家庭服務機器人現狀與展望
2021-09-10 07:22:44毛志賢朱曉龍韋建軍王春寶劉銓權段麗紅王同羅承開張廣帥王玉龍龍建軍林焯華
機電工程技術 2021年2期
毛志賢 朱曉龍 韋建軍 王春寶 劉銓權 段麗紅 王同 羅承開 張廣帥 王玉龍 龍建軍 林焯華





關鍵詞:家庭服務機器人;信息感知;路徑規劃;人機交互;仿人
0引言
人工智能作為新一輪引領技術革命的前沿技術,正在顛覆行業、產業的生產方式,也正在改變人類的生活方式,如圖1所示。服務機器人作為人工智能技術的最佳載體之一,正在向家居、餐飲、客服、物流、醫療、教育等多個行業滲透,2016年全球家庭服務機器人銷售額為25.8億美元,銷量為670萬臺,占服務機器人銷售額比重由15.4%提升到35.4%。幾年前,家庭消費者感受不到家庭服務機器人給日常生活帶來的便利,而如今廣大消費者接受了家庭服務機器人這個概念詞,快速使用家庭服務機器人產品。地面清潔機器人地寶、自動擦窗機器人窗寶、空氣凈化機器人等已經進入家庭,輔助人類完成清潔衛生、物品搬運、家電控制、家庭娛樂、病況監視、兒童教育、報時催醒、電話接聽等任務。NA0機器人仿人的外形,可實現人機互動,具有治愈抑郁癥兒童的功能,但是功能較單一。某公司的Roomba清潔機器人可對家庭中的各個區域地面進行清潔,緩解了人類做家務的勞累,但清潔機器人只是實現了清潔的單一功能,沒有實現多功能的集成和人機交互。掃地機器人承擔了簡單的家庭勞動工作,但缺少了情感交互。而Robv-Mini機器人集成了人工交互技術,提高了機器人的趣味性,滿足人類更多的需求。工業機器人之父約瑟夫·恩格爾伯格認為家庭服務機器人進入家庭是一種必然的趨勢。
2020年2月4日,工信部發布了《充分發揮人工智能賦能效用協力抗擊新型冠狀病毒感染的肺炎疫情倡議書》,中國掀起了大規模的AI抗疫熱潮。危機中蘊藏著機遇,疫情期間,因為病毒的兇猛,更多的場景需要無人化,自動設備和機器人可以替代人上“戰場”。今年春節期間爆發的疫情,因為病毒傳染性強,一線工作人員十分危險,這是一個非常適合AI機器人的應用場景。而家庭服務機器人的端茶送水、監控、人機交互等基本功能則可以代替一線工作人員給感染住院患者做引導與基本護理,共同加入這次疫情戰役,在提高效率的同時,還可以降低一線工作人員感染新型冠狀病毒的風險。
1研究現狀
家庭服務機器人根據智能化程度和用途分為初級小家電類機器人、幼兒教育娛樂類機器人和人機互動式家庭服務機器人。家電清潔安防類機器人可實現智能除塵功能,新松保安機器人、iRobi等安防類機器人可以檢測家中煤氣、水龍頭是否關閉,將檢測結果以郵件的形式發送給主人,有效實現了“看家”功能。樂樂勇智能、小杜等教育類機器人可以代替忙碌的父母輔導孩子學習,娛樂機器人可以可以緩解成年人下班回到家中的疲勞感,成為人類生活中的靈魂伴侶。
1.1初級小家電類機器人
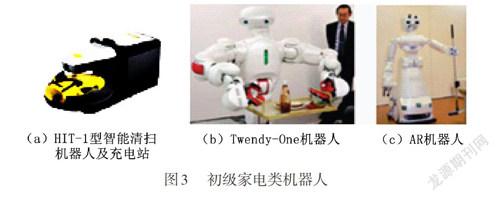
家電類機器人不僅可以有效實現防盜監測和電氣煤氣安全檢查等安防功能,而且可以替代人完成清潔衛生、家電控制等家電服務工作,如圖2~3所示。
