基于灰色預(yù)測(cè)模型的井下精確人員定位方法
2021-09-02 12:09:02唐麗均吳畏劉世森
工礦自動(dòng)化 2021年8期
唐麗均, 吳畏, 劉世森
(1.重慶工程職業(yè)技術(shù)學(xué)院 大數(shù)據(jù)與物聯(lián)網(wǎng)學(xué)院,重慶 402260;2.重慶城市管理職業(yè)學(xué)院 智能工程學(xué)院,重慶 401331;3.中煤科工集團(tuán)重慶研究院有限公司,重慶 400039)
0 引言
為滿(mǎn)足煤礦井下定員管理和應(yīng)急救援的需求,許多學(xué)者基于接收信號(hào)強(qiáng)度指示(Received Signal Strength Indication,RSSI)、到達(dá)時(shí)間(Time of Arrival,TOA)、到達(dá)時(shí)間差(Time Difference of Arrival,TDOA)、飛行時(shí)間(Time of Flight,TOF)、到達(dá)角度(Arrival of Angle,AOA)等礦井無(wú)線(xiàn)實(shí)時(shí)定位技術(shù),設(shè)計(jì)了井下精確人員定位系統(tǒng)[1-4],用來(lái)掌握井下人員動(dòng)態(tài)分布情況和獲取采掘工作面人員數(shù)量,以提高井下人員工作安全系數(shù)。但由于礦井巷道空間狹小,巷道表面粗糙,且存在各類(lèi)障礙物,使無(wú)線(xiàn)信號(hào)發(fā)生反射、衍射和散射等非視距(Non Line of Sight,NLOS)傳輸,產(chǎn)生NLOS誤差,進(jìn)而影響系統(tǒng)定位精度[5-6]。此外,系統(tǒng)的時(shí)鐘誤差,如時(shí)鐘頻偏引起的定時(shí)誤差、收發(fā)設(shè)備時(shí)鐘同步誤差等[7-8],也是影響系統(tǒng)定位精度的重要因素。
