城市多旋翼飛行汽車的對接鎖緊裝置設計
2021-09-10 07:22:44盧曉煜林威
機電工程技術 2021年2期
盧曉煜 林威



關鍵詞:城市多旋翼飛行汽車;對接鎖緊裝置;有限元分析;動力學仿真
0引言
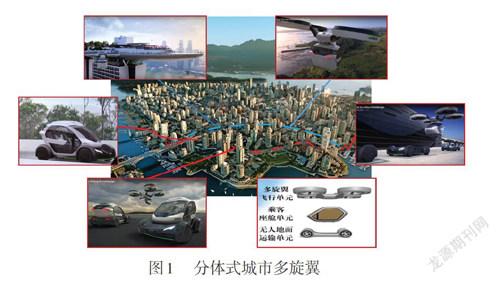
目前,城市交通擁擠、港口運輸不便已經成為一種城市普遍的現狀,城市分體式多旋翼飛行汽車的問世較好地緩解了這個現狀,同時其各個單元間的關鍵對接技術在國內仍處于空白狀態。分體式城市多旋翼如圖1所示。目前,國外POPUP所研發的旋轉自鎖對接技術處于原理驗證階段,而國內此技術處于完全空白狀態。因此,多旋翼各單元間對接裝置的研發設計將成為一種未來的發展趨勢。與此相關的技術包括:國內外研制的異體同構周邊式對接技術和以AGI、ATI與RAD等美國公司為代表所研發的機械臂末端執行器的快換對接技術及OdysseyIIB AUV水下對接技術等。
本文所研究的對接裝置是一種基于飛行單元與箱體單元間的快速對接、分離裝置,第二部分是關于POP UP以及相關技術的背景總結及其優缺點對比;第三部分是結合任務性、功能性要求對整體工作原理設計與對接裝置的結構設計、電機的選取及關鍵零部件的有限元分析;第四部分是整合鎖緊裝置的動力學驗證;最后一部分則是對本設計的結論總結。
1對接裝置
旋轉自鎖對接裝置是目前用于城市多旋翼飛行汽車的對接、分離的現有技術,其通過上下兩個卡扣的旋轉來實現裝置的鎖緊、分離。此對接裝置結構簡單、輕量化程度高,但是其對接要求精度高、冗余度低致使可靠性不高。
根據表1所示的幾種相關對接技術及其優缺點對比、分析,本文設計了一種用于飛行單元和箱體單元間的全新對接裝置,滿足可靠性高、空間占比小、冗余度高等功能性要求,且對接裝置能夠實現多次、快速的對接和分離。
2對接裝置的方案設計
2.1指標性要求
對接裝置的主要任務是實現飛行單元與箱體單元間的導引、捕獲、定位、鎖緊,同時應具備電、通訊接口,接口主要具備以下幾個特點。
(1)可靠性:載人式的城市多旋翼,需要快速對接、分離,所以需要高可靠性。
(2)輕量化:質量越小,負載越小,飛行單元承重就比較小,飛行時長越長。
(3)小體積:不占用過多系統空間。
(4)冗余度:其中一個失效不影響整體對接狀態。
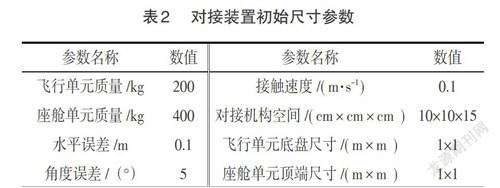
表2所示為整體對接裝置的初始尺寸以及對接時產品本身所允許的誤差。
2.2總體設計
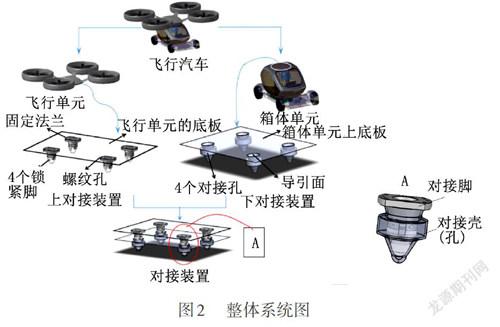
本文所設計的對接裝置是一種用于飛行單元和箱體單元的對接鎖緊裝置,其整體的系統如圖2所示。對于本文的研究內容,如果全部按照實際尺寸進行結構設計,工作量過于龐大,因此進行整體簡化設計,并對整個鎖緊裝置進行原理驗證。
