無人駕駛拖拉機研究國際競爭態勢與研究熱點
2021-09-06 03:42:22袁建霞張秋菊胡小鹿齊江濤吳海華
農業工程 2021年7期
袁建霞,張秋菊,胡小鹿,齊江濤,吳海華
(1.中國科學院科技戰略咨詢研究院,北京 100190; 2.中國農村技術開發中心,北京 100045;3.吉林大學生物與農業工程學院,吉林 長春 130022; 4.中國農業機械化科學研究院,北京 100083)
0 引言
拖拉機作為重要的農業機械之一,是實現各種各樣機械化作業的動力。隨著計算機技術、全球衛星定位技術、地理信息技術的發展及精準農業的興起,國內外許多研究機構開始圍繞無人駕駛拖拉機展開研究工作。1999年,法國雷諾拖拉機公司與法國Cemagref研究中心、法國巴斯卡爾(Pascal)大學電子自動化科研實驗室合作,經過兩年多的研制和試驗,成功研發出首臺基于GPS的無人駕駛農用拖拉機[1]。2016年,我國首臺無人駕駛拖拉機問世,這款東方紅LF954-C型無人駕駛拖拉機采用北斗高精度定位技術,可應用于農田耕整地和植保[2]。無人駕駛拖拉機系統的出現是農業裝備邁向現代化的重要標志,除了引導拖拉機自動轉向,實現復雜環境下與農機具配套的高精度作業之外,還可對田間作業環境進行智能識別,自主決策實現整車控制功能,可實現拖拉機全空間長航時的自動控制[3]。無人駕駛拖拉機可提高農機作業標準,保證作業質量,使農業生產更加高效、智能和精準,增加作業收益,促進農業生產方式的改變,在機械自動化的基礎上進一步降低人力成本并減少環境影響。本文以研究無人駕駛拖拉機的SCI論文為對象,分析了該領域的國際競爭態勢及研究熱點,旨在為相關科技管理部門及時掌握該領域的科技發展態勢和研究重點,優化研究布局和項目管理提供決策支撐。
1 研究數據與方法
以科睿唯安(Clarivate Analytics)科學引文索引(SCI)數據庫的研究論文為數據源,利用“拖拉機”“無人”和“自動駕駛”相關主題詞,以及無人駕駛拖拉機技術體系的關鍵詞構建論文檢索式,檢索發表于2010—2020年的無人駕駛拖拉機研究性論文。然后,以檢索到的論文作為數據集進行國際競爭態勢和研究熱點分析,分析思路和框架如圖1所示。
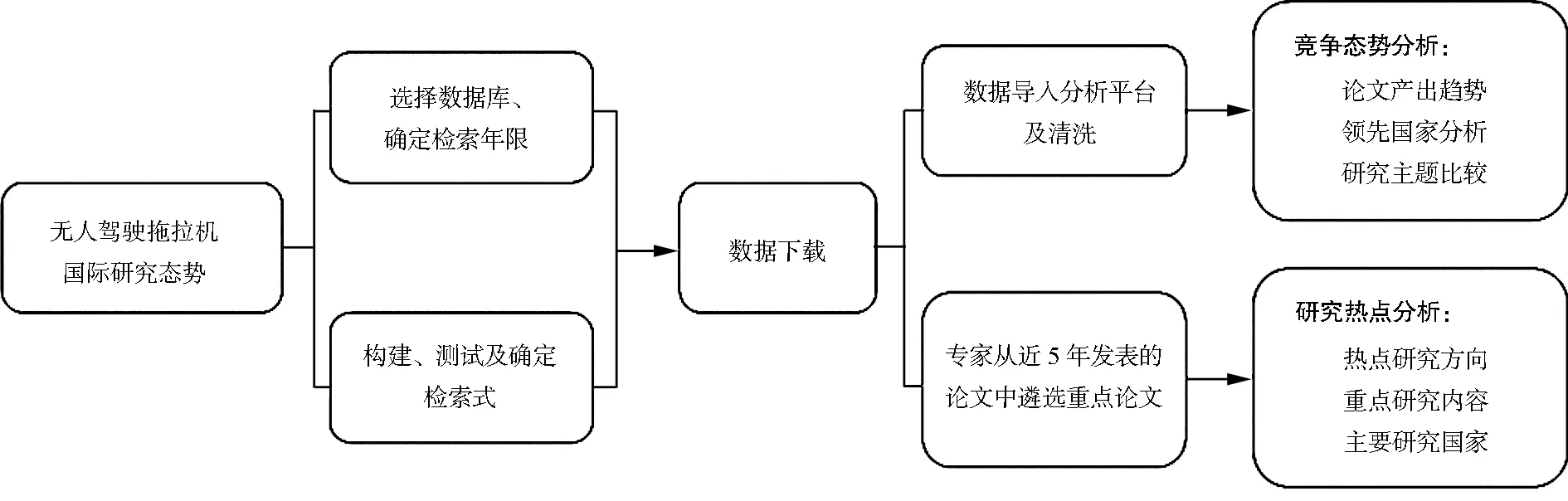
