變可穿戴式手腕輔助恢復機器人設計與控制研究
2021-09-10 13:39:31張軍正康存峰韋長海
智能建筑與工程機械 2021年4期
張軍正 康存峰 韋長海






摘? 要:隨著時代的發展,人們的物質生活得到了極大改善,各種運動成為人們生活中不可或缺的一部分,但運動的同時總是伴隨著一定的風險性,因為運動而受傷的人每年都呈現出遞增的趨勢。經過調查發現,在眾多的康復儀器中,對于手腕的康復儀器還沒有過多研究,這導致了目前生活中,人們依舊在大部分時間使用繃帶夾板或者石膏固定等方式來進行恢復,這些傳統的方式有著恢復周期慢,拆卸困難,更換復雜等問題。目前已研究出的腕部康復儀器,大多是大中型儀器,不能攜帶,無法起到實時保護作用,也無法很好的應用到日常之中。基于此,本文提出一種結合傳統綁帶夾板與現代傳動以及柔性定位的輔助手腕部可穿戴式的周期恢復機器人。
關鍵詞:可穿戴;手腕輔助恢復機器人;設計與控制研究
中圖分類號:TP242.3?????????? 文獻標識碼:A????? 文章編號:2096-6903(2021)04-0000-00
隨著時代的發展,醫療有了長足的發展,科學家們根據人體的各種病癥,發明出了許許多多的醫療恢復器械,這對眾多病癥起到了十分有效的治療效果,然而經過實際調查發現在眾多醫療器械中,對于骨折方面的開發研究還不夠豐富,其中就沒有確切的應用于手腕部骨折扭傷的恢復器械儀器。
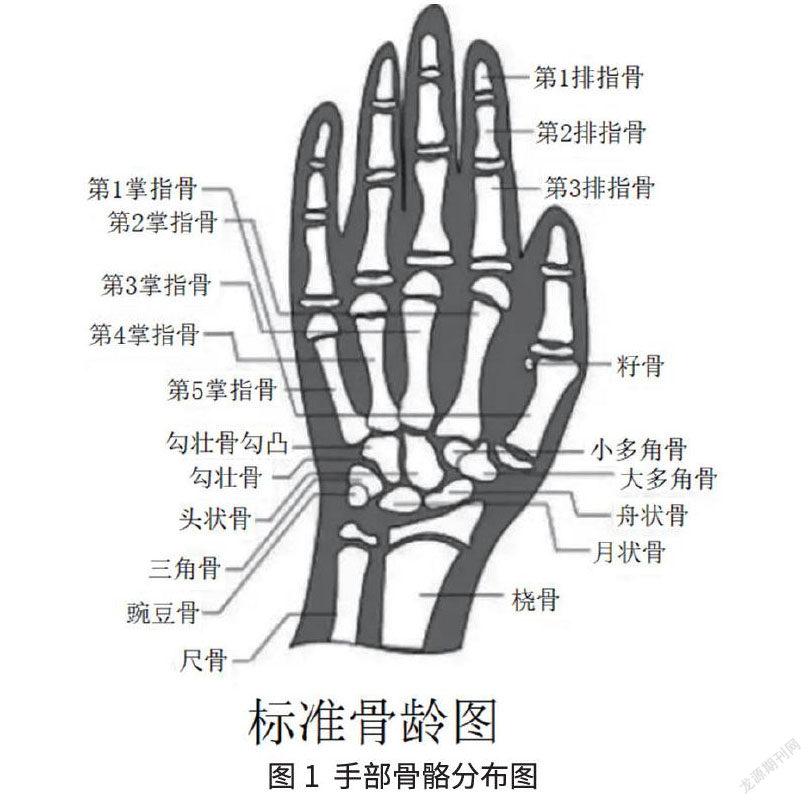
經過分析手腕部骨骼分布圖,見圖1,可以發現手腕部為骨骼密集區,這些骨頭分布緊密,也較為脆弱,在受到強沖擊或者重壓之時容易發生脫臼、扭傷、骨折甚至是骨裂,由于手腕部為經常活動關節,所以恢復周期長、完全恢復難度大。基于此,手腕康復方面的機器人把研究方向定為便于穿戴與攜帶,便于調整的輔助手腕恢復的周期性治療機器人,其意在于去輔助治療由于摔傷、撐地、重壓等原因所引起對的手腕處像舟狀骨等附近的骨折,通過機器人的結構運動逐步調整角度位置,輔助并加快骨折的康復,同時進行固定,進一步去防止意外而導致的二次受傷情況,并且同時附有固定式治療儀理療的功效,從而加強手腕柔韌性與骨骼強度,起到預防保護效果,實現對于手腕部的全方位保護治療。
本研究創新性的提出了一種整體式的氣動柔性管機構,并利用氣動柔性管作為主要的彎曲方式,通過氣動三元件來對氣動柔性管進行加壓,從而改變形狀。同時本研究根據機械原理的方式設計了機械外骨骼形狀,對于手部進行了全方位的保護與包裹,采用齒輪傳動與連桿傳動等方式實現手指部與手腕部的運動,從而加強防護性與機動靈活性[1]。
1 手腕輔助恢復機器人的外骨骼設計
1.1 腕關節運動形式與運動范圍分析
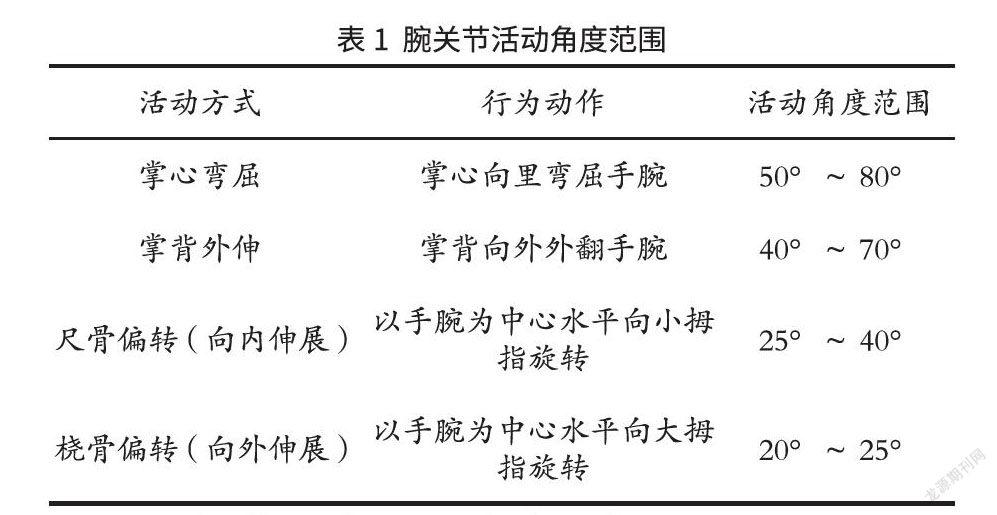