飛行汽車由飛行單元(多旋翼)、對接鎖緊裝置、箱體部分(箱體單元與底座單元的結合,稱行駛模態)組成。多旋翼的下底板與4個鎖緊腳通過固定法蘭采用螺栓進行固定,同時對接腳也作為多旋翼整體的支撐腳,用于其單獨著陸。箱體部分的箱體頂端上底板與鎖緊孔也通過法蘭進行連接,同時也采用螺栓進行固定。當多旋翼通過導引裝置捕獲目標至預定范圍后,上對接裝置動力漸進式消失,4個對接腳與箱體單元的上對接底板互相接觸;位置校正裝置開始工作,保證對接腳與對接孔水平誤差為0,角度誤差小于或等于5°;鎖緊裝置由于重力作用沿著導引面下降,直至完全接觸,鎖緊指開始鎖緊,電、通訊開始連接傳輸數據。本文僅對對接鎖緊裝置進行設計、研究。
2.3對接鎖緊裝置設計
2.3.1結構設計及原理
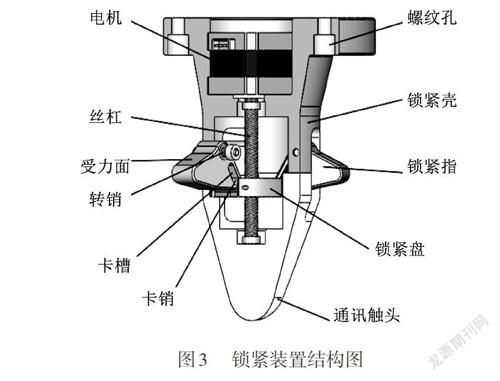
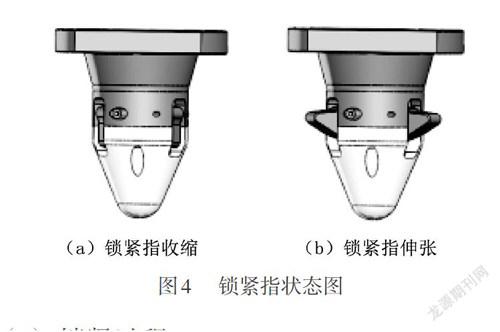
對接裝置的工作過程分為鎖緊和分離2個過程。鎖緊過程分為鎖緊指收縮、下降、伸張鎖緊3個狀態;分離過程分為鎖緊指收縮、快速分離2個狀態。鎖緊裝置的結構圖如圖3所示,鎖緊指狀態圖如圖4所示。
(1)鎖緊過程
目標被導引、捕獲至預定范圍內,鎖緊指處于初始(收縮)狀態;整個鎖緊裝置因重力作用沿導引面下降至鎖緊裝置與鎖緊孔完全接觸,通訊、電觸頭完全接觸;完全接觸信號傳至電機,電機啟動驅動絲杠開始工作,絲杠的轉動使其鎖緊盤勻速向下移動,鎖緊盤的移動帶動卡銷在卡槽中運動,通過轉銷推動鎖緊指開始伸張,完成對接裝置鎖緊要求。至此,整個鎖緊過程完成。
同時,在整個鎖緊階段,絲杠與鎖緊盤通過螺紋連接,采用等距、較小螺距的絲杠螺紋,此應用可以保持整個鎖緊過程的穩定,且較小螺距的螺紋升角小于螺旋副的當量摩擦角,極大地增加了整個對接裝置的可靠性。
(2)分離過程
在完成對目標的對接任務完成后,通訊裝置發出指令,電機開始反轉。鎖緊指的收縮過程為伸張過程的逆過程;整個上對接裝置開始帶動鎖緊腳上升,當鎖緊腳與鎖緊孔完全分離時分離過程完成。至此,分離過程全部完成。
當電機反轉,各個動作為鎖緊指伸張的逆過程,直到回到初始位置,為下一次對接作好準備,且上對接裝置的4個對接腳還可以用作于飛行單元的支撐。
2.3.2電機選取
步進電機是現階段小型化控制模塊普遍采用的動力裝置,相比早期使用的三相異步電機等動力裝置,步進電機在可靠性、成本、啟停及反轉響應等方面更有優勢,而且近年來電機技術發展迅速,電機的功率類型越來越多、轉速的范圍越來越大,步進電機本身的特性(電機響應僅由數字輸入脈沖確定)使其成為未來發展的一個趨勢。
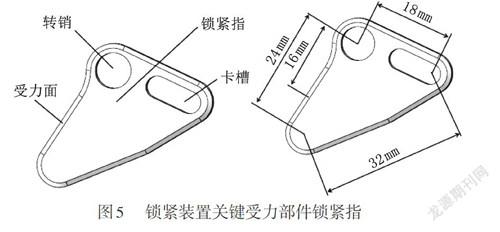
