肝腫瘤熱消融穿刺機器人導航定位方法研究
2021-09-03 09:38:28伍國林姜濤吳薇薇吳水才周著黃
中國醫療設備 2021年8期
關鍵詞:手術
伍國林,姜濤,吳薇薇,吳水才,周著黃
1.北京工業大學 生物醫學工程系,北京 100124;2.首都醫科大學 生物醫學工程學院,北京 100069
引言
原發性肝癌仍是現今最常見的惡性腫瘤之一[1]。早期肝癌患者可接受手術切除、肝移植和腫瘤消融等手術治療,其中手術切除為首選治療方案[2-3]。但是大部分肝硬化和中晚期的病人不適合進行外科手術,大約每年只有20%~30%的病人能夠獲得手術切除的機會[4]。
隨著醫學成像技術的進步,局部熱消融技術用于治療肝癌的方法得到大力發展,使不適宜進行手術切除的患者能夠獲得根治的機會[5-7]。肝癌局部消融術的分類多樣,以微波/射頻消融術的應用最廣[8-10],目前已廣泛應用于臨床,成為治療肝癌最常見的腫瘤消融方法之一[11-12]。但是,目前臨床消融治療中消融針的插入、消融參數的設置等主要依賴于醫生的個人經驗,手術過程中由于病人的呼吸、體位的改變或插入過程中施加的組織力而導致軟組織移位,從而降低了熱消融針的準確定位[13-14]。近年來,介入導航系統成為腫瘤消融領域的研究熱點[15-16]。據報道,介入導航機器人能夠避免單純依靠醫生的個人經驗進行手術操作,有效提高穿刺的準確率,避免反復進針,從而減少消融手術時間和輻射暴露時間[17-20]。
本文對CT引導肝腫瘤熱消融穿刺機器人導航定位方法進行研究,目的是減少病人臨床手術的多次CT掃描,輔助醫生進行手術操作,提高肝腫瘤熱消融手術穿刺的準確度。
1 方法
1.1 術中定位技術
在影像引導的介入手術治療中,手術消融針的定位引導至關重要。機器人手術導航系統按照其定位原理的不同可分為機械定位、超聲定位、光學定位和電磁定位,目前在腫瘤熱消融領域后兩者應用更加廣泛[21]。電磁定位設備體積小、易測量、操作方便、穿透性強、不怕遮擋、精確度較好,但該定位技術結果易受金屬及磁體等影響,如室內監護儀、麻醉機和高頻電刀等設備產生的外界電磁波會干擾用于定位的電磁場。根據現有條件,在穿刺導航機器人方法研究中選擇NDI Aurora電磁跟蹤系統作為術中定位設備。NDI Aurora可在遮擋的情況下進行精確實時的空間三維測量,系統采用微小傳感器線圈跟蹤測量消融針的實時位置。
1.2 空間坐標配準算法
空間配準是一個坐標空間和另外一個坐標空間的映射與變換。在手術導航系統中,空間配準是指將病人CT序列重建后的三維影像與患者所在電磁定位儀的磁空間中的坐標進行配準。
1.2.1 基于SVD矩陣分解的坐標配準算法
假設有兩個空間坐標系,它們之間存在一一對應的點集Q={qi,i=1,2,…,n}和P={pi,i=1,2,…,n},基于成對點集的空間配準算法就是找出這兩個點集之間的對應關系,兩者之間存在如式(1)關系:

其中,R和T分別表示空間坐標變換所需的旋轉矩陣和平移矩陣。對空間點集中的每一個對應點qi和pi作相應的線性變換都會存在誤差εi,需要找到合適的最優旋轉矩陣R和最優平移矩陣T,使得對所有的εi(i=1,2,…,n)統計平均誤差最小,其計算公式如式(2):

故空間坐標配準算法的本質是求解出最優的旋轉矩陣R和平移矩陣T使得式(2)取得最小值。其中,qi和pi用3×1的列向量表示,其中的元素表示點集的三維坐標值,因為qi和pi是一一對應的,所以{qi}和{Rpi+T}具有相同的重心。
計算兩個點集Q和P的重心q0和p0,可知q0和p0滿足式(3)和式(4):

設qi'和pi'為重心平移到原點后的數據,則由式(3)和式(4)可得式(5):


