一種初級調平系統在擴展式方艙載車上的設計與應用
2021-09-03 18:27:17李曉偉何治斌劉敏楊凱
今日自動化 2021年6期
李曉偉 何治斌 劉敏 楊凱
[摘 ? ?要 ]文章為某擴展式方艙、載車項目而研究的一種滿足載車調平的手動調平系統,該系統可以滿足方艙、載車展開工作狀態下的初級調平需求,具有操作便捷、可靠性高、維修簡單、性價比高等特點。
[關鍵詞]擴展式方艙;載車;調平系統
[中圖分類號]TN959.4 [文獻標志碼]A [文章編號]2095–6487(2021)06–00–03
[Abstract]This paper studies a kind of manual leveling system for an extended shelter and vehicle carrying project, which can meet the primary leveling requirements of shelter and vehicle carrying, and has the characteristics of convenient operation, high reliability, simple maintenance and high cost performance.
[Keywords]extended shelter; Vehicle loading; Leveling system
某擴展式方艙、載車作為為地面裝備及人員提供集中、適宜工作環境的機動性載體,在方艙展開工作狀態前,需要對整車進行初級調平,才能消除路面凹凸不平或坡度等因素對展開機構運動的影響,確保擴展過程運行順暢。然而傳統的“調平支腿+水泡”的調平方式,雖然價格便宜,但是操作流程粗糙、精度差,更加依賴于操作人員的技術水平;而載車自動調平系統的機構復雜、精度要求過高、調平時間長且價格昂貴,在某些對整車水平精度要求不高且預算有限的載車項目中并不適用。
為了滿足上述技術要求及項目特點,開發一套載車初級調平、手動操作的調平系統,經過相關的理論分析、設計計算和實例驗證,該調平系統滿足載車技術指標要求,具有良好的推廣價值和市場前景。
1 調平系統方案探討