目前井下精確人員定位系統(tǒng)主要采用基于卡爾曼濾波的定位方法來(lái)減小NLOS誤差和時(shí)鐘誤差[9-11],該方法根據(jù)上一時(shí)刻卡爾曼濾波后的最佳估計(jì)值與當(dāng)前時(shí)刻的測(cè)量距離進(jìn)行加權(quán)計(jì)算,從而得到當(dāng)前時(shí)刻的人員位置,但當(dāng)測(cè)量距離出現(xiàn)粗大誤差時(shí),該方法定位精度不高。灰色預(yù)測(cè)模型是通過(guò)少量的、不完全的信息,建立數(shù)學(xué)模型并做出預(yù)測(cè)的一種預(yù)測(cè)方法[12-14],用于灰色預(yù)測(cè)模型預(yù)測(cè)所需的原始數(shù)據(jù)不需要有規(guī)律性分布,模型預(yù)測(cè)準(zhǔn)確度高。因此,本文提出了一種基于灰色預(yù)測(cè)模型的井下精確人員定位方法,該方法不需要大量數(shù)據(jù),計(jì)算量小,能有效提高井下精確人員定位系統(tǒng)的定位精度。
1 方法原理
井下精確人員定位系統(tǒng)架構(gòu)如圖1所示。攜帶標(biāo)志卡的人員進(jìn)入定位讀卡器覆蓋范圍時(shí),定位讀卡器通過(guò)無(wú)線(xiàn)定位技術(shù)計(jì)算出標(biāo)志卡的位置,然后將其覆蓋范圍內(nèi)所有標(biāo)志卡的位置數(shù)據(jù)進(jìn)行匯集,再將匯集后的位置數(shù)據(jù)通過(guò)人員管理分站和交換機(jī)上傳至人員定位服務(wù)器。
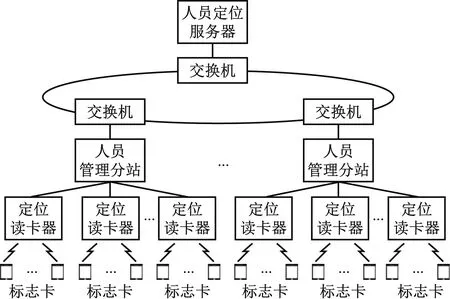
圖1 井下精確人員定位系統(tǒng)架構(gòu)