然后對矩陣H進行SVD分解,得到U、S和V三個矩陣。其中U和V都是3×3的正交矩陣,S是3×3的對角陣,U、S和V中的所有元素都大于等于0。則旋轉矩陣R=VUT,由式(1)可計算得到平移矩陣T。
1.2.2 基于四元數的坐標配準算法
Horn于1986年提出了一種基于四元數的最小二乘法求解相鄰點云數據之間的運動學參數,目前應用最廣泛的點云配準算法ICP法采用的就是這種方法進行運算。單位四元數是一個包含4個矢量的矩陣,見式(7):


由四元數可構建旋轉矩陣R,見式(8):
基于四元數的坐標配準算法亦是要求解出最優的旋轉矩陣R和平移矩陣T。其算法的步驟如下:
(1)由式(6)得協方差矩陣H。
(2)構造特征矩陣,假設有反對稱矩陣B,和向量Δ,見式(9)~(10):

其中,Δ為特征矩陣。
(3)根據特征矩陣Δ計算對稱矩陣C,見式(11):

其中,tr(H)表示矩陣H的跡,I3表示3×3的單位矩陣。
(4)計算矩陣C的最大特征值對應的特征向量,即為四元數q,根據式(7)和式(8)可以求得旋轉矩陣R。
(5)最后由式(1)可解得平移矩陣T。
1.3 導航機器人系統整體結構
如圖1所示,整個機器人手術導航系統有4個部分組成:UR5機械臂、NDI電磁定位儀、腹部體模和三維影像處理系統。機械臂采用的是丹麥Universal Robots公司生產的UR5機械手臂。電磁定位儀采用的是加拿大NDI公司生產的NDI Aurora電磁跟蹤系統,可在遮擋的情況下進行精確實時的空間三維測量。腹部體模采用的是美國Cirs 071A圖像引導腹部穿刺體模,Cirs 071A腹部體模包含12個病灶,它還包括模擬脊柱和肋骨,以及脊柱內的“H”標記,以幫助確定CT圖像中的頭側。三維影像處理系統采用移動工作站,配有所設計的圖像處理與機械臂控制軟件。系統控制方法如圖2所示。
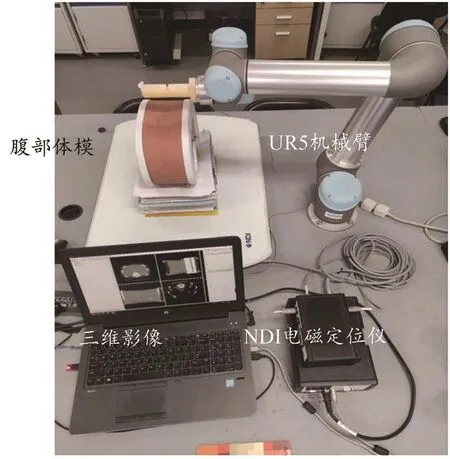
圖1 導航機器人系統整體組成
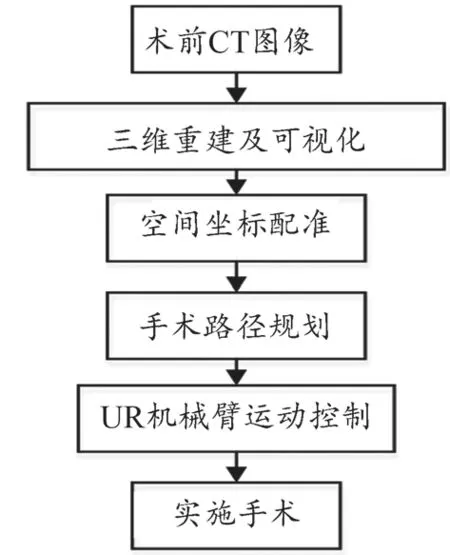
圖2 系統控制流程
1.4 導航機器人系統坐標配準
1.4.1 機械臂與電磁定位儀的配準
圖3是機械臂空間坐標與電磁空間坐標之間配準的示意圖,其中圖3a是圓片狀的電磁定位器,一端連接著機械臂末端的消融針定位槽(圖3b),其中紅色圈部分就是圓片電磁定位器。其另一端連接著電磁定位儀(圖3c)。移動機械臂末端,生成至少四對坐標點,且該四對坐標點不在同一平面中,使用生成的點集,即可完成機械臂與電磁空間之間的配準。

