
基于內模控制的分數階伺服焊鉗控制
2021-09-13 15:36:24劉鋒高忠林路向琨翟寶亮徐昊
中國測試 2021年12期
劉鋒 高忠林 路向琨 翟寶亮 徐昊
摘要:針對點焊過程中伺服焊鉗的重復定位精度差、速度響應慢等問題,利用伺服焊鉗電機模型,采用分數階低通 IMC 濾波器,建立基于 CRONE 原理的分數階 PID 參數整定模型,設計一種基于內模控制的直流伺服電機的分數階控制器,可以提高伺服焊鉗控制的穩定性和精確性。通過仿真對控制系統進行階躍響應測試、跟蹤性能測試以及模型不匹配時適用性測試,仿真結果表明,該控制器跟蹤精度高、響應速度快、調速范圍寬、低速穩定性好,適用性好,比傳統分數階 PID 設計的控制器表現更加優異,驗證該控制器的有效性。同時,由于采用 CRONE 原理進行分數階 PID 控制器參數整定,只需要2個調節參數,大大簡化參數整定過程。
關鍵詞:伺服焊鉗;內模控制; CRONE 原理;分數階 PID
中圖分類號: TP273文獻標志碼: A文章編號:1674–5124(2021)12–0114–06
Fractional servo welding tongs control based on internal model control
LIU Feng,GAO Zhonglin,LU Xiangkun,ZHAI Baoliang,XU Hao
(Tianjin 707 Hi-tech Co., Ltd., Tianjin 300131, China)
Abstract: Aiming at the problems of poor repetitive positioning accuracy and slow speed response of the servo welding gun during the spot welding process, using the servo welding gun motor model and using a fractional low-pass IMC filter, a fractional PID parameter tuning model based on the principle of CRONE is established. Afractional-ordercontrollerof DCservomotor basedoninternalmodelcontrolisdesigned,whichcan improve the stability and accuracy of servo welding gun control. Step response test, tracking performance test, and suitability test when the model does not match are performed on the control system through simulation. The simulation results show that the controller has high tracking accuracy, fast response speed, wide speed range, good low-speed stability, and good applicability. It performs