基于機(jī)器人的生豬健康養(yǎng)殖智能監(jiān)控系統(tǒng)設(shè)計(jì)*
2021-09-13 01:22:36劉艷昌趙海生李澤旭張志霞左現(xiàn)剛李國厚
中國農(nóng)機(jī)化學(xué)報(bào) 2021年8期
關(guān)鍵詞:環(huán)境
劉艷昌,趙海生,李澤旭,張志霞,左現(xiàn)剛,李國厚
(河南科技學(xué)院信息工程學(xué)院,河南新鄉(xiāng),453003)
0 引言
隨著生豬養(yǎng)殖規(guī)模的擴(kuò)大,傳統(tǒng)人工巡檢方式對(duì)生豬生活環(huán)境、健康狀態(tài)和日常行為進(jìn)行采樣、監(jiān)視、識(shí)別與診斷,不僅管理控制效率低,而且由于飼養(yǎng)員的時(shí)間精力限制很容易忽視養(yǎng)殖過程中的一些異常環(huán)境和異常行為表現(xiàn),導(dǎo)致生豬發(fā)病率和死亡率較高,同時(shí)過多人畜接觸不僅會(huì)使生豬發(fā)生應(yīng)激反應(yīng)、打亂生豬日常的生活狀態(tài)而且還造成人畜疾病交叉感染,一旦出現(xiàn)疫情失控,會(huì)給整個(gè)養(yǎng)殖企業(yè)帶來嚴(yán)重經(jīng)濟(jì)損失[1-4]。
為了提高生豬養(yǎng)殖企業(yè)的智能化和精準(zhǔn)化管理水平,王輝明等[5]設(shè)計(jì)一種基于ZigBee和組態(tài)王軟件的養(yǎng)豬場(chǎng)環(huán)境監(jiān)控系統(tǒng),采用模糊算法對(duì)被控參數(shù)進(jìn)行優(yōu)化,控制精度小于4%;譚輝磊等[6]提出一種基于輪廓的豬只飲水行為識(shí)別方法,能夠正確地識(shí)別豬只飲水行為,但識(shí)別效率還待提高;王傳哲等[7]提出了一種基于姿態(tài)角的生豬行為識(shí)別方法,采用微慣性傳感器和BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練模型對(duì)生豬站、走、臥、趟4類姿態(tài)進(jìn)行識(shí)別,整體生豬行為識(shí)別準(zhǔn)確率為92.6%;吳世海等[8]設(shè)計(jì)一種基于機(jī)器視覺技術(shù)的豬只行為活動(dòng)無接觸識(shí)別系統(tǒng),僅通過單一CCD相機(jī)采集視頻圖像信息對(duì)豬的運(yùn)動(dòng)、呼吸和排泄等行為活動(dòng)進(jìn)行識(shí)別,準(zhǔn)確率在94%以上,但在綜合利用多感知信息診斷生豬健康行為識(shí)別與異常行為評(píng)估與處理方面研究較少。黎煊等[9]采用基于豬場(chǎng)環(huán)境豬連續(xù)咳嗽聲識(shí)別的方法,構(gòu)建了基于連續(xù)語音識(shí)別技術(shù)的BLSTM-CTC豬咳嗽聲識(shí)別模型,總識(shí)別率達(dá)到94.29%。
綜上所述,現(xiàn)有多數(shù)研究者僅對(duì)豬舍內(nèi)固定位置生豬生長環(huán)境和豬只日常行為進(jìn)行檢測(cè),難以從多個(gè)角度實(shí)現(xiàn)對(duì)生豬生長異常環(huán)境精準(zhǔn)調(diào)控和異常行為準(zhǔn)確識(shí)別、疾病診斷與疫情預(yù)警。