基于灰色預(yù)測(cè)模型的井下精確人員定位方法原理如圖2所示。首先給進(jìn)入定位讀卡器覆蓋范圍內(nèi)的每張標(biāo)志卡動(dòng)態(tài)分配一個(gè)數(shù)據(jù)緩存區(qū),定位讀卡器將標(biāo)志卡與讀卡器之間的測(cè)量距離存儲(chǔ)至該標(biāo)志卡對(duì)應(yīng)的數(shù)據(jù)緩存區(qū);然后根據(jù)數(shù)據(jù)緩存區(qū)內(nèi)的測(cè)量距離計(jì)算出誤差判斷閾值,并采用灰色預(yù)測(cè)模型計(jì)算出標(biāo)志卡與讀卡器之間的預(yù)測(cè)距離;再通過(guò)將預(yù)測(cè)距離與測(cè)量距離的差值和誤差判斷閾值進(jìn)行比較,更新標(biāo)志卡的位置數(shù)據(jù);最后將定位讀卡器覆蓋范圍內(nèi)所有標(biāo)志卡的位置數(shù)據(jù)匯集后上傳。當(dāng)標(biāo)志卡離開(kāi)定位讀卡器覆蓋范圍后,定位讀卡器將該標(biāo)志卡的數(shù)據(jù)緩存區(qū)刪除,以節(jié)省定位讀卡器存儲(chǔ)空間。
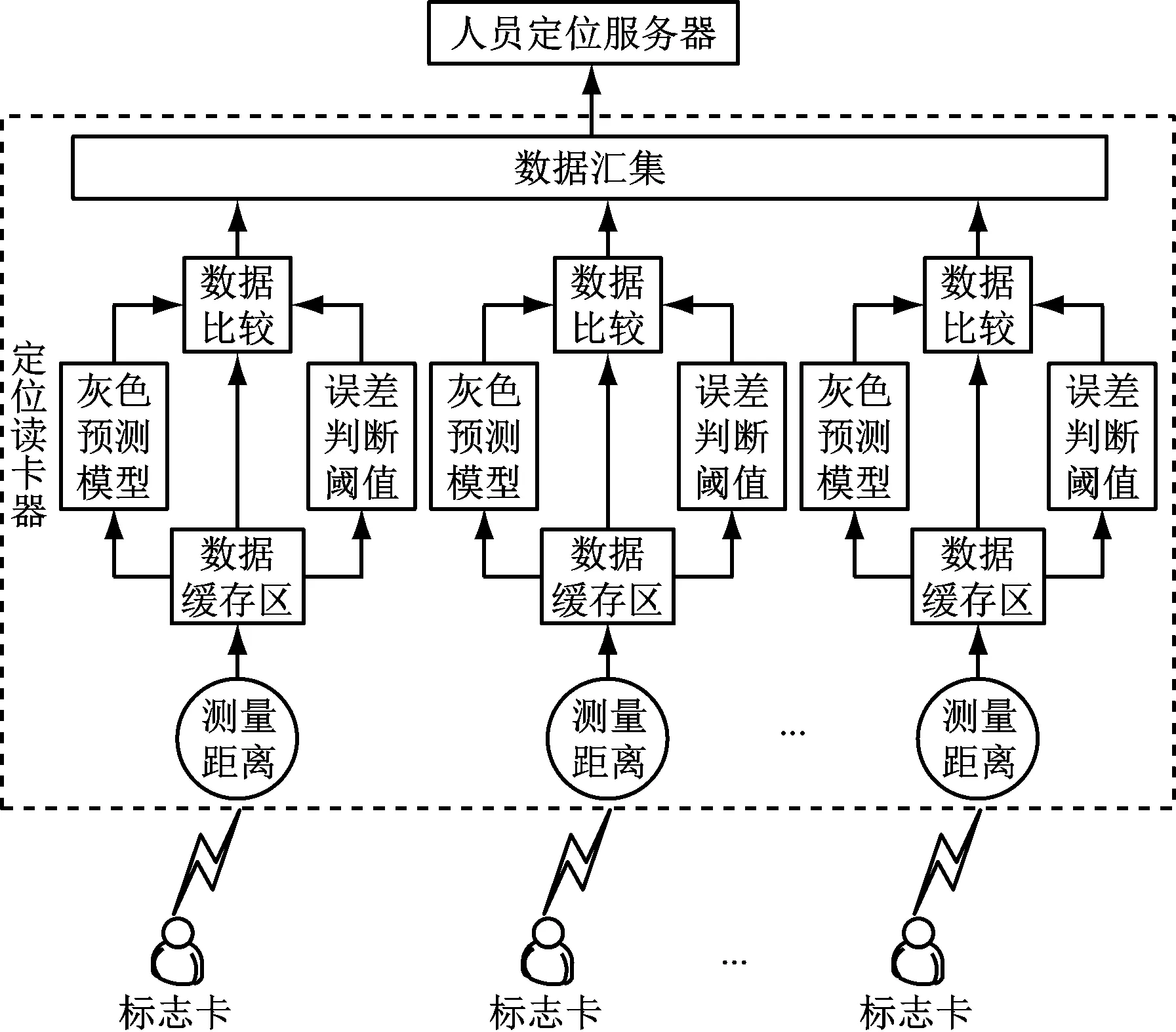
圖2 基于灰色預(yù)測(cè)模型的井下精確人員定位方法原理
2 方法實(shí)現(xiàn)
基于灰色預(yù)測(cè)模型的井下精確人員定位方法流程如圖3所示。根據(jù)數(shù)據(jù)緩存區(qū)內(nèi)前N個(gè)時(shí)刻的測(cè)量距離,采用GM(1,1)模型計(jì)算出第N+1時(shí)刻的預(yù)測(cè)距離;如果該預(yù)測(cè)距離的精度等級(jí)為優(yōu),且與測(cè)量距離的差值超過(guò)誤差判斷閾值,則用該預(yù)測(cè)距離替代測(cè)量距離,更新測(cè)量距離數(shù)列,反復(fù)循環(huán),直到標(biāo)志卡離開(kāi)定位讀卡器覆蓋范圍。