世界上最早的一臺家庭清潔機器人RC3000,其機構設計扁平,能夠移動到床、沙發、茶幾等家具的下部進行清潔工作,當遇到障礙物時,機器人可以利用自身配置的光電傳感器和芯片改變本身的角度,繼續執行任務。基站作為RC3000機器人的一部分,通過向機器人發射紅外定位和導航信號,告知機器人目的地的路徑。
掃地智能服務機器人HIT-1,根據配置的嵌入式智能特點,使得該機器人清掃的面積較大。該機器人的智能體現在可以根據自身電量不足自主到充電站充電,減少了人們更換電池的煩惱,當電量充滿之后,繼續回到原來的位置進行清掃工作嗍。
東京早稻田大學與20多個公司合作研制的成功仿人機器人“Twendy-One”,“Twendv-One”有8個手指,全身布滿傳感器和控制性肌肉,肢體動作非常靈活和熟練,人類通過一個搖桿控制機器人將殘疾人抬到床上、從烤箱取面包等動作,該機器人成本較高。
幫手機器人“AR”(Assistant Robot)接近人類體型,能根據褶皺區分衣物,有效集成了洗衣機、送餐、拖地的功能。
清潔家電類機器人從初始的單一清潔功能逐漸向褶衣服、從烤箱取面包的復雜功能轉變,從仿人的角度出發,設計具有靈活雙臂的家居服務機器人,可有效提高機器人為人類服務的效率。
1.2幼兒教育娛樂類機器人
幼兒教育娛樂類機器人一方面可以代替忙碌的父母教育和監督孩子,另一方面可以為人類帶來情感上的娛樂和放松。幼兒教育娛樂類機器人如圖4~5所示。
“irobi”家用服務機器人可以利用自身配置的檢測設備檢測大門是否上鎖和煤氣是否已經關閉,當家里兒童想學英語或者韓文的時候,irobi機器人可以帶領孩子一起念書,另外機器人可以給哭鬧的孩子講故事和唱兒歌。2017年,某公司團隊研發的布丁豆豆機構外觀設計可愛美觀,深受孩子們喜歡凹。布丁豆豆機器人是一款雙語學習機器人,可通過頭部的識別裝置快速識別并復述圖書內容,減少兒童的壓力,提高兒童的注意力。
華碩小布機器人外表萌寵,科技時尚感強,磨砂的觸感溫柔舒適,一方面保持了小布機器人的可愛,另一方面也保證了孩子們的安全。小布的頭部通過一根靈活而堅固的金屬關節與身體接觸,而且通過內部智能電機驅動,可以做出很多靈活的頭部動作,使其顯得更加活靈活現。小布背部還有緊急開關的保護蓋、防跌落傳感器、超聲波距離傳感器等部件,機身兩側是驅動輪,尾部是轉向輪,驅動輪周圍配備柔光RGB燈效。臉部安裝的支持10點觸控的觸摸顯示屏在與人互動時可以表現豐富的表情。
360兒童機器人利用大數據搜索和語音交互功能陪伴孩子們的成長,給孩子們帶來歡樂,該機器人具備攝像機拍攝的功能,利用動聽的童歌哄睡小孩,同時還可以為父母教育兒童,陪伴孩子學習。商用機器人“優友”,不僅可以實現教育孩子的功能,還可以代替父母看管孩子,同時可以給一些咨詢人員帶來答案,實現咨詢導購的功能。
在孩子教育方面,教育機器人Nao不僅可以實現教育功能,還可以在眾人矚目下輕松自如地踢球,給大人和小孩帶來無限的歡樂,成為人類娛樂的產品,Nao機器人還可以像人類一樣在開放式編程框架下跳舞等。
1.3人機互動式機器人
人機互動式機器人在服務機器人領域中是非常重要的,人際互動的好壞直接影響機器人與用戶的交流,人際交互由初始的簡單界面的交互到情感情緒肢體交流的交互,人機交互機器人如圖6所示。