為此,本文設(shè)計(jì)了一種以軌道式移動(dòng)機(jī)器人為采集終端,以FPGA、STM32控制器,兩級(jí)聯(lián)動(dòng)采樣裝置、射頻和WiFi傳輸模塊為硬件核心,以C#監(jiān)控軟件為開發(fā)平臺(tái),采用多感知傳感技術(shù)和DT-SVM[10]豬只姿態(tài)分類識(shí)別算法實(shí)現(xiàn)對(duì)生豬養(yǎng)殖環(huán)境和豬只行為特征信息的自動(dòng)采集,結(jié)合管理人員、養(yǎng)殖專家經(jīng)驗(yàn)和大數(shù)據(jù)技術(shù)實(shí)現(xiàn)對(duì)生豬異常環(huán)境及時(shí)調(diào)控、異常行為快速識(shí)別、疾病診斷與疫情預(yù)警功能,提高了生豬養(yǎng)殖過程的智能化管理水平。
1 系統(tǒng)整體結(jié)構(gòu)與工作原理
系統(tǒng)主要由移動(dòng)終端監(jiān)測(cè)平臺(tái),執(zhí)行機(jī)構(gòu)平臺(tái)和行為監(jiān)測(cè)平臺(tái)組成,其結(jié)構(gòu)如圖1所示。

圖1 系統(tǒng)硬件結(jié)構(gòu)圖Fig.1 Hardware block diagram of system
系統(tǒng)在手動(dòng)控制下,管理人員利用攝像頭、現(xiàn)場(chǎng)觸摸屏、PC或APP監(jiān)控界面上操作按鈕控制機(jī)器人沿豬舍正上方軌道進(jìn)行巡檢,借助采集執(zhí)行終端全局和局部監(jiān)測(cè)裝置對(duì)異常環(huán)境和豬只行為進(jìn)行采集,經(jīng)FPGA控制器數(shù)據(jù)融合處理后傳至PC,以便管理人員對(duì)異常信息進(jìn)行分析、判斷,及時(shí)對(duì)異常情況進(jìn)行處理。
系統(tǒng)在自動(dòng)控制下,機(jī)器人按照管理人員在監(jiān)控室PC或APP上預(yù)先設(shè)定路徑進(jìn)行巡檢,當(dāng)安裝在圖2(a)采集移動(dòng)終端底盤前半部分中間位置的采集站點(diǎn)定位讀卡器檢測(cè)到豬舍標(biāo)簽信息后,電機(jī)停止轉(zhuǎn)動(dòng),同時(shí)安裝在豬舍軌道兩側(cè)上的限位開關(guān)打開,確保巡檢機(jī)器人停在豬舍中間正上方位置,借助圖2(b)采集執(zhí)行終端的全局監(jiān)測(cè)裝置對(duì)豬舍環(huán)境和豬只行為進(jìn)行監(jiān)測(cè),若有異常情況,圖2(b)采集執(zhí)行終端上的局部監(jiān)測(cè)裝置將驅(qū)動(dòng)底座旋轉(zhuǎn)機(jī)構(gòu)、機(jī)械臂及轉(zhuǎn)軸向異常處靠近,結(jié)合局部攝像機(jī)和執(zhí)行末端感知傳感器從多角度對(duì)異常環(huán)境和豬只行為進(jìn)行詳細(xì)采集和觀察,并以無線方式將異常信息、豬舍位置和豬只身份傳至行為監(jiān)測(cè)平臺(tái),結(jié)合大數(shù)據(jù)、養(yǎng)殖專家和飼養(yǎng)技術(shù)人員經(jīng)驗(yàn)對(duì)異常情況進(jìn)行綜合診斷,及時(shí)確定生豬健康/疫情狀況變化規(guī)律,為飼養(yǎng)人員及早發(fā)現(xiàn)養(yǎng)殖過程中的異常狀況和科學(xué)決策提供科學(xué)依據(jù)。生豬健康養(yǎng)殖智能采樣裝置如圖2所示。

(a)采集移動(dòng)終端
2 系統(tǒng)硬件設(shè)計(jì)
2.1 環(huán)境采集電路設(shè)計(jì)
