基于模態(tài)規(guī)劃法的履帶拖拉機(jī)車架振動(dòng)分析與優(yōu)化*
2021-09-13 01:22:28扈凱張文毅李坤劉宏俊祁兵紀(jì)要
中國農(nóng)機(jī)化學(xué)報(bào) 2021年8期
扈凱,張文毅,李坤,劉宏俊,祁兵,紀(jì)要
(農(nóng)業(yè)農(nóng)村部南京農(nóng)業(yè)機(jī)械化研究所,南京市,210014)
0 引言
拖拉機(jī)不同于道路作業(yè)機(jī)械,其在田間作業(yè)時(shí)的路面起伏大,且發(fā)動(dòng)機(jī)振動(dòng)劇烈,這會(huì)極大程度地引起車架產(chǎn)生較大幅值的振動(dòng)。強(qiáng)烈的振動(dòng)會(huì)引發(fā)駕駛員疲勞,降低作業(yè)效率,減少機(jī)具使用壽命等一系列問題[1-2]。
近年來,農(nóng)業(yè)機(jī)械減振降噪技術(shù)是行業(yè)研究的熱點(diǎn),主要集中在農(nóng)業(yè)機(jī)械振動(dòng)信號(hào)的處理方法、設(shè)計(jì)參數(shù)對(duì)拖拉機(jī)駕駛平順性的影響、基于電液懸掛系統(tǒng)的農(nóng)業(yè)機(jī)械主動(dòng)減振控制和拖拉機(jī)懸掛農(nóng)機(jī)具對(duì)振動(dòng)特性的影響等領(lǐng)域[3-11]。薛金林等[12]對(duì)輪胎胎壓和車速對(duì)無懸架拖拉機(jī)橫向乘坐振動(dòng)特性進(jìn)行研究,基于橫向加速度功率譜密度、橫向加速度均方根值和總加權(quán)加速度均方根值分析了不同參數(shù)下拖拉機(jī)的乘坐振動(dòng)特性,其研究成果可為拖拉機(jī)多維減振懸架系統(tǒng)設(shè)計(jì)提供參考依據(jù)。