“小Q機器人”可用于中國媽媽對孩子的早期教育,也可成人用來自身娛樂,讓機器人成為人們的在線生活伴侶。該機器人具備時效性的通訊技術,加強了父母與孩子的溝通,促進孩子與父母的親情,小Q機器人憑借自身配置的機器人智能技術,可以展示豐富、生動的表情動作,同時依靠語音人機交互技術提高用戶的使用興趣,與騰訊QQ結合,成為人們的線上生活伴侶。
北理研制的“匯童”BHR和浙大研制的Wu&Kong仿人機器人可以像人類一樣連續地打乒乓球,對打次數高達110回合,在機器人與人對打時,最高回合度比機器人之間的對打度高30個回合,在這樣高回合度對打的情況下,促進了傳感、伺服、驅動控制技術的發展。
2014年,日本軟銀集團和法國Aldebaran Robot-ics聯合推出全球首款配備情感識別功能的機器人Pepper,Peper機器人可以根據身上配置的麥克風、攝像頭和3D傳感器可以識別人的一些表情動作,比如人高興的表情、憤怒的表情均可識別出來;不僅如此,Peper機器人在面對人類的這些情緒時,可以與人類進行一些互動,做出一些反應。
Willow Garage實驗室研制出的PR2機器人,可以實現人機交互,通過使用文字和聲音指令來做早餐的PR2廚房機器人像人類一樣,該機器人有2只手臂、7個關節,靈活度很高,可以打開冰箱取東西;當機器人電量不足時,可以給自己找充電器充電,還能根據說明書制作咖啡。但是機器人的尺寸很大,而且其價格也非常昂貴。
上海某公司研發的陪伴型服務機器人維拉機器人是老年人的一款福利,老年人可以利用該機器人獲得生活上的幫助,還可以通過機器人查詢需要的信息和一些日程計劃。浙江某公司研發的陪伴機器人阿鐵,具備36種仿人交互表情來滿足老年用戶需求的差異,具備看護、娛樂互動及簡單的在線醫療咨詢等服務功能。該機器人不僅可以提醒老人吃藥,實現智能化,還能以不一樣的視覺效果呈現在老年人面前,提起老年人的興趣。該機器人的人機交互界面可以進一步改善,豐富機器人對語言的識別性,高效識別老年人的情感,實現機器人和老人的深入互動。
2關鍵技術
家庭服務機器人是多種技術的融合和體現。需要掌握關鍵技術的3~4種才能進入這個市場,包括人工智能、語音識別與合成技術、解析與交互技術、導航及定位技術、機器人跟隨技術、機器人多機調度技術、機器人底盤技術。以下將重點闡述信息感知、路徑規劃和人機交互技術。
2.1信息感知技術
家庭服務機器人具備3個特征:感知、決策和執行。機器人信息感知技術是人機互動功能實現的基礎,重點研究方向是多傳感器信息融合技術,通過將視覺、聽覺、觸覺等傳感器的信息相互融合,使機器人可以達到最優的感知能力。傳感器有內、外部傳感器之分,內部傳感器的主要功能是是檢測跟蹤機器人自身的狀態,內部傳感器包括里程計、加速度計、陀螺儀等;外部傳感器是用于機器人以外的感知,外部傳感器包括超聲波傳感器、激光測距傳感器、視覺傳感器。
人類可以看見外面世界的顏色,感覺高鐵的速度等,這些信息是通過視覺、觸覺、聽覺和嗅覺等感知世界的結果,其中約80%的信息是由視覺獲取的,可見,視覺器官是人類最重要的感知器官。同樣,機器人視覺是機器人中重要的功能,也是機器人感知世界的核心技術。
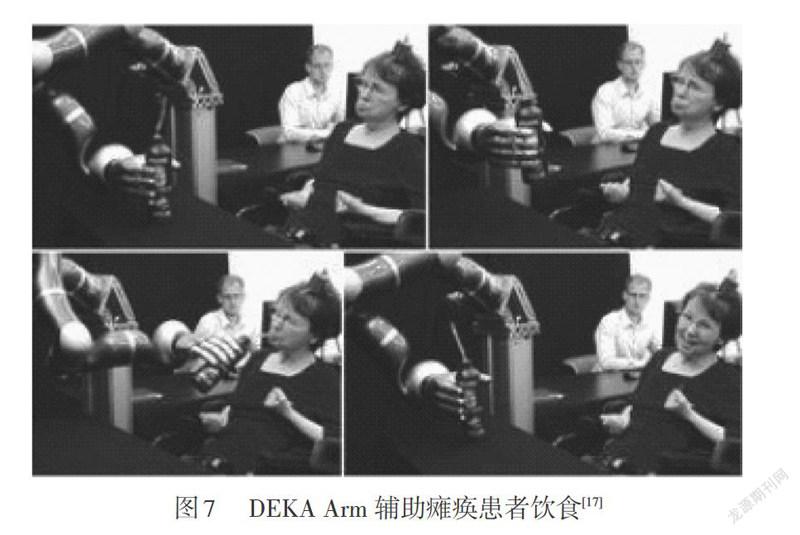