better than the traditional fractional PID design controller, which verifies the effectiveness of the controller. At the same time, because the CRONE principle is used for the parameter tuning of the fractional PID controller, only two adjustment parameters are needed, which greatly simplifies the parameter tuning process.
Keywords: servo welding tongs; internal model control; CRONE principle; fractional PID
0引言
電阻點焊在焊接領域中具備應用技術成熟、機械自動化效率高、成本低廉等優點,已廣泛應用于電阻點焊在焊接領域中具備應用技術成熟、機航空、航天、汽車等工業領域。電阻點焊質量是由電、熱、力等復雜因素共同決定的,除了焊接過程中焊接參數的調優,提高伺服焊鉗控制精度對點焊質量的提高也具有重要作用,趙回等[1]運用LuGre摩擦模型和非線性干擾觀測器補償非線性干擾,提高了伺服系統的跟蹤性能;楊瑞峰等[2]運用基于 Backstepping 控制、前饋控制和等價輸入干擾(equivalent input disturbance, EID)估計的魯棒抗擾控制策略提高了 PMSM 位置伺服系統動態跟蹤特性和抗干擾特性。隨著分數階控制理論的發展,更具靈活性的分數階控制器為改進分數階系統的動態特性提供了可能,因此人們針對伺服電機控制的研究又燃起了興趣。針對這一問題,趙志誠等[3]針對高階復雜系統采用微粒群優化算法對系統模型進行優化,實現分數階內模控制器的快速整定;張濤等[4]為改善永磁同步直線電機控制性能,設計了一種結合分數階系統理和滑模控制理論的全局滑模智能控制方法;趙志濤等[5]設計了一種模糊自整定的分數階內模控制器改善直流調速系統;李洪科等[6]設計了一種基于時間最優控制的滑膜控制器,保證了伺服定位過程的快速性;黃宣睿等[7]根據工業機器人單關節的彈性傳動模型,基于內模控制原理提出一種工業機器人關節伺服系統振動抑制算法;陳興林等[8]運用分數階 PID 和內模原理實現了對長行程直線電機的精確伺服控制。
但在直流伺服電機的跟蹤控制和負載調節的控制技術方面精度控制還有不足,本文設計了一種內模控制的直流伺服電機分數階控制器,提出了一種利用 CRONE 原理進行參數整定的方法,并依托該控制器設計了一種對電極頭沖擊力小、電極壓力、位移、速度變化響應速度快且可精確控制的焊鉗伺服控制系統。
1伺服控制器的設計
在對伺服焊鉗作業過程的工作原理和特點進行分析和研究的基礎上,研制出了直流伺服電機控制系統,介紹了該控制系統的設計原理。
伺服驅動器要對伺服焊鉗實現精確控制,根據伺服點焊系統設計指標及功能要求,伺服控制器的設計必須滿足以下條件:
1)調速范圍寬。較寬的速度調節范圍可保證直流伺服電機控制系統能夠適應伺服焊鉗不同扭矩、加緊速度等工作條件;
2)系統響應速度快。伺服焊鉗工作頻率很高,需要伺服控制系統能夠進行自適應快速調節。這就要求控制系統的具有足夠的靈敏性并且過度過程的時間常數要夠小;
