
整車掃描技術(shù)的研究與應(yīng)用
2021-09-10 15:09:58劉海波楊付四陳剛孫忠武
家園·電力與科技 2021年4期
關(guān)鍵詞:設(shè)備
劉海波 楊付四 陳剛 孫忠武

摘要:目前市場(chǎng)上整車掃描大體分為自動(dòng)機(jī)器人和人工手持式掃描,對(duì)于研發(fā)單位主要使用人工手持式掃描設(shè)備為主。不管使用市場(chǎng)上哪一類型的手持式掃描儀對(duì)整車進(jìn)行掃描,由于掃描的車型高低、大小不同都會(huì)存在一定的局限性,導(dǎo)致整車掃描的工時(shí)過(guò)多或場(chǎng)地不足。本文通過(guò)研究市場(chǎng)上主流的手持式人工掃描設(shè)備,在掃描整車時(shí)的優(yōu)劣性進(jìn)行分析。研究出一套針對(duì)不同車型的整車掃描的方案。對(duì)場(chǎng)地、工時(shí)和成本進(jìn)行有效控制。
點(diǎn)云數(shù)據(jù):是通過(guò)使用測(cè)量?jī)x器掃描產(chǎn)品及其組成部分的表面,得到的點(diǎn)數(shù)據(jù)集合,每個(gè)點(diǎn)包含有三維坐標(biāo)、反射強(qiáng)度、或色彩特征等信息。
定位坐標(biāo)點(diǎn):指粘貼在被掃描工件表面用于確定掃描三維圖像空間關(guān)系的標(biāo)記點(diǎn)。
基準(zhǔn)點(diǎn):掃描大件的多面體結(jié)構(gòu)時(shí),為了使兩個(gè)或兩個(gè)以上的面在同一基準(zhǔn)上進(jìn)行的掃描,設(shè)置的共用點(diǎn)。
前言
對(duì)于人工手持式掃描的設(shè)備,目前市場(chǎng)上大多采用激光技術(shù),各種設(shè)備對(duì)于掃描整車來(lái)說(shuō)或多或少都有一定的局限性,一個(gè)是單幅掃描區(qū)域的局限,掃描區(qū)域越小就會(huì)貼更多的目標(biāo)點(diǎn)(手持式需要粘貼2000多個(gè)目標(biāo)點(diǎn)),貼的目標(biāo)點(diǎn)越多,對(duì)于成本和工時(shí)(包括撕點(diǎn))也會(huì)消耗越多。相反掃描區(qū)域或識(shí)別區(qū)域越大,對(duì)于場(chǎng)地的要求也會(huì)越大(拍照或者接受點(diǎn)距離2米左右),所以我們根據(jù)設(shè)備的優(yōu)點(diǎn),不同廠家不同大小的設(shè)備配合使用,提出一套較優(yōu)的整車掃描方案。
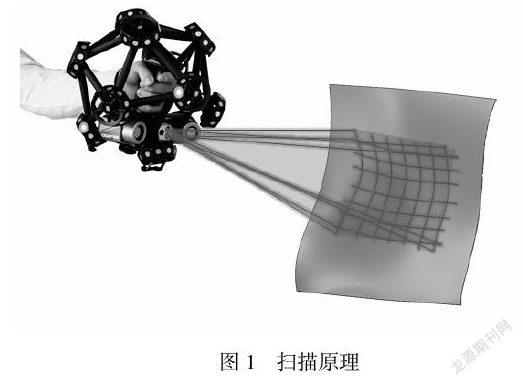
1 手持式激光掃描原理
掃描儀上的相機(jī)獲得投影到被掃描物件的激光,該激光會(huì)隨物件的形狀發(fā)生變形,通過(guò)計(jì)算獲得激光線所投影的線性三維信息。掃描儀再根據(jù)固定在物件表面的定位標(biāo)識(shí)點(diǎn)來(lái)定位掃描儀在掃描過(guò)程中的空間位置,這些空間位置被用于空間位置轉(zhuǎn)換。當(dāng)掃描儀移動(dòng)時(shí),不斷獲取激光所經(jīng)過(guò)位置的三維信息,從而形成連續(xù)的三維數(shù)據(jù)。