豬舍溫濕度采集采用單總線通信方式的AM2320檢測(cè)模塊,為提高數(shù)據(jù)傳輸抗干擾能力,確保總線空閑時(shí)為高電平,在SDA引腳上外接1K的上拉電阻;豬舍二氧化碳、氨氣和硫化氫有害氣體含量檢測(cè)分別采用低功耗S8-0053型紅外CO2檢測(cè)模塊、MQ-137型NH3檢測(cè)模塊和MQ-136型H2S檢測(cè)模塊;豬舍粉塵含量采用激光粉塵檢測(cè)模塊SDS011,可測(cè)量舍內(nèi)PM2.5和PM10粉塵濃度。檢測(cè)環(huán)境參數(shù)檢測(cè)電路如圖3所示。
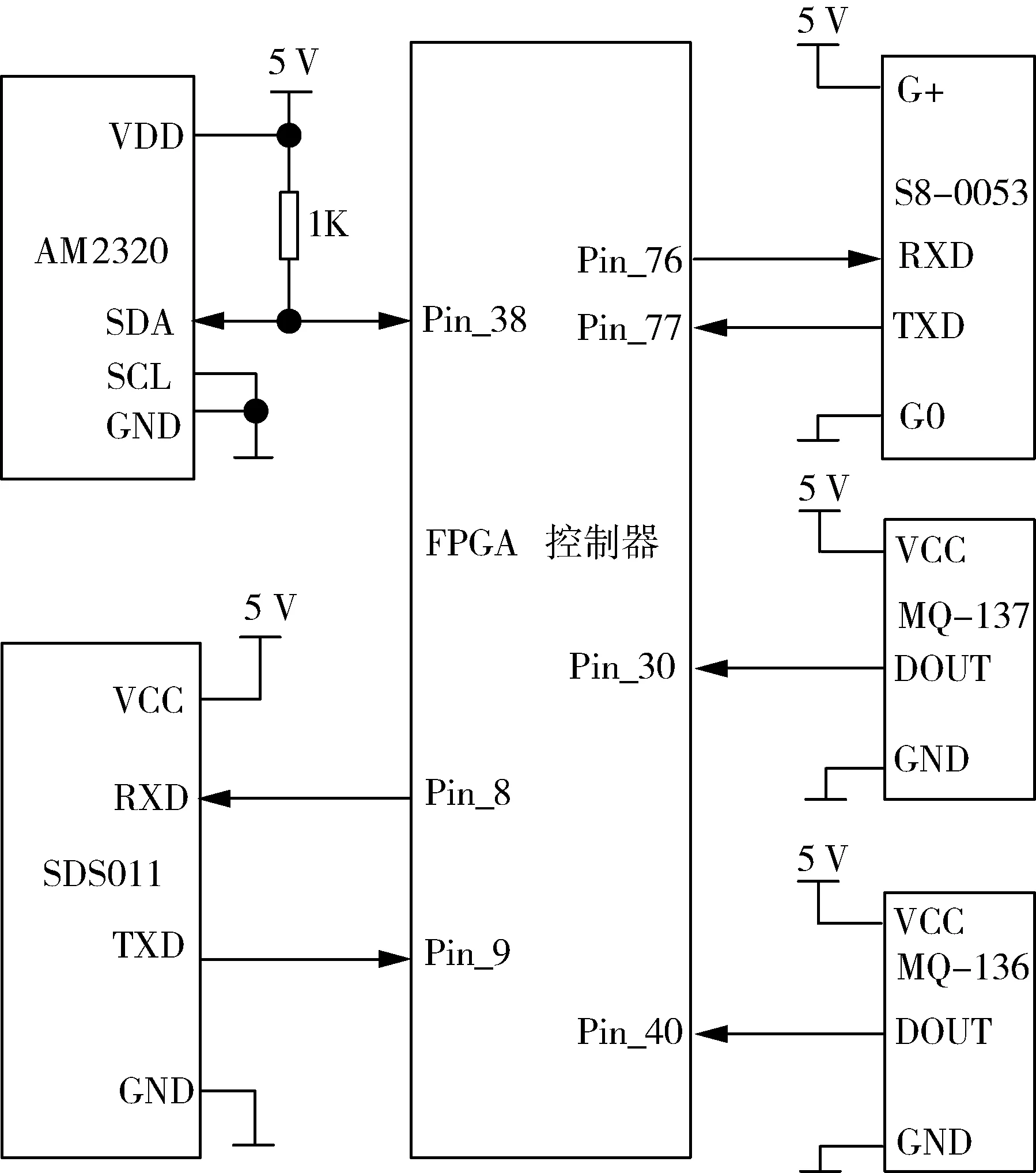
圖3 環(huán)境參數(shù)檢測(cè)電路圖Fig.3 Environmental parameter detection circuit diagram
2.2 運(yùn)動(dòng)與體特征采集電路設(shè)計(jì)
豬只運(yùn)動(dòng)行為采用I2C通信方式的ADXL345型三軸加速度傳感器實(shí)現(xiàn)姿態(tài)識(shí)別;豬只體溫和心率分別采用單總線和I2C通信方式的DS18B20和MAX30102型傳感器實(shí)現(xiàn)體特征參數(shù)檢測(cè);采集數(shù)據(jù)通過WiFi模塊HC-05傳至FPGA控制器數(shù)據(jù)處理中心進(jìn)行數(shù)據(jù)融合。運(yùn)動(dòng)和體特征采集檢測(cè)電路如圖4所示。
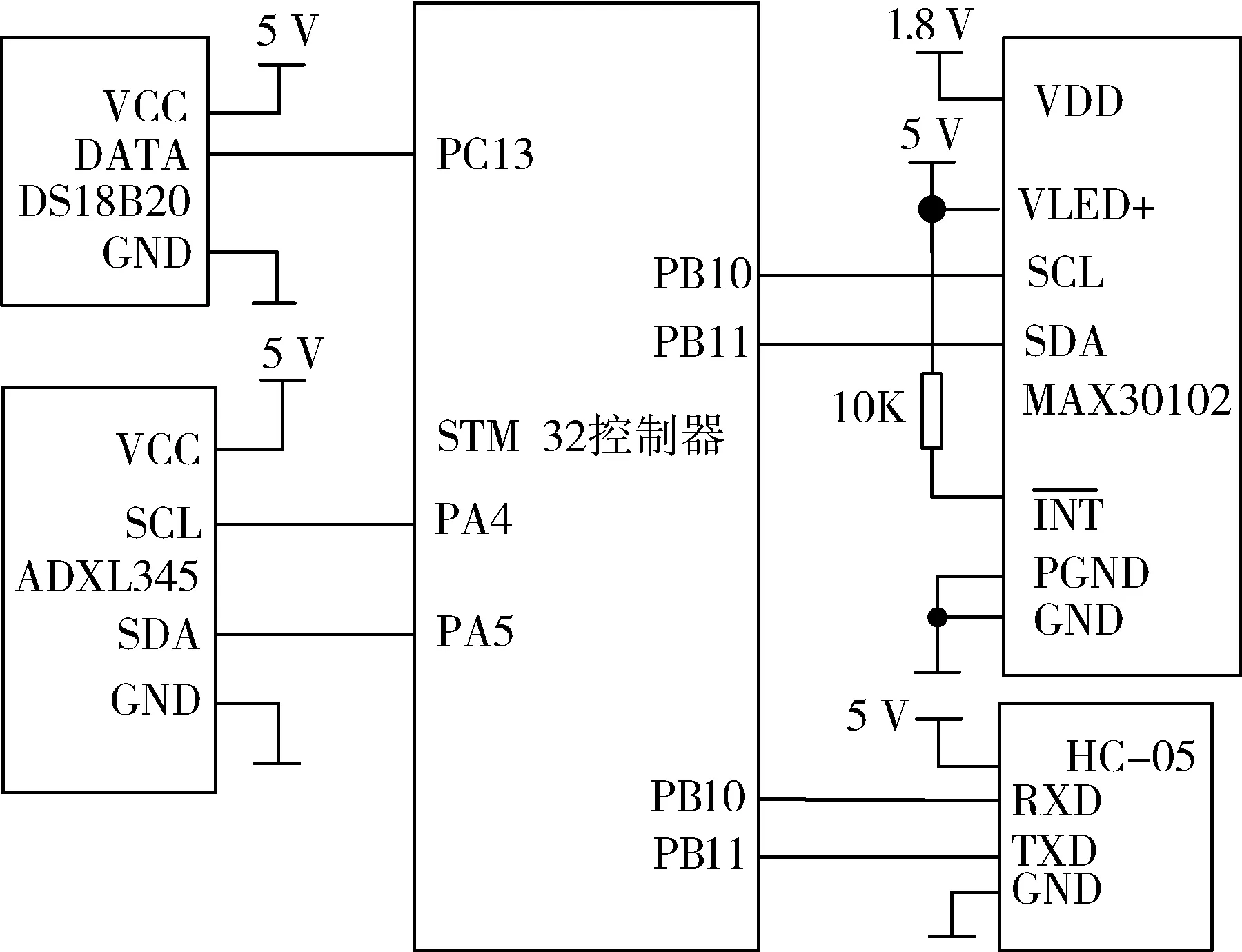
圖4 運(yùn)動(dòng)和體特征采集電路圖Fig.4 Motion and body feature acquisition circuit diagram
2.3 移動(dòng)執(zhí)行終端電路設(shè)計(jì)
機(jī)器人移動(dòng)底盤安裝JY-L8800型讀卡器與豬舍軌道標(biāo)簽配合實(shí)現(xiàn)定位識(shí)別功能,通過MAX232實(shí)現(xiàn)RS232電平與TLL電平轉(zhuǎn)換,并傳至FPGA控制器進(jìn)行數(shù)據(jù)處理;為提高FPGA控制器的驅(qū)動(dòng)能力,在輸出端口通過反相器74HC06接到驅(qū)動(dòng)電路輸入端;為避免驅(qū)動(dòng)電路對(duì)FPGA控制器輸出信號(hào)的干擾,在FPGA控制器和電機(jī)驅(qū)動(dòng)電路LN298間通過TLP521實(shí)現(xiàn)光電連接;為消除電機(jī)在啟停、制動(dòng)及換向時(shí)產(chǎn)生的反電動(dòng)勢(shì)對(duì)驅(qū)動(dòng)電路損壞,采用8個(gè)1N5822(D1~D8)高速大電流肖特基二極管構(gòu)成驅(qū)動(dòng)器保護(hù)電路[11]。機(jī)器人巡檢速度控制通過FPGA控制器端口Pin_42和Pin_43輸出的PWM脈沖占空比來實(shí)現(xiàn)。機(jī)器人移動(dòng)終端控制電路如圖5所示。
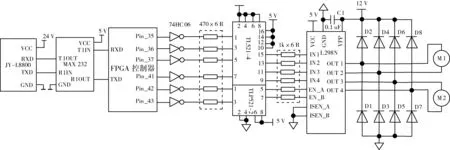
圖5 機(jī)器人移動(dòng)終端控制電路圖Fig.5 Robot mobile terminal control circuit
3 系統(tǒng)軟件設(shè)計(jì)
3.1 模糊PID控制器設(shè)計(jì)
為實(shí)現(xiàn)移動(dòng)機(jī)器人沿預(yù)定軌道準(zhǔn)確、快速自主循跡和數(shù)據(jù)采集功能,該系統(tǒng)結(jié)合移動(dòng)底盤讀卡器、豬舍軌道上安裝的RFID感應(yīng)卡和限位開關(guān)實(shí)現(xiàn)采集站點(diǎn)準(zhǔn)確定位。采用模糊PID控制算法[12-13]對(duì)機(jī)器人底盤主動(dòng)輪電機(jī)進(jìn)行差速控制,實(shí)現(xiàn)對(duì)全向?qū)б投ㄎ恍阅軆?yōu)化。模糊PID控制器如圖6所示。