圖3 機械臂與電磁定位儀的配準圖
1.4.2 三維影像與電磁定位儀的配準
圖4是三維影像與電磁定位儀配準的示意圖。圖4a顯示的是腹部體模表面的標志點,前后一共有6個(紅色圓圈所標注的地方),標志點的作用是使其在CT三維影像中能夠明顯地顯示出來,方便坐標配準。圖4b所示,左邊是三維影像的某一層切面,其中A、B、C三個標志點的位置,分別對應右邊標志點在腹部體模的實際位置A’、B’、C’。首先通過CT三維成像軟件選取標志點A,得到其在三維影像中的坐標。然后使用針形電磁定位針(圖4a)末端觸碰A對應在體模位置的點A’,得到其在電磁空間中的坐標。以此類推,在三維影像與電磁空間中至少各取4個對應的標志點,即可完成這兩個坐標系之間的配準。
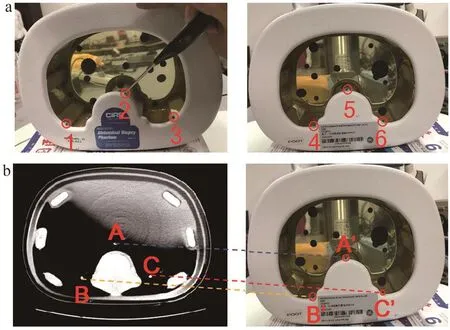
圖4 三維影像與電磁定位儀配準
1.4.3 三維影像和機械臂的配準
在1.4.1及1.4.2中已經完成電磁空間和機械臂空間的配準、電磁空間和三維影像空間的配準,由此即可推算出三維影像空間和機械臂空間的轉換關系,完成坐標配準。如圖5所示,三維影像坐標系中顯示的是腹部體模的三維影像,其中紅色球狀物是模擬的腫瘤,黃色線是手動規劃的路徑,要求是:① 避開關鍵結構(大血管、骨骼等其他器官);② 盡量沿著腫瘤離皮膚較近的距離,減少插入深度。當手動規劃好路線后,因兩坐標系已經配準,可得到該路線在機械臂空間中的位置。此時機械臂就會自動移動位置,使得機械臂末端消融針定位槽到達規劃位置處,消融針沿著槽孔插入體模。設定好消融針長度,使其準確插入腫瘤內部。
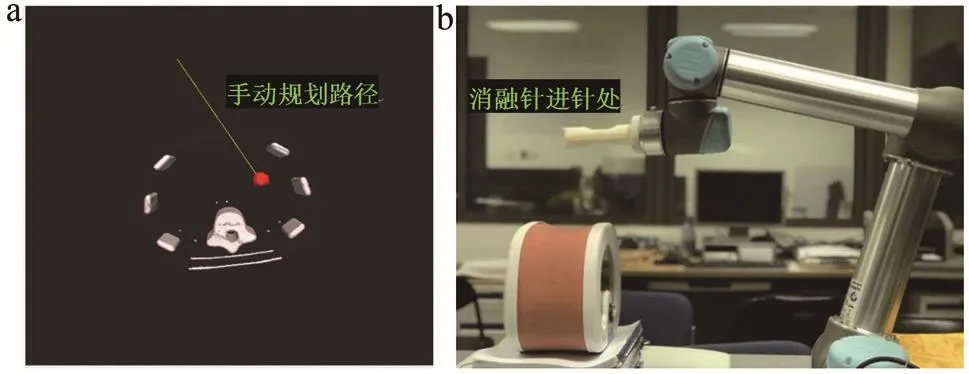
圖5 三維影像和機械臂配準
2 結果
對腹部體模進行消融針插入實驗。在PC端發送相關指令,當機械臂定位到指定位置后,手持消融針柄,沿著機械臂末端消融針定位槽插入至體模內部。圖6a是將消融針插入體模后的結果,經觀察可看出消融針針尖部位已經插入到模擬的腫瘤內部。圖6b中存在兩條線段,一條黃色線段(表示規劃路徑),一條藍色虛線(表示實際進針路徑)。圖6b中兩條路徑重合,即表示消融針實際的進針路徑和規劃路徑一致。
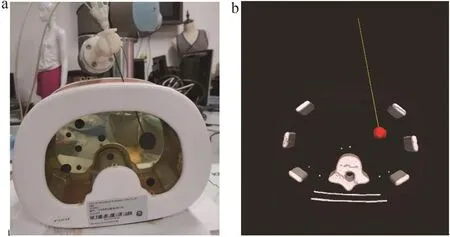
圖6 消融針插入體模
在該實驗中,我們選用了5個模擬腫瘤進行消融針穿刺實驗,實驗結果如表1所示。其中目標位置誤差為穿刺后消融針針尖位置與模擬腫瘤的近似中心位置的均方根誤差。在5個腫瘤穿刺實驗中,操作者均為實驗室人員,無相關臨床操作經驗。在導航系統的輔助下進行穿刺操作,記錄進針次數與目標位置誤差。在無導航系統引導時,其他條件相同的情況下進行模擬腫瘤穿刺實驗,記錄進針次數與目標位置誤差。