3)低速穩定性好。由于伺服焊鉗小開速度很慢,所以要求其伺服控制系統在低速運動時的動態性能表現良好,從而保證較高的控制精度;
4)抗電磁干擾性好。點焊技術是利用電阻熱原理進行加工的,在點焊出電流的瞬間會形成閉環通路,產生瞬時磁場變化會引起電磁干擾問題,影響直流伺服電機控制系統的穩定性,同時導致加工生產效率低下,增加設備維修成本。
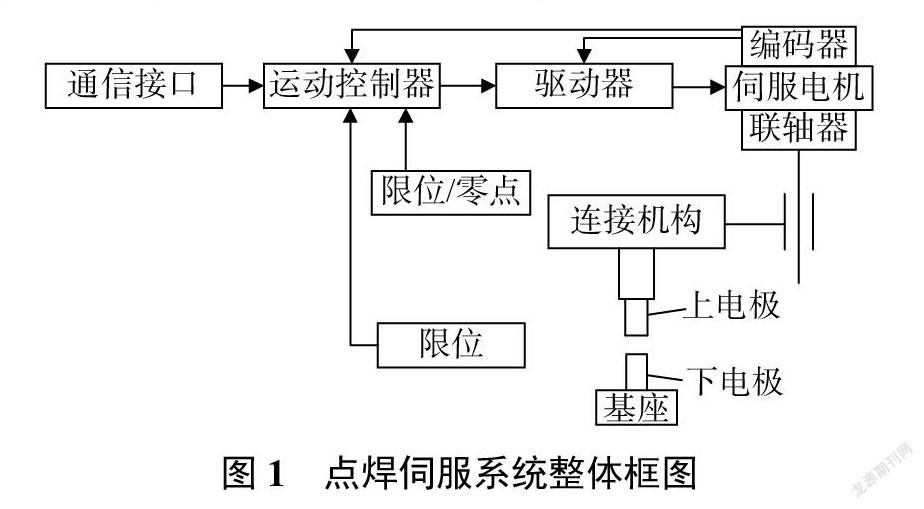
點焊伺服系統采用中頻直流焊機,整體結構采用模塊化結構形式,主要包括逆變電源系統、伺服驅動系統和焊接控制系統組成,點焊伺服系統整體框圖如圖1所示。逆變電源系統主要通過將高壓500 V 左右三相交流電經整流濾波、逆變、再整流獲得平穩的低電壓,大電流10000~18000 A 的直流電以滿足中頻焊鉗需要;焊接控制系統主要實現焊接參數的配置;本文主要介紹由伺服驅動器、編碼器、伺服電機、傳動機構和伺服焊鉗組成的伺服驅動系統,伺服驅動器控制伺服電機動作,實現電極的進給量、進給速度和焊鉗壓力的精確控制。
為滿足逆變電焊的高頻操作和伺服電機高速運行的實時性要求,本文采用Ti公司的具有快速響應與處理能力的數字信號處理芯片作為核心控制芯片,采用光耦隔離防止控制電路及輸入電路之間的干擾;伺服驅動控制電路模擬電壓采用高精度數模轉換芯片產生;通信電路采用485通信接口;采用AM26LS31芯片外圍脈沖輸出信號進行處理。系統框圖如圖2所示。
伺服功能框圖如圖3所示,初始位置控制階段,控制伺服電機帶動電極加速接近,在快要接觸時,控制器減速接近。電極到位后進入轉矩控制階段,控制伺服電機轉矩輸出至額定壓力,焊接電源輸出電流結束后焊接控制器發送脈沖信號控制電機反轉轉換為位置控制,焊鉗打開隨后加速打開至初始狀態。
伺服焊鉗系統如圖4所示,中頻逆變點焊控制器選用 STM32F 系列 ARM Cortex-M4為核心微處理器,滿足系統主機適合復雜智能化運算、數模轉換速度要求同時提供系統復位信號和看門狗定時器;為獲得良好的存儲、通信功能,擴展 X25045數據存儲器存儲用戶預設焊接參數;初級電流、次級電流、次級電壓等焊接參數的采集測量由傳感器采集模擬量經放大器和 A/D 轉換器數字化處理之后存入核心處理器;系統工作狀態由狀態指示燈指示;氣閥、啟動、報警、按鈕等外部控制器件的開關量輸入由光電耦合器實現;通過調節 PWM 觸發中 IGBT 的占空比可實現焊接過程中焊接參數調節。
2伺服焊鉗分數階控制
2.1伺服焊鉗電機模型
伺服焊鉗的直流伺服電機模型如圖5所示,只考慮伺服電機自轉情況,因其剛性高,摩擦系數小,因此彈性負載和粘性負載可忽略,其線性化的特性方程可以描述為:
式中:ia——電樞繞組電流;
u——電樞繞組輸入電壓;
ω——轉子角速度;
J——系統轉動慣量;
R——電樞繞組電阻;
L——電樞繞組電感;
Kb——反電動勢常數;
Kt——轉矩常數;
d ——系統阻尼系數。
從式 (1)、(2) 直流電動機可以表示為線性時不變單輸入單輸出 (SISO) 系統,可以用一個傳遞函數來描述:
帶有一個額外的增益,因此,完整的模型可以寫為:
其中。為達到預想控制效果,需設計一個反饋配置的控制器 (如圖 6 所示),使直流電機在沒有穩態誤差的情況下跟蹤參考轉速,并滿足規定的控制性能。其中 D 是干擾,并且對所有的 D 有。
2.2控制方案
針對式(3)所描述的伺服電機系統選用分數階低通 IMC 濾波器設計分數階控制器,采用 CRONE 原理進行控制器參數整定,并對所提出的控制器進行速度、位置控制的仿真分析。