根據腕關節結構可以發現,腕關節整體上屬于典型的橢圓關節,分別由以上三種關節構成了上下兩種橢圓形的關節面,腕部也是在這上下兩個橢圓形的關節面的基礎上,可以靈活的做到向前或向后的屈伸運動和左旋或右旋的伸展運動。由于腕骨之間連接性與側韌帶較為堅韌的緣故,導致手腕在做伸運動時受到一定限制,伸運動的運動方式沒有曲運動的運動方式幅度大。后文中手腕活動范圍角度,見表1,依據手掌朝下,手與前臂伸直成一條直線時開始認為為0°。
腕部的每一個骨骼都有自己的意義和作用,任何一個腕部骨骼出現損傷都會導致腕部運動受到巨大影響。因此當腕部受到首次傷害以后,合理控制腕部的運動范圍,從而避免腕部受到二次傷害,同時還要保證康復過程中的合理活動狀態,不同的骨骼受傷后的骨骼恢復周期,根據恢復周期與恢復狀態適當擴大或改變腕部活動范圍,從而加強腕部的自主恢復能力[2]。
1.2 腕關節傷后護理與二次受傷保護
腕部輔助恢復機器人最重要的是在最大程度上保證腕關節處傷后護理的安全性。在受傷初期,手要與手腕以及小臂始終保持水平0°的狀態,見圖2,這樣在保證血液流通順暢的前提下,保證初期腕部骨折部位骨骼良好定型。因此需要延長外骨骼的腕部下端板面長度,在下端板面引出吊帶,吊帶可掛在脖子上,以此來減輕抬手臂的壓力,并保證手與腕部的水平。
腕部輔助恢復機器人另一重要作用是避免二次受傷,一是腕部活動范圍大,導致恢復周期變長,恢復效果變差,面對這種情況就要始終良好的把握住手掌部分上夾板與下夾板的位置,上下夾板的位置控制需要通過氣動柔性管進行合理把控,通過氣動柔性管的壓差變化來控制上下夾板的位置,改變手掌部與腕部的角度位置以及活動范圍。二是外力在此沖擊手腕部分所導致的腕部二次受傷,因此為避免這種情況發生,將手腕部由上下夾板的結構創新性的改為,橢圓環形全包裹式一體結構,利用橢圓形抗沖擊,分散局部力的作用效果,可能保證手腕部能更好的避免沖擊而帶來的二次受傷。三是要盡量避免因手指部分戳傷,而導致的連帶性腕部損傷,因此外骨骼結構設計將全方位的對手指進行包裹性保護,采用3D打印技術為每個手指制作指套,每根手指關節都將采用連桿進行輔助連接,來保證手指抗沖擊能力。四是要避免寒冷天氣所帶來的骨骼疼痛的癥狀,因此在手腕部分將搭載電極板來進行加熱,保證手腕部分的血液流通以及腕部溫度。
1.3 外骨骼自由度分析
外骨骼由9個球面副和3個球銷副組成,由彈簧k1連接g1桿與g2桿,經過實際分析可以發現彈簧k1為系統提供一個自由度,通過機構簡圖,見圖3,可以發現在圖中總共存在11根桿,同時包含有16個轉動低副,經過自由度的計算可以得到,外骨骼的整體自由度數量為2,由于外骨骼實際應用時,轉動副1與轉動副13會被氣動柔性管所固定,彈簧k1被手掌厚度所決定,因此可以進一步對轉動副1與13以及彈簧進行等效,得到新的機構簡圖,見圖4。
