一種快速響應型小衛星的自主任務規劃設計與應用
2021-09-11 01:38:32崔本杰陳占勝
上海航天 2021年4期
范 凱,崔本杰,陳占勝,成 飛
(上海衛星工程研究所,上海 201108)
0 引言
隨著航天技術的快速發展,衛星在軌工作模式向智能化、自主化運行方向發展[1]。國內外相繼開展了衛星自主任務規劃技術的研究。美國國家航空航天局(NASA)在地球觀測衛星(EO-1)的基礎上,先后開發了“自主調度與規劃”“調度和執行程序框架”兩型衛星任務規劃系統[2]。歐洲航天局(ESA)也支持了星載自主規劃技術[3]。在規劃算法方面,GRASSET-BOURDEL 等[4]研究了基于約束規劃模型的回溯式啟發式算法,該算法復雜度較低。SARKHEYLI 等[5]在研究低軌道衛星任務規劃時,將任務優先級、資源約束和用戶滿意度納入考量因素,設計了一種新的禁忌搜索算法進行求解。劉嵩等[6]基于任務規劃過程的多種約束進行數學建模,針對該模型提出一種滾動規劃啟發式算法,將一次的全局任務規劃過程劃分為連續多次的局部規劃。何永明等[7]給出了一種星上自主任務規劃系統的設計方案,包括星上和地面系統,分別實現不同的功能并協同完成某些復雜任務。薛志家等[8]提出了一種啟發式搜索與改進的突發性任務自主規劃方法,完成目標任務所需的時序規劃。楊正磊等[9]針對應急條件下成像衛星任務規劃問題,建立了單任務綜合規劃模型,綜合考慮了任務規劃過程中衛星、測控及數傳資源的分配。徐崇彥等[10]將衛星使用約束抽象為規劃規則,設計了靈巧衛星啟發式任務規劃算法。以上研究在學術上均做出了一定的探索工作,但未做工程實現。在工程實踐上,中國空間技術研究院在高分三號(GF-3)衛星上開展了自主任務規劃及在軌驗證,提出單次記錄、單天線單站邊記邊放、單天線雙站邊記邊放等9 種自主任務規劃編排指令模板[11]。李德仁等[12]介紹了珞珈一號01 星夜光遙感設計與處理,實現了全國夜光一張圖任務規劃。余濤等[13]介紹了“天平”一號衛星提出了標校衛星任務規劃方法,對精密定軌調度和標校數據處理業務流程進行了分析設計。以上衛星各具特點,但都針對特定任務,為基于地面上注任務的星上自主任務規劃。
浦江一號衛星相比上述衛星,在星上實時引導成像自主任務規劃做出了技術探索和在軌驗證,是一顆快速響應型試驗小衛星,于2015 年9 月25 日成功發射,衛星質量347 kg,運行在軌道高度約481 km的太陽同步軌道[14]。