包含40 MHz、100 MHz與200 MHz,每根天線布測上述激光雷達測線,共計10條檢測斷面[4]。依據水利工程實際情況,設置間距為1m加密檢測水利工程質量安全,總計檢測天線長度約為1500 m。激光雷達天線配置情況如表1所示。

表1 激光雷達天線配置表
上述過程完成了激光雷達測線與天線的布置,為下述水利工程質量安全檢測做準備。
1.2 激光雷達檢測參數設置
激光雷達檢測參數直接影響著激光雷達檢測的效果,其檢測參數包括天線中心頻率、時窗、采樣率與測點間距,具體參數設置過程如下所示。
天線中心頻率[5]主要由檢測目標深度、尺寸等因素來決定,計算公式為
(1)
式中:f表示的是天線中心頻率,單位為MHz;x表示的是空間分辨率,單位為m,實質上是激光雷達檢測物質尺寸最小值;εr表示的是相對介電常數。
當相對介電常數εr一致時,不同檢測深度對應著不同的天線中心頻率需求,具體如表2所示。

表2 深度對應天線中心頻率一纜表
時窗[6]計算公式為
(2)
式中:W表示的是數據采集時窗;dmax表示的是檢測深度最大值;V表示的是電磁波速度。
常規情況下,在激光雷達使用過程中,通過會將時窗增加30%,以此來保證檢測速度與深度含有一定的余量[7]。不同介質對應著不同的時窗需求,具體情況如表3所示。

表3 不同介質對應時窗一纜表
采樣率[8]由天線中心頻率決定,計算公式為
(3)
式中:ζt表示的是采樣率。
由式(3)可以看出,不同天線中心頻率對應著不同的最大間隔采樣時間,具體數值如表4所示。

表4 不同天線中心頻率對應最大間隔采樣時間一纜表
測點間距[9]由天線中心頻率與介質介電特征共同決定,計算公式為
(4)
式中:c表示的是測點間距計算常數,此研究中取值為75/4。
1.3 激光雷達檢測數據處理
以上述布置的激光雷達測線與天線以及設置的激光雷達檢測參數為基礎,確定激光雷達作業方程,獲取水利工程檢測數據,并對其進行相應的處理。
激光雷達作業方程[10]表達式為
(5)
式中:PR表示的是接收天線頻率;PT表示的是發射天線頻率;GT表示的是天線發射的增益數值[11];GR表示的是天線接收的增益數值;λ表示的是激光雷達子波在介質中傳播長度;g表示的是障礙物在激光雷達波面上發射的截面因素;α表示的是介質傳送的衰減系數;R表示的是障礙物與雷達天線的距離[12]。
若激光雷達與接收天線配合默契,則雷達信號有效部分與噪聲[13]比例關系表達式為
(6)
式中:S與N分別表示的是雷達信號有效部分與噪聲;N0表示的是噪聲周圍環境背景功率密度,計算公式為N0=2KB·T0·FN;KB表示的是波爾茨曼常數,取值為1.38×10-15J/k;T0表示的是溫度;FN表示的是噪音系數[14];GM表示的是常數,取值為1。
依據公式(5)獲取水利工程檢測數據,其處理程序如圖2所示。
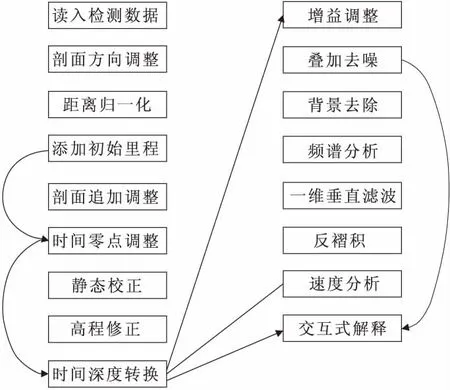
圖2 激光雷達檢測數據處理程序圖
如圖2所示,水利工程檢測數據處理子程序較多,由于篇幅的限制,此研究針對濾波處理與振幅恢復處理進行詳細分析。
濾波處理中,最關鍵的就是濾波參數的選取,具體選取規則如表5所示。