根據圖4的外骨骼簡化機構簡圖,可以進一步計算自由度為4,在實際穿戴過程中,手指部分的三個指節都可以主動彎曲,因此可以得到在機構簡圖中有三個主動件,由于主動件數量小于簡圖的自由度數量,因此機構的運動不確定,可以在平面內任意運動[3]。
1.4 外骨骼力學分析
1.4.1 宏觀力學分析
由于外骨骼的主要目的是要保證手腕部不會受到傷害,創新性的將腕部外骨骼設計成橢圓形的拱形形狀,利用拱形原理,來盡可能的分散力的作用,從而起到減小沖擊的目的。拱形原理是在拱形承受壓力時,能把壓力向下向外傳遞給相鄰的部分,使受到的力分給不同的受力點,因此比起單面受力形狀的物體來說,拱形能承受的力更大。
利用拱橋式的以拱肋為主要承重構件,其受力特點是拱肋承受壓力、支承處承受水平推力。拱橋式的最大的結構特點是當受到豎向壓力的作用下,常見的直梁下側受拉,上側受壓,根據材料的特性,由于外骨骼將采用3D打印技術,因此所選用材料為plv塑料,抗拉性能遠遠低于抗壓性能,若將矩形直梁改為拱形之后,外骨骼上面的荷載通過拱圈傳遞推力給拱座,拱座將被設計為承重支撐物,因此兩側邊的拱座加厚來承受拱圈傳遞的推力。這樣的結構可大大減小構件下側的拉應力,甚至使得構件內不出現拉應力,能更加良好的保證外骨骼的受壓承重能力,提高了結構的承載能力,從而進一步避免腕部的二次受傷。根據拱形原理設計出了腕部外骨骼形狀,見圖5。
1.4.2 微觀力學分析
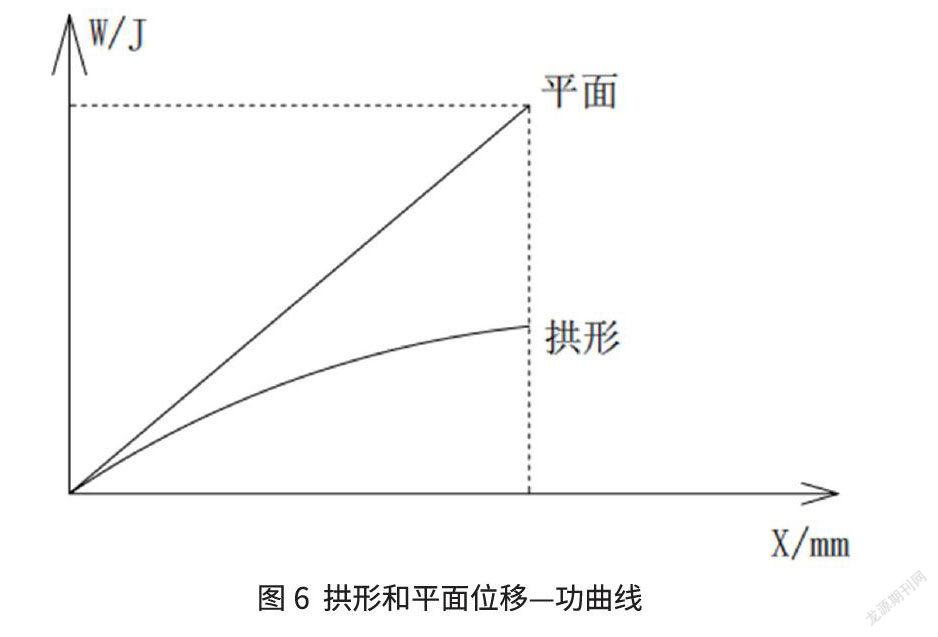
外骨骼的拱形結構采用的是半橢圓凸弧,通過拱形與平面力的作用效果的力-位移曲線圖可以發現(見圖6)。當水平位移相同時,兩者同時豎直方向上的速度為0時,根據微積分原理,拱形所產生的功會更少,因此所產生的平均作用力也就更小,因此拱形相較于平面在整個沖擊過程中所受到的平均壓力也會更小,因此拱形更適合于作為外骨骼的形狀,從而來避免二次受傷[4]。
1.5 腕關節輔助恢復機器人外骨骼建模
為了保證恢復和保護效果,概念性的提出了手部以及腕部的全方位包裹式的外骨骼設計思路,為使手指部分可以靈活轉動,在手指節連接處采用45#號鋼材的M4的螺釘進行連接,利用銷固定好指節之后,為防止指節的過度彎曲所帶來的手腕的牽扯疼痛,設計了連桿裝置,連接于每個指節之間,起到指節與指節之間彎曲時的交互,并避免了指節彎曲過度對手腕的傷害[5],見圖7。
為保證腕部具有一定的活動范圍,因此需要通過下側的氣動柔性管來控制彎曲程度,通過上方氣動柔性管來控制上下夾板之間的大小,控制手腕及手掌的活動范圍。同時在手腕部與手掌部之間通過齒輪傳動的方式進行連接,手腕部前端被設計成一種1/4齒輪,在手掌上端設置有一個全齒輪,當氣動柔性管彎曲時會帶動手腕部1/4齒輪旋轉,進一步帶動手掌上面的齒輪旋轉,由于設有氣動柔性管,因此上方的氣動柔性管起到了使得腕部與掌部齒輪傳動自鎖的效果,使得齒輪之間嚙合嚴密,不會松動,避免造成對手腕的裹夾性不足而帶來的不良后果。