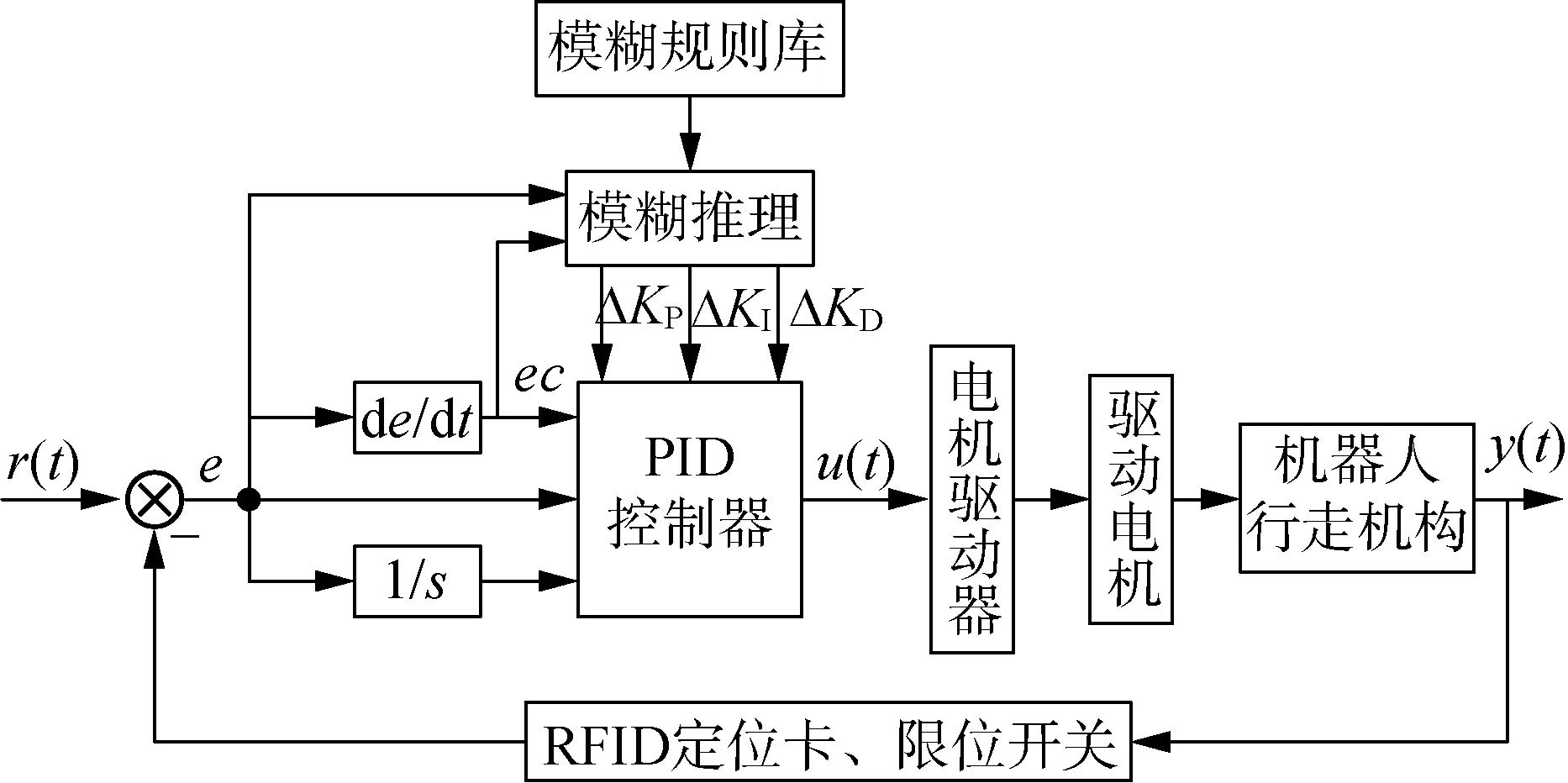
圖6 模糊PID控制器Fig.6 Fuzzy PID controller
為提高PID控制器的魯棒性和減少FPGA控制器運(yùn)算能力,PID控制器采用增量式PID控制,其表達(dá)式[14-15]為
u(k)=u(k-1)+KP[e(k)-e(k-1)]+
KIe(k)+KD[e(k)-2e(k-1)+e(k-2)]
(1)
e(k)=r(k)-y(k)
(2)
式中:u(k)——PID控制器的輸出;
r(k)——給定的期望位置;
y(k)——機(jī)器人實(shí)際停靠位置;
e(k)——偏差信號(hào)。
根據(jù)模糊PID控制原理,構(gòu)建機(jī)器人巡檢和定位功能的模糊控制器需要以下3個(gè)步驟。
1)根據(jù)機(jī)器人巡檢與定位控制特點(diǎn),該系統(tǒng)采用二維輸入三維輸出的模糊控制方法。結(jié)合環(huán)境參數(shù)和豬只行為采集實(shí)際情況、定位偏差經(jīng)驗(yàn),確定輸入輸出變量的各參數(shù)論域見表1。為提高系統(tǒng)控制器的靈敏度和穩(wěn)定性,各模糊語言變量的隸屬度函數(shù)選擇三角函數(shù)。
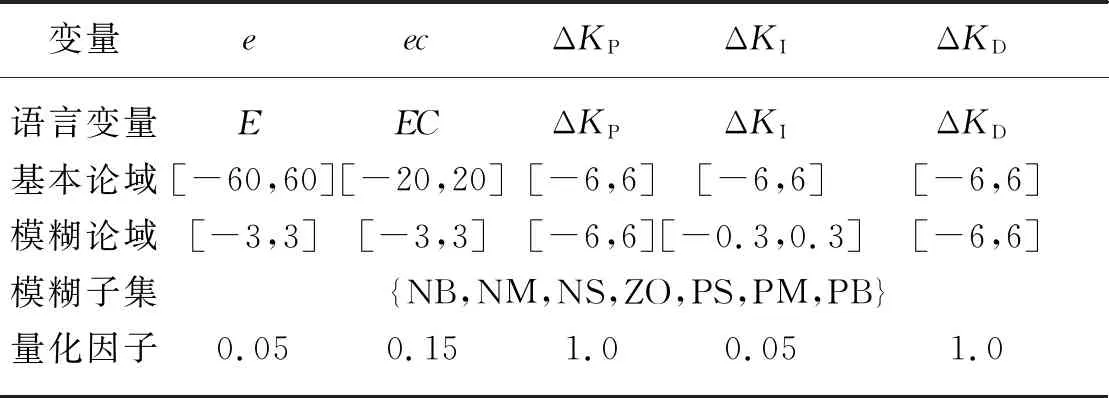
表1 輸入輸出變量關(guān)系表Tab.1 Input and output variable relation table
2)根據(jù)飼養(yǎng)員對(duì)機(jī)器人的控制經(jīng)驗(yàn)和定位偏差,結(jié)合輸入輸出量的模糊子集,建立PID系數(shù)增量ΔKP、ΔKI、ΔKD的模糊控制規(guī)則見表2。

表2 ΔKP、ΔKI、ΔKD的模糊控制規(guī)則表Tab.2 ΔKP、ΔKI、ΔKD fuzzy control rule table
3)為實(shí)現(xiàn)巡檢機(jī)器人電機(jī)差速控制,必須把模糊量精確化。為了達(dá)到系統(tǒng)控制精度、靈敏性要求,這里采用加權(quán)平均法作為精確化方式,其計(jì)算公式
(3)
式中:uo——精確控制量;
ui——論域中的第i個(gè)元素;
μ(ui)——對(duì)應(yīng)的隸屬度。
再經(jīng)量化因子運(yùn)算后,得出參數(shù)變化量ΔKP、ΔKI、ΔKD的值,最后將最佳控制參數(shù)KP=KP0+ΔKP;KI=KI0+ΔKI;KD=KD0+ΔKD代入式(1),控制電機(jī)驅(qū)動(dòng)模塊輸出不同占空比PWM波控制主動(dòng)輪電機(jī)轉(zhuǎn)速,結(jié)合射頻讀卡器、定位標(biāo)簽和限位開關(guān)實(shí)現(xiàn)巡檢機(jī)器人快速、精準(zhǔn)、停靠定位功能。
3.2 下位機(jī)軟件設(shè)計(jì)
基于Quartus II 15.0開發(fā)環(huán)境,采用verilog HDL語言對(duì)機(jī)器人采集終端和現(xiàn)場(chǎng)各執(zhí)行機(jī)構(gòu)驅(qū)動(dòng)電路進(jìn)行模塊化編程,結(jié)合巡檢路徑規(guī)劃算法、模糊PID電機(jī)調(diào)速控制算法和視頻處理技術(shù)實(shí)現(xiàn)巡檢機(jī)器人的準(zhǔn)確停靠、環(huán)境參數(shù)精準(zhǔn)調(diào)控和異常情況快速采集與診斷等功能。采集站點(diǎn)控制程序流程如圖7所示。

