繩索驅動型擬人機械手運動仿真
2021-09-10 07:22:44黃廣偉陳浩華趙天嬋張攀峰
機電工程技術 2021年2期
黃廣偉 陳浩華 趙天嬋 張攀峰

關鍵詞:繩索驅動;擬人機械手;運動仿真
0引言
為滿足肢體缺陷的人群對高仿真性且具有靈巧性的假肢或者替代人手執行危險工作的需求,諸多學者對擬人機械手進行了研究。宋釗杰、韓建海等通過基于仿生學相關理論提出了一種氣壓驅動扇形柔性關節仿人機械手;李紅淵研究了一種基于Ar-duino語音控制的五指靈巧手,該研究主要針對于擁有說話能力的肢體缺陷人群,通過語音控制實現對目標物體的抓取;美國麻省理工學院和猶他大學聯合研發了Utah/MIT擬人手;美國斯坦福大學研制了Stanford/PL擬人手;Huagen Wan等對手的外觀做了細致紋理修飾,使其更逼真,并構建了幾種抓取手勢。
在諸多復雜抓取環境下,擬人手要成功抓取不同尺寸和形狀的物品是較為困難的,為克服該缺陷,本文設計了一款在形態和功能上都與人手相近的繩索驅動型擬人機械手,并運用SolidWorks的Sim-ulaition插件以及ADAMS進行運動仿真。從仿真的結果來看,各個手指的指尖均出現速度、加速度跳變的情形,為了使擬人手的指尖從起始端到末端運動平穩,擬人機械手加減速的控制方法宜采用s型速度曲線控制算法,以有效解決機械手的速度、加速度跳變問題,優化各手指的整體運動形態的連貫性以及平滑性。
1擬人機械手總體結構設計
通過對人手結構人體工學的探索,合理簡化了手部的自由度,人手是一個多肢節體系,大致包含手臂、手指、手掌和手腕4大部分。以人手結構為基礎,結合人手部的實際及理論尺寸,運用Solid-Works構建了繩索驅動型擬人機械手的三維模型,其總體結構如圖1所示,包括前臂、手腕、手掌、手指部分(拇指、食指、中指、無名指、小指)。
2擬人機械手運動學數學方程建立
2.1運用D-H參數法建立坐標系
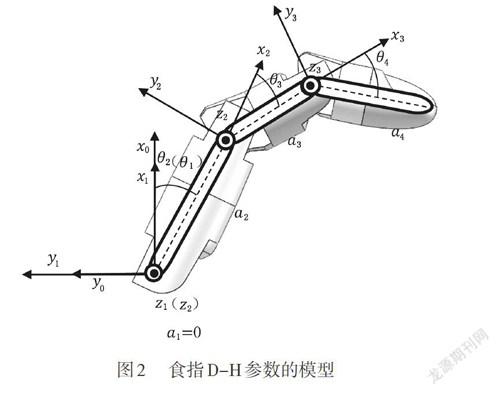
本文選用了食指為例進行分析,利用D-H描述法可得到其等價的D-H參數模型如圖2所示。
2.2建立運動學方程