智能認知與感知是機器人與人、機器人與環境進行交互的基礎,其中腦生肌電認知、城市環境下移動機器人對環境的感知與識別以及智能空間是智能認知感知技術的3個技術。在腦生肌電認知方面,研究人員希望通過腦波、肌肉神經信號幫助殘疾人士解決生活上的細節問題,比如操作智能輪椅、假肢等器具以輔助行走。功能假肢DEKA Arm項目團隊介紹了通過建立一種神經界面將大腦皮層神經活動翻譯成能夠操縱輔助裝置的控制信號,從而幫助癱瘓者提高獨立生活能力。同時也證明了長期癱瘓或中樞神經受到損傷的人可以使用神經信號實現控制復雜裝置的功能,如圖7所示。Rebsamen等利用腦電波控制輪椅移動,規劃已知環境特定目標的路徑,而對于用戶只是集中有限數量的目標,從而用戶可以降低因為注意力過度集中而引起的疲勞,輪椅移動的正確率也得到了提高。
2.1.1視覺感知信息處理
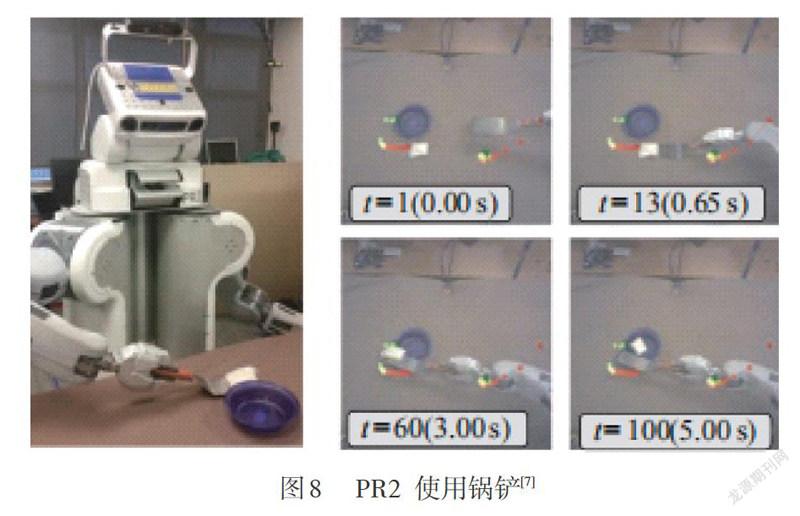
傳感器技術的發展可以促進機器人感知信息的能力,機器人傳感器根據感知信息的不同分為視覺傳感器、力覺傳感器、觸覺傳感器、接近覺傳感器、距離覺傳感器、姿態覺傳感器、位置覺傳感器。通過研究機器人視覺這一門單獨的學科,研究者可以解決機器人技術的復雜性,人一機一環境交互系統基于視覺感知信息處理。PR2機器人在非結構化環境可以開冰箱取飲料基于PChitta等利用的視覺圖像處理方法,PChitta等不僅應用了二維、三維的視覺圖像處理方法,還將觸覺信息、關節力矩、位置信息列入確定機器人自身狀態的標準。Elliott等通過三維點云、圖像分割、K均值聚類等方法可以使PR2機器人識別出不同的的物體,實現抓取物體的功能。PR2機器人可以像人類一樣將煮飯需要的米倒入鍋中,這個功能的實現基于Finn等提出的方法,這種方法是通過相機拍攝下來的圖像自動構建狀態空間,該機器人是通過深度空間自動編碼器實現對周圍環境的感知,實現對機器人的控制功能,并利用此方法控制PR2用鍋鏟將一小袋米放入鍋中。如圖8所示。
機器人iCub可以將觸覺和手、眼同時利用起來,實現手、眼協調的功能,該機器人可以完成復雜的肢體動作,同時對外界的感知也較強,具有人與環境交互的功能,機器人可以使用語言和基本的一些動作與人進行友好地交互。機器人Jibo屬于家庭社交型的一種機器人,可實現較多的功能。當人類覺得無聊時,它會像人類一樣與人類進行交流,讓人類覺得自己是和一個真實的人聊天;同時,該機器人還可以幫人類解決全家福拍照的問題,有效地擔任了家庭助理一職。
2.1.2非視覺感知信息處理
對于非視覺感知信息處理,人類可以根據力覺感受外界對我們施加力的情況,通過觸摸外界的事物感受物體的材質,這些力覺、觸覺等都屬于非視覺感知。對于機器人而言,非機器人視覺的信息處理是由非視覺傳感器處理的,比如超聲波傳感器和激光傳感器。超聲波傳感器和激光傳感器的作用對象是最小環境模型,這個最小環境模型是屬于室內標識的,根據這些最小環境模型能夠得到最高效率的信息,比如得到環境的結構化特征,這種結構化特征中直線和墻的特征對應,角和凸角特征對應,實現機器人對外界環境的識別,在環境特征中,重要的是機器人對環境識別的準確性和穩定性,對于環境特征的選取和闡述,就顯得不是很重要。