圖7 采集站點(diǎn)控制程序流程圖Fig.7 Collection site control program flow chart
3.3 無線傳輸網(wǎng)絡(luò)軟件設(shè)計(jì)
打開PC或APP端監(jiān)控軟件,WiFi與機(jī)器人采集站點(diǎn)和執(zhí)行機(jī)構(gòu)的IP和端口號(hào)連接成功后,采集站點(diǎn)將采集的豬只聲音、編號(hào)、體溫、心率和姿態(tài)數(shù)據(jù)進(jìn)行融合,并通過WiFi傳輸模塊HC-05傳至監(jiān)控中心,結(jié)合WiFi視頻傳輸模塊RT5305F上傳的視頻圖像對(duì)豬只健康狀態(tài)進(jìn)行診斷、評(píng)估,對(duì)環(huán)境調(diào)控執(zhí)行機(jī)構(gòu)進(jìn)行控制。采集站點(diǎn)網(wǎng)絡(luò)傳輸流程如圖8所示。
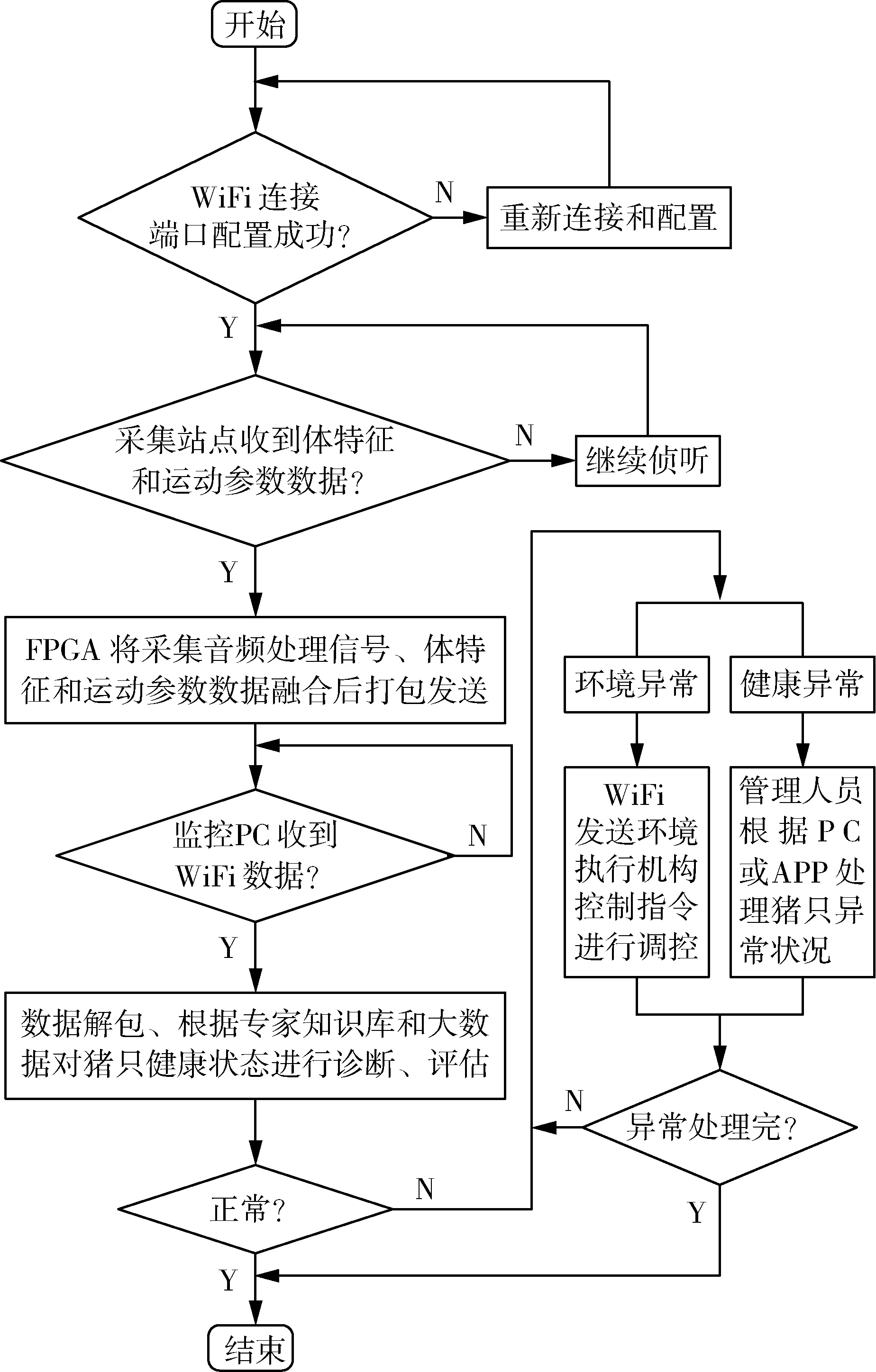
圖8 采集站點(diǎn)網(wǎng)絡(luò)傳輸設(shè)計(jì)流程圖Fig.8 Flow chart of network transmission design of collection site
3.4 上位機(jī)軟件設(shè)計(jì)
監(jiān)控室PC通過Visual Studio2016開發(fā)平臺(tái)[16]對(duì)系統(tǒng)進(jìn)行搭建,采用.NET Framework4.0框架對(duì)系統(tǒng)進(jìn)行配置,采用C#語言、SQL Server數(shù)據(jù)庫等工具設(shè)計(jì)了一種基于機(jī)器人的生豬健康養(yǎng)殖智能監(jiān)控系統(tǒng)。自動(dòng)模式下,飼養(yǎng)人員借助PC監(jiān)控界面或手機(jī)APP實(shí)現(xiàn)對(duì)生豬養(yǎng)殖環(huán)境、日常行為的遠(yuǎn)程實(shí)時(shí)監(jiān)測(cè)、信息查詢和執(zhí)行機(jī)構(gòu)控制等功能;手動(dòng)模式下,當(dāng)Wi-Fi連接成功后,輸入采集機(jī)器人對(duì)應(yīng)IP地址和端口號(hào),點(diǎn)擊連接網(wǎng)絡(luò)按鈕連接成功后,飼養(yǎng)人員可以對(duì)機(jī)器人巡檢路徑、采集站點(diǎn)、延時(shí)時(shí)間、車速等參數(shù)和運(yùn)行狀態(tài)進(jìn)行控制。圖9為生豬養(yǎng)殖采樣站點(diǎn)調(diào)控界面,圖9中飼養(yǎng)人員按正序巡檢路徑對(duì)采集站點(diǎn)進(jìn)行設(shè)置,若采樣機(jī)器人到達(dá)設(shè)置停靠站點(diǎn)2、4、6、8時(shí)對(duì)應(yīng)站點(diǎn)上紅色指示燈閃爍,當(dāng)采樣延時(shí)時(shí)間結(jié)束時(shí)變?yōu)榫G色,然后按照預(yù)先設(shè)定路徑繼續(xù)行走與采樣。
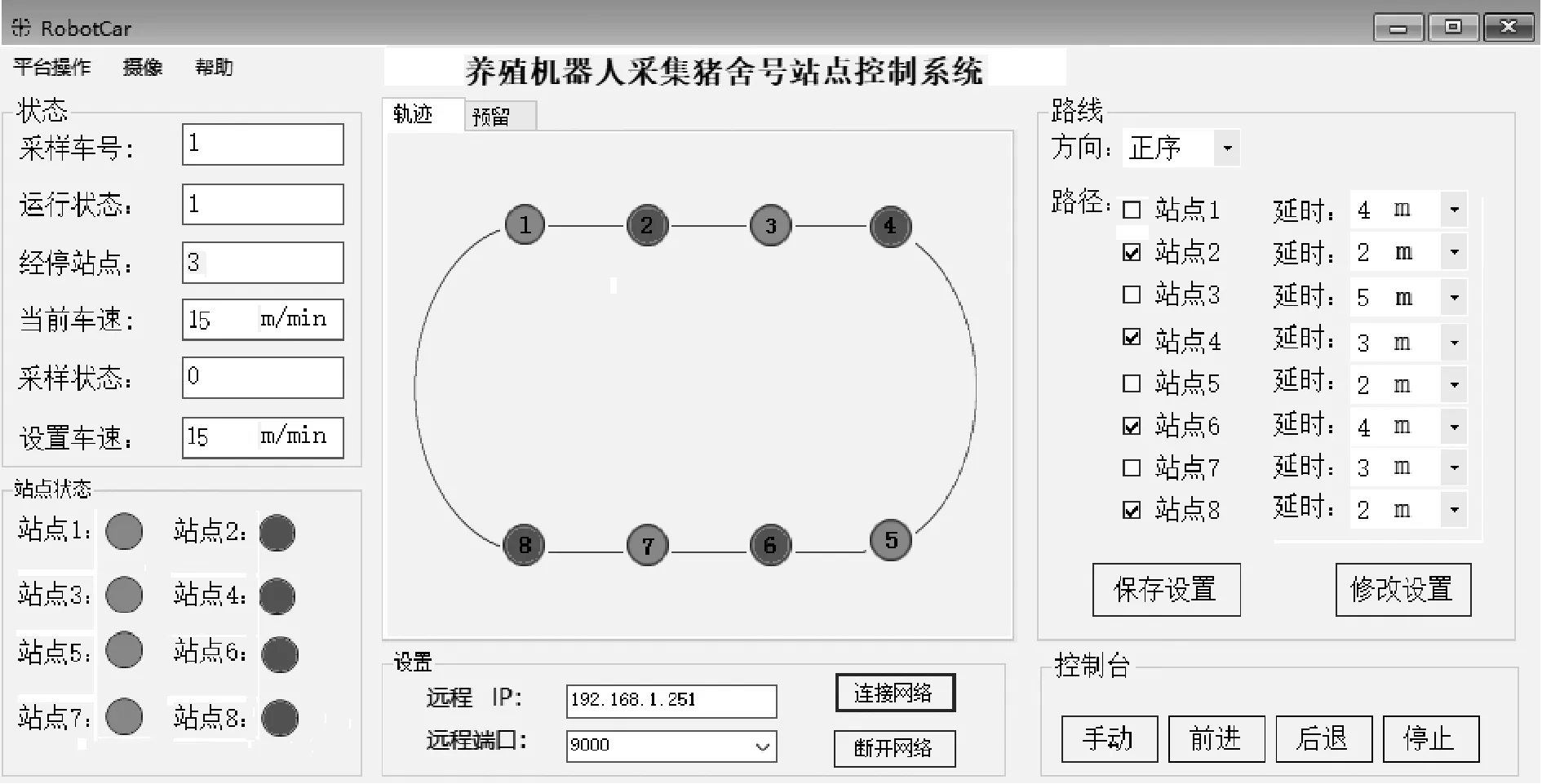
圖9 生豬養(yǎng)殖采樣站點(diǎn)調(diào)控界面Fig.9 Control interface of pig breeding sampling station