袁加奇等[13]對(duì)拖拉機(jī)行駛在不同工作路面條件下的振動(dòng)特性進(jìn)行研究,測試了拖拉機(jī)行駛在水田、小麥秸稈田、稻秸稈田和田間道路四種不同的農(nóng)田道路上的振動(dòng)加速度,該研究可為后期設(shè)計(jì)適合國內(nèi)路面情況的拖拉機(jī)減振裝置提供理論依據(jù)。徐立章等[14]測試與分析了履帶式全喂入水稻聯(lián)合收獲機(jī)振動(dòng)參數(shù),獲取了振動(dòng)篩、風(fēng)機(jī)、脫粒滾筒、切割器等位置的激勵(lì)頻率,研究成果可為改善履帶式行走機(jī)械駕駛舒適性和提高工作部件可靠性提供理論依據(jù)。
本文以分析優(yōu)化履帶式拖拉機(jī)振動(dòng)特性為研究目標(biāo),測試田間行駛工況下的拖拉機(jī)車架振動(dòng)時(shí)域參數(shù),采用傅里葉變化分析線性自功率譜峰值振動(dòng)的對(duì)應(yīng)頻率。建立車架有限元模型,獲取了模態(tài)頻率及模態(tài)振型,并基于模態(tài)規(guī)劃法和響應(yīng)面法進(jìn)行模態(tài)頻率的優(yōu)化。本文的研究結(jié)論可對(duì)拖拉機(jī)車架減振優(yōu)化提供理論基礎(chǔ)。
1 拖拉機(jī)車架振動(dòng)測試
1.1 車架振動(dòng)測試試驗(yàn)
試驗(yàn)以44.1 kW履帶式拖拉機(jī)為測試對(duì)象,在水稻收獲后的稻茬田進(jìn)行振動(dòng)數(shù)據(jù)動(dòng)態(tài)采集。以1A314E型三向壓電式加速度傳感器為檢測元件,選用32通道東華DH5902堅(jiān)固性動(dòng)態(tài)數(shù)據(jù)采集分析儀進(jìn)行車架振動(dòng)數(shù)據(jù)采集。試驗(yàn)過程中,將加速度傳感器通過磁吸方式安裝在車架上,測試采集履帶拖拉機(jī)行駛過程中的振動(dòng)信號(hào),試驗(yàn)照片如圖1所示。