2.2.1控制器設計
分數階低通濾波器通過選取合適的階次,可以在系統魯棒性和震動抑制兩方面達到較好的平衡,因此選擇分數階低通 IMC 濾波器[9]進行控制器設計:
式中:λ——濾波器時間常數;
β——濾波器階次。
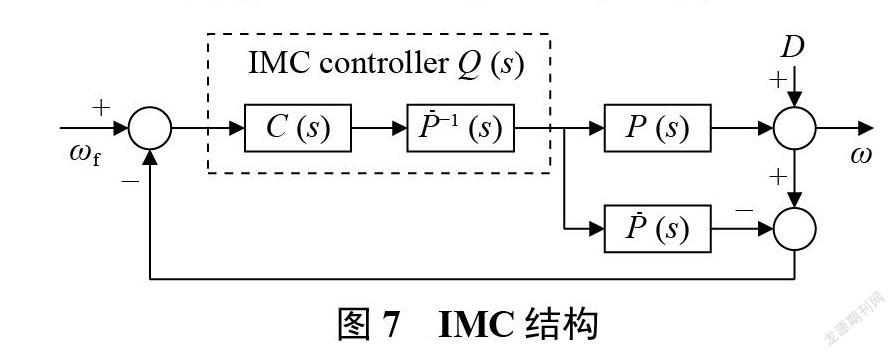
IMC 結構如圖7所示,IMC 模型為:
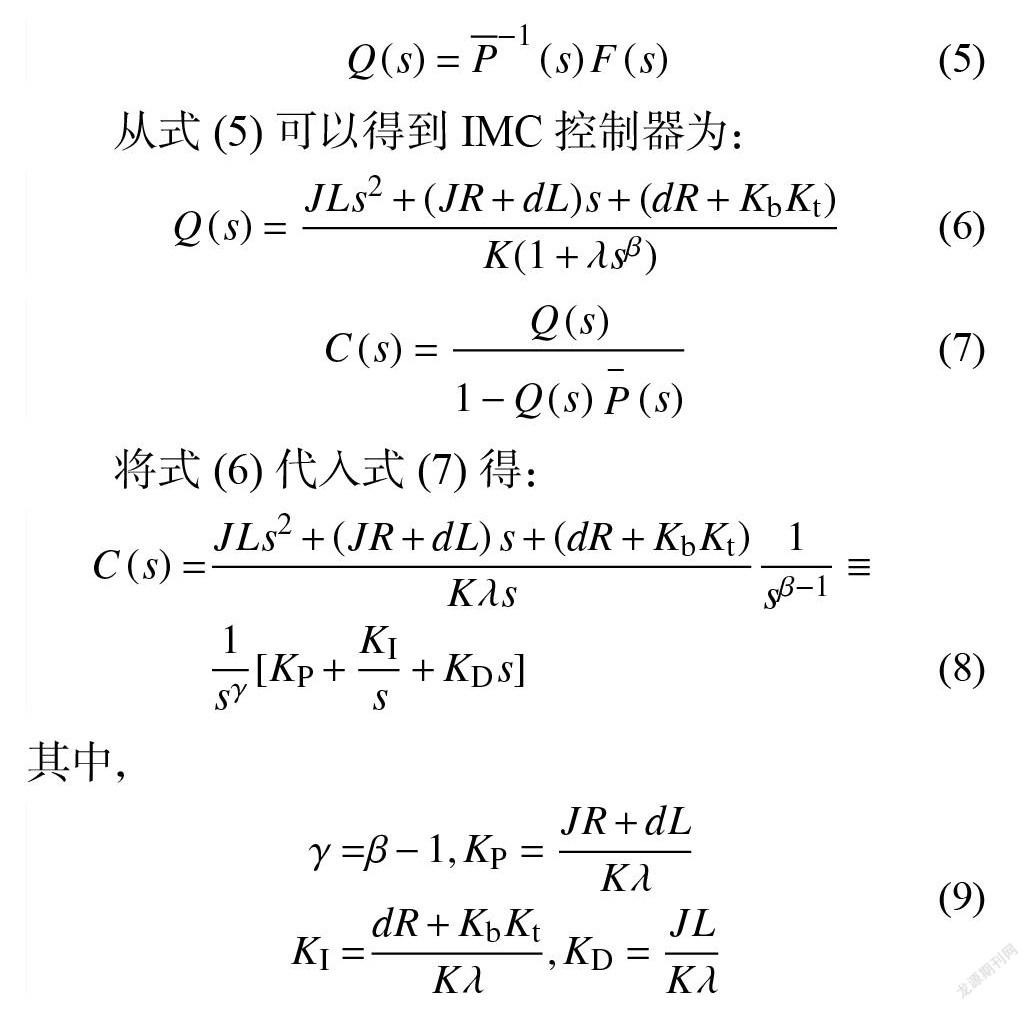
從式(5)可以得到 IMC 控制器為:
將式(6)代入式(7)得:
其中,
式(8)表示由低通 IMC 濾波器得到的帶有附加分數階積分器級聯的 PID 控制器。
2.2.2控制器參數整定
CRONE 控制方法是一種頻域方法,根據 Bode 的理想傳遞函數格式進行分數階積分。通過控制魯棒性的方法來優化等阻尼性能和穩定裕度等時域和頻域的性能指標。CRONE 原理保證了控制器對系統增益不確定性的魯棒性[10]。在 CRONE 原理中,開環傳遞函數由分數階積分器定義。以一個具有開環傳遞函數的常規反饋控制系統為例(如圖6所示):
因此,對于式(10),增益交叉頻率為:
開環 Bode 圖振幅斜率為一20αdB/dec,并且固定相位為一0.5απ,式(10)的閉環傳遞函數為:
超調量和輸出響應速度分別由α和?gc確定,因此對于式(12),T (s)的相位裕度為:
式(8)的控制器有兩個未知變量稱為調優參數,即λ和γ。式(4)中F(s)可作為應用 CRONE 原理的參考模型,有T(s)= F (s)。現在比較式(4)和式(10),可以得到α=β和k =。將α、k值代入,得到調諧參數為:
因為γ=β一1,有:
因此,使用所需的規范?gc和?可以實現調優。
2.2.3信號跟蹤
此時需要觀察和研究提出的控制器的跟蹤性能。需驗證當閉環系統采用 IMC 濾波時,單位階躍輸入穩態誤差e(t)為零,式(4)中的F(s)用于設計基于 IMC 的控制器。
證明:互補靈敏度函數,即閉環傳遞函數為
T (s)= F (s),可得出靈敏度函數:
如果E(s)是E(t)的拉普拉斯變換,即:
將式(16)代入式(17),由系統的終值定理得:
因此,證明了穩態時誤差信號收斂于零,輸出跟隨階躍輸入。該控制方案保證穩態誤差為零,閉環階躍響應具有等阻尼特性,對過程增益變化具有魯棒性。
3 系統仿真
為了說明所提方法的有效性,在Matlab中利用 FOTF Toolbox仿真測試設計的控制器。分數階導數由Oustaloup遞歸濾波器實現,選擇工作頻率范圍為[?l, ?h]=[10一3 , 103 rad/s,濾波器階數N =5,采用8LSA46.E1030C000-3同步電機的參數如下:J =4.39 kg · cm2,Kt =1.63 N·m/A,Kb =98.44 V/1000 rad, d =10一3 N·ms/rad,R =1.92?,L =17.44 mH,η=288/π。結合式(11)和式(12)得到λ=1和γ=。為了驗證控制器的有效性,采用傳統的 IMC 方法設計 PID 控制器參數如表1所示。
為了驗證所設計控制器的跟蹤性能,分別采用該控制器和 IMC 控制器進行系統階躍性能分析,仿真結果如圖8所示,相對于基于 IMC 的 PID 控制器,結合 CRONE 原理的分數階控制器響應更快且平滑,無超調。為了測試該控制器的抗干擾能力,在階躍響應調節完成后改變轉速,結果表明該控制器的抗干擾性能依然表現良好,圖9和圖10分別為改變電機轉動慣量J和電樞繞組電阻R時的仿真結果,從圖中可以看出,在模型不匹配時也表現出了良好的性能。