圖1 無人駕駛拖拉機競爭態勢和研究熱點分析框架Fig.1 Analysis framework of unmanned tractor competition situation and research hots
競爭態勢分析以檢索到的全部SCI論文為對象,主要利用文獻計量學方法進行分析。首先,利用科睿唯安的數據分析工具DDA(Derwent Data Analyzer)進行數據清洗,包括國家、關鍵詞等字段的規范和統一。然后,利用該工具對清洗后的標準化數據進行分析,包括論文產出趨勢、領先國家和熱點研究主題比較等,以反映無人駕駛拖拉機的國際競爭態勢。
研究熱點分析以檢索到的近5年(2016—2020年)發表的SCI論文為對象,主要采用論文內容分析法。首先,在上述檢索到的全部SCI論文中選取近5年發表的論文請專家進行甄選,對其中的重點論文逐篇進行內容解讀。然后,在此基礎上根據研究方向進行人工分類,對當前無人駕駛拖拉機的研究熱點方向及其重點研究內容進行分析。
2 國際競爭態勢分析
2010—2020年,共檢索到與無人駕駛拖拉機研究相關的SCI論文321篇(檢索日期是2020年10月),其年度論文數量總體呈逐年穩步上升趨勢,從2010年的11篇增加到近3年的每年40多篇,增長勢頭強勁。近3年的論文數量占比超過了40%,反映出近年來無人駕駛拖拉機研究規模在不斷擴大,處于研究的上升期,越來越受到關注。
2.1 領先國家
2010—2020年,無人駕駛拖拉機SCI論文數量最多的前10個國家依次是中國、美國、西班牙、伊朗、意大利、德國、日本、波蘭、加拿大和韓國(圖2)。10個領先國家中,中國和美國的論文數量最多,分別名列第1位和第2位,均超過了50篇,其中,中國58篇,美國53篇,遠領先于其他國家。其余8個國家的論文數量均低于40篇。
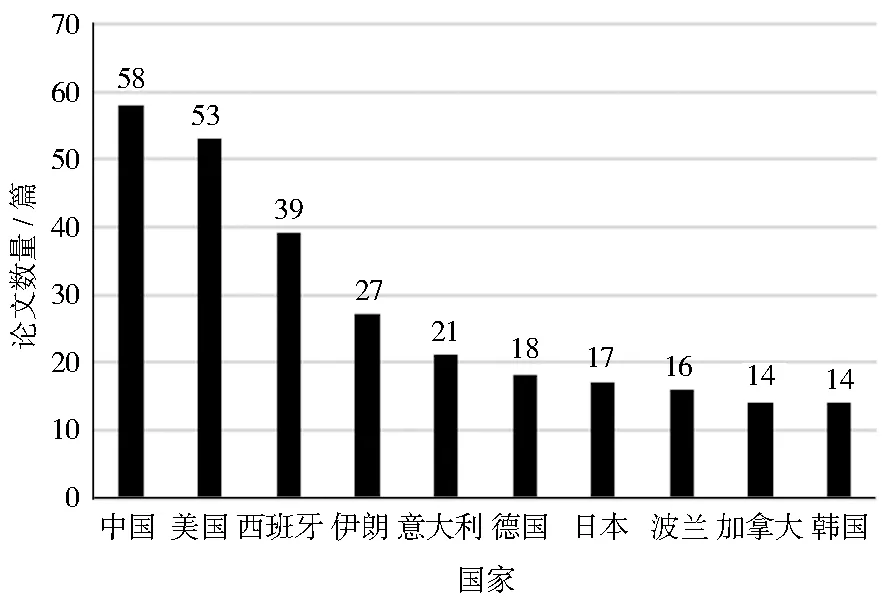
圖2 無人駕駛拖拉機SCI論文數量最多的前10個國家Fig.2 Top 10 countries with the largest number of unmanned tractor research papers
2.2 熱點研究主題