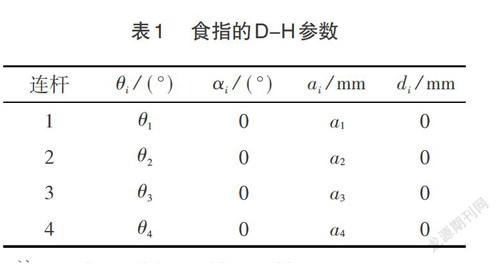
食指指節之間的坐標變化可以通過齊次坐標變換求出,兩相鄰指節坐標系間的齊次坐標變換矩陣如下式所示:
將表1中的參數代人式(1)中,則可求出各個坐標系的齊次坐標變換矩陣,如式(2)~(5)所示。
3擬人機械手的運動仿真
為了準確掌握五根手指指尖相對于掌心的運動軌跡、運動速度、運動加速度等變化規律,運用AD-AMS軟件對擬人機械手進行了運動仿真。
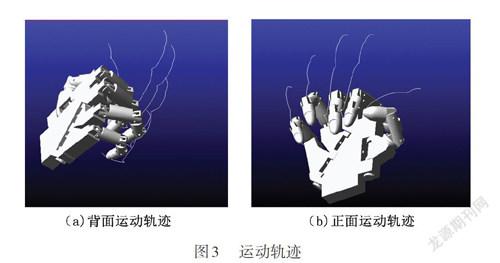
3.1運動軌跡
本文運用ADAMS軟件在重力的作用下進行仿真分析。首先運用ADAMS插件Simulation仿真后獲得擬人機械手動畫界面;其次在動畫界面中添加各個手指的指尖運動軌跡的追蹤器;最后生成五根手指的指尖運動軌跡如圖3所示。
3.2運動速度、運動加速度
擬人機械手的運動形態受多種因素影響,為簡化分析過程,現選取各手指的指尖運動速度、運動加速度進行研究,分析其在沒有繩索牽引約束情況下的指尖運動特性,為優化繩索驅動型機械手控制策略提供參考依據。
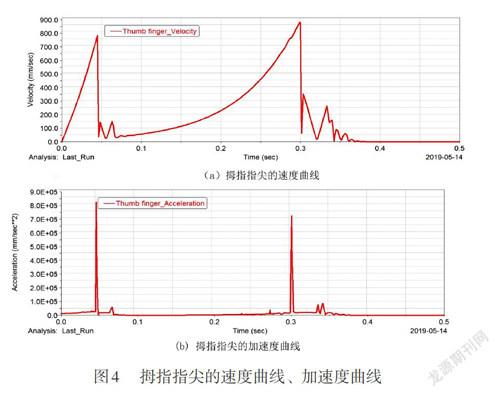
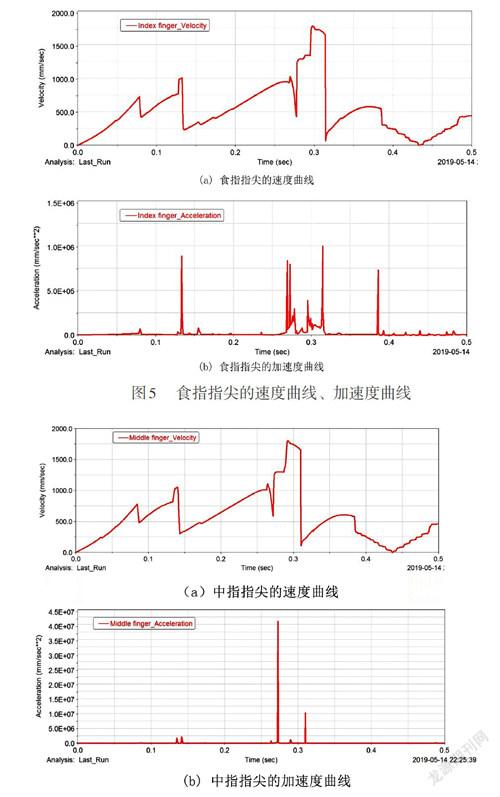
運用ADAMS插件Simulation生成五根手指指尖相關參數的Plot圖解,根據Plot圖解進行運動速度、運動加速度分析。可得出在一定時間內,拇指、食指、中指、無名指、小指相對于掌心的速度曲線、加速度曲線分別如圖4~8所示。
由圖4中可以看出,在0~0.5 s時間內,拇指指尖速度、加速度在0.05~0.1 s、0.2~0.3 s、0.3~0.4 s內有較小幅度跳變,變化較為平滑。而在0.05 s和0.3s時刻均出現了跳變,速度和加速度雖然連續,但不平滑。
由圖5中可以看出,食指指尖在0.13s、0.27s、0.28s、0.3s、0.32s時刻出現速度和加速度的跳變。特別地,在0.27~0.28s短時間內出現2次跳變。