圖1 振動(dòng)測試試驗(yàn)Fig.1 Vibration measurement experiment
根據(jù)香農(nóng)采樣定理,當(dāng)采樣頻率不小于分析帶寬(奈奎斯特頻率)的2.56倍時(shí),采樣信號(hào)不會(huì)發(fā)生混疊現(xiàn)象。試驗(yàn)設(shè)置的采樣頻率為512 Hz,即可以分析帶寬200 Hz以內(nèi)的頻譜。
1.2 測試參數(shù)分析
將采集的時(shí)域加速度信號(hào)進(jìn)行傅里葉變化以獲取頻譜參數(shù),為防止信號(hào)截?cái)噙^程中的泄露效應(yīng),對(duì)頻域信號(hào)加漢寧窗。采用線性自功率譜進(jìn)行數(shù)據(jù)分析,線性自功率譜含有信號(hào)的幅值信息,相位信息在進(jìn)行復(fù)數(shù)域共軛計(jì)算的過程中被消除。
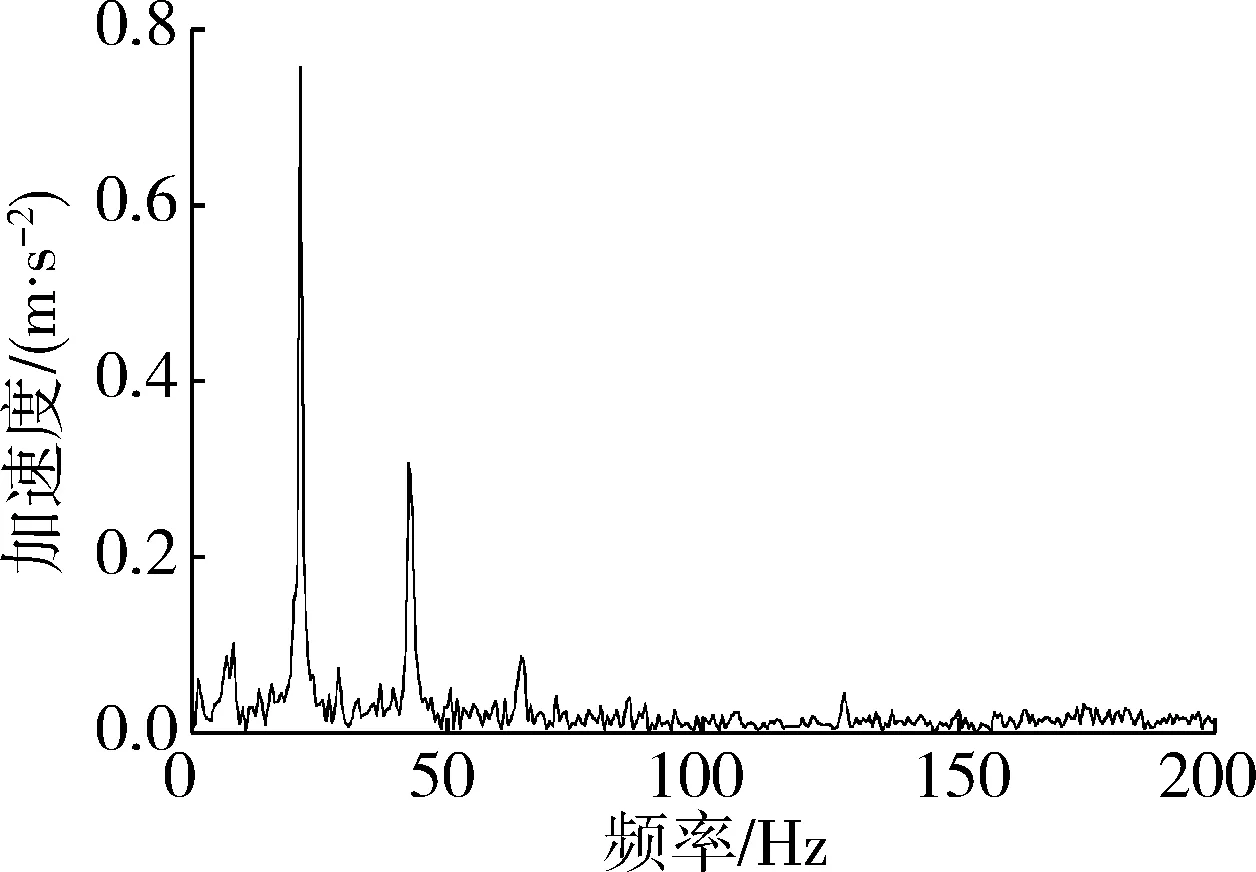
車架X、Y、Z三個(gè)方向的加速度頻譜如圖2所示,X方向?yàn)橥侠瓩C(jī)縱向(與前進(jìn)速度平行方向),Y方向?yàn)橥侠瓩C(jī)橫向(與前進(jìn)速度垂直方向),Z方向?yàn)橥侠瓩C(jī)垂直方向。
由圖2可知,X方向振動(dòng)在21.25 Hz和42.5 Hz處出現(xiàn)峰值,對(duì)應(yīng)的振動(dòng)加速度分別是0.756 m/s2和0.307 m/s2;Y方向振動(dòng)在8.125 Hz、21.25 Hz和42.5 Hz處出現(xiàn)峰值,對(duì)應(yīng)的振動(dòng)加速度分別是0.267 m/s2、0.582 m/s2和0.547 m/s2;Z方向振動(dòng)在8.125 Hz、21.25 Hz和85.625 Hz處出現(xiàn)峰值,對(duì)應(yīng)的振動(dòng)加速度分別是0.564 m/s2、0.299 m/s2和0.387 m/s2。