2 ?掃描設(shè)備優(yōu)缺點(diǎn)
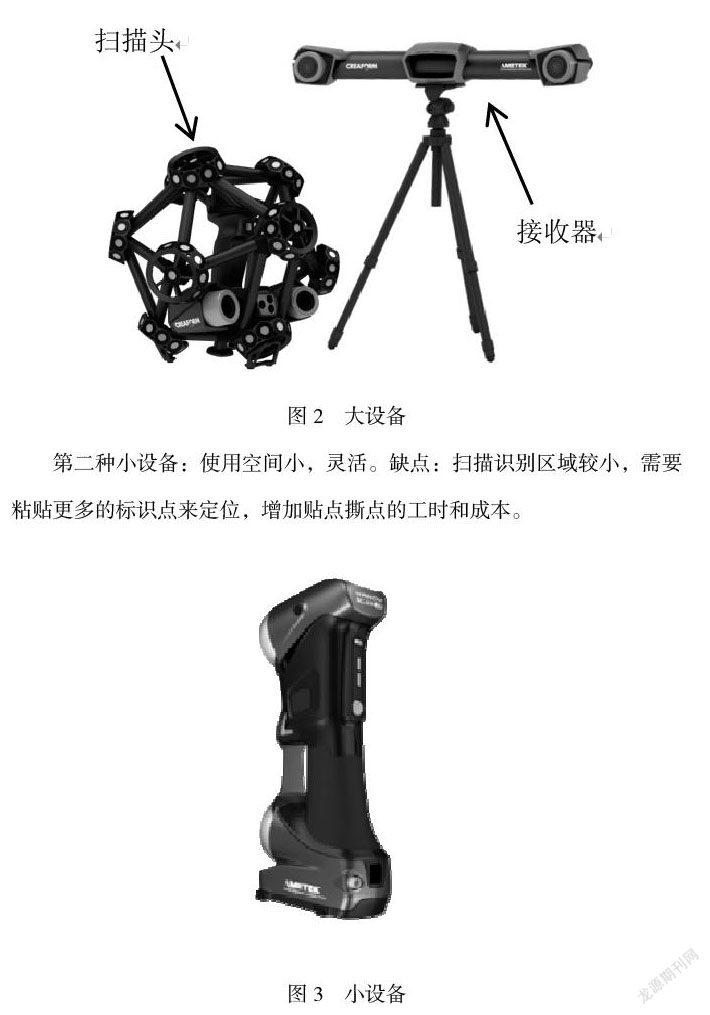
目前國(guó)內(nèi)外掃描設(shè)備廠家較多,每套設(shè)備來(lái)說(shuō)各有優(yōu)劣勢(shì)。我們將掃描儀的識(shí)別區(qū)域的大小,分為大設(shè)備和小設(shè)備兩種。
比如大設(shè)備:貼定位標(biāo)識(shí)點(diǎn)較少,直接錄點(diǎn)不用經(jīng)過(guò)保存轉(zhuǎn)化。缺點(diǎn):車身較高的車型來(lái)說(shuō)(SUV、MPV)車頂?shù)幕鶞?zhǔn)點(diǎn)較難放置和錄取;需要較大的場(chǎng)地和良好的視野,6/7座車型的第三排座椅、地毯和假人掃描無(wú)法掃描。
第二種小設(shè)備:使用空間小,靈活。缺點(diǎn):掃描識(shí)別區(qū)域較小,需要粘貼更多的標(biāo)識(shí)點(diǎn)來(lái)定位,增加貼點(diǎn)撕點(diǎn)的工時(shí)和成本。
兩種設(shè)備之間是否可以優(yōu)劣互補(bǔ)呢?用大設(shè)備錄點(diǎn)用小設(shè)備來(lái)掃描、用小設(shè)備拍照用大設(shè)備掃描或者大設(shè)備與大設(shè)備之間小設(shè)備與小設(shè)備之間相互取長(zhǎng)補(bǔ)短呢?
3 ?整車掃描原理分析及驗(yàn)證
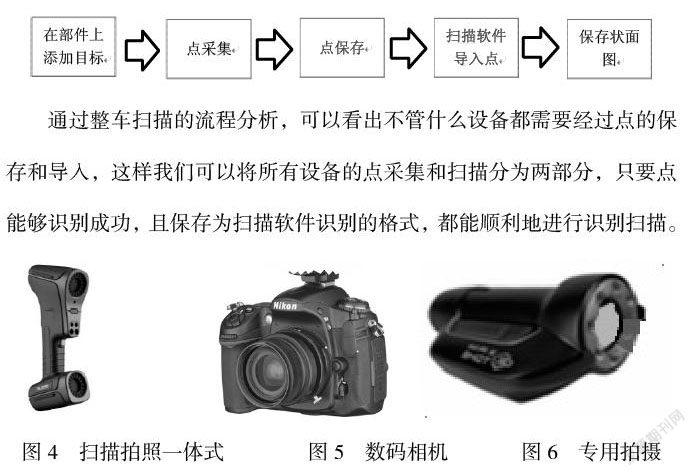
我們將整車掃描流程進(jìn)行分析:
通過(guò)整車掃描的流程分析,可以看出不管什么設(shè)備都需要經(jīng)過(guò)點(diǎn)的保存和導(dǎo)入,這樣我們可以將所有設(shè)備的點(diǎn)采集和掃描分為兩部分,只要點(diǎn)能夠識(shí)別成功,且保存為掃描軟件識(shí)別的格式,都能順利地進(jìn)行識(shí)別掃描。
我們將不同廠家和不同錄點(diǎn)的設(shè)備進(jìn)行試驗(yàn),1、掃描拍照一體式,2、數(shù)碼相機(jī),3、專用拍攝儀進(jìn)行錄點(diǎn),驗(yàn)證了以上推理。但是在點(diǎn)的格式轉(zhuǎn)化時(shí),或者在另一臺(tái)設(shè)備上識(shí)別掃描時(shí)會(huì)不會(huì)有精度損失,損失的精度能否滿足我們整車掃描呢?還需進(jìn)行一般驗(yàn)證。
4 精度驗(yàn)證
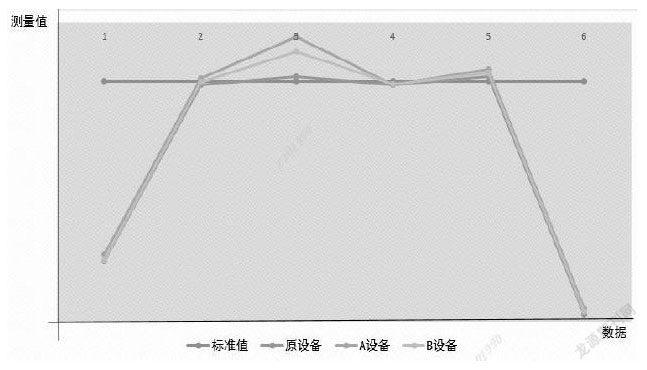
在車身前端放置兩顆標(biāo)準(zhǔn)球,首先以最短距離(不超過(guò)1米)多次掃描出兩個(gè)球的球心距離,取其平均值,作為標(biāo)準(zhǔn)值,再沿著一個(gè)球的一側(cè)進(jìn)行拍照,另一個(gè)球結(jié)束。將拍照完后的點(diǎn)分別用原套設(shè)備、其他公司的A設(shè)備、B設(shè)備分別進(jìn)行掃描,測(cè)量球距離。
4.1各設(shè)備精度
4.2 數(shù)據(jù)掃描收集