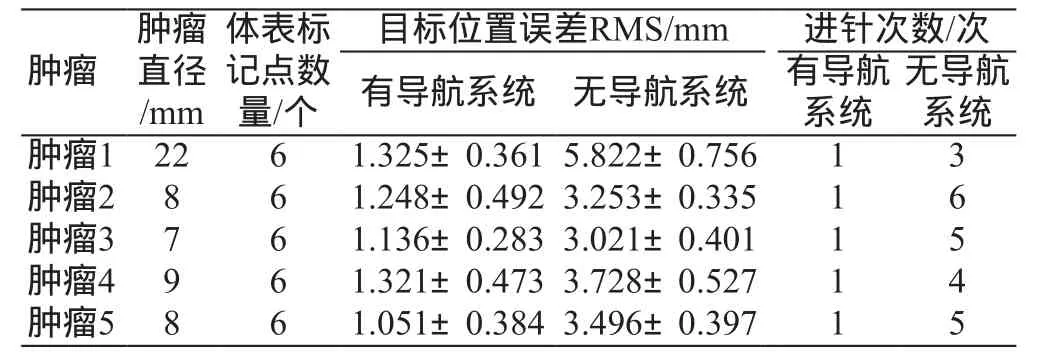
表1 模擬腫瘤穿刺實驗結果
3 討論
本文通過NDI定位儀,UR5機械臂等實現了CT引導的肝腫瘤熱消融手術輔助導航系統。在體模實驗中,以有導航系統引導為試驗組,無導航系統引導為對照組進行模擬腫瘤穿刺實驗。通過表1中的數據可以發現試驗組的進針次數與目標位置誤差明顯小于對照組(P<0.05)。在對照組實驗中,由于該體模透明,可觀察到消融針進針過程,在很大程度上能減少進針誤差及進針次數。如果體模非透明,無穿刺經驗的實驗人員很難將消融針準確插入模擬腫瘤中。而在導航系統引導下只需沿著機械臂末端插槽將消融針插入即可,表明該導航系統對腫瘤熱消融的穿刺操作具有一定的輔助作用。
基于電磁定位的肝腫瘤熱消融機器人系統,通過電磁導航儀完成患者的實時跟蹤,通過機器人完成手術路徑規劃,為最終的手術定位精度提供保障。該系統可以有效地克服徒手手術方法的缺點,為將手術導航系統應用于臨床消融手術提供了一定的研究基礎。
本文主要研究工作如下:① 實現肝腫瘤熱消融導航機器人空間坐標配準,以肝腫瘤熱消融導航機器人導航定位方法為研究對象,完成了各空間坐標配準,以電磁空間坐標為基準,實現機械臂空間坐標和三維影像坐標之間的轉換;② 實現肝腫瘤熱消融機器人導航定位控制,設計了機器人導航控制軟件,通過PC和機器人之間的通信連接,實現在PC端對機器人的坐標讀取、空間移動等操作。通過獲取相關空間坐標,計算出配準矩陣并得出目標點坐標,控制機器人移動到指定位置,進行體模實驗。初步驗證了所提出方法的準確性和可靠性。
對于本文研究內容,仍存在一些問題,有待進一步改進:① 圖像配準基準點選擇的是體外標志點,沒有選擇人體解剖標志點進行相關實驗,Doba等[22]介紹了一種利用內基準點進行圖像導航的新裝置,利用該裝置可以提高圖像導航系統的精度;② 目前該系統還處于實驗階段,距臨床實驗還有一定的距離,因而缺少相應的臨床消融數據及該系統的實際應用效果;③ 由于患者的呼吸作用,會使肝臟有一定位移,從而對配準的精度有一定的影響,進而影響消融手術的穿刺精度,本文后續要研究呼吸作用下的相應補償。
4 結論
本文設計了一種基于CT引導肝腫瘤熱消融穿刺機器人導航系統,主要包括空間坐標配準、機械臂定位與消融針導航。通過體模穿刺實驗,初步驗證了該手術導航系統的準確性。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48