(a)X方向
2 車架模態(tài)分析
2.1 有限元建模
對(duì)所測試的履帶拖拉機(jī)車架進(jìn)行參數(shù)測量并建立其三維模型,車架長寬高尺寸分別是2 190 mm、1 042 mm、380 mm。有限元模型建立過程中,對(duì)車架三維模型進(jìn)行適當(dāng)簡化(圖3),如將小半徑的圓角簡化為直角等。總體網(wǎng)格尺寸設(shè)置為4 mm,在薄壁處設(shè)置至少3層網(wǎng)格,網(wǎng)格階次設(shè)置為三角形或四面體網(wǎng)格。
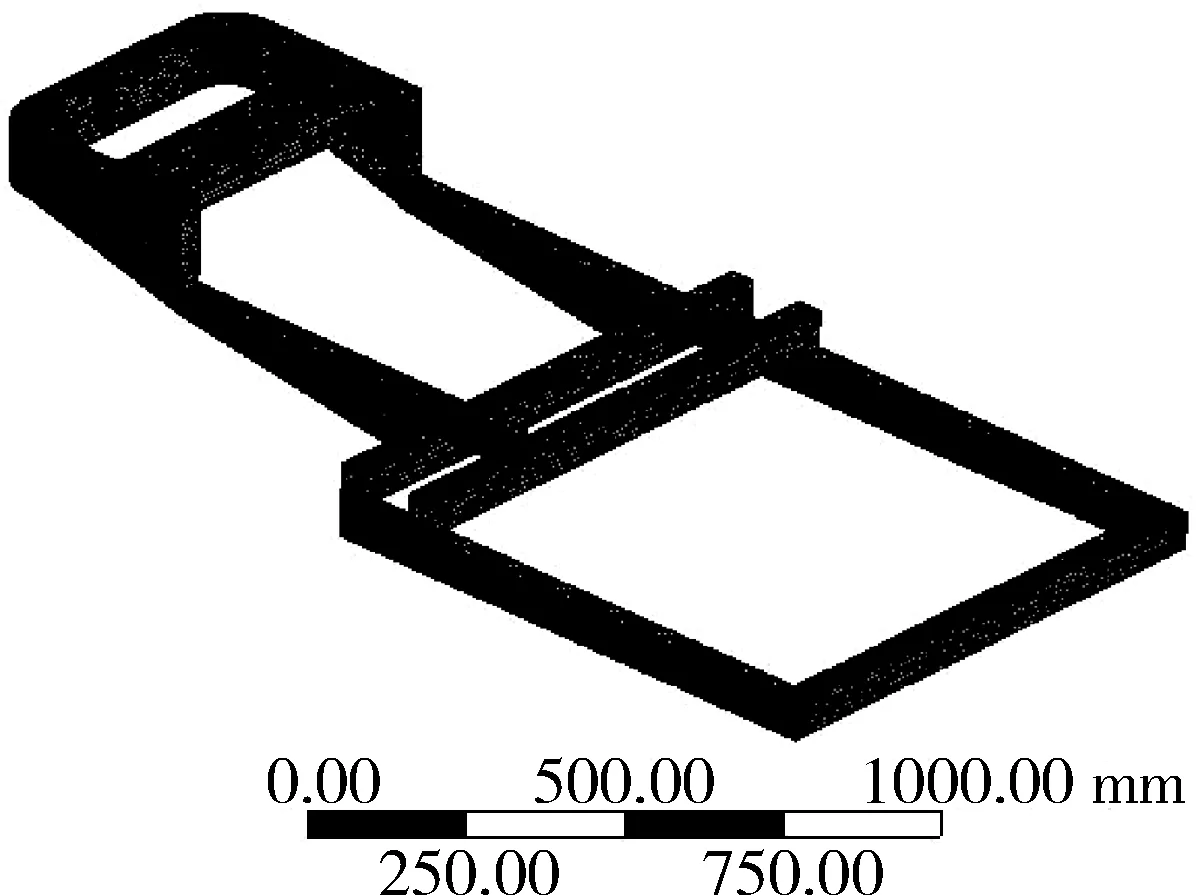
圖3 車架有限元模型Fig.3 Finite element model of frame
網(wǎng)格總量為17.79萬個(gè),節(jié)點(diǎn)數(shù)為32.85萬個(gè)。采用網(wǎng)格質(zhì)量檢測與分析可知,質(zhì)量高于0.75(質(zhì)量1最佳)以上的網(wǎng)格占比超過80%,滿足分析要求。
2.2 模態(tài)分析
對(duì)車架與底盤焊接的4個(gè)位置施加固定約束,分析其前10階模態(tài),模態(tài)頻率和振型方向分布如表1所示。
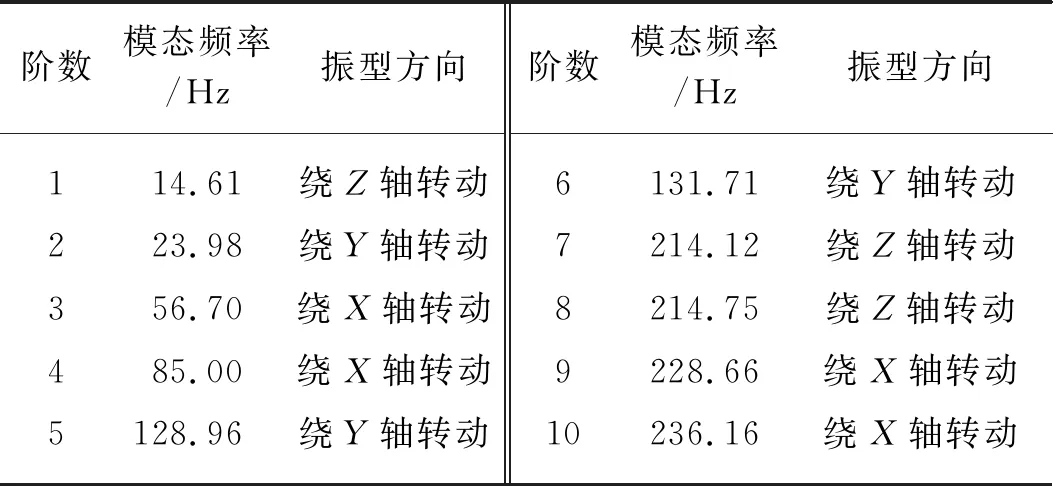
表1 模態(tài)頻率和振型方向Tab.1 Modal frequency and vibration direction
車架的固有頻率應(yīng)該避開振動(dòng)激勵(lì)峰值頻率3 Hz 以上才可以有效避免共振[15],但第2階23.98 Hz和第4階固有頻率85.00 Hz與振動(dòng)激勵(lì)峰值頻率(21.25 Hz和85.625 Hz)之間的差值均小于3 Hz,故外部激勵(lì)可能引起車架較大的振動(dòng),降低車架的使用壽命和駕駛員乘坐舒適度。
3 基于模態(tài)規(guī)劃法的車架模態(tài)優(yōu)化