Hough變換法的使用在直線特征提取這一方面研究得較為透徹,但是對于柵格大小的選擇方面就會比較困難,除此之外,Hough變換法的算法不是很完美,沒有將噪聲和不確定性帶來的影響考慮在算法中,導致參數估計不準確。丁剛等進行一些實驗證明了支持向量機的有效性和實用性,同時識別率和泛化能力也得到了研究者的肯定,識別率和泛化能力都較高,此次實驗的成功在于研究者將超聲波獲取到的周圍環境信息視為環境特征,以六維特征向量表達周圍的環境,之后將這些信息實現機器人對環境的識別。另外室內外結構化環境可以在多超聲波傳感器的作用下視為凸角、墻角等,除此之外周圍隨處可見的物體也可在多超聲波傳感器的作用下視為墻角、通道等,在對環境建模時,可以使用線段匹配的方式,這些例子的使用在文獻中可以體現出來。于金霞等對感知的環境信息進行特征提取,通過對提取信息的研究,遺傳聚類算法應運而生,遺傳聚類算法的有效性在于金霞等人的研究下得到了證實。
2.2路徑規劃
路徑規劃技術是根據選擇路徑最短或運算時間消耗最短等指標,選擇一條最優或者次優的避障路徑。路徑規劃最本質的問題是在幾個約束條件下解出最優解。路徑規劃方法可以分為2種類型,第一種是全局地圖信息的路徑規劃,第二種是局部地圖信息的路徑規劃,第二種路徑規劃也可以叫做局部路徑規劃,這2種路徑的分類是依據環境信息的已知程度來劃分的。
在傳統的起始點一目標點的路徑規劃路徑算法中,常用的有路線圖方法、單元分解法、勢場法、螢火蟲算法和遺傳算法。家庭服務機器人中,掃地機器人、窗寶機器人、搬運機器人實現簡單的掃地擦窗搬運功能,路徑規劃避障是主要的關鍵技術。然而傳統的起始點一目標點的路徑規劃并不適用于清潔掃地、擦窗等任務,掃地機器人和擦窗機器人最優的算法已不再是傳統仿人起始點一目標點算法所能滿足的,而是通過覆蓋路徑算法實現,這種算法可以使機器人有效避開含障礙物的地方,高效順利完成任務。
2.3人機交互技術
人機交互技術指的是通過設備和界面完成給定交互任務的具體方法。家庭服務機器人中,目前主流的人一機交互方式有聽覺控制、視覺控制、力觸覺控制。手勢識別、表情識別、身體運動識別(如識別跌倒、跑步等動作)、人的檢測和跟蹤、圖像顯示(如顯示笑臉或者用戶要求的信息)等是基于視覺的例子應用。基于聽覺的控制例子主要有語音識別、非語音識別(如識別哭泣、尖叫、開門聲音、走路聲音等)、語音輸出、故事朗讀、歌曲播放、鈴聲提醒等。語音識別技術是近年來信息技術領域的重要科技之一,語音識別技術從文字表面意思看,針對對像主要是語音,語音信號可以轉化為人們熟悉的文本文檔,語音轉化為文檔是通過一種技術實現,這種技術就是編碼技術,編碼技術可以將機器人識別不了的語言轉化為機器人能夠識別的語言,從而實現對機器人的控制,實現人機交互。
觸屏觸摸感應的人機交互方式是基于力觸覺的控制。另外腦電交互紅外感應也屬于人機交互的2種方式。
人機交互方式各種各樣,但對于不同類型的家庭服務機器人需要選擇最優的人機交互方式。Reem這類服務機器人因為工作環境的不同,所以對這類機器人交互方式的要求就比較高,面對商場里各種各樣的人,有的人喜歡用語音和機器人進行交流,有的人喜歡用手勢和機器人進行交互,而有的人則喜歡通過觸摸屏幕的形式和機器人交流,所以在設計這種商用機器人時,應該站在不同用戶的角度考慮問題,使得人機交互方式更多更廣,滿足廣大消費者的要求。而對于給予用戶陪伴的機器人Pepper,人機交互方式應該更加豐富,比如可以和正在陪伴的用戶進行情感上的交流,能夠根據被陪護的人員表情做出回應。Twenty-One機器人一般在家里輔助主人做家務,與用戶的交互十分密切,所以在完成家庭任務的同時,也需保證與主人的和諧相處,實現人機交互的有效性與安全性。
