輪轂電機電動汽車ASR仿真研究
2021-09-10 07:22:44劉晶晶唐陽山
內燃機與配件 2021年15期
劉晶晶 唐陽山
摘要:車輛在起步或加速時容易發生打滑,驅動防滑控制系統可將驅動輪的滑轉率控制在最佳范圍內,避免車輛打滑。文章根據驅動防滑控制原理,在simulink中建立了整車模型、電機模型和駕駛員模型,設計了驅動輪防滑控制器,并與carsim進行聯合仿真,仿真結果表明,所設計的驅動輪防滑控制器能夠有效控制滑轉率,防止汽車打滑。
Abstract: The vehicle is prone to slip when starting or accelerating. The driving Acceleration Slip Regulation control system can control the slip rate of the driving wheel in the best range to avoid vehicle slip. According to the principle of drive anti-skid control, the vehicle model, motor model and driver model are established in simulink. The anti-skid controller of drive wheel is designed and co-simulated with carsim. The simulation results show that the designed anti-skid controller of drive wheel can effectively control the slip rate and prevent the car from slipping.
關鍵詞:電動汽車;驅動防滑;滑轉率;聯合仿真
Key words: electric vehicle;driving anti-slip;slip rate;joint simulation
中圖分類號:U469.72? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)15-0007-02
0? 引言
電動汽車驅動防滑控制(ASR)系統主要是將驅動輪的滑轉率保持在適當的范圍內,使車輛即使在惡劣路面上仍具有較強的加速性能和行駛穩定性能[1],從而保證汽車行駛時的安全性。對于輪轂電機驅動的電動汽車,由于輪轂電機不僅具有響應速度快、控制精度高等優點,同時還可以獲取實時轉速和轉矩信息,在驅動防滑控制方面有著先天的優勢。所以針對輪轂電機驅動電動汽車的獨特優勢,設計了輪轂電機驅動防滑控制策略。