為了獲取準(zhǔn)確的異常信息,監(jiān)控PC結(jié)合采集站點(diǎn)位置,借助局部監(jiān)測(cè)裝置攜帶高清攝像機(jī)、環(huán)境感知傳感器、智能耳標(biāo)(體溫、心率、運(yùn)動(dòng)檢測(cè)傳感器)和云臺(tái)操作按鈕控制360°旋轉(zhuǎn)底座和180°二級(jí)機(jī)械臂旋轉(zhuǎn)機(jī)構(gòu)實(shí)現(xiàn)對(duì)局部異常環(huán)境采集、異常豬只圖片抓取和異常行為錄像等功能。監(jiān)控PC機(jī)結(jié)合多感知信息融合技術(shù)和模糊PID控制算法實(shí)現(xiàn)對(duì)異常環(huán)境精準(zhǔn)調(diào)控,結(jié)合豬只行為特征、飼養(yǎng)人員、養(yǎng)殖專家經(jīng)驗(yàn)和大數(shù)據(jù)分析技術(shù)實(shí)現(xiàn)對(duì)豬只異常行為的分析、診斷、評(píng)估與預(yù)警功能。同時(shí)飼養(yǎng)人員也可以結(jié)合豬只行為和生長態(tài)勢(shì)施行科學(xué)養(yǎng)殖管理和疾病預(yù)防,克服傳統(tǒng)人工巡檢效率低、經(jīng)驗(yàn)不足,錯(cuò)過最佳預(yù)防、治療時(shí)期,減少疾病對(duì)生豬品質(zhì)和產(chǎn)量的影響,提高生豬異常識(shí)別的實(shí)時(shí)性和準(zhǔn)確性,為生豬養(yǎng)殖業(yè)健康養(yǎng)殖和疾病預(yù)防提供科學(xué)依據(jù)。生豬健康養(yǎng)殖智能化監(jiān)控界面如圖10所示。
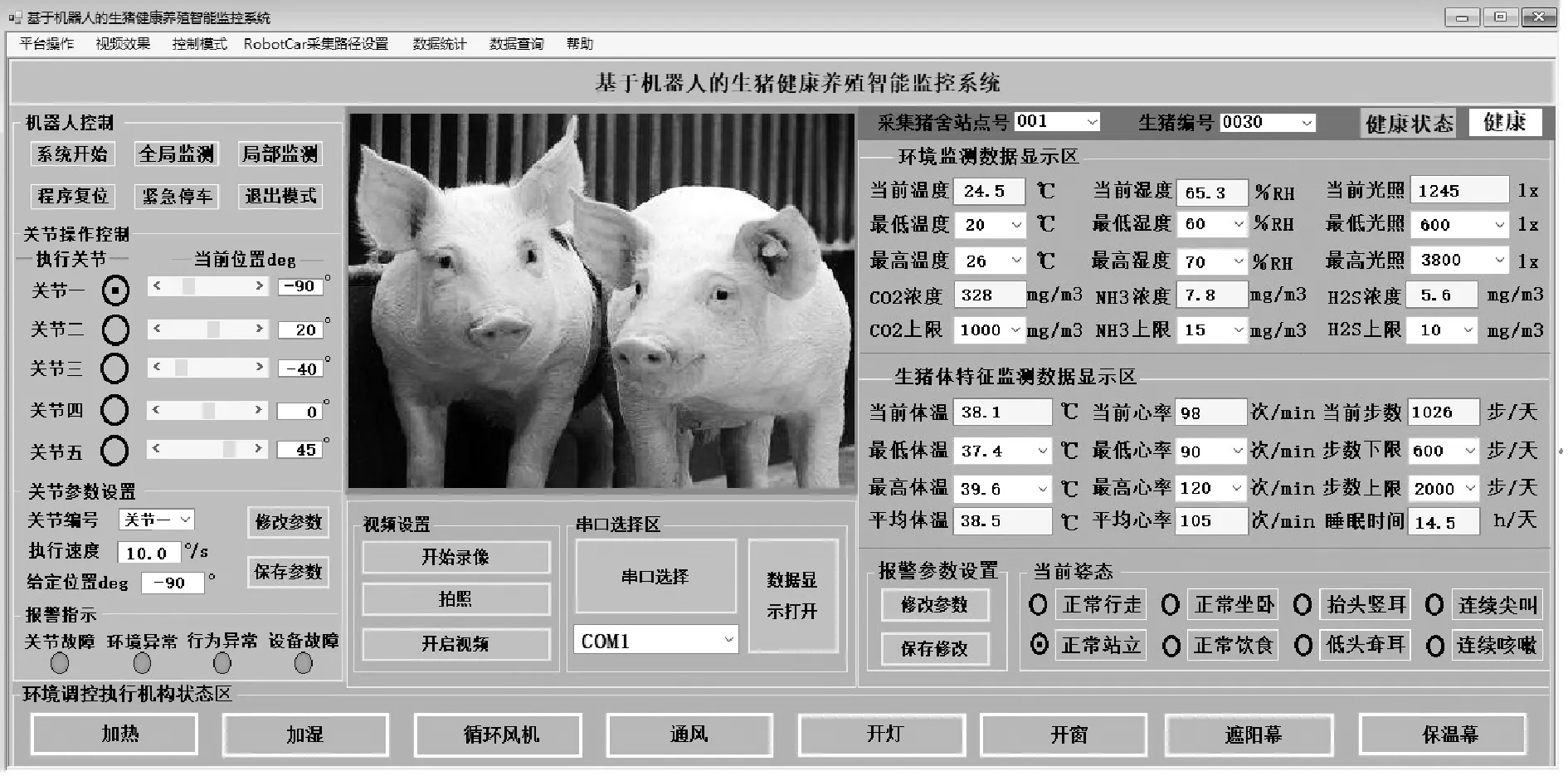
圖10 生豬健康養(yǎng)殖智能化監(jiān)控界面Fig.10 Intelligent monitoring interface for healthy pig breeding
4 試驗(yàn)與結(jié)果分析
為驗(yàn)證該系統(tǒng)的穩(wěn)定性和可靠性,以某養(yǎng)殖基地為測(cè)試現(xiàn)場(chǎng),隨機(jī)選取12個(gè)保育豬舍并以生長環(huán)境溫濕度、光照強(qiáng)度、CO2、NH3和H2S濃度參數(shù)為試驗(yàn)對(duì)象,分析自動(dòng)控制模式下,系統(tǒng)精準(zhǔn)調(diào)控效果。各保育豬舍內(nèi)環(huán)境參數(shù)設(shè)置為:溫度23 ℃,濕度65% RH,光照強(qiáng)度1 200 lx,CO2濃度1 000 mg/m3,NH3濃度10 mg/m3,H2S濃度7 mg/m3。表3為24 h內(nèi)保育豬舍空氣環(huán)境參數(shù)變化情況,其中隨機(jī)采集保育豬舍號(hào)時(shí)間間隔為2 h。
由表3試驗(yàn)采集數(shù)據(jù)與豬舍設(shè)定參數(shù)值對(duì)比可知:24 h內(nèi)樣本采集的溫度、濕度和光照強(qiáng)度平均值分別為23.008 ℃、65.2 %RH和1 202.08 lx,其溫度、濕度和光照強(qiáng)度偏差分別控制在±0.8 ℃、±2.5 % RH和±30 lx范圍內(nèi);24 h內(nèi)采集CO2最大濃度值為876 mg/m3,NH3最大濃度值為8.0 mg/m3,H2S最大濃度值為5.6 mg/m3,均低于國家規(guī)定保育豬舍有害氣體CO2濃度為1 300 mg/m3,NH3濃度為20 mg/m3,H2S濃度為8 mg/m3的行業(yè)標(biāo)準(zhǔn)。為克服每天早晚7:00左右對(duì)豬舍進(jìn)行清糞造成短時(shí)間內(nèi)NH3、H2S濃度過大問題,系統(tǒng)結(jié)合環(huán)境調(diào)控融合算法適當(dāng)加大舍內(nèi)通風(fēng)量,保證豬只長期處于最適應(yīng)生長環(huán)境。