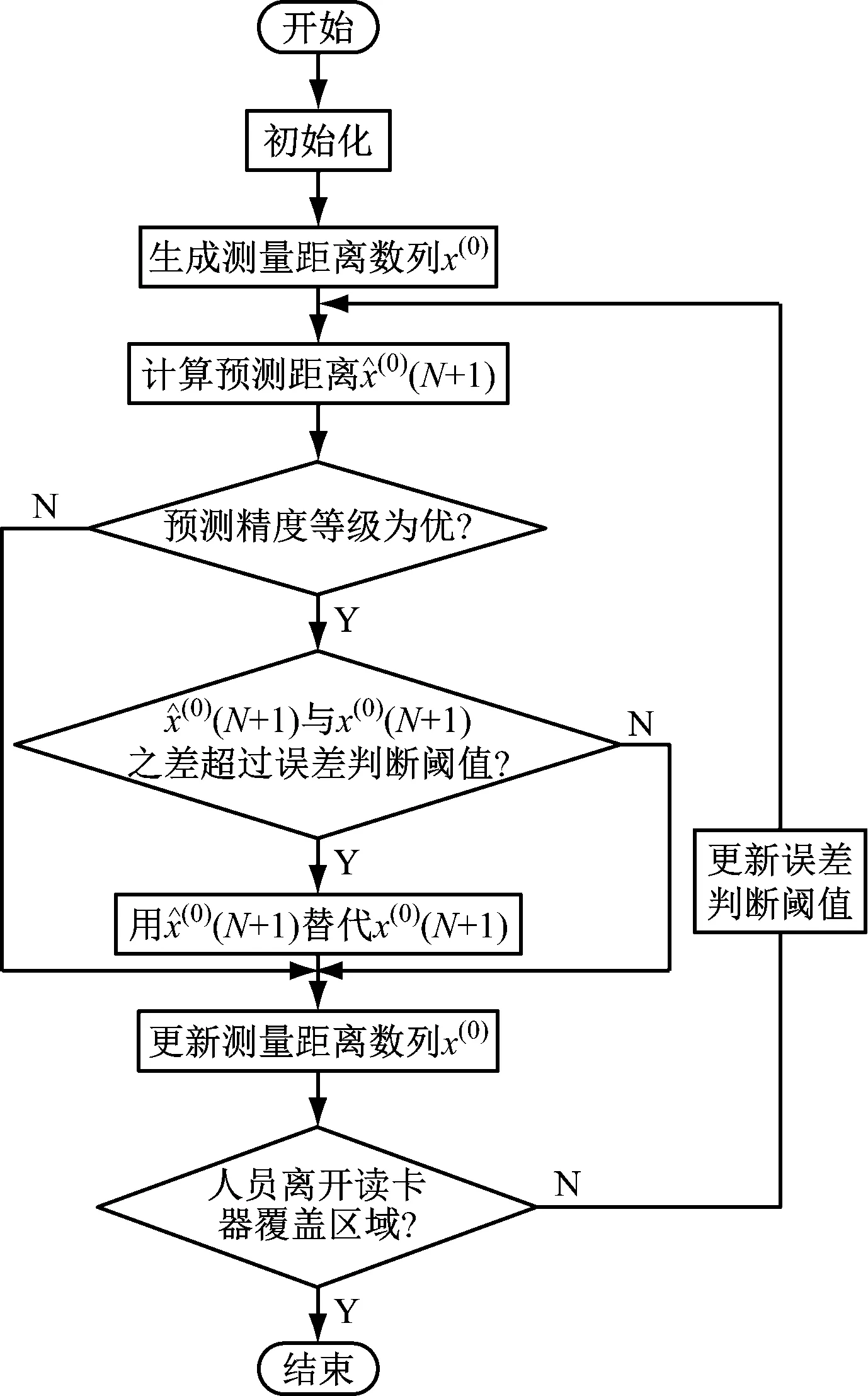
圖3 基于灰色預(yù)測(cè)模型的井下精確人員定位方法流程
基于灰色預(yù)測(cè)模型的井下精確人員定位方法具體實(shí)現(xiàn)步驟如下。
(1)設(shè)置數(shù)據(jù)緩存區(qū)長(zhǎng)度N和初始誤差判斷閾值Xthr。
(2)按照等時(shí)間間隔對(duì)標(biāo)志卡與讀卡器之間的測(cè)量距離進(jìn)行采樣,生成離散化的測(cè)量距離數(shù)列:
x(0)={x(0)(1),x(0)(2),…,x(0)(N)}
(1)
式中x(0)(k)為第k(k=1,2,…,N)時(shí)刻的測(cè)量距離。
(3)為弱化測(cè)量距離的隨機(jī)性和波動(dòng)性,將x(0)進(jìn)行一次累加,生成累加數(shù)列x(1)={x(1)(1),x(1)(2),…,x(1)(N)},x(1)(k)為第k時(shí)刻測(cè)量距離的累加值。
x(1)(1)=x(0)(1)
(2)
x(1)(k)=x(1)(k-1)+x(0)(k)k=2,3,…,N
(3)
GM(1,1)模型白化微分方程為
(4)
式中:t為時(shí)間;a為發(fā)展灰度,表征數(shù)列x(1)的發(fā)展規(guī)律和趨勢(shì);u為控制灰度,反映數(shù)列x(1)的變化關(guān)系。
由最小二乘法估計(jì)a,u:
(5)


(6)
則第N+1時(shí)刻的預(yù)測(cè)距離為
(7)
(4)生成殘差序列:
(8)
x(0)的均方差為
(9)

殘差序列E(k)的均方差為
(10)

計(jì)算后驗(yàn)差比值C和小誤差概率P:
C=S1/S2