2 氣動柔性管的使用與搭建
2.1 氣動柔性管工作原理
氣動柔性管采用長方體的設計結構,中間采用空腔的設計原理,利用上下兩側的管層壁厚不同來實現氣動彎曲的目的。氣動柔性管通過采用軟橡膠為材質制作而成,氣動柔性管的空腔,充當氣囊的作用,通過氣動三元件向內沖壓把氣體壓入空腔之內,改變空腔內的壓強,由于上下側的管層壁厚的不同,使得隨著氣體的充入,空腔內壓強的增加,管層薄壁層的彎曲形變量會大于管層厚壁層的彎曲形變量,從而進一步使得氣動柔性管向管層厚的一方彎曲。
2.2 氣動柔性管的設計
根據需求手掌下夾板端與腕關節連接的氣動柔性管需要從手腕部分一直延伸到手掌部分,經過測算氣動柔性管的長度為150mm,由于需要氣壓的精準控制,因此需要避免因氣壓的小幅度變化所引起的,氣動柔性管彎度的較大幅度改變。由此上下側的壁厚均不能設計太薄,同是上下側的壁厚差距應稍大一些,因此把上壁厚設為2mm,下壁厚設為9mm。放置于手掌部和手腕部下方的氣動柔性管,因為要承擔支撐以及穩定的作用,因此采用整體式的設計思路,設計成扁長形的長方體形狀,從橫截面來看,寬度為50mm,高度為25mm,兩側的壁厚為4mm。
根據需求,由于手掌上夾板與腕關節之間存在齒輪連接,因此手掌上夾板與腕關節連接的氣動柔性管需要避開齒輪連接的地方,故采用兩根氣動柔性管,分列與齒輪的左右兩側,由于上側的氣動柔性管的作用是控制手掌的整體活動區間,因此上側的兩根氣動柔性管需要完全一樣,才能保證上夾板的左右平行與活動空間的穩定均衡。因為氣動柔性管處在上側,因此根據扇形的結構特點,上側的氣動柔性管要比下側的氣動柔性管要長,因此取長度為160mm的兩根氣動柔性管。同下側的氣動柔性管設計結構一樣,由于上側的氣動柔性管也是下彎曲,因此氣動柔性管從橫截面來看時的上壁厚度要小于下壁厚度,左右兩邊的壁厚要相等,因此上壁厚去2mm,下壁厚取8mm,左右兩端壁厚取4mm,從橫截面來看,寬度為20mm,高度為20mm。
利用3D打印技術設計出氣動柔性管的兩種模具,向兩模具中分別注入硅橡膠液體等待冷卻,冷卻后取出澆筑出來的3根氣動柔性管,完成氣動柔性管設計制作。
2.3 氣動柔性管的測試
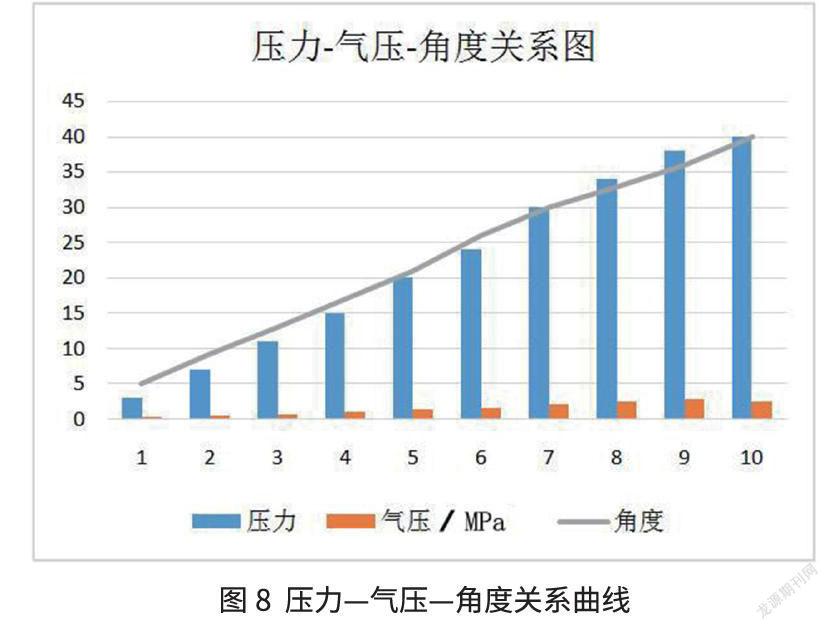
由于氣動柔性管在外骨骼的設計中主要作為一種驅動力使得手掌部分的上下夾板發生彎曲,因此需要測量出當施加不同的壓強時氣動柔性管彎曲所帶來的壓力的大小,因此根據需求設計了一款壓力傳感器檢測裝置,利用壓力傳感器來檢測隨著氣體的充入氣動柔性管產生彎曲所帶來的壓力大小。在使用過程中,先把氣動柔性管裝入壓力傳感器裝置中,厚壁一側貼緊壓力傳感器一側,向氣動柔性管內部充壓,由于氣動柔性管的上下兩壁厚的不同,導致氣動柔性管有了一個向壓力傳感器一端彎曲的趨勢,隨著氣壓的逐漸增大,會給壓力傳感器一個逐漸增大的壓力,根據壓力傳感器測出的壓力與加入氣動柔性管內部的氣壓,可以得到壓力-氣壓-角度關系曲線,見圖8。
