無人船載設備雙軸機械穩(wěn)定平臺速度前饋控制方法研究
2021-09-10 07:19:20俞華熊天武
機電工程技術 2021年2期
俞華 熊天武


關鍵詞:無人船;雙軸機械穩(wěn)定平臺;縱橫搖;速度前饋
0引言
艦船由于風浪作用會出現(xiàn)搖擺,引起船載設備如雷達天線的軸線晃動,影響對目標的掃描及測量。為了減小或消除船體搖擺對設備的影響,保證船載設備穩(wěn)定運行,常見的方法是采用機械穩(wěn)定方式,驅動機械穩(wěn)定平臺反向搖擺克服船體縱搖及橫搖影響,提供一個近似水平的工作平臺,從而隔離船體搖擺擾動對船載設備的影響。機械雙軸穩(wěn)定平臺能夠及時有效地隔離船體縱搖橫的影響,通過實時測量平臺位置信息調整姿態(tài),保證平臺空問穩(wěn)定,為雷達等艦載設備提供穩(wěn)定的工作平臺,應用廣泛。無人船由于體積小,船體搖擺更加劇烈,變化迅速,基于常規(guī)的PID控制算法的雙軸機械穩(wěn)定平臺不能滿足其快速變化動態(tài)性能和控制精度要求。本文基于雙軸機械穩(wěn)定平臺工作原理設計前饋-PID控制算法,在PID控制算法的基礎上,引入速度前饋,通過姿態(tài)測量模塊實時測量船體搖擺角度及角度變化速度,進行算法運算后驅動伺服機構動作,提高穩(wěn)定平臺控制系統(tǒng)的動態(tài)性能與穩(wěn)定平臺控制精度,保證無人船載設備穩(wěn)定工作。
1雙軸穩(wěn)定平臺工作原理
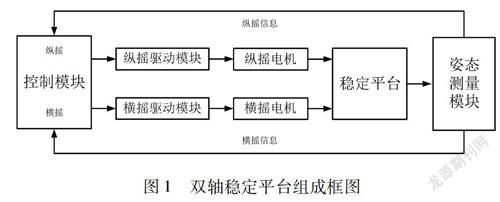
雙軸機械穩(wěn)定平臺主要由穩(wěn)定平臺(機械結構)、測量模塊(姿態(tài)測量傳感器)、執(zhí)行機構(縱橫搖力矩電機、驅動器)及控制系統(tǒng)等幾個主要部分組成。當船體發(fā)生搖擺,產(chǎn)生姿態(tài)角度變化時,姿態(tài)測量傳感器實時測量船體縱搖及橫搖角度,驅動縱搖電機及橫搖電機反向動作,實現(xiàn)穩(wěn)定平臺機械結構水平方向穩(wěn)定。穩(wěn)定平臺結構上采用外軸橫搖,內軸縱搖的安裝方式,姿態(tài)測量傳感器安裝在平臺底座上,實時測量船體姿態(tài)并將姿態(tài)信息送到控制單元進行控制運算。雙軸機械穩(wěn)定平臺組成框圖如圖1所示。
2雙軸穩(wěn)定平臺控制策略
2.1穩(wěn)定平臺解耦控制
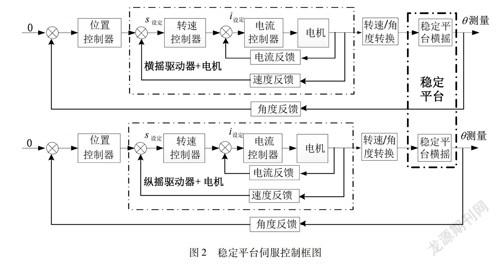
雙軸穩(wěn)定平臺控制策略采用解耦控制,根據(jù)實時測量的船體搖擺角度對穩(wěn)定平臺的縱搖模塊和橫搖模塊分別進行控制。在實際工作環(huán)境下,船體縱搖及橫搖對穩(wěn)定平臺的影響是相互耦合的,但在縱搖角或橫搖角逐漸向平穩(wěn)狀態(tài)(搖擺角度趨向于0)過度的過程中,其相互之間的耦合關系減弱,當其中某一個姿態(tài)(縱搖或橫搖角度)達到平穩(wěn)時,其耦合關系消除,因此,在對穩(wěn)定平臺進行控制算法研究時,可以忽略相互之間的耦合關系,對兩軸分別進行控制,其穩(wěn)定平臺控制框圖如圖2所示。縱搖及橫搖控制均采用三環(huán)控制策略,包括電流環(huán)、速度環(huán)以及位置環(huán)3個組成部分。電流環(huán)及速度環(huán)集成在電機驅動器模塊中,可以有效抑制伺服電機的非線性影響;位置環(huán)由控制模塊實現(xiàn),包括姿態(tài)測量模塊、編碼器及控制板,進行穩(wěn)定平臺姿態(tài)的檢測、運算與控制,實現(xiàn)穩(wěn)定平臺平穩(wěn)運行。