衛星有效載荷包括電磁信號監測、光學成像和星載圖像處理,其中,電磁信號監測載荷實現對星下半錐角30°視場范圍的電磁輻射信號的接收與定位,并用于引導相機成像;光學成像為離軸三反時間延時積分電荷耦合器件(Time Delay and Integration Charge Coupled Devices,TDI/CCD)線陣相機,采用一維機構驅動擺鏡快速指向目標區域并進行可見光成像,地面成像分辨率優于3 m,相機瞬時成像幅寬24 km,掃描幅寬550 km;星載圖像處理載荷實現對目標的快速自主識別、高精度定位。衛星自主任務規劃軟件、數管軟件、姿軌控軟件等共同運行于綜合電子計算機,依托星上P1750處理器有限的處理資源,具備在軌多目標自主引導成像任務規劃能力。本文介紹了浦江一號衛星自主任務規劃的設計、測試及在軌應用情況。
1 自主任務規劃設計
1.1 自主成像任務規劃設計
1.1.1 自主成像任務規劃工作原理
傳統的衛星成像任務規劃主要由地面管控實現,在地面確定成像區域、進行軌道遞推、協調資源沖突、解算成像任務執行參數等,生成程控作業指令鏈,在衛星過境時上注星上。因星地鏈路無法實現全時互通,傳統做法無法應對在軌實時新發現的目標,對地面管控支持依賴度較高,不適應日益增長的衛星應用便捷性、高時效性需求。
浦江一號衛星采用的星載電磁環境監測與光學成像自主任務規劃技術,將地面管控功能高效地移植到星上,根據電磁環境監測載荷搜索范圍大的特點對目標進行初定位,或根據地面實時上注的成像區域的定位信息,結合衛星當前軌道、姿態、載荷指向與調整方式等信息,星上實時接收電磁監測載荷的目標引導隊列,進行目標優選,高精度求解相機擺鏡指向與成像觸發時刻,及時生成平臺與載荷工作指令鏈,引導相機對優選目標成像。
浦江一號衛星在目標進入視場被載荷發現,到相機對目標推掃成像,一般不到30~60 s,星上需要在短時間內完成目標信號識別定位(2 s)、目標隊列短時積累(5 s)、目標優選及星上引導計算(0.10 s)、擺鏡指向調整(4 s)、偏流角精修調整(20 s),并在飛鄰目標上空前5 s 開始成像,獲取10 s 圖像。針對實時性的目標引導成像任務,目標搜索及引導成像可視范圍不斷向前推進,短時最優并不代表全局最優,星上采用貪婪策略對不斷滾動推進的局部視場中的目標進行快速優選,通過以下措施優選目標:1)裝訂信號庫,做重點目標篩選;2)對積累的多個目標按優先級排序;3)多目標可見性計算,得到時間-擺角信息;4)采用貪婪算法確定滿足時間約束及擺角切換約束的目標。
自主任務規劃技術工作原理如圖1 所示。
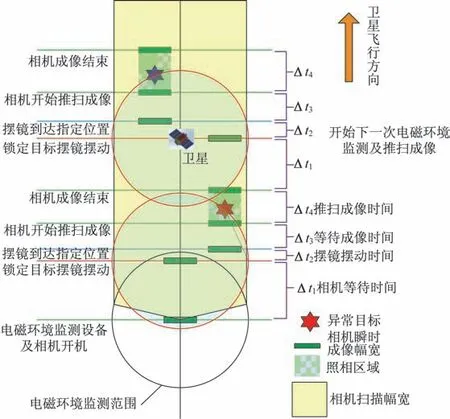
圖1 浦江一號衛星自主成像任務規劃工作原理Fig.1 Principle of autonomous imaging mission planning for PJ-1 satellite