表3 24 h內(nèi)保育豬舍空氣質(zhì)量參數(shù)變化情況Tab.3 Variation of air quality parameters of nursery piggery in 24 hours
為驗(yàn)證模糊PID控制算法對(duì)導(dǎo)軌式移動(dòng)機(jī)器人采集豬舍樣本的定位精度,系統(tǒng)設(shè)有高、中和低三種速度運(yùn)行模式,若相鄰采集站號(hào)與當(dāng)前采集站號(hào)進(jìn)行比較,當(dāng)差值大于等于4站、等于2站或3站和等于1站時(shí)分別啟動(dòng)高速(0.5 m/s)、中速(0.25 m/s)和低速(0.1 m/s)運(yùn)行模式。試驗(yàn)過程中,隨機(jī)抽取10次機(jī)器人實(shí)際停車中心位置和定位地標(biāo)(射頻標(biāo)簽)位置偏差進(jìn)行測(cè)量、記錄,且每次測(cè)量完后均返回初始站點(diǎn)。表4為不同速度模式下的停車定位精度。
由表4可知高速(0.5 m/s)、中速(0.25 m/s)和低速(0.1 m/s)運(yùn)行模式下停車定位誤差分別控制在3≤|ΔSH|≤12 mm、|ΔSM|≤6 mm、|ΔSL|≤3 mm范圍內(nèi),測(cè)試過程中機(jī)器人底盤中心位置攜帶讀卡器能夠準(zhǔn)確識(shí)別定位標(biāo)簽信息,并能結(jié)合導(dǎo)軌上限位開關(guān)快速、平穩(wěn)做出停車動(dòng)作,且沒有發(fā)生脫軌、卡軌道現(xiàn)象,整體定位誤差控制在±12 mm范圍內(nèi),因此,系統(tǒng)采用模糊PID控制算法能夠滿足豬舍樣本采集站的停車定位精度,為快速、準(zhǔn)確獲取豬舍環(huán)境參數(shù)、豬只個(gè)體特征和異常行為狀態(tài)信息提供保障。
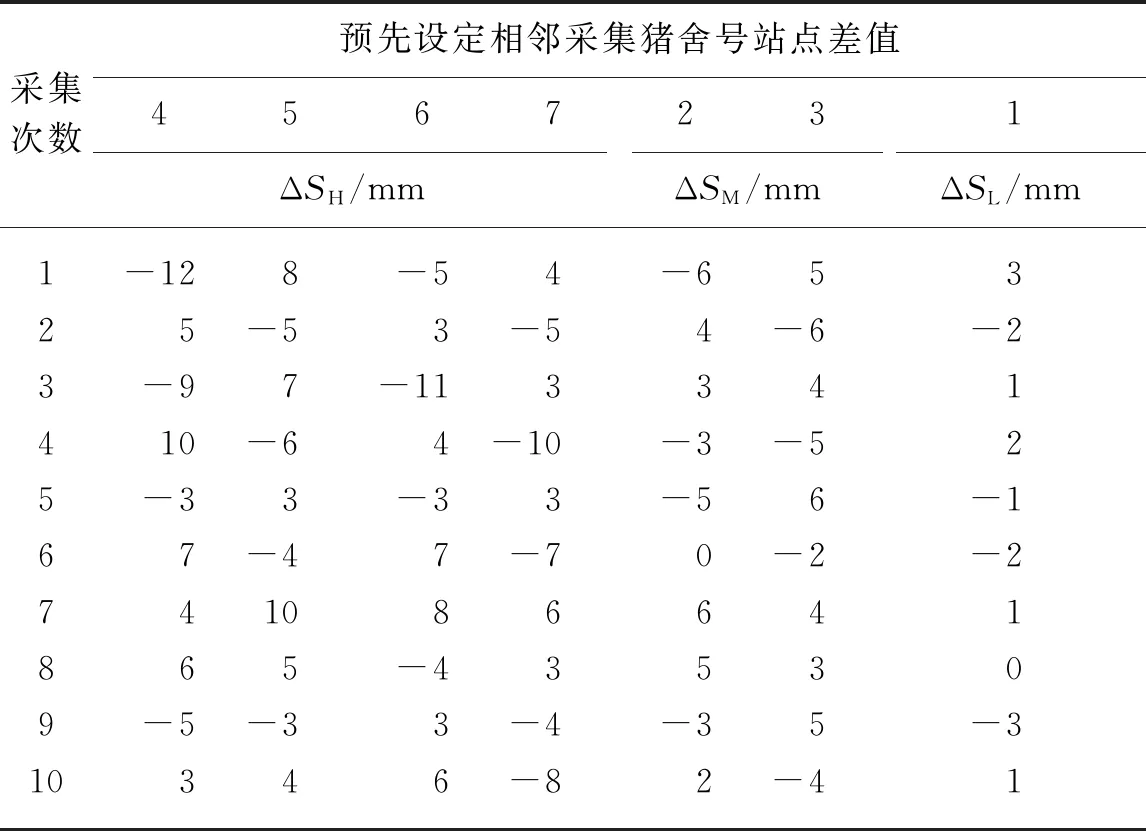
表4 不同速度模式下的停車定位精度Tab.4 Precision of parking location under different speed mode
為驗(yàn)證DT-SVM融合算法對(duì)豬只行為分類可行性,將系統(tǒng)得到的咳嗽、飲食、站立等8種行為特征向量送入Matlab仿真平臺(tái),利用LibSVM工具箱對(duì)特征向量進(jìn)行計(jì)算,并將分類結(jié)果轉(zhuǎn)化數(shù)據(jù)見表5所示。
由表5可知,側(cè)臥和犬坐兩種行為識(shí)別準(zhǔn)確率較高,主要原因是生豬運(yùn)動(dòng)波動(dòng)小容易識(shí)別;站立、饑餓兩種行為識(shí)別準(zhǔn)確率較低,主要原因是生豬站立、饑餓、正臥運(yùn)動(dòng)行為對(duì)應(yīng)三軸加速度數(shù)據(jù)特征值較為接近導(dǎo)致。系統(tǒng)平均豬只運(yùn)動(dòng)行為辨識(shí)準(zhǔn)確率為93.5%,達(dá)到豬只行為分類辨識(shí)目的。
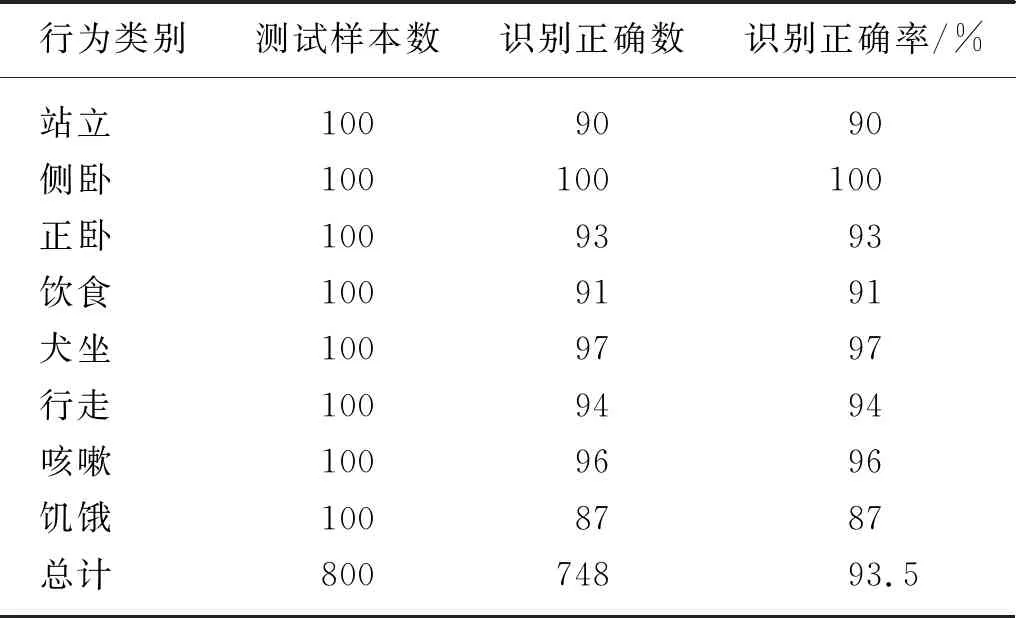
表5 豬只行為識(shí)別分類結(jié)果Tab.5 Classification results of pig behavior recognition