由圖6中可以看出,中指指尖在0.07 s、0.12 s、0.13 s、0.24 s、0.28 s、0.32 s時刻出現速度和加速度的跳變,0.28 s、0.32 s時刻跳變程度遠大于其他時刻。
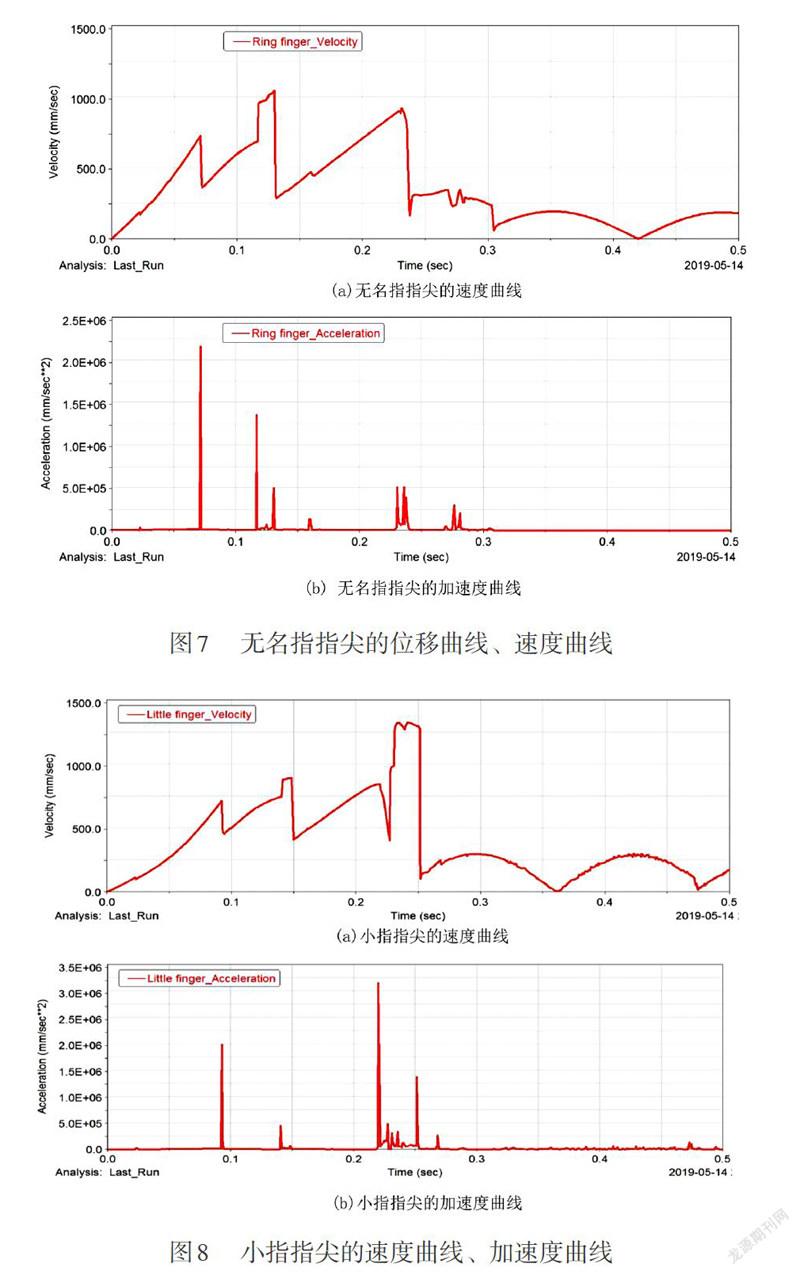
由圖7中可以看出,無名指指尖在0.07 s、0.12s、0.13 s、0.24 s、0.28 s時刻出現速度和加速度的跳變,且0.07 s、0.12 s時刻跳變較其他時刻大。
從圖8中可以看出,小指指尖在0.09 s、0.14 s、0.22 s、0.25 s時刻出現速度和加速度的跳變,其中0.09 s、0.22 s、0.25 s跳變幅度較其他時刻大。
綜合分析圖4~8所示的速度、加速度曲線,可以看出,啟停時刻存在慣性力,勢必會對擬人手本體造成沖擊。此外,在運動過程中,各手指的指尖均出現速度、加速度跳變的情形,這樣可能會導致手指的各個關節之間出現沖擊或不可預料的振動,影響擬人手的工作質量和工作壽命。基于此,為了使擬人手的指尖從起始端到末端運動平穩,需要重點分析各手指指尖速度和加速度的跳變時間段和跳變程度,以對相應的過程進行加減速控制,從而達到各手指運動平穩的效果。
常用的加減速控制算法有梯形速度曲線控制算法、s型速度曲線控制算法、正弦加減速曲線控制算法。通過比較,s型速度曲線控制算法能夠在不同階段實現速度銜接平滑,能有效解決機械手的速度、加速度跳變問題,優化了各手指整體運動形態的連貫性以及平滑性。
4結束語
本文運用SolidWorks構建了擬人機械手的三維模型,使用ADAMS構建了虛擬樣機并生成各手指的速度曲線、加速度曲線圖。通過對各手指指尖相對于掌心的速度曲線、加速度曲線圖對比分析可以看出,啟停時刻存在慣性力,運動過程中,各個手指的指尖均出現速度、加速度跳變的情形,為了使擬人手的指尖從起始端到末端運動平穩,擬人機械手加減速的控制方法宜采用s型速度曲線控制算法,以有效解決機械手的速度、加速度跳變問題,優化各手指整體運動形態的連貫性以及平滑性。此研究不僅能縮短物理樣機的創建周期,還為優化物理樣機設計和控制方案提供有價值的參考依據。