提取10個領先國家SCI論文中出現頻次最高且具有實質意義的前10個關鍵詞,來揭示和反映無人駕駛拖拉機領域的熱點研究主題。10個高頻關鍵詞依次是機器人技術、路徑追蹤、轉向控制、導航控制、拖掛車系統、全球定位系統、燃料效率、模型預測控制、自適應控制及滑模控制。然后,通過分析各領先國家論文中高頻關鍵詞的出現頻次,來比較各國重點關注的熱點研究主題(圖3)。結果顯示,中國比較關注路徑追蹤、轉向控制和導航控制,美國較關注轉向控制、路徑追蹤和全球定位系統,西班牙較關注全球定位系統、機器人技術和導航控制,伊朗較關注路徑追蹤、機器人技術和自適應控制,意大利相對較關注機器人技術,德國較關注機器人技術、導航控制和全球定位系統,日本較關注機器人技術和轉向控制,波蘭較關注路徑追蹤和轉向控制,加拿大較關注機器人技術、路徑追蹤和轉向控制,韓國則對機器人技術、路徑追蹤、轉向控制、導航控制、全球定位系統、自適應控制和滑模控制等熱點研究主題給予同等關注。

注:圖中圓圈的大小表示熱點主題關鍵詞出現頻次的高低,圓圈越大表示出現的頻次越高,反之表示出現的頻次越低,圓圈中的數字是出現頻次。圖3 10個領先國家無人駕駛拖拉機SCI論文熱點研究主題比較Fig.3 Comparison of hot topics of research papers of unmanned tractor from top 10 countries
3 研究熱點分析
從檢索到的321篇無人駕駛拖拉機SCI論文中選擇近5年(2016—2020年)發表的62篇論文,請學科領域專家對論文內容進行分析,從專業的角度遴選出被引頻次5及以上的重點論文36篇進行詳細解讀,揭示無人駕駛拖拉機的研究熱點方向和重點研究內容。分析結果顯示,無人駕駛拖拉機主要聚焦在路徑跟蹤、自主轉向、導航、路徑規劃、避障及變速與穩定性控制6個研究方向(圖4)。其中,研究路徑跟蹤控制的論文數量最多,有13篇,約占重點論文總量的36%。其次是研究自主轉向控制的論文數量,有8篇,約占重點論文總量的22%。排在第三的是研究導航控制的論文數量,有6篇,占比約17%。