圖5所示為對接鎖緊的關鍵受力部件鎖緊指,電機作為動力源,電機的選擇主要根據受力件的負載大小來進行選擇。本文依據對接鎖緊裝置整體的空間占比及飛行單元所需承擔負載的需求選取42系列的絲桿伸出長度為80mm的步進電機,考慮到精度、鎖緊圓盤的上、下移動距離(32mm),決定采用轉速400r/min、導程2mm的42直線式滾珠絲桿步進電機,然后通過求靜轉距確定選取的型號。
通過查取42系列直線式絲桿步進電機的相關參數,根據靜轉矩的不同選取不同的機身長,從而確定其電機型號。因此,本論文選取機身長為44mm、型號為42BYGH442直線式絲桿步進電機。
3鎖緊指的有限元分析及鎖緊裝置的動力學仿真
3.1單元類型及材料參數選取
結合指標性要求與經濟成本原則,本文決定采用AL6061鋁合金材料,該材料具有的相關參數如表3所示。該材料在保證強度的情況下,因其輕盈的特點可以極大地減少飛行單元的負載,從而確保多旋翼的空中飛行工作時長;焊接性能優良且本身屬于常見的非標材料之一能夠極大地減少制造成本;耐腐蝕性好,經過冷處理后的硬度可達HB150,可以保證在多次鎖緊、分離中減少磨損。因此,本文的鎖緊裝置決定采用AL6061材料。
對接鎖緊裝置的快速對接、分離、鎖緊過程是通過鎖緊指與鎖緊殼的連接來實現的鎖緊指及鎖緊殼為其主要受力件,考慮到鎖緊指為主運動件,因此,本文僅對關鍵零部件鎖緊指進行有限元分析。本文通過Solidworks軟件對主受力件鎖緊指進行三維實體建模,通過x_t格式導人到有限元分析軟件AN-SYS Workbench中,選用8節點的SOLIDl85實體單元來定義,確保單元具有超彈性、應力鋼化、蠕變、大變形和大應變的能力。
3.2網格劃分及邊界條件
3.2.1網格劃分
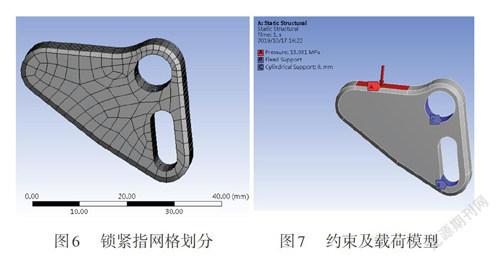
鎖緊指的實體單元形狀取六面體,對單元進行網格劃分,將整個實體劃分成最小單元,且各個單元間具有公共節點。整個鎖緊指劃分為5441個節點,980個單元,如圖6所示。
3.2.2邊界條件
根據對接鎖緊件的工況,在鎖緊指的轉銷處定義旋轉約束,僅保留ROXZ方向的轉動自由度。考慮受力工況下,卡銷處于卡槽最下端,本文僅考慮鎖緊指本身強度特性,因此對鎖緊指卡槽的最小端處定于全約束。
因對接鎖緊裝置需要負載整個箱體以及乘客的質量400kg,整個對接裝置所負載的工作阻力是4000N,每個對接腳(鎖緊裝置)的工作阻力為1000N,即每個鎖緊指對應的工作阻力為333.3N(已知工作阻力333.3 N和初始受力面面積0.025776m2,根據壓強公式P=f/s可得受力面所受的初始面壓力為12930.6Pa),即每個鎖緊指所受的面壓力載荷是12930.6Pa。得到的載荷和約束模型如圖7所示。
3.3有限元結果分析
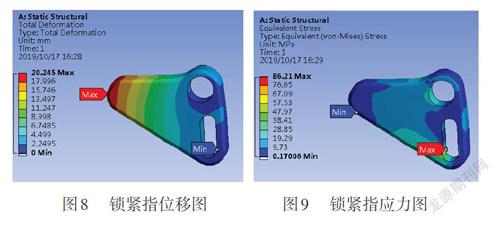