(11)
(12)

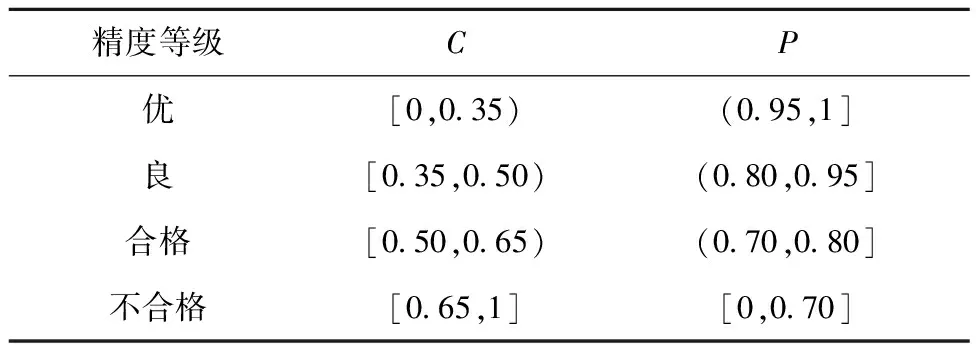
表1 預(yù)測(cè)精度等級(jí)
(6)更新測(cè)量距離數(shù)列x(0),即
x(0)(k)=x(0)(k+1)
(13)

(14)
(15)
3 測(cè)試驗(yàn)證
為驗(yàn)證基于灰色預(yù)測(cè)模型的井下精確人員定位方法的有效性,在黑龍江龍煤礦業(yè)集團(tuán)股份有限公司某煤礦搭建井下精確人員定位系統(tǒng)并進(jìn)行測(cè)試,如圖4所示。巷道寬3 m,高4.5 m。測(cè)試人員攜帶標(biāo)志卡,從定位讀卡器處勻速前進(jìn)至距定位讀卡器300 m處,然后靜止不動(dòng)一段時(shí)間,再勻速返回定位讀卡器處,測(cè)試參數(shù)見(jiàn)表2。

圖4 測(cè)試場(chǎng)景
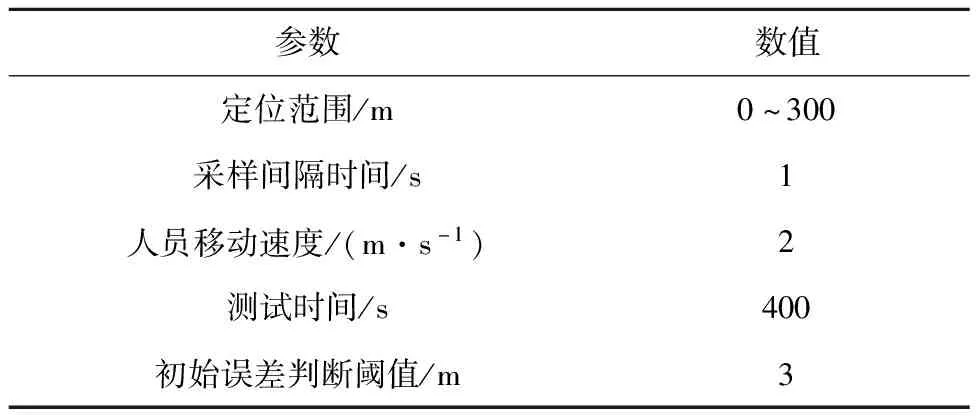
表2 測(cè)試參數(shù)
井下精確人員定位系統(tǒng)分別使用基于卡爾曼濾波的定位方法和基于灰色預(yù)測(cè)模型的定位方法時(shí),人員運(yùn)動(dòng)軌跡定位對(duì)比如圖5所示。可看出系統(tǒng)在定位人員運(yùn)動(dòng)軌跡時(shí)出現(xiàn)4個(gè)異常點(diǎn),異常點(diǎn)處測(cè)距誤差較大,基于卡爾曼濾波的定位方法在異常點(diǎn)處的定位誤差仍偏大,而基于灰色預(yù)測(cè)模型的定位方法在異常點(diǎn)處的定位誤差很小。
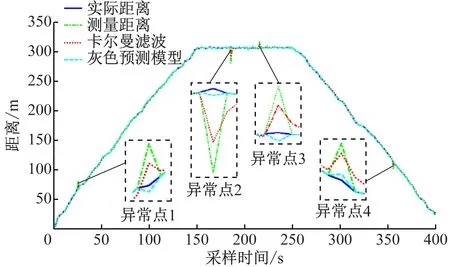
圖5 不同定位方法下人員運(yùn)動(dòng)軌跡定位對(duì)比