1.1.2 自主成像任務規劃工作模式
浦江一號衛星自主任務規劃根據載荷特點及平臺能力,設計了三種工作模式,分別為詳查引導成像模式、快速引導成像模式、姿態機動引導成像模式。其中,前兩種模式通過相機擺鏡機構完成成像視場調整,后一種通過衛星姿態機動完成成像視場調整。衛星自主任務規劃工作場景如圖2 所示。
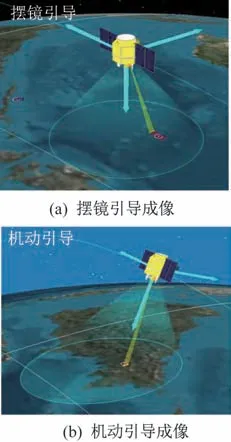
圖2 引導成像示意圖Fig.2 Schematic diagram of guiding imaging modes
1)詳查引導模式。由相機的滾動軸擺鏡機構完成成像視場調整,實時進行成像點偏流角修正,盡可能地提供引導區域的清晰圖像,由姿軌控修正擺鏡擺角變化引起的偏流角偏差,具備多區域引導成像能力。
2)快速引導模式。由相機的滾動軸擺鏡機構完成成像視場調整,僅修正星下點偏流角。相比詳查模式,雖然大角度的成像質量稍有降低,但節省了偏流角精修的時間,盡可能地擴大了可引導成像的區域,提高了成像概率。
3)姿態機動引導模式。主要基于擺鏡機構單點故障而設計。可在擺鏡故障時,通過姿態機動代替擺鏡調整成像視線指向,視線引導姿態機動,對自主任務規劃的整個流程進行驗證,如圖3 所示。

圖3 工作模式時序圖Fig.3 Sequence diagram of operation modes
為實現衛星高速運動時多目標連續引導成像,兼顧偏流角修正保證圖像清晰,設計了基準姿態角、基準擺角、擺角控制量作為模式調控因子,確保圖像清晰,成像又快又穩。成像任務規劃、偏流角計算與控制的調控因子關系如圖4 所示。
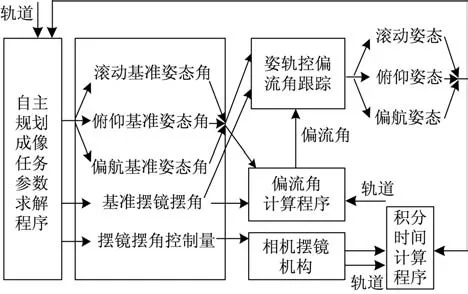
圖4 軟件信息流Fig.4 Software information flow
1.1.3 自主任務規劃的信息流設計
浦江一號衛星自主任務規劃涉及了平臺的綜合電子、全球定位系統(Global Positioning System,GPS)、姿軌控等功能模塊,以及電磁環境監測、相機、圖像處理三型載荷,信息流主要通過1553B 總線、RS422、綜合電子公共數據區、SpaceWire 等形式傳輸。信息流輔助完成的主要功能包括主任務規劃、姿軌控模式調控與偏流角跟蹤控制、電磁環境監測定位、GPS 信息傳輸、相機偏流角、積分時間計算與成像控制、圖像處理載荷精確定位、相機與圖像處理載荷圖像數據傳輸、高程檢索等。成像任務自主規劃信息流如圖5 所示。
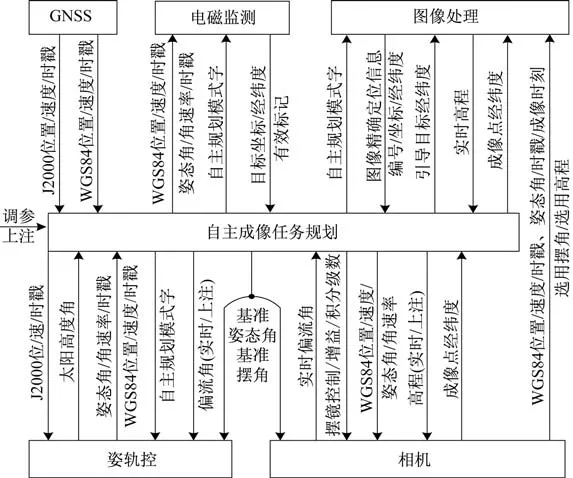
圖5 自主任務規劃信息流Fig.5 Autonomous task planning information flow