為快速、準(zhǔn)確顯示豬只日常行為,行為監(jiān)測(cè)平臺(tái)結(jié)合豬只姿態(tài)辨識(shí)結(jié)果和豬只體表特征參數(shù)將當(dāng)天豬只姿態(tài)持續(xù)時(shí)間與相鄰前七天更新統(tǒng)計(jì)數(shù)據(jù)進(jìn)行比較[17],當(dāng)豬只體溫和心率均為正常時(shí),數(shù)據(jù)相對(duì)差為20%以內(nèi)為正常,相對(duì)差為20%~40%為一般,相對(duì)差為40%~60%為異常,相對(duì)差為60%以上為嚴(yán)重異常;當(dāng)豬只體溫或心率參數(shù)不正常時(shí),豬只行為至少為異常。同時(shí)后臺(tái)數(shù)據(jù)庫對(duì)異常豬只行為進(jìn)行醒目標(biāo)注,以便提醒飼養(yǎng)技術(shù)人員對(duì)異常豬只及時(shí)處理,為疾病預(yù)防提供科學(xué)依據(jù)。豬只行為評(píng)價(jià)數(shù)據(jù)見表6所示。
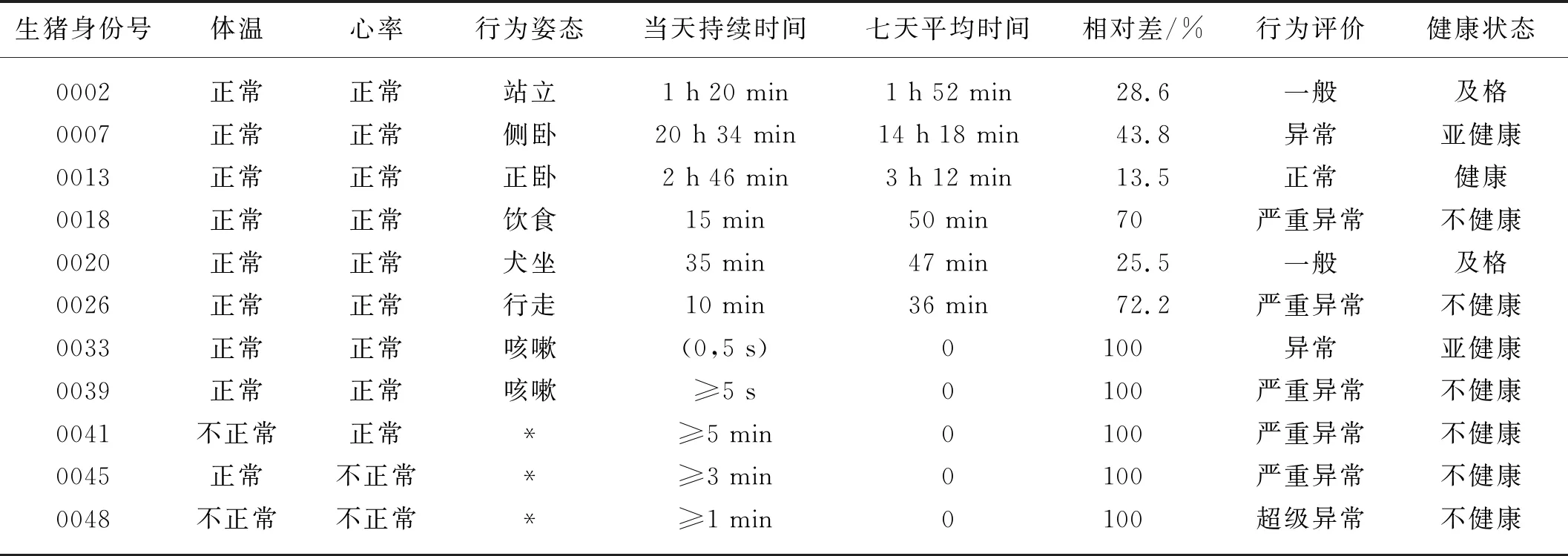
表6 豬只行為識(shí)別評(píng)價(jià)數(shù)據(jù)Tab.6 Pig behavior evaluation data
5 結(jié)論
1)開發(fā)基于機(jī)器人的生豬健康養(yǎng)殖智能監(jiān)控系統(tǒng)能夠借助監(jiān)控PC或手機(jī)APP設(shè)定巡檢路徑依次對(duì)生豬生長過程和行為特征實(shí)時(shí)在線監(jiān)測(cè)。隨機(jī)抽取12個(gè)樣本對(duì)溫濕度、光照、CO2、NH3和H2S濃度環(huán)境參數(shù)進(jìn)行測(cè)試,溫濕度、光照誤差分別控制在±0.8 ℃、±2.5% RH、±30 lx范圍內(nèi),參數(shù)波動(dòng)范圍較小,CO2、NH3和H2S有害氣體濃度分別控制在876 mg/m3、8.0 mg/m3和5.6 mg/m3范圍內(nèi),能夠?yàn)樯i健康提供適宜的生長環(huán)境。
2)結(jié)合導(dǎo)軌、RFID定位和模糊PID控制算法設(shè)計(jì)一種基于導(dǎo)軌式移動(dòng)機(jī)器人二級(jí)聯(lián)動(dòng)采集裝置,能夠?qū)崿F(xiàn)機(jī)器人沿設(shè)定路徑準(zhǔn)確、快速自主采樣功能。隨機(jī)抽取10個(gè)樣本采集點(diǎn)分別以高速(0.5 m/s)、中速(0.25 m/s)和低速(0.1 m/s)三種運(yùn)行模式對(duì)導(dǎo)軌式移動(dòng)機(jī)器人的定位精度和穩(wěn)定性進(jìn)行測(cè)試,定位誤差分別控制在3≤|ΔSH|≤12 mm、|ΔSM|≤6 mm、|ΔSL|≤3 mm范圍內(nèi),整體定位誤差控制在±12 mm范圍內(nèi),且整個(gè)試驗(yàn)過程中沒有發(fā)生跑偏、卡軌道現(xiàn)象,為快速、準(zhǔn)確獲取生豬生長環(huán)境和行為特征信息提供保障。
3)融入音頻、運(yùn)動(dòng)傳感器三軸姿態(tài)采集特征數(shù)據(jù),采用豬只行為識(shí)別TD-SVM融合分類算法,并結(jié)合豬只體特征(體溫、心率)和環(huán)境感知多源融合算法實(shí)現(xiàn)豬只站立、咳嗽等8種行為姿態(tài)識(shí)別,整體識(shí)別正確率為93.5%,可為飼養(yǎng)人員進(jìn)一步分析生豬健康狀況提供數(shù)據(jù)支持。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(bào)(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