2.4 氣動柔性管的密封
氣動柔性管在充進去氣體以后就會與氣動三元件分開,為保證氣動柔性管內的壓強一定且不會發生漏氣等現象,因此需要對氣動柔性管進行密封,而由于氣動柔性管并不是一次性使用品,所以要采用可反復充氣放氣的結構來對氣動柔性管進行密封,因此聯系到自行車輪胎的結構,決定采用氣門嘴來進行密封,通過氣門嘴來控制管內的氣壓變化。在氣動柔性管中氣門嘴的作用是作為充氣的接口及放氣的閥門,并保持所充空氣不會外泄,并采用的是銅制的氣門嘴,氣門嘴主體裝有像單向閥一樣工作的氣門芯,壓縮空氣能充入內胎里而不能自由漏氣,來保證氣動柔性管的功能。
3 理療機構的搭載使用
3.1 電熱片的選擇
為避免因低溫而導致的血液流通不暢與骨骼隱痛問題,將采用電熱片的方式來使得腕部的溫度維持在一個溫暖的溫度之下,保證血液的流通,保證腕部恢復周期的穩定,從而起到穩定的輔助保護作用。通過查閱各種電熱片的工作原理與使用參數,最終只有石墨烯電熱片與碳纖維電熱片能很好地滿足需求。經過進一步對比碳纖維的電熱板在經濟層面更好,同時碳纖維電熱板還附帶合理波長的紅外線可以對手部起到更好的促進血液流通、緩解局部鎮痛、減輕手腕部疲乏感的作用,因此最終選用了碳纖維電熱板。
3.2 碳纖維電熱板的制熱原理與優點
碳纖維電熱板采用的是非金屬的碳纖維發熱材料,與高強度絕緣材料經高溫高壓密閉復合而成一種加熱器件,通過連接電源以后開始產生熱量。在施加電壓之后碳纖維中的微晶體會在電場作用下,產生大量的碳晶分子團,并且這些大量的碳分子團將迅速產生“布朗運動”,實現了把“電能向熱能”的轉換。碳纖維晶體板的表面與緊貼碳晶板的其他物體或空氣形成溫差,并根據熱傳遞規律——熱量的傳遞方向永遠是由高溫體向低溫體的方向傳導。因此,碳纖維產生的熱量會向周圍的物體或空氣傳遞,從而提高環境溫度。由此使得碳纖維板在充電以后具有了加熱的功效。
同時由于碳纖維板的特殊結構特性,導致碳纖維板在通電之后,在電場的作用下,碳晶分子團會產生大量波長在8~15um的遠紅外線。遠紅外線如同太陽光線的輻射能,極易被人體或物體吸收,使體溫迅速升高。并且由于電熱板所產生的紅外波長在5~15µm之間,這種紅外線波長是人體最匹配的紅外波段,故被醫學界譽為能夠治愈疾病的“生命之光”,這種波段的紅外線可以激活人體細胞組織,并與人體細胞組織形成共振吸收,促進機體新陳代謝,有明顯的理療功效。這種有碳纖維板形成的紅外線,正適合與應用到手腕康復之上,既可以增強手腕部的熱量,使得血液流通更加通暢,又可以促進新陳代謝,縮短腕部恢復周期紅外線,增強骨骼強度。
3.3 電療脈沖按摩片的搭載