原設(shè)備進(jìn)行拍照,沿著一個(gè)球的一側(cè),逐步拍攝到另一側(cè),確認(rèn)各定位點(diǎn)坐標(biāo),作為基礎(chǔ)數(shù)據(jù)。
1)用原設(shè)備掃描多次得出數(shù)據(jù)。
2)將拍攝坐標(biāo)點(diǎn)導(dǎo)入到其他公司設(shè)備A,再掃描多次得出數(shù)據(jù)。
3)將拍攝坐標(biāo)點(diǎn)導(dǎo)入到其他公司設(shè)備B,再掃描多次得出數(shù)據(jù)。
經(jīng)過(guò)試驗(yàn)沿著12米的路線進(jìn)行掃描,誤差±1毫米之內(nèi),對(duì)于整車掃描來(lái)說(shuō)該誤差可以接受。通過(guò)以上實(shí)驗(yàn)得出以下結(jié)論:
1)拍攝后的坐標(biāo)點(diǎn),能夠在大多數(shù)不同廠家的設(shè)備上進(jìn)行使用(只要格式可以識(shí)別)。
2)拍攝的坐標(biāo)點(diǎn)精度不會(huì)根據(jù)格式的變動(dòng)改變,也不會(huì)導(dǎo)入到其他廠家的設(shè)備而改變。
3)按理在使用同一拍攝的坐標(biāo)點(diǎn)時(shí),掃描的精度取決于掃描儀的掃描精度,其他因素不變的情況下,掃描儀的精度越高掃出的3D圖形精度越高,反之亦然。
點(diǎn)在錄取和拍攝中,根據(jù)標(biāo)尺或整車點(diǎn)進(jìn)行誤差均分,不會(huì)存在誤差應(yīng)掃描路線而積累,所以當(dāng)點(diǎn)的坐標(biāo)固定,在其他因素(環(huán)境、人員等)三維掃描的精度就只與掃描設(shè)備有關(guān)。
5 實(shí)際應(yīng)用
在整車掃描中,整車掃描以大設(shè)備為主,可以貼較少的點(diǎn),至于采用直接錄點(diǎn)和拍照錄點(diǎn)還需要根據(jù)車身的高度進(jìn)行判斷,如果車身較高,難以放置和錄取基準(zhǔn)點(diǎn),就用拍照+點(diǎn)識(shí)別方式;如果車身較低想要識(shí)別區(qū)大貼點(diǎn)掃那么就需要使用到接收器,但是對(duì)于第三排座椅來(lái)說(shuō),由于車門開(kāi)度有限掃描頭無(wú)法連接到接收器,這是就需要大小設(shè)備進(jìn)行配合使用。
參考文獻(xiàn):
[1]羅先波、鐘約先、李仁舉、三維掃描系統(tǒng)中的數(shù)據(jù)配準(zhǔn)技術(shù)。清華大學(xué)報(bào):自然科學(xué)版,2004。張結(jié)實(shí)、李玉杰、肖瑤、關(guān)節(jié)臂式坐標(biāo)測(cè)量系統(tǒng)整車掃描方案優(yōu)化,中國(guó)新技術(shù)新產(chǎn)品 2019。
[2]嚴(yán)麗萍、淺析三維激光掃描技術(shù)的應(yīng)用于發(fā)展,創(chuàng)新與實(shí)踐2019。
作者簡(jiǎn)介:劉海波,1984.2,男,漢族,四川;本科,工程師,一直從事汽車制造和研究行業(yè)至今,編制多篇公司的相關(guān)制度和指南等。
廣州汽車集團(tuán)股份有限公司汽車工程研究院 ?廣東廣州 ?511400
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