由于路面、自身載重分布等因素影響,整車進入展開工作狀態前,一般車身均不在水平狀態。為了滿足裝備工作條件需要,需要對整車進行初級調平。對于擴展式方艙、載車來說,初級調平對精度的要求不高,只需要滿足工作狀態需要,消除工作場地的路面凹凸不平或坡度等因素對展開機構運動過程的影響,所開發系統對調平精度要求控制在10′以內,需可靠性高、撤收便捷。而當前市面所用的車載自動調平系統精度高,價格相當昂貴,對預算有限的載車項目來說,并不是最佳選擇。本方案采用的手動調平系統,通過多參數智能顯示指導、人工調節支腿升縮量方法實現載車快速調平。
2 組成及工作原理
2.1 手動調平系統的組成
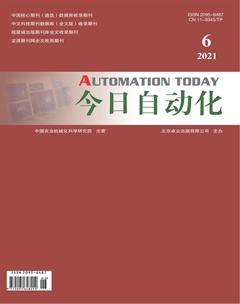
手動調平系統是由4套調平支腿、1套雙軸傾角傳感器、1個調平指示箱等部分組成(圖1)。調平指示箱內部設有調平控制器、顯示屏、供電開關、復位按鈕、保險等。
2.2 工作原理
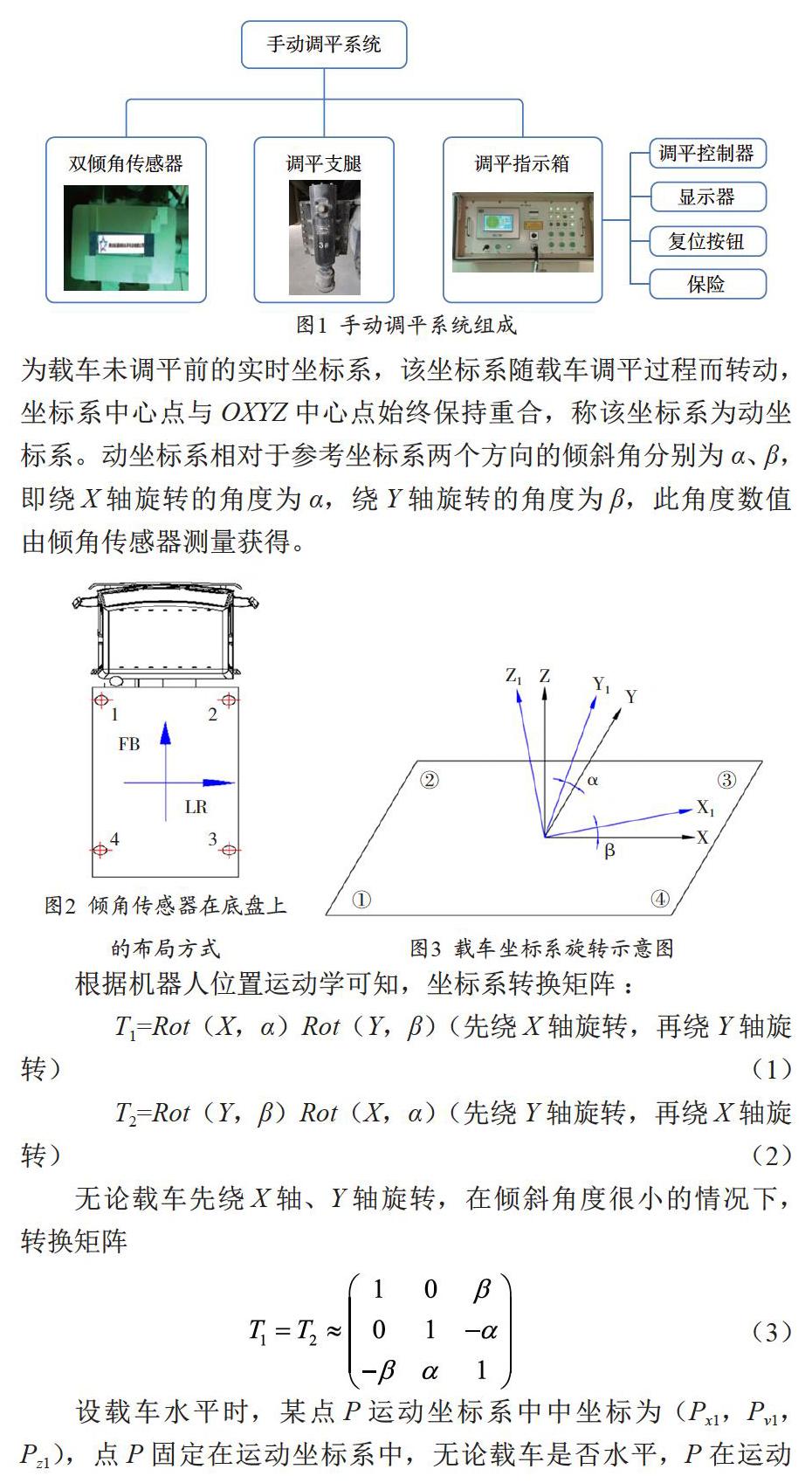
將傾角傳感器盡量布設在載車底盤的幾何中心位置(圖2),用以檢測載車在X、Y兩個方向的傾斜角,其中FB為前后水平角,LR為左右水平角,各對應位置的支腿編號為①、②、③、④。如圖3所示,OXYZ為載車處于水平狀態時的坐標系,稱之為參考坐標系,坐標系中心點為載車幾何中心,坐標系保持水平。OX1Y1Z1為載車未調平前的實時坐標系,該坐標系隨載車調平過程而轉動,坐標系中心點與OXYZ中心點始終保持重合,稱該坐標系為動坐標系。動坐標系相對于參考坐標系兩個方向的傾斜角分別為α、β,即繞X軸旋轉的角度為α,繞Y軸旋轉的角度為β,此角度數值由傾角傳感器測量獲得。
將Pz1、Pz2、Pz3、Pz4分別代入公式(6)中,而Pmax取Pz1~Pz4中的最大值,通過計算可得出對應序號支腿的所需轉動圈數。
接通電源后,通過系統控制器實時檢測、軟件算法分析計算,將以下數據實時顯示在調平指示板的屏幕上(圖4)。
(1)支腿編號。
(2)載車雙向傾角。
(3)載車達到水平時支腿手輪所需轉動的理論圈數。
(4)X-Y圖像的十字光標位置。
(5)誤差光圈。
(6)載車狀態指標。
觀察員觀測調平顯示界面的各參數及十字光標位置。高亮顯示的十字光標,代表載車傾斜方向與傾斜程度,可直觀理解為一顆“玻璃球”放置在斜面上。操作人員根據實時顯示狀態及數據,針對性對各編號對應支腿進行升高操作,采用前面所述的“追趕法”先調節X軸至水平狀態,然后再對Y軸進行調平,直至X、Y軸均達到水平。最后,整車調平結束。