鎖緊指作為鎖緊裝置的主要受力件,其力學性能影響整個鎖緊裝置的工作。本章基于ANSYS Work-bench軟件對鎖緊指進行有限元分析,從而確定鎖緊指的相關尺寸參數,分析得到的關鍵零部件鎖緊指的應力和位移如圖8~9所示。
由圖可以看出,當受力面受到12930.6Pa的面壓力時,最大等效應力為86.21MPa,位于鎖緊指與鎖緊盤聯接的邊緣處。可見,對于主要受力件鎖緊指,當受力面負載對應的面壓力的工況下,通過力矩平衡原理可知受力件的卡銷至卡槽的最下端時的卡槽邊緣是主要的承載部位,主要用于鎖緊裝置中鎖緊指與鎖緊殼的鎖緊。鎖緊指材料為鋁合金AL6160,最大等效應力小于材料的屈服極限,且卡銷與卡槽連接處的抗拉強度小于材料的抗拉強度極限,因此,受力件鎖緊指滿足材料的屈服強度和抗拉強度要求,處于安全范圍內且偏于安全。位移最大值20.245mm位于受力面的左邊緣倒角處。可知,在受力面負載對應的面壓力的工況下,受力件鎖緊指的受力面的邊緣處會出現較小的下移,此位移不影響整個對接鎖緊裝置的穩定性及可靠性。因此,此對接鎖緊裝置的選用材料滿足此設計要求,可實現受力件鎖緊指與鎖緊殼的穩定、可靠連接。
3.4鎖緊裝置的動力學仿真分析驗證
將對接裝置的鎖緊、分離過程利用Solidworks軟件進行仿真,驗證其對接、分離過程的可行性。給定初始條件:鎖緊裝置偏移垂線較小角度5°,水平誤差不考慮(通過系統中位置校正裝置消除),引力加速度數值等于重力加速度9.8m/s2,方向豎直向下,定義鎖緊裝置與鎖緊殼內表面實體接觸。仿真開始時,鎖緊裝置的鎖緊腳在初始條件下由于重力作用沿導引面勻速向下移動,直至鎖緊裝置與鎖緊孔完全接觸,鎖緊裝置電機開始驅動,通過鎖緊指的收縮、伸張實現鎖緊腳與鎖緊孔的鎖緊。其分離過程是其鎖緊過程的逆過程。截取整個過程的幾個關鍵狀態如圖10所示。
由圖可知,鎖緊裝置在給定的初始條件下,對接腳與對接孔能實現精確對接和分離。同時通過導引面的設計、導向作用減少了對接過程中所產生的撞擊,且其導向面的設計有效減少了分離過程中可能出現的卡死現象。
4結束語
本文結合POPUP旋轉對接技術及國內外相關對接技術,設計了一種滿足指標性、功能性要求的對接鎖緊裝置。以三維實體模型為基礎,介紹了整體結構的工作原理和工作過程,描述了電機的選取及材料選取的過程,通過對裝置關鍵零部件的有限元分析確定了整個裝置的相關尺寸,確保其屈服強度極限和抗拉強度極限滿足材料屬性要求。除此之外,本文對對接鎖緊裝置進行了動力學仿真,驗證了設計的可實現性。結果表明,此對接鎖緊裝置的可靠性得到了提高,要求精度滿足了設計需求,允許了存在的水平誤差及角度誤差,輕量化、空間占比、冗余度等綜合性要求也得到了提高,說明了本設計的可行性及有效性。此外,本研究為鎖緊、分離裝置原理樣機的加工提供了可靠的理論依據,同時也為該裝置的后續相關研究提供了重要的依據。