基于卡爾曼濾波的定位方法和基于灰色預(yù)測(cè)模型的定位方法在異常點(diǎn)處的定位誤差對(duì)比見(jiàn)表3。可看出基于卡爾曼濾波的定位方法受測(cè)距誤差影響較大,定位誤差大于5.5 m,這是由于基于卡爾曼濾波的定位方法是根據(jù)當(dāng)前時(shí)刻的測(cè)量距離和預(yù)測(cè)距離與實(shí)際距離的偏離程度,不斷更新測(cè)量距離和預(yù)測(cè)距離所占權(quán)重;基于灰色預(yù)測(cè)模型的定位方法不受測(cè)距誤差影響,定位誤差在1.1 m之內(nèi),這是由于基于灰色預(yù)測(cè)模型的定位方法不使用當(dāng)前時(shí)刻的測(cè)量距離來(lái)計(jì)算預(yù)測(cè)距離,所以無(wú)論當(dāng)前時(shí)刻的測(cè)距誤差多大,都不會(huì)對(duì)定位精度產(chǎn)生影響。
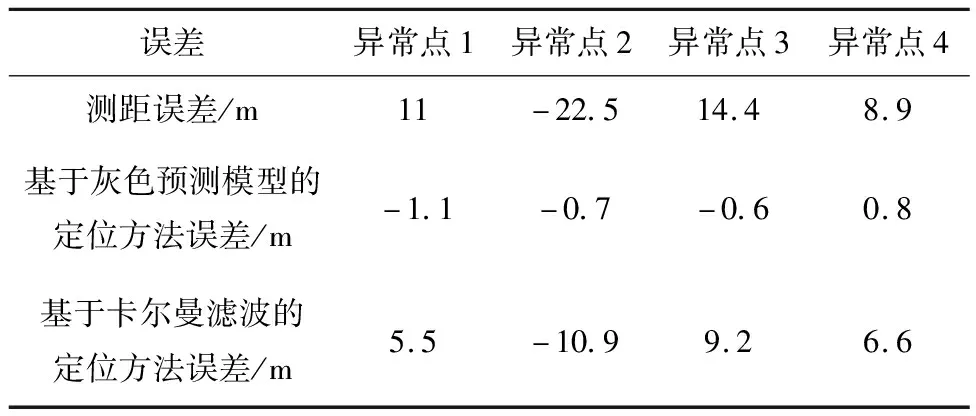
表3 不同定位方法下異常點(diǎn)處定位誤差對(duì)比
4 結(jié)語(yǔ)
提出了基于灰色預(yù)測(cè)模型的井下精確人員定位方法。該方法根據(jù)定位讀卡器中數(shù)據(jù)緩存區(qū)內(nèi)標(biāo)志卡與讀卡器之間的測(cè)量距離,采用灰色預(yù)測(cè)模型計(jì)算下一時(shí)刻標(biāo)志卡與讀卡器之間的預(yù)測(cè)距離,使用精度高的預(yù)測(cè)距離替代測(cè)量距離,實(shí)現(xiàn)了對(duì)測(cè)距誤差的優(yōu)化補(bǔ)償。測(cè)試結(jié)果表明,該方法不受測(cè)距誤差影響,當(dāng)測(cè)量距離存在粗大誤差時(shí),該方法的定位精度明顯優(yōu)于基于卡爾曼濾波的定位方法。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