1? carsim建立整車動力學模型
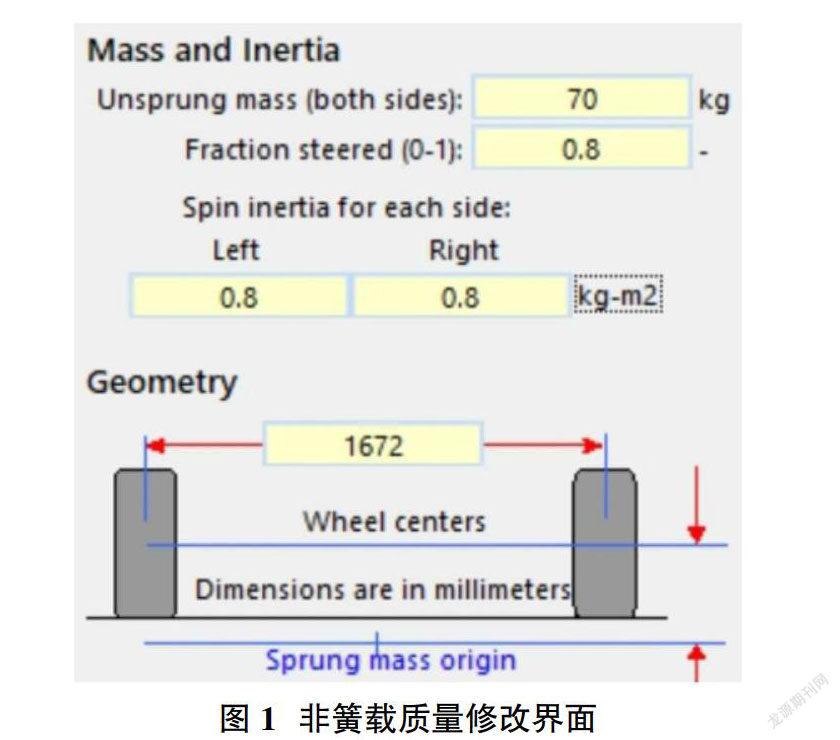
在carsim中選擇B-Class作為仿真用基準車,本研究為直線行駛的驅動防滑控制,所以carsim中的空氣動力學、轉向系統、制動系統均采用原B級車默認值,不做改變。修改動力傳動系統,將動力傳動系統改為四輪驅動(4-Wheel system),將內部動力輸入如發動機、差速器、變速器等全部改為外部輸入[2]。因為要將傳統車改為輪轂電機驅動的電動汽車,所以相應的增大非簧載質量和車輪轉動慣量,如圖1。
2? ASR控制系統模型
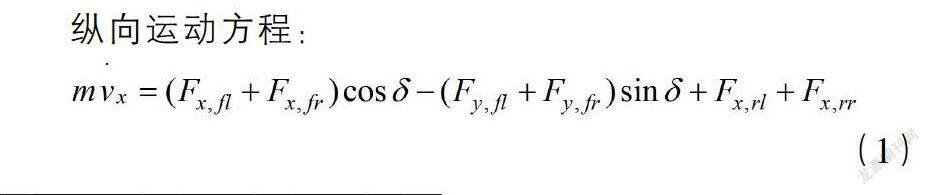
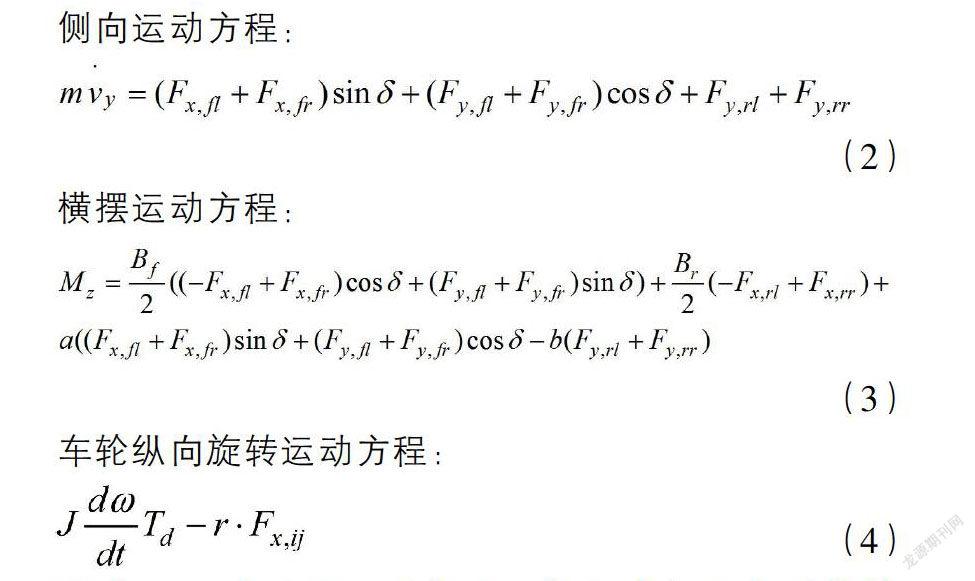
2.1 整車模型? 本文根據控制策略需要,建立整車七自由度模型。七個自由度分別為車身的縱向運動、側向運動和橫擺運動以及四個車輪縱向旋轉運動。對該模型做出如下假設:路面為水平路面;車輛坐標系原點與車輛質心重合;忽略車輛的垂直彈跳、俯仰運動和側傾運動;忽略空氣阻力和滾動阻力;左右輪轉向角始終相等[3]。
縱向運動方程:
側向運動方程:
橫擺運動方程:
車輪縱向旋轉運動方程:
式中,vx、vy為車輛行駛縱向、側向速度;δ為前輪轉角;Fx,ij、Fy,ij為各車輪的縱向力和側向力;Mz為繞Z軸的旋轉力矩;Bf、Br為前、后輪輪距;a、b為質心到前、后輪的輪距;J為車輪轉動慣量;ω為車輪轉速;Td為輪轂電機輸出的驅動力矩。
2.2 輪轂電機模型? 本文輪轂電機采用無刷直流電機,其數學表達式為:
式中:Ke為電動勢常數;Kt為轉矩常數。
2.3 駕駛員模型? 駕駛員模型是通過對駕駛員行為分析,建立相關模型來反映真實駕駛情況下駕駛員對車輛的操作[4]。根據本文控制策略需求,只建立簡單的速度跟蹤駕駛員模型,采用PI控制算法,輸入為目標車速與實際車速的差,輸出為駕駛員目標力矩。
3? 驅動輪防滑PID控制器
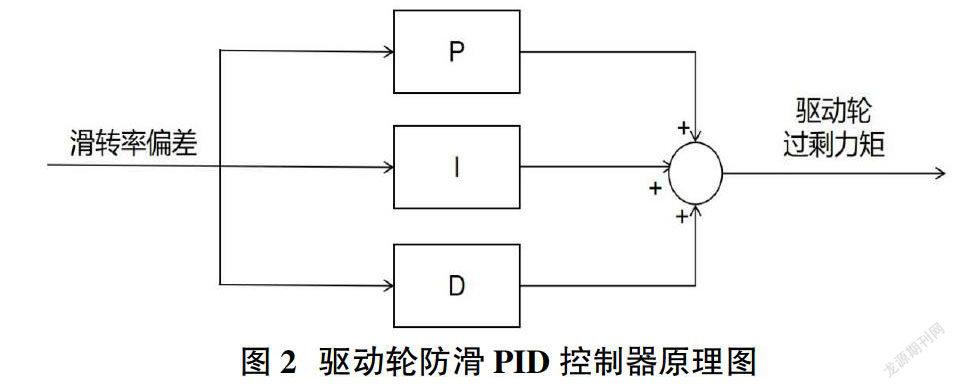
本文所設計的驅動輪防滑控制器根據PID控制原理,控制器輸入為驅動輪滑轉率偏差(實際滑轉率與最優滑轉率的差),輸出為驅動輪過剩力矩。通過調節合理的P、I、D的值,將驅動輪滑轉率控制到最優滑轉率附近。
驅動輪防滑PID控制器的原理圖如圖2。
4? carsim/simulink聯合仿真
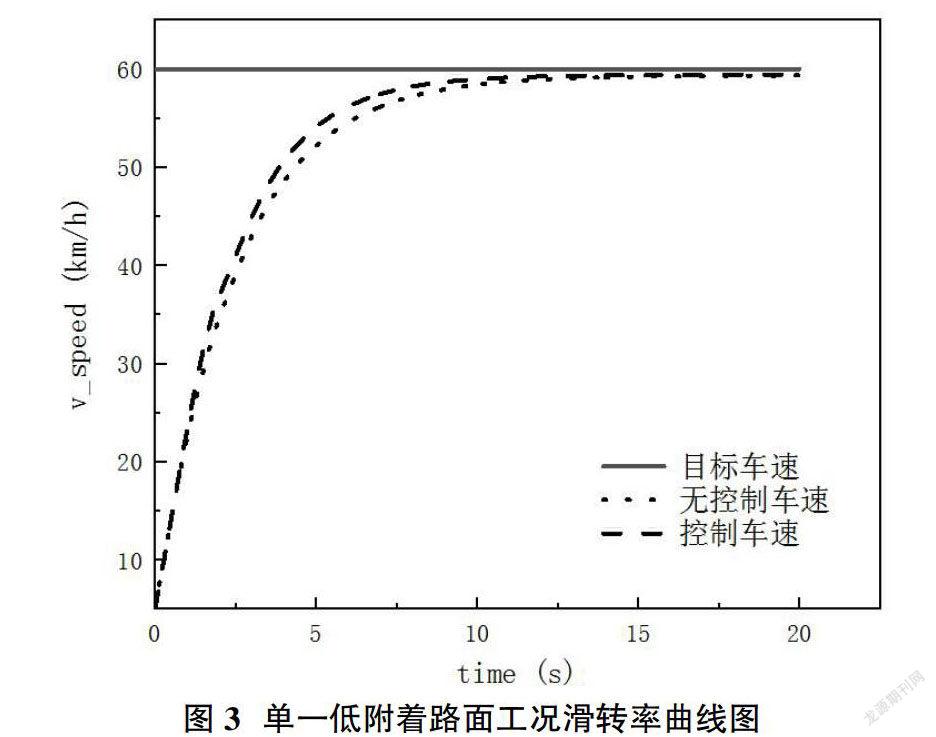
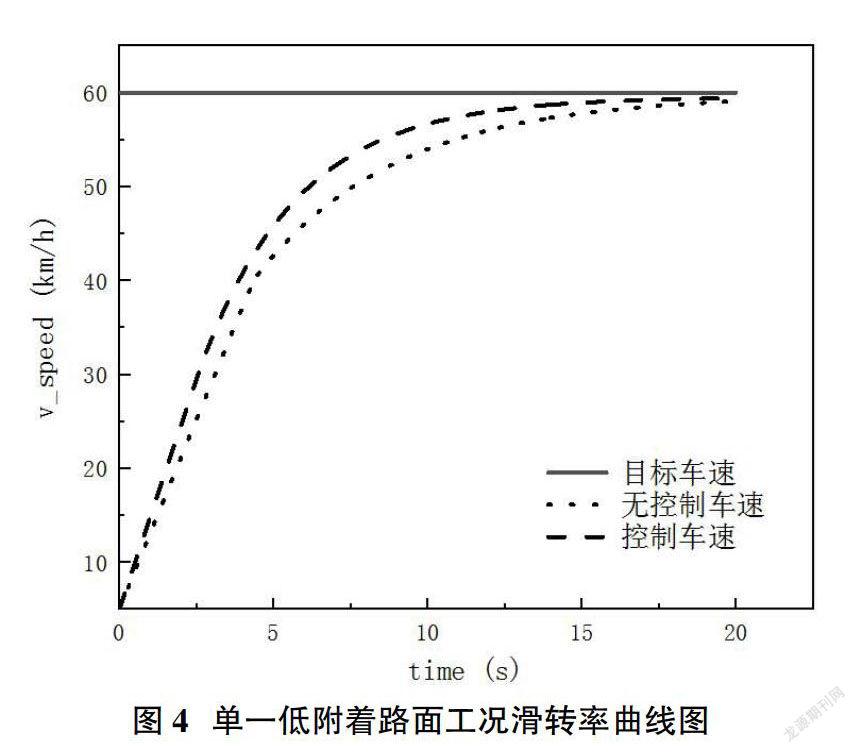
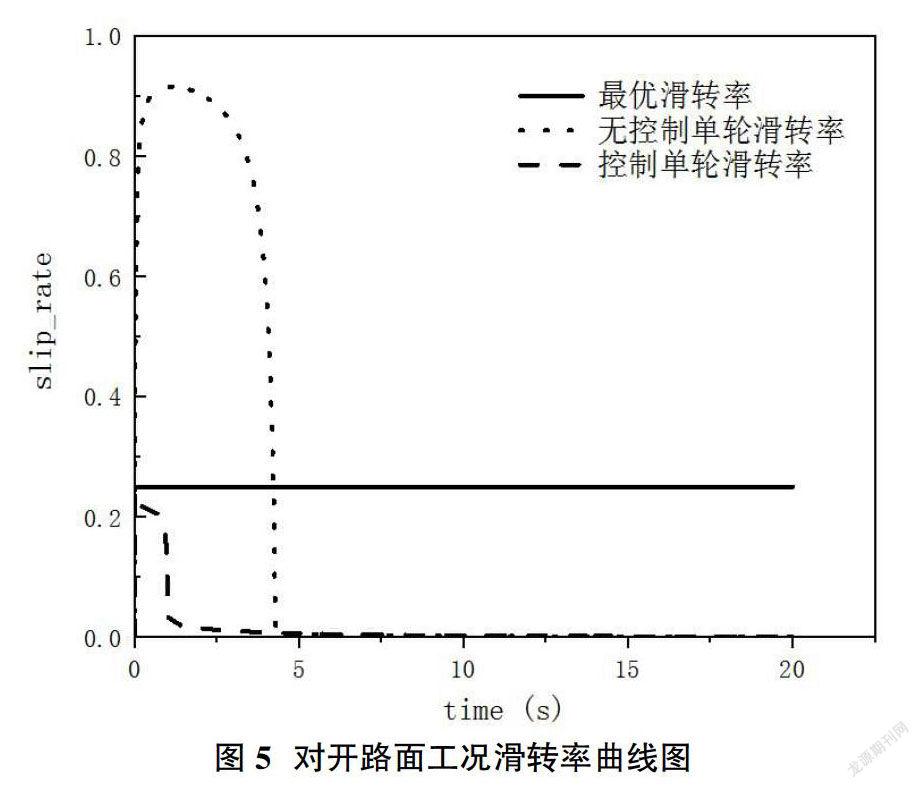