2.2 PID-前饋控制
PID控制算法是將比例、積分、微分幾個部分經(jīng)過組合構成被控對象的控制變量,其結構簡單、易于實現(xiàn)、且不需要被控對象的精確模型,因此被廣泛應用。但由于無人船體積小、搖擺幅度大、且搖擺頻率高,常規(guī)PID控制是基于偏差量的反饋控制,其本質決定了調節(jié)作用總是落后于干擾變化量,對于外界快速變化的干擾量調節(jié)能力較弱,不能滿足快速搖擺下的動態(tài)特性與精度要求,因此考慮加入速度前饋。前饋控制的特點是實時觀測或者測量干擾作用的大小,并根據(jù)測量到的干擾量對被控系統(tǒng)進行實時地調節(jié)和控制,能夠及時補償擾動對被控對象造成的影響。前饋控制要求干擾量是可測的,雙軸機械穩(wěn)定平臺的干擾量完全來自于船體搖擺,且搖擺變化量是實時可測的,因此可以基于姿態(tài)測量模塊實時檢測縱橫搖擾動變化量,建立前饋控制器補償船體快速晃動帶來的影響,提高平臺控制精度,保證船載設備穩(wěn)定高效的工作。
3仿真實驗和分析
實際工作過程中,橫搖擺動幅度大,對船體姿態(tài)影響劇烈,精度控制難度相對較大,縱搖相對影響較小,搖擺幅度小,因此在控制策略研究以及算法設計時主要針對穩(wěn)定平臺橫搖控制進行建模仿真及參數(shù)整定,縱搖采用與橫搖一樣的控制策略,控制器參數(shù)根據(jù)實際所選電機及減速器進行整定。雙軸機械穩(wěn)定平臺包含永磁同步電機(PMSM)、驅動器、減速器等非線性模塊,是典型的高階非線性系統(tǒng),為了降低難度,簡化控制器設計流程,對被控對象模型進行降階和線性化處理,簡化為典型的二階慣性環(huán)節(jié)。
基于MATLAB/simulink工具進行仿真建模,設計傳統(tǒng)PID與前饋-PID控制算法進行仿真實驗驗證,仿真模型如圖3所示,仿真結果分別如圖4~5所示。仿真模型輸入信號為模擬船體橫搖周期性運動的正弦信號,幅值15°,周期為2s。
由圖4~5正弦跟蹤控制誤差曲線及表1性能參數(shù)分析結果可知,前饋-PID控制算法能夠有效地根據(jù)測量的穩(wěn)定平臺干擾量(船體搖擺角度及角速度)對平臺姿態(tài)進行調節(jié),補償船體縱橫搖的影響,顯著提高控制精度,保持穩(wěn)定平臺水平穩(wěn)定,相對于傳統(tǒng)的PID控制算法具有更優(yōu)的動態(tài)性能以及更高的控制精度。
4結束語
本文研究了基于雙軸機械穩(wěn)定平臺的PID-前饋控制算法,并基于穩(wěn)定平臺的近似線性化的降階數(shù)學模型建立MATLAB/simulink仿真模型對設計的PID-前饋控制算法進行仿真試驗驗證。仿真實驗結果顯示,相對于傳統(tǒng)PID控制算法,前饋-PID控制算法具有較快的動態(tài)響應和更高的跟蹤控制精度,能夠有效補償船體搖擺對穩(wěn)定平臺帶來的影響,為工程應用奠定了基礎。