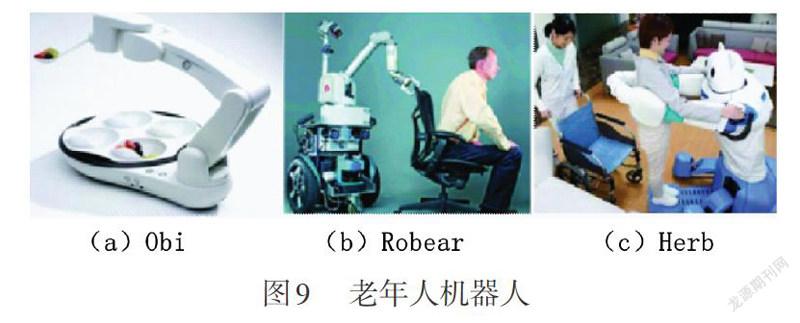
美國研制的0bi護理機器人,這款機器人可以輔助人類進食,照顧吃飯不方便的老年人或者殘疾人。對于人機交互方面,該機器人的交互界面比較單一,但可以實現人與機器人的基本交互,對于不方便吃飯的用戶可以利用人機交互機界面上的按鈕,就可以控制機械臂以達到喂食的目的,如圖9(a)所示。日本理化學研究所研制的Robear機器人像人類一樣,配置有一雙手,可以實現抱住用戶移動的功能,動作嫻熟,如圖9(b)所示。美國卡耐基梅隆大學研制的Herb,在結構上有2個手臂,像人類的雙手一樣,能夠實現眾多的功能,除此之外還配置有2個移動的腳輪,根據自身配置的硬件設備可以實現機器人對周圍環境的感知與識別,如圖9(c)所示。
值得一提的是人機交互技術在教育娛樂機器人中是核心技術,人機交互方式變得越來越簡單,可通過人的面部表情和情緒來實現人和機器人的互動,由最簡單的界面交互到人臉識別的交互再到人思想的交互,機器人可以通過微表情知道用戶的意圖,研究思路逐漸向仿生角度出發,機器人的最高境界是使機器人具有人的思維,與人正常溝通交流,這就需要將多種技術互相融合,提高機器人人機交互的可靠性與成熟性。
3結束語
仿人服務機器人作為21世紀高技術制造業和現代服務業的重要組成部分,已成為衡量一個國家機器人技術水平的重要標志。仿人服務機器人有著良好的應用前景,正逐步向家庭服務、助老助殘等領域邁進,仿人服務機器人有著像人類一樣靈活的功能,朝著智能化、標準化等方向發展,從仿生材料、仿生外形和仿生思維出發,達到與人類各方面相近功能的目的,最終使得機器人可以適應更加復雜、非結構化的家居環境,高效率滿足用戶們的需要,所以家庭服務機器人可以從仿生的角度設計家庭服務機器人的本體結構和思維執行能力,具備人的思維執行決策能力的家庭服務機器人可以為疫情服務機器人的研制提供有效來源,本文對家庭服務機器人的未來發展趨勢做出如下總結。
(1)機器人具有人形化的外觀非常重要,這是與人類建立情感聯系的基礎,那些與人類相同的行為舉止,才能觸發人類的同理心,進而取得彼此的信任。在仿人機器人上需探究以下關鍵技術:①仿人機器人的機構設計;②仿人機器人的運動操作控制,包括實時行走控制、手部操作的最優姿態控制、自身碰撞監測、三維動態仿真、運動規劃和軌跡跟蹤;③仿人機器人的整體動力學及運動學建模;④仿人機器人控制系統體系結構的研究;⑤仿人機器人的人機交互研究,包括視覺、語音及情感等方面的交互;⑥動態行為分析和多傳感器信息融合。
(2)需解決低成本和高精度的矛盾,家庭服務機器人面對的是家庭的非結構化的環境,對傳感器的要求非常高。
(3)需解決傳感器融合的技術矛盾,增加機器人傳感器的數量可以提高它對環境的理解和任務決策,但卻增加傳感器誤差和信息不完整的可能。
(4)需解決實時性與有限資源的矛盾,家庭服務機器人大多為小型化。