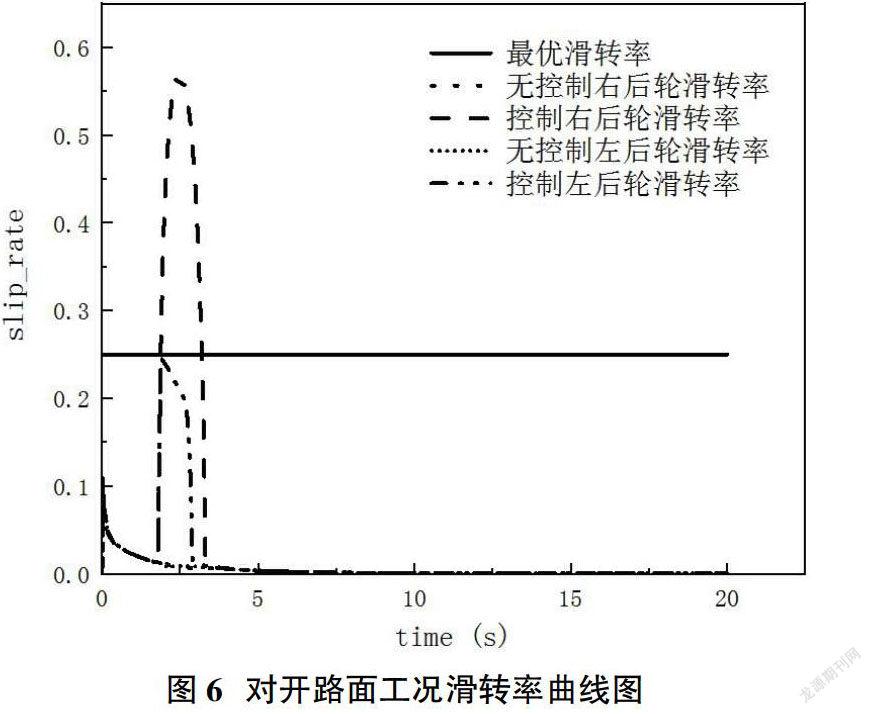
根據設計,將需要修改的參數輸入到carsim中,并在carsim中設置單一低附著路面仿真工況和對開路面仿真工況,與simulink中建立的模型聯合起來進行仿真。仿真結果如圖3-圖6。
由圖3-圖6曲線可以看出,加入驅動防滑控制后車輛跟隨效果更好,車輛加速效果更好,滑轉率也有明顯下降,控制策略具有一定作用。
5? 結論
汽車起步或加速行駛時,若駕駛員踩踏板的開度很大,會給車輛很大的駕駛員需求力矩,車輛則會發生打滑現象,尤其是在冰雪路面。裝了驅動防滑控制系統的汽車可以很明顯的降低車輛驅動輪的滑轉率,提高加速性能,提高車輛行駛的安全穩定性與動力性。
參考文獻:
[1]喻凡,林逸.汽車系統動力學[M].北京:機械工業出版社,2016(9):130.
[2]馬高峰,李剛,韓海蘭.基于CarSim的四輪輪轂電機電動汽車建模方法研究[J].農業裝備與車輛工程,2015,53(07):8-11.
[3]Tian Hao. Research on Anti Slip Control of Wheel Motor Vehicle Drive[D]. Jilin: Jilin University, 2000:13.
[4]靳彪,張欣,彭之川,等.四輪輪轂電機驅動電動汽車建模與仿真[J].中國公路學報,2016,29(4):138-144.