1.2 自主運行任務作業實施設計
為了解決衛星應答機故障或者星地測控無法保障時衛星失效問題,衛星通過判斷未收到地面上行控制作業時長,判斷衛星升降軌、衛星經緯度,在上述3 個條件均滿足的情況下通過計算機程控方式實施有效載荷作業和數傳作業。
1)衛星未收到地面上行控制作業時長判斷。在綜合電子計算機數據管理軟件內部設置一軟時鐘,在執行完末次地面上行控制作業后開始計時。如果計時達到既定時長,則執行衛星升降軌的判斷和衛星當前位置的判斷;計時達到既定時長,且衛星升降軌和當前位置均滿足條件時,衛星綜合電子計算機數據管理軟件發出有效載荷作業和數據傳輸作業的程序控制指令,作業完成后計數器清零并開始重新計數;如果計時過程中未達到既定時長時收到地面上行控制作業,則計數清零。
2)衛星升降軌的判斷。衛星升降軌根據衛星軌道幅角進行判斷:軌道幅角0°~90°、270°~360°區間為衛星降軌,軌道幅角90°~270°區間為衛星升軌。
3)衛星星下點位置的判斷。設置降軌執行任務判斷區(經度范圍En1~En2,緯度范圍Nn1~Nn2,單位均為°),當衛星星下點經度在En1~En2 之間、緯度在Nn1~Nn2,且衛星為降軌時,則自動執行任務。
設置升軌執行任務判斷區(經度范圍En3~En4,緯度范圍Nn3~Nn4,單位均為°),當衛星星下點經度在En13~En4 之間、緯度在Nn3~Nn4,且衛星為升軌時,則自動執行任務。
衛星降軌時星下點執行作業判斷區,經度范圍130°~145°,緯度范圍65°~70°,當衛星星下點經度和緯度在該區域內,且衛星為降軌時,則衛星自主實施有效載荷和數據傳輸作業。衛星升軌時星下點執行作業判斷區,經度范圍120°~135°,緯度范圍-5°~0°,當衛星星下點經度和緯度在該區域內,且衛星為升軌時,則衛星自主實施有效載荷和數據傳輸作業。衛星在軌自主實施作業任務的判斷區域示意圖如圖6 所示。
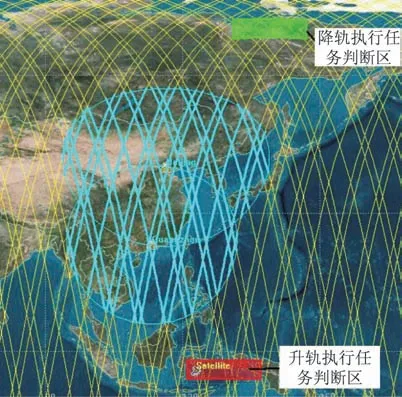
圖6 衛星在軌自主實施作業任務的判斷區域示意圖Fig.6 Schematic diagram of the judgment area for the autonomous operation of the satellite on orbit
2 自主任務規劃地面驗證
2.1 地面測試系統