將控制器應用到位置控制過程,其中位置控制傳遞函數模型為:
其中K =21.721,τ=0.147,運用相同參數整定方法得到?c =5rad/s,φ=π/4,可以得到控制器為:
為了對比,采用了 IMC 技術,得到的控制器為 KP =0.0921, KD=0.0135的 PD 控制器。為了進一步分析跟蹤性能,得到系統單位階躍響應如圖11所示,與基于 IMC 的 PID 控制器相比,所提出的控制器響應速度更快且平滑,并且在加入擾動之后依舊表現出優秀的抗干擾性能。
為了驗證在模型不匹配時控制器的性能,分別改變電機轉動慣量J和電樞繞組電阻R并進行仿真分析,仿真結果分別如圖12和圖13所示,從圖中可以看出,在模型不匹配時也表現出了良好的性能。
4 結束語
在對伺服焊鉗作業過程的工作原理和特點進行分析和研究的基礎上,研制了直流伺服電機控制系統,該控制系統采用內模控制和 CRONE 原理相結合的分數階控制器進行伺服焊鉗運動控制。仿真結果表明該控制系統具有以下優異性:
1)該直流伺服電機控制系統具有結構簡單、可靠、跟蹤精度高、系統響應速度快、調速范圍寬、低速穩定性好等優點,可滿足伺服焊鉗控制要求;
2)該控制器采用 CRONE 原理進行分數階 PID 控制器參數整定,能夠簡化控制器結構,并且在精確性、穩定性和適用性方面比傳統分數階 PID 設計的控制器表現優異。
參考文獻
[1]趙回, 王雪梅, 許哲, 等.一種轉臺伺服系統干擾補償控制方法研究[J].中國測試, 2019, 45(3):139-145.
[2]楊瑞峰, 郭明明, 張鵬, 等. PMSM 位置伺服系統魯棒控制技術研究[J].中國測試, 2017, 43(4):89-94.
[3]趙志誠, 李明杰, 劉志遠, 等.復雜系統的分數階內模控制器設計[J].控制與決策, 2015, 30(3):531-535.
[4]張濤, 唐傳勝, 李冠甲.基于神經網絡的高性能直線電機伺服系統分數階滑模控制[J].微電機, 2016, 49(8):50-53.
[5]趙志濤, 趙志誠, 王惠芳.直流調速系統模糊自整定分數階內模控制[J].山東大學學報(工學版), 2015, 45(5):58-62,76.
[6]李洪科, 李槐樹, 黃麟舒.交流位置伺服系統的時間次優滑模控制器設計[J].測控技術, 2012, 31(1):52-56.
[7]黃宣睿, 宋宇洋, 李秋生, 等.一種基于內模控制的工業機器人關節伺服系統振動抑制算法[J].電工技術學報, 2019,34(3):497-505.
[8]陳興林, 陳震宇.基于分數階 PID 及內模原理的長行程直線電機控制系統設計[J].天津工業大學學報, 2016, 35(1):59-64.
[9]趙玉秀.基于干擾的液壓機器人力伺服系統控制策略研究[D].哈爾濱:哈爾濱理工大學, 2020.
[10] PATRICKLANUSSE,MASSINISSATARI. Simplified fractional-orderdesignofaMIMOrobustcontroller[J]. Fractional Calculus and Applied Analysis, 2019, 22(5):1177-1202.
(編輯:劉楊)