圖4 無人駕駛拖拉機重點論文在各熱點研究方向上的分布Fig.4 Distribution of key papers on unmanned tractor research in various research hot directions
3.1 路徑跟蹤控制
路徑跟蹤控制亦稱為軌跡跟蹤控制,是無人駕駛拖拉機系統中的基礎環節,其性能好壞直接影響整個拖拉機是否能夠完成給定的駕駛任務。路徑跟蹤控制的重點是設計出路徑跟蹤控制器,使無人駕駛拖拉機能夠跟隨既定行駛軌跡駕駛[4]。本研究中有13篇重點論文研究路徑跟蹤控制(表1),重點研究內容包括一般路徑跟蹤框架、基于滑模魯棒方法的控制器、線性模型預測控制器、非線性模型預測控制器、多傳感融合控制器、基于比例積分微分(Proportional Integral Derivative,PID)的運動學控制器、變時變狀態反饋控制器、多電平控制器、基于滑動估計的路徑跟蹤算法、動力學建模及基于魯棒軌跡跟蹤誤差模型等。

表1 無人駕駛拖拉機路徑跟蹤控制研究方向論文研究重點
3.2 自主轉向控制
自主轉向是拖拉機實現無人駕駛的關鍵技術之一,涉及自主轉向系統、轉向控制方法等。自主轉向系統按執行機構主要分為電機動力轉向系統和電控液壓轉向系統。轉向控制方法目前的研究熱點是模型控制法、PID控制算法及雙閉環控制法[5]。本研究中有8篇重點論文在研究自主轉向控制(表2)。重點研究內容包括主動側傾控制系統和主動轉向控制系統相結合的新型控制系統、具有低速情況下減少跑偏能力的自動轉向控制器、針對不同工況的路徑和姿態綜合控制策略及控制器、閉環系統非線性立方模型、基于線性二次型調節器理論的轉向控制器、液壓控制系統及衛星制導的轉向模式等。

表2 無人駕駛拖拉機自主轉向控制研究方向論文研究重點
3.3 導航與定位
拖拉機的導航與定位是實現拖拉機無人駕駛的關鍵環節,是保證拖拉機精準轉向的重要基礎[6]。本研究中有6篇重點論文在研究無人駕駛拖拉機的導航與定位(表3)。重點研究內容:基于雙目視覺和三維重建等方法提取田間道路的自主導航線;利用玉米田圖像中綠色像素的累積進行作物曲線行和直線行檢測,以指導拖拉機前進和定點作業;全球定位系統和慣性導航系統的集成系統;用于導航行內種植和在不同地塊間移動的單傳感器導航系統控制算法及雙機導航系統等。

表3 無人駕駛拖拉機導航與定位研究方向論文研究重點