衛星自主規劃設計的地面試驗驗證,是在軌成功應用的關鍵所在,飛機搭載試驗與地面車載試驗成本高、操作繁瑣,同時星地相對運動關系由于速度、大氣、姿態測量、穩定性等極難貼近真實狀態,不具備驗證可行性。設計了測試數據實時驅動STK 軟件場景的測試驗證系統,如圖7 所示。基于C++語言開發,以整星測試遙測數據與姿軌控動力學數據,實時驅動視景仿真計算機,充分利用STK 軟件中的矢量運算功能,通過比對視景仿真中可視化的衛星位置、姿態、擺鏡位置、視軸與地面目標相對關系,通過場景反演的偏流角等相關信息,與設計值進行一致性比對。目標數據采用電磁環境監測單機模擬或采用地面上注方式。

圖7 自主任務規劃測試系統連接圖Fig.7 Connection diagram of the autonomous task planning test system
2.2 地面測試數據
在衛星研制過程中進行了自主任務規劃功能測試,驗證了自主任務規劃算法正確性,相機偏流角、積分時間算法正確性,圖像處理載荷高程查找正確性,GPS信息源、姿軌控跟蹤偏流角正確性,姿軌控WGS84數據正確性,引導輸出擺角控制信息和成像時序等。
以整星真空熱試驗過程中的自主任務規劃作業為例,熱平衡高溫工況、熱真空試驗高低溫保持期間共執行9 次自主任務作業18 個成像目標,18 個目標分布在南北半球太陽照區,如圖8 所示。
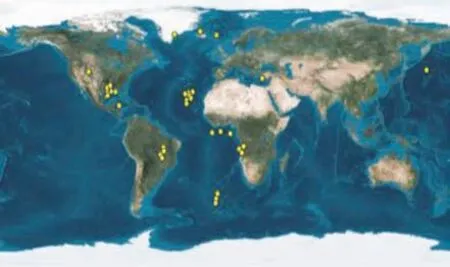
圖8 測試用例目標位置示意圖Fig.8 Target coordinates for the test
根據自主任務規劃的求解與執行結果,對計算誤差、引導指向誤差進行了統計,見表1。計算誤差是指在成像時刻、理想姿態、擺角控制準確、無軌道誤差情況下,星上自主規劃核心算法輸出的求解結果經過地面高精度遞推模型后,相機CCD 成像中心點與目標坐標的誤差。引導指向誤差是指在計算誤差基礎上,疊加姿態控制誤差、擺鏡指向控制誤差等的因素,相機實際成像中心點與目標量測位置的誤差。
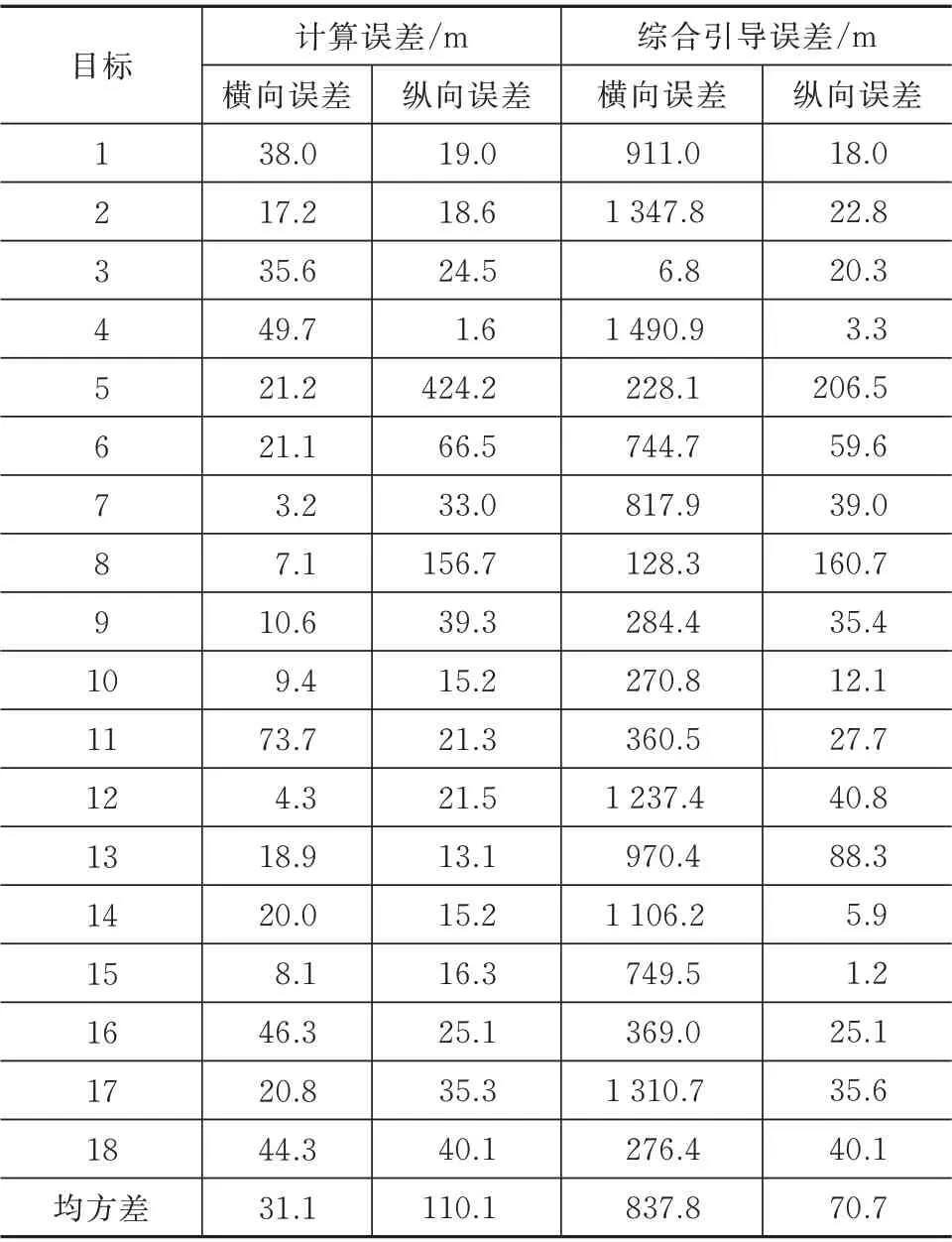
表1 計算誤差與綜合引導誤差結果Tab.1 Results of calculation errors and integrated guidance errors
采用廠房測試的計算結果遙測、擺鏡擺角遙測、三軸姿態角遙測等,進行事后數據分析,得到表1的結果。可見綜合解算橫向誤差均方根31.10 m,縱向誤差110.10 m,綜合引導橫向誤差均方根837.80 m(等效481 km,角度0.099 7°),縱向誤差均方根70.70 m,縱向代表衛星星下軌跡方向,橫向指與軌跡垂直方向。
通過星上遙測記錄18 個目標的星上引導解算時間,統計得出星上自主任務規劃時間優于0.10 s。
3 在軌應用情況
