大型浮吊無動力船舶拖帶與靠泊洋浦港探討
2021-09-08 16:18:58林山符冠勇逄啟忠
中國水運 2021年8期
林山 符冠勇 逄啟忠
摘 要:本文探討了大型浮吊無動力船舶拖帶與靠泊洋浦港的生產方案。首先介紹了大型浮吊無動力船舶的特點及引航現狀,其次介紹了引航中的船舶資料、協助作業拖輪配備情況、洋浦港的潮汐、氣象及航道情況,既而分析了無動力船的引航要點,最后給出了大型浮吊無動力船舶拖帶和靠泊經驗總結。
關鍵詞:大型浮吊;無動力船舶;拖帶;靠泊
船舶海上運輸是大宗商品貨物的主要運輸方式。隨著經濟的快速發展和船舶建造技術的日新月異,船舶不斷向著智能化、高速化、大型化發展[1-2]。大型浮吊無動力船舶的靠離泊操縱是一個復雜的過程,也是決定船舶安全與否的一個重要環節。近年來, 進靠洋浦港大型浮吊無動力船舶靠離泊日趨頻繁,對此類船舶的操縱對一線引航員提出了進一步的挑戰與要求[3-4]。隨著海南自貿港進程的大力推進,未來此類船舶進靠洋浦港的機會也將會增多。大型浮吊無動力船舶在操縱上比較特殊,按照常規做法進行靠離泊操作具備一定的風險[5-6]。因此,全面提升引航服務水平,為海南自貿港建設保駕護航,是每位引航員刻不容緩的職責。本文通過介紹大型浮吊無動力船舶拖帶與靠泊洋浦港的操縱方法,分析無動力船的操縱特點,總結大型浮吊無動力船舶拖帶和靠泊要素,以期能夠進一步指導港口引航生產實踐。
1大型浮吊無動力船舶的特點及引航現狀
大型浮吊無動力船舶,該類型船舶形狀為方駁型,航向穩定性很差,上層建筑高,受風流影響大,駕駛臺瞭望盲區大,加上洋浦港航道彎度大,航道狹窄,漁船眾多,通航條件不理想,給船舶操縱帶來極大的困難。大型浮吊無動力船舶和主機失控船舶有所不同,沒有動力是已知的,而主機失控是突發的,緊急的,所以無動力船舶可以有足夠時間做準備,可以制定詳細的引航方案,配備足夠功率的拖船,選擇合適的天氣和潮汐,安排巡邏和清理航道,選擇勝任的引航員等;大型浮吊無動力船舶考驗的是引航員完全利用外力對這個漂浮體的控制能力[7-8]。
引航實例:2017年11月07日1330大型浮吊無動力船舶“宇航起重58”從洋浦港錨地13#起錨拖帶進靠洋浦港5#泊位,左舷靠泊。
2船舶資料
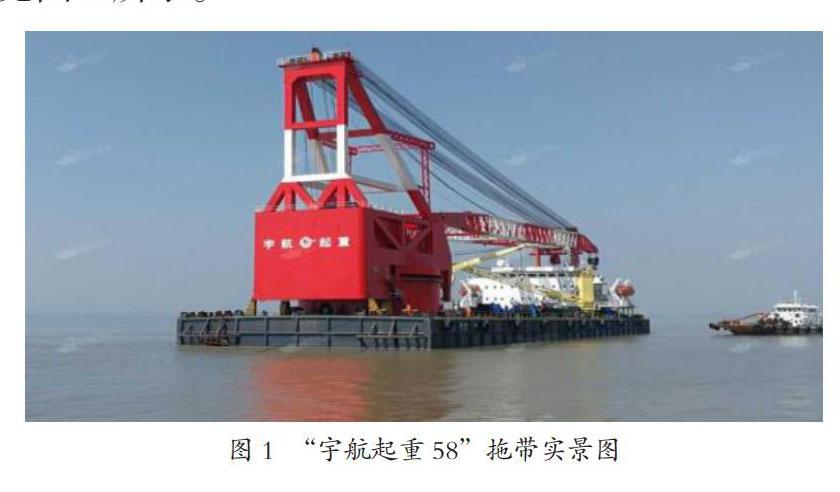
船名“宇航起重58”(無動力),LOA=145米,B=45米,da=6.5米,GT=21719,上層建筑高達30m,參見圖1所示。
3協助作業拖輪