表5 濾波參數選取規則表
振幅恢復處理表達式為
A0=Ateβt
(7)
式中:A0表示的是反射波真振幅;A表示的是激光雷達的實際反射波振幅;t表示的是雙程走時時間;β表示的是吸收系數[15]。
1.4 激光雷達圖像精細化變換
以上述獲取的激光雷達檢測數據為基礎,為了能夠精確的凸顯雷達圖像特征,此研究利用K-L變換算法精細化變換激光雷達圖像[16]。
假設原始激光雷達圖像矩陣為XN×M,其協方差矩陣表達式為
CX=E{[X-E(X)][X-E(X)]T}
(8)
式中:E(X)表示的是X的數學期望。
求解公式(8)特征向量矩陣,表達式為
(9)
通過K-L變換算法正交轉換雷達圖像,轉換公式為
YN×M=AN×NTXN×M
(10)
通過上述過程完成了激光雷達圖像的精細化變換,為水利工程質量安全判斷提供依據。
1.5 水利工程質量安全判斷
以獲取的精細化激光雷達圖像為基礎,獲取激光雷達特征分布圖,橫軸為特征值序號,縱軸為特征值,依據激光雷達特征分布圖判斷水利工程質量安全狀況。
常見地質波形特征如表6所示。
如表6所示,若反射波波形時斷時續,同相軸不規整,表明混凝土結構質量較差;若雷達圖像中存在異常反射,則表明混凝土、隧道圍巖之間形成了空氣層,稱為脫空現象;若雷達圖像中,反射強度較弱,則表示水利工程中襯砌較為松散[17]。
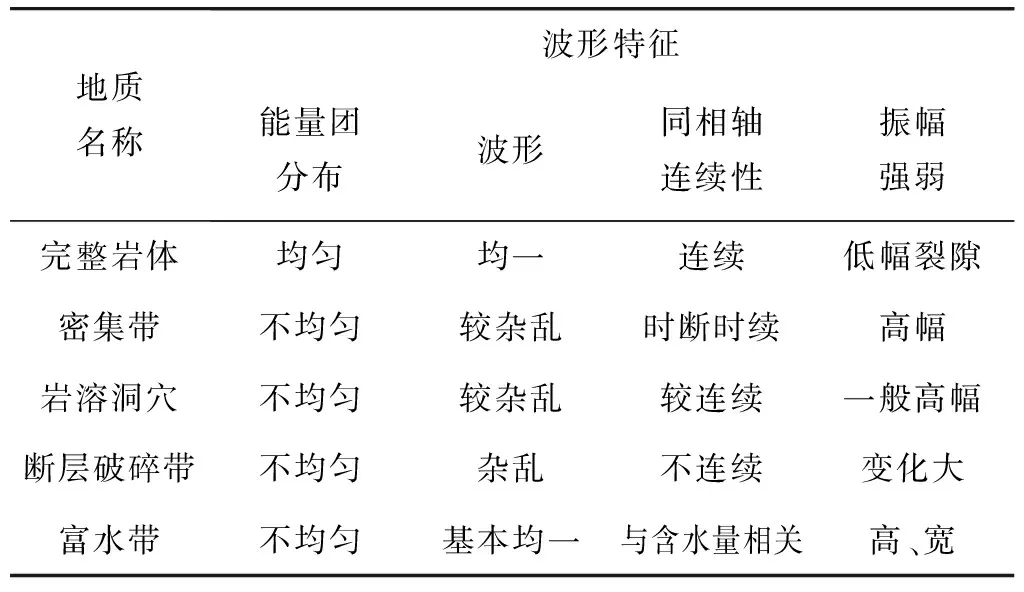
表6 常見地質波形特征表
綜上所述,實現了水利工程質量安全的檢測,為水利工程的建設與發展提供更加有效的幫助。
2 仿真實驗與結果分析
2.1 實驗對象選取
為了驗證提出方法的性能,設計仿真實驗,首要任務是選取實驗對象。選取某市二級排污河道水利工程作為實驗對象,其水流量為25 m3/s,是全市排水量的60%以上,承擔著排污的功能。
二級排污河道水利工程是該市關鍵排水河道,關系著居民的財產與生命安全,由此可見,實驗對象質量安全的重要程度。
實驗對象水利工程利用臨時圍堰、堤防全開挖方式進行,待水利工程完工后,拆除臨時圍堰,恢復堤防功能。為了保障堤防質量安全,利用激光雷達對其質量安全進行相應的檢測,具體實驗過程如下所示。
2.2 激光雷達檢測準備
在仿真實驗開始前,需要到水利工程現場進行詳細勘查,對實驗對象、尺寸、深度、交通狀況、工作環境等進行記錄。依據上述勘查信息,結合收集的相關資料,選取適當的天線中心頻率,合理布置激光雷達的測線與天線。
激光雷達機械設施連接示意圖如圖3所示。