3 主要性能指標
(1)調平精度:±10′以內。
(2)測量范圍:±5°。
(3)工作時間:3 min。
(4)支腿行程:0~300 mm。
(5)整套額定承載:60 t。
(6)供電電壓:24±10% VDC。
(7)工作溫度:-40~55 ℃。
(8)配備人員:3~4人。
4 調平系統特點
(1)展開速度快,接通電源,解鎖支腿即可。
(2)操作易上手,對人員技術水平要求低。
(3)調平精度適中,可滿足擴展類方艙載車的基本需求。
(4)價格低,富有市場競爭力。
5 調平操作流程
5.1 調平前準備工作
(1)將車輛停放在可展開的平坦路面,盡量避免坑洼路面。
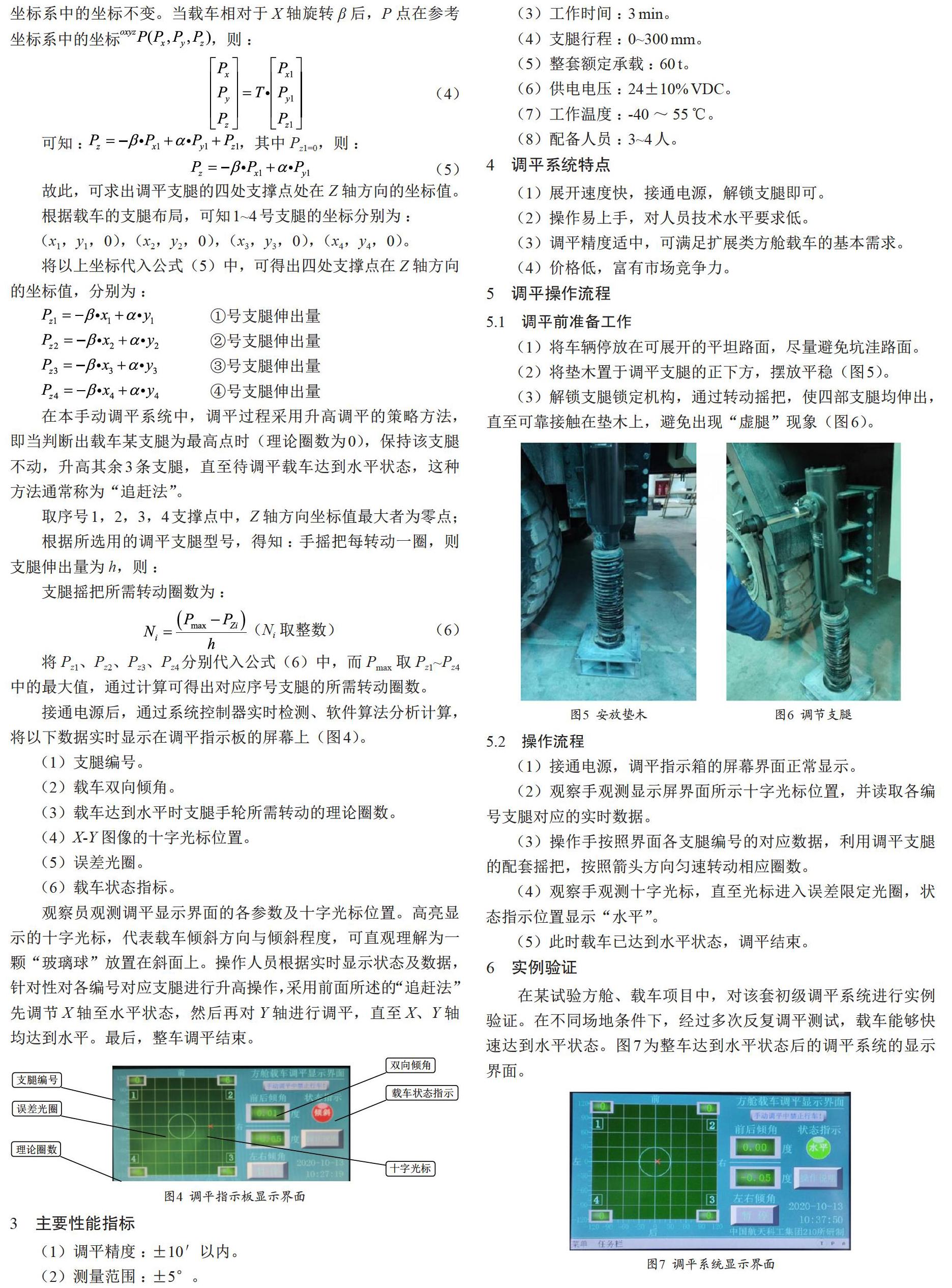
(2)將墊木置于調平支腿的正下方,擺放平穩(圖5)。
(3)解鎖支腿鎖定機構,通過轉動搖把,使四部支腿均伸出,直至可靠接觸在墊木上,避免出現“虛腿”現象(圖6)。
5.2 操作流程
(1)接通電源,調平指示箱的屏幕界面正常顯示。
(2)觀察手觀測顯示屏界面所示十字光標位置,并讀取各編號支腿對應的實時數據。
(3)操作手按照界面各支腿編號的對應數據,利用調平支腿的配套搖把,按照箭頭方向勻速轉動相應圈數。
(4)觀察手觀測十字光標,直至光標進入誤差限定光圈,狀態指示位置顯示“水平”。
(5)此時載車已達到水平狀態,調平結束。
6 實例驗證
在某試驗方艙、載車項目中,對該套初級調平系統進行實例驗證。在不同場地條件下,經過多次反復調平測試,載車能夠快速達到水平狀態。圖7為整車達到水平狀態后的調平系統的顯示界面。
7 結束語
本研究針對某擴展式試驗方艙、載車調平狀態的實際精度及展開機構工作狀態的需求,進行系統性的方案論證。對該方案進行模擬計算分析及經濟性對比,確定該手動初級調平系統滿足當前項目的基礎條件。最后經過系統實物上裝反復調試,調平結果數據符合。
參考文獻
[1] 趙靜一.自行式液壓平板車四點支撐“面追逐式”調平策略的研究與應用[J].機床與液壓,2015,43(15):57-60.
[2] 鄭楊.自動調平系統在車輛底盤上的使用[J].科技博覽,2012,26(3):289.