電療脈沖按摩片,采用的是低頻電流引起的肌肉的收縮或放松,這種低頻電流又被稱為電療式按摩,在醫學上被叫作無針針灸。利用肌肉的泵作用的原理來進行按摩放松,當有低頻電流時,這時肌肉將處于收縮狀態,會將含有代謝物的血液輸送出,當低頻電流減弱時肌肉開始放松,此時血液開始大幅度輸入,通過這樣的動作循環往復,從而來幫助血液流通更加通暢,并進一步放松肌肉,緩解疼痛,對于恢復起到一定的輔助作用。
由于目前電療脈沖按摩片的研究已經市場化,因此將直接在外骨骼上面搭載電療脈沖按摩片,電療脈沖按摩片將直接搭載于腕部的外骨骼上面,由于上文說到腕部的外骨骼采用的是拱橋形的結構設計,并且由于腕部外骨骼上部采用的是齒輪連接的方式,因此電療脈沖按摩片不適合加載到腕部外骨骼的上部,因此將把電療脈沖按摩片加載到腕部外骨骼的下方,見圖9。電療脈沖按摩片放置于外骨骼的內部與腕部皮膚能直接相接觸,中間電源以及控制單元將采用嵌入式的方法,在腕部外骨骼底端流留出核心單元的地方,從內往外安裝電療脈沖按摩片,同時為保證按摩片能更好的貼緊手腕皮膚,因此將在按摩片與腕部外骨骼之間添加松緊帶,讓電療脈沖按摩片完全貼合于松緊帶上面,并且當手部套上外骨骼以后,由于松緊帶的作用,按摩片會更加緊密的貼在皮膚之上,從而起到最好的輔助效果。
4 結語
經過試驗分析可穿戴式手腕周期輔助恢復機器人能很好地起到保護效果,同時由于氣動柔性管的結構特性使得可穿戴式手腕周期輔助恢復機器人有很強的機動性,能夠很好地代替傳統的綁帶治療,同時進一步彌補了固定式手腕恢復治療儀笨重移動困難的問題,有很強的市場性與發展空間,本研究的可穿戴式手腕周期輔助恢復機器人有很高的延展性,可以拓展外接更多的輔助恢復以及應用模塊,以便來實現更多的豐富的功能。因此綜上所述,可穿戴式手腕周期輔助恢復機器人可以說是一款集成度高、發展性強、應用性廣、效果優良的手腕治療儀器,從全方位起到了對于手腕的輔助保護作用,也因此對于手腕部治療有著重要意義。
參考文獻
[1] 陳志美,曾俊,程勤何,等.自制手腕一體固定帶在麻醉恢復室中的應用[J].護理學雜志,2010,25(6):74.
[2] 王傳偉,單泉,陳硯,等.自調節式手腕康復外骨骼機構設計與相容性分析[J].機電工程,2021,38(3):398-404.
[3] 趙耀虹,夏昊,王自謙,等.手腕康復機器人功能設計與外觀設計[J].包裝工程,2019,40(8):118-122.
[4] 杜妍辰,管振興,張剛.一種新型手腕護理康復裝置[J].生物醫學工程學進展,2018,39(3):138-140+150.
[5] 黃磊,孫中圣,劉源峰.基于氣動柔性驅動器的手腕運動康復裝置[J].機械制造與自動化,2016,45(6):216-219.
收稿日期:2021-03-06
作者簡介:張軍正,男,北京人,本科,研究方向:機械工程。
Wearable wrist Assisted Recovery Robot Design and Control Research
ZHANG Junzheng, KANG Cunfeng, WEI Changhai
(Beijing Institute of Technology, Beijing? 100022)
Absrtact:With the gradual development of the times, people's material life has been greatly improved. All kinds of sports have become an indispensable part of people's life, but sports are always accompanied by certain risks. People injured by sports show an increasing trend every year. However, it can be found that among many rehabilitation instruments, there is not much research on wrist rehabilitation instruments, which leads to the restoration of bandage splint or plaster fixation in most of the time. These traditional methods have the problems of slow recovery cycle, difficult disassembly and complex replacement. At the same time, most of the wrist rehabilitation instruments that have been developed are large and medium-sized instruments, which can not be carried, can not play a real-time protective role, and can not be well applied to daily life. Based on this, this paper proposes a wearable periodic recovery robot with traditional strap splint, modern transmission and flexible positioning is proposed.
Keywords: Wearable; wrist assisted recovery robot; design and control research