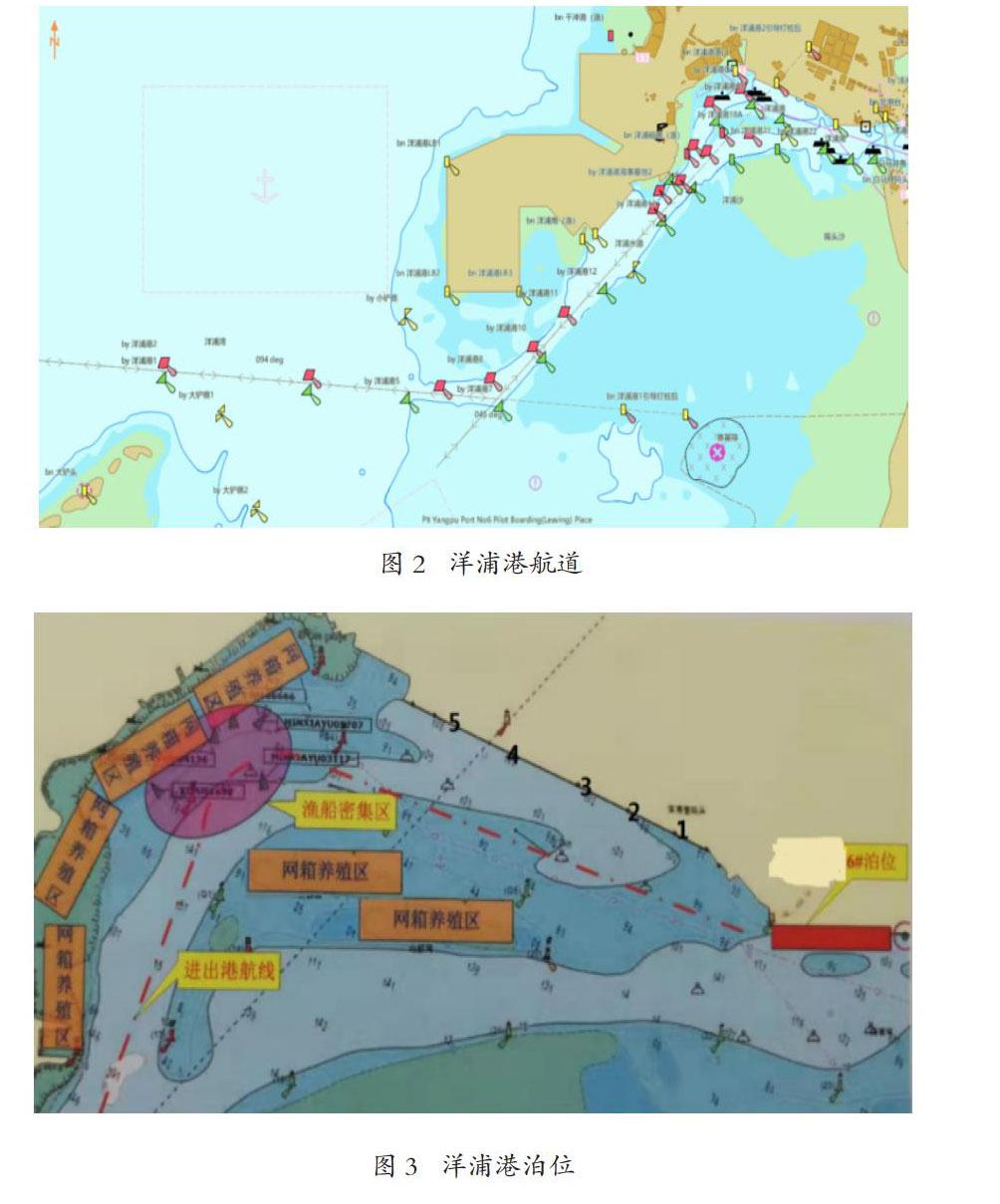
從13#錨地登輪點至洋浦5#泊位4.2n mile,小鏟灘航段水深13.5m,洋浦港航段水深8.8m,最窄處航道寬度為120m,17#~21#浮航段灣道曲度較大,轉向幅度達50°以上,此航段邊界附近兩側均有漁排及拋錨漁船,穿越航道的漁船較多,且雜亂無章,給進出港船舶帶來極大的不便。
7大型浮吊無動力船的引航要點
7.1引航前準備
航前會同工程港方、港作拖輪船長、拖帶方、被拖帶船船長、代理、引航員,確定靠泊時間,拖輪數量,帶纜位置,以及引航員的操作方案等。
7.2選擇合適的時機
根據被引航船的主要尺寸長度、噸位大小、吃水等因素,選擇合適的引航時間和時機,包括白天還是晚上,潮汐、潮流情況,風力,能見度情況。
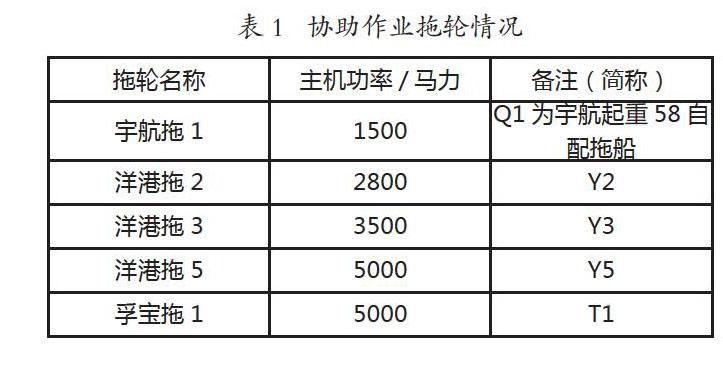
7.3合理搭配拖輪
共5艘拖輪,有4艘拖輪參與作業,左前、右前分別為“洋港拖3”和“洋港拖2”,船首正前方為“宇航拖1“,船尾為”洋港拖5“,拖輪全部帶纜,船首拖輪為順拖,船尾正中拖輪為頂推,同時小范圍調整頂推方向起到舵的作用;另外一艘“孚寶拖1”作為機動護航清理影響本拖帶作業的航道漁船,直到靠泊時帶纜協助靠泊之用。
7.4引航員的站位
由于該浮吊船的浮吊基座以及浮吊的布局所限,駕駛臺的瞭望視線受到嚴重的遮擋,在駕駛室內無法看到整個浮吊船的全貌,從而對浮吊船的運動態勢的判斷受到很大的影響,所以選擇兩個或更多的站位點。站位點選在較高處的駕駛臺兩翼,主領在視野開闊的高處,另指派一名引航員持對講機在船首協助瞭望,其他引航員分散在各注意節點上,如平臺的舷側或角上,與主引航員相呼應,判斷距離、速度、通過浮筒的情況等為其提供參考。
7.5航道中拖船的使用配置
航道中拖船的使用配置,參見圖4所示。
7.6航道引航操縱要點
(1)浮吊船起錨后,Q1起拖,Y5頂推,逐步加力向航道行駛,根據進港航線令Y5全速頂推船尾正中間,同時小范圍調整頂推方向起到舵的作用,Q1主要沿航道中心線方向拖帶前進,同時小范圍調整向左或向右拖帶方向起到船首航向的改變;落水頂流及左舷受風,被拖帶浮吊船航速4kn左右。
(2)抵航道彎道時,即17#~21#浮,流壓向凹岸一側,及時使用Y2和Y3的推力或拉力來控制被拖船的船位。
(3)接近泊位前沿300m時,通過船尾拖輪Y5向船尾正后方向拖拉控制船速在1kn以下;然后再根據靠泊需要,拖輪帶纜位置做出適當的調整,拖輪Y5解纜改帶纜在右舷船尾,機動的F1帶纜在右舷船首,Y3帶右舷船尾,參見圖5所示。