浦江一號衛星在軌開展了自主任務規劃在軌測試和應用,在軌測試期間,先后執行了數百次自主任務規劃作業。以2015 年10 月15 日單目標自主任務規劃為例,引導成像結果如圖9 所示。圖中,“真實位置”代表地面目標所在位置,“星上定位”代表電磁監測載荷測量得到的目標位置。引導試驗中電磁環境監測星上定位誤差2.41 km,因平臺指向+相機擺鏡角度偏差導致的引導指向誤差橫向部分343.40 m,目標真實位置與成像引導視場的中心橫向偏差2.54 km,處于24 km 幅寬中心附近,電磁監測引導成像對目標捕獲成功。
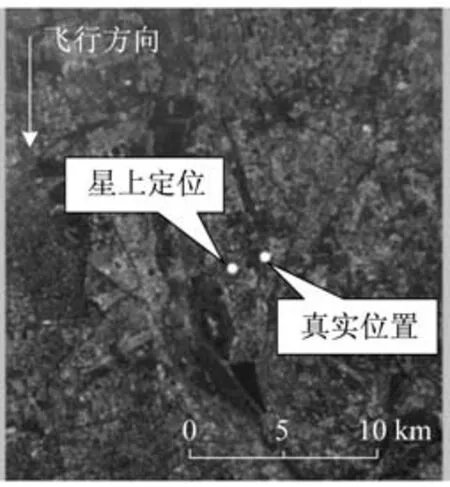
圖9 電磁環境監測引導光學成像在軌圖片Fig.9 On-orbit image by electromagnetic detection guided optical imaging
以2015 年10 月27 日多目標自主任務規劃為例,衛星對黑海、地中海、北非附近連續11 個區域進行了快速引導多區域成像任務,11 個區域連續成像成功執行,每個區域成像10 s。區域與衛星位置關系如圖10 所示。

圖10 連續成像目標分布圖Fig.10 Target distribution of continuous imaging
在軌應用表明,浦江一號衛星自主任務規劃的單目標引導成像橫向求解精度優于100 m,擺鏡指向控制精度優于0.10°,成像時刻求算時間小于40 ms。星上成像載荷可通過繞滾動軸擺鏡快速調整成像區域,具備對多目標自主、快速、連續成像的能力,單次作業實現規劃目標數優于10 個。
浦江一號衛星自主任務規劃引導效率高、精度高,縮短了衛星任務管理鏈條,在快速發現、識別、確認等應用方面發揮了重要作用,在軌應用獲取了大量高價值的電磁信號及影像數據。
4 結束語
本文對浦江一號衛星自主任務規劃的設計、測試及在軌應用進行了詳細介紹。浦江一號衛星自主任務規劃設計主要解決突發性、隨機性目標的成像任務,減少了衛星任務對地面的依賴,縮短了電磁信號監測載荷與光學成像載荷配合時間,探索了多載荷綜合探測技術,優勢互補,解決共視場、同時域、即聽即看的難題。同時也應看到,浦江一號衛星光學相機受光照、氣象條件影響,使用有一定的局限性。浦江一號衛星突破的單星多手段協同應用的自主成像任務規劃方法,可推廣至寬頻段電磁信號監測與高光譜成像、紅外成像、合成孔徑雷達成像綜合應用,以實現全天時、多維度信息獲取。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
公民與法治(2020年11期)2020-07-25 02:02:06
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