3.4 路徑規劃
作業路徑的離線規劃是自動駕駛系統中的必要組成部分,尤其是轉彎路徑規劃和避障路徑規劃,對于無人駕駛拖拉機正常行駛和牽引機械作業非常重要[7-8]。本研究中有4篇重點論文在研究無人駕駛拖拉機的路徑規劃(表4)。重點研究內容:設計優化程序,為多個拖拉機同時作業提供一種路徑分配方法;多機器人拖拉機系統的空間格局;對拖拉機的運動實行分層規劃;新穎的橫向到側向的三維覆蓋路徑規劃方法,可最小化路徑間的跳躍/重疊區域。
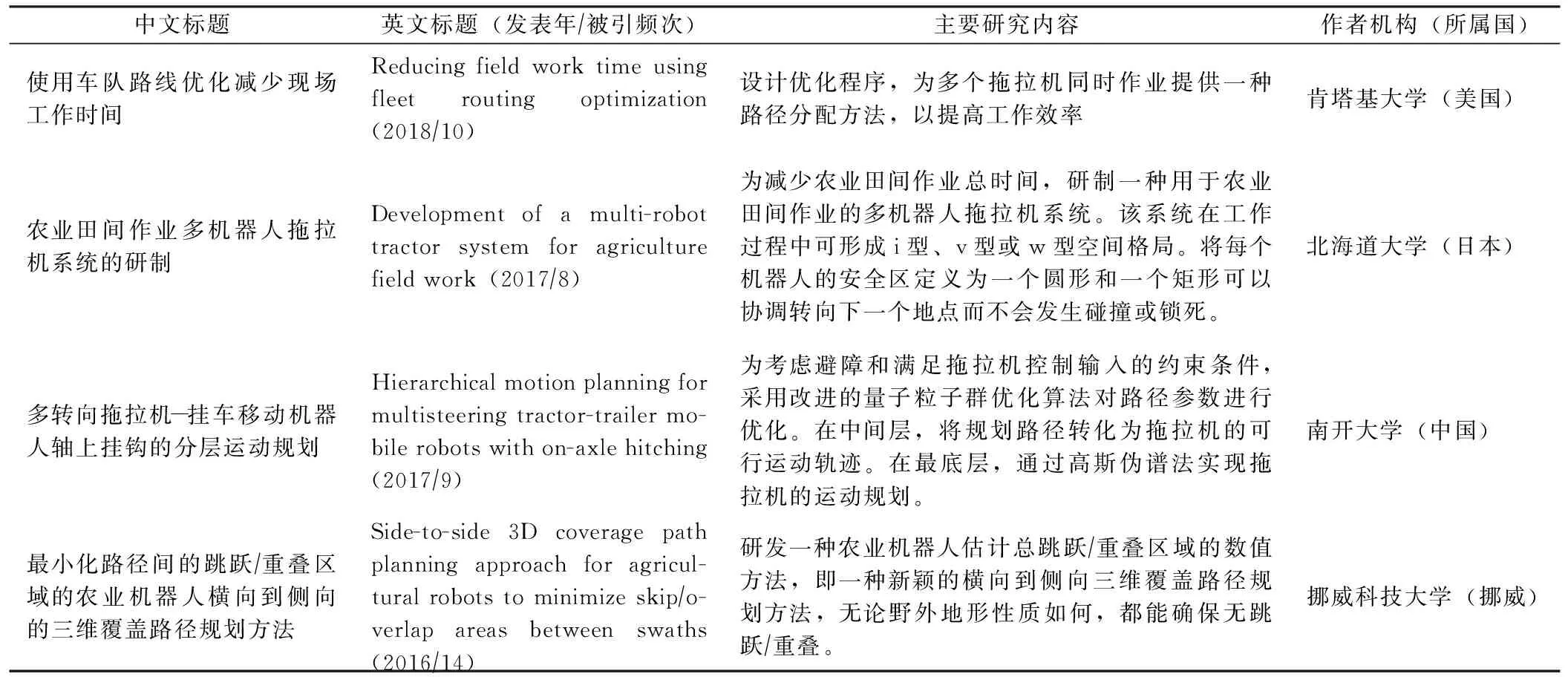
表4 無人駕駛拖拉機路徑規劃研究方向論文研究重點
3.5 避障控制
關于無人駕駛拖拉機的避障問題,利用基于GIS的自動導航越界、陷車預警技術,對于一些固定的、靜態的障礙物可以通過上述的路徑規劃在一定程度上進行解決。另外,還有許多不可預見的、移動的障礙物,以及一些特別的靜態障礙物,都需要設計障礙物檢測和識別系統,進行避障控制[9-10]。本研究中有3篇重點論文在研究無人駕駛拖拉機的避障控制(表5)。重點研究內容:構建農業障礙物檢測數據集;使用安裝在拖拉機前面的單攝像頭人體檢測算法,以識別出行人;一種基于時空分析的農業環境中靜態/動態障礙物自動檢測策略等。
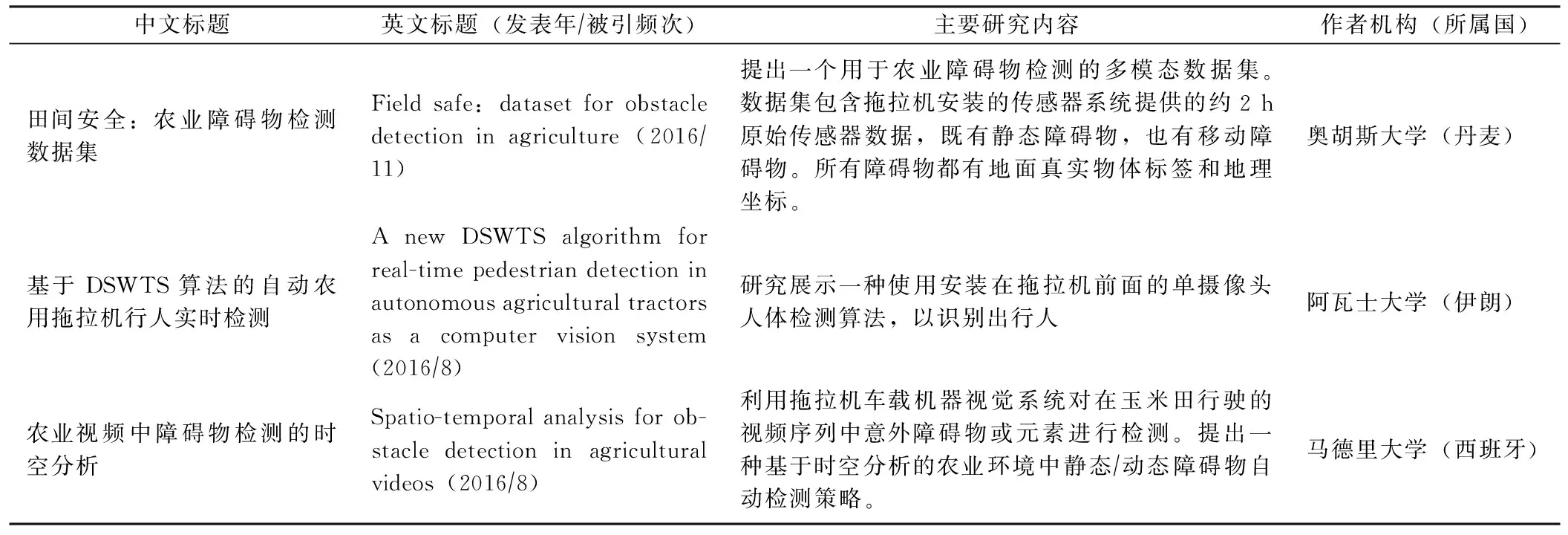
表5 無人駕駛拖拉機避障控制研究方向論文研究重點
3.6 變速與穩定性控制
對于無人駕駛拖拉機而言,為了實現無人化作業需求,變速與穩定性控制系統的設計和應用非常重要,其變速控制過程由控制器發出指令進行自動化控制,主要參考傳感器采集的作業需求信息及作業環境狀況,在進行作業、自由行走和轉彎時,執行相應的變速過程并保持穩定。本研究中有2篇重點論文在研究無人駕駛拖拉機的變速與穩定性控制(表6)。其中一篇提出一種新型的液力粘性傳動動力換擋變速器,可以使拖拉機實現無級調速爬行,實現小沖動、高舒適性的“軟啟動”。另一篇提出一種基于時變反饋的輪式牽引-掛車機器人控制方法,以穩定輪式拖拉機-掛車機器人在原點附近的位置。

表6 無人駕駛拖拉機變速與穩定性控制研究方向論文研究重點
4 結論