(4)進入泊區,Y5沿船尾方向放纜起拖把船停穩,Y2和Y3垂直靠上隨時做好頂推的準備,F1和Y5垂直放纜隨時做好拖拉的準備,運用前后拖輪平穩地把浮吊船平行靠上碼頭。
8大型浮吊無動力船舶拖帶和靠泊經驗總結
(1)因平臺式浮吊船型,加上風影響明顯,航向穩定較差,故要隨時及早地調整拖輪的拖帶方向和頂推方向。
航道彎道曲度大,轉向幅度較大,航道邊界附近漁排較多,過往穿越漁船較多,且不守規矩,護航船應及時警告清理航道,且流壓較明顯,此航段是操縱的一個難點,故應擺好船位在上風上流處,及早協調發揮拖輪的作用。
(2)引領此類船舶時,切記做好:①前期工作準備充分,引航方案合理周全;②水文氣象條件理想,進港時機適宜;③各方配合默契;④引航員操縱平穩從容。
9結語
大型浮吊無動力船舶進靠洋浦港雖然沒有常態化,但作為特殊船舶和特殊的引航,進靠洋浦港有相當的難度,需要駕引人員有豐富的專業理論支撐,積累一定的實踐經驗。本文介紹了大型浮吊無動力船舶拖帶與靠泊洋浦港的典型案列,將無動力船的操縱特點與引航要點相結合,結合生產實際,總結大型浮吊無動力船舶拖帶和靠泊要素,希望能夠進一步指導港口引航生產,提供有力的理論保障。
參考文獻:
[1]沈灝.拖帶大型重載無動力船舶進上海港的論證和實操[J].船舶物資與市場,2020(06):92-94.
[2]王崇元.拖帶無動力船舶時拖船的使用和注意事項[J].航海,2020(03):65-68.
[3]趙斌.大型無動力船舶的拖帶出港引航方案及應急措施[J].航海技術,2019(05):47-49.
[4]周海鵬,楊玉滿. 無動力船舶在寧波舟山港的拖帶[A]. 中國引航協會、中國航海學會引航專業委員會.中國引航論文集 2017[C].{4}:上海浦江教育出版社有限公司,2018:7.
[5]王為.無動力船舶出廣州港的拖帶方法和注意事項[J].中國水運(下半月),2017,17(12):10-11.
[6]李娜,黃木檀.超大型重載無動力船舶拖航進廣州港通航安全[J].航海技術,2017(01):26-29.
[7]陳喜亮,楊光.大型重載無動力船舶進連云港的拖帶方法和注意事項[J].航海,2012(03):46-48.
[8]張青深.無動力或舵設備故障船舶在港內的拖帶作業分析[J].河南科技,2014(22):86.
[9] 蔡泓,胡甚平.青島港船舶引航技術[M].上海浦江教育出版社, 2018,219-230.