圖3 激光雷達機械設施連接示意圖
激光雷達檢測方式主要包含反射、共中心點、寬角與透射四種方式,依據此研究需求,選取反射檢測方式,示意圖如圖4所示。

圖4 激光雷達反射檢測方式示意圖
另外,需要對激光雷達設備進行一定的保護。例如不折疊電纜繞圈、不重壓雷達電纜、不磨損激光雷達電纜線等。
上述過程完成了激光雷達檢測設備的準備,為仿真實驗的順利進行提供依撐。
2.3 實驗結果分析
依據上述選取的實驗對象、準備的激光雷達檢測數據等進行仿真實驗,通過檢測離散度與全面性參數反映方法性能,具體實驗結果分析過程如下所示。
通過仿真實驗得到檢測離散度數據如表7所示。
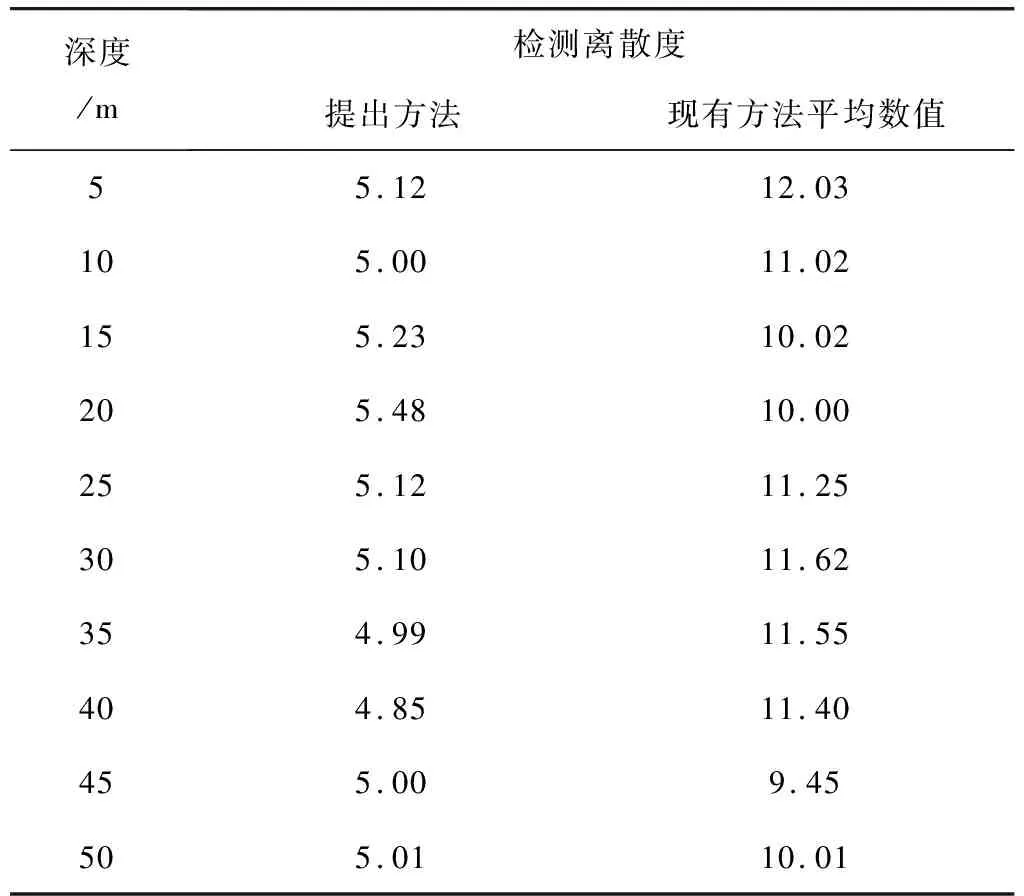
表7 檢測離散度數據表
如表7數據顯示,提出方法的檢測離散度參數范圍為4.85~5.48,現有方法平均數值范圍為9.45~12.03,通過對比研究發現,提出方法檢測離散度參數遠遠低于現有方法平均數值。
通過實驗得到檢測全面性參數數據如表8所示。

表8 檢測全面性參數數據表
如表8數據顯示,提出方法的檢測全面性參數范圍為8.45~9.45,現有方法平均數值范圍為4.26~6.45,通過對比研究發現,提出方法檢測全面性參數遠遠高于現有方法平均數值。
上述實驗結果顯示:與現有方法平均數值相比較,提出方法檢測離散度更小,全面性參數更大,充分說明提出方法水利工程質量安全檢測性能更佳。
3 結語
此研究將激光雷達引入到水利工程質量安全檢測方法設計中,極大的降低了方法檢測離散度,提升了方法檢測全面性參數,為水利工程質量安全提供了更加精確的檢測方法,為水利工程發展以及功能應用助力,適合大力推廣使用。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
意林原創版(2016年10期)2016-11-25 10:28:30
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