一是無人駕駛拖拉機關鍵技術的熟化和創新研究是熱點。針對導航與定位、自動轉向、路徑跟蹤、路徑規劃、自動變速、主動制動、避障、地形補償等幾項關鍵技術的進一步熟化研究及創新研究仍是無人駕駛拖拉機近幾年的研究熱點,通過融合新技術、新方法等,提高其作業精度、作業效率、作業穩定性及適用性,為最終實現將理論研究應用并服務于實際生產打下堅實基礎。
二是無人駕駛拖拉機大型化與小型化發展兼顧。目前世界范圍內,農用無人駕駛載具機器人研究項目主要集中在對小型機器人和中小型拖拉機的研發,但大型拖拉機還有10~20年的用武之地和生存空間,仍將在農作物耕種和收獲中起主要牽引作用。機械小型化由于有很多優勢,如適合在果園和葡萄園等特殊環境運行,可減少對環境的影響等,也是未來無人駕駛拖拉機的發展趨勢。此外,小型化后可以由一輛拖掛車搭載多臺機器人,形成“可移動農業機器人群”,實現聯合協同作業。
三是無人駕駛拖拉機可靠性與安全性研究將加強。凱斯紐荷蘭CNH將農機自動駕駛分為5級:L1級導航(Guidance)、L2級協調與優化(Coordination & Optimization)、L3級輔助駕駛(Operator Assisted Autonomy)、L4級有監督的自動駕駛(Supervised Autonomy)、L5級全自動駕駛(Full Autonomy)。國內“無人駕駛拖拉機”一般是指L4級,即有監督的自動駕駛,需要駕駛員在車上監管安全。未來5~10年可以達到L4級。要真正做到L5級無人駕駛拖拉機,需要攻克的首要課題是作業可靠性和安全性問題。傳感器模式、傳感器融合、信號處理與人工智能之間的相互作用研究,智能和認知能力的無人駕駛拖拉機研究,對保障作業質量和作業安全具有重要意義。
四是無人駕駛拖拉機在5G環境下將實現多機具協同管理。5G網絡技術具有高穩定性能、高傳輸速率、低延時及網絡架構靈活的特點,基于5G網絡技術可以使車聯網通信系統結構更加智能和靈活,系統元素也變得更加多樣化,可為無人駕駛拖拉機作業過程中實現田間多機具協同作業管理、作業工況實時監控與報告、作業機具間信息交互及決策和高精度導航等方面提供技術支持。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
故事大王(2016年7期)2016-09-22 17:30:08