模態(tài)規(guī)劃是指在設(shè)計(jì)初期,使結(jié)構(gòu)具有給定的模態(tài)頻率或模態(tài)振型。為進(jìn)一步降低車架振動(dòng)幅值,優(yōu)化乘坐舒適性,采用模態(tài)規(guī)劃法對(duì)車架模態(tài)進(jìn)行優(yōu)化。考慮到車架與底盤連接處均位于車架的縱向后側(cè)位置,故采取增加支撐梁的方式加強(qiáng)車架縱向前側(cè)的剛度,繼而提升車架的模態(tài)頻率。優(yōu)化目標(biāo)有兩個(gè):(1)車架的各階固有頻率避開振動(dòng)激勵(lì)峰值頻率3 Hz以上;(2)車架的固有頻率應(yīng)盡可能大以避免低頻激勵(lì)引發(fā)共振。
3.1 響應(yīng)面試驗(yàn)參數(shù)選取
在車架橫向前側(cè)增加兩根方形支撐梁,選擇兩根支撐梁之間間距、支撐梁壁厚、支撐梁邊長三個(gè)參數(shù)作為試驗(yàn)因素A、B和C,各試驗(yàn)因素如圖4所示。各因素的取值范圍如式(1)所示。

圖4 試驗(yàn)因素示意圖Fig.4 Schematic diagram of test factors
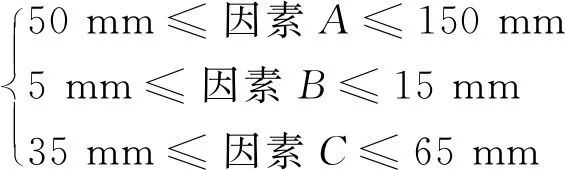
(1)
3.2 響應(yīng)面結(jié)果分析
采用Box-behnken方法進(jìn)行試驗(yàn)方案設(shè)計(jì),通過二階回歸方程對(duì)參數(shù)進(jìn)行擬合,試驗(yàn)參數(shù)設(shè)置及結(jié)果如表2所示。各個(gè)因素對(duì)第2階模態(tài)頻率和第4階模態(tài)頻率的統(tǒng)計(jì)學(xué)分析如表3所示。

表2 響應(yīng)面分析試驗(yàn)結(jié)果Tab.2 Experimental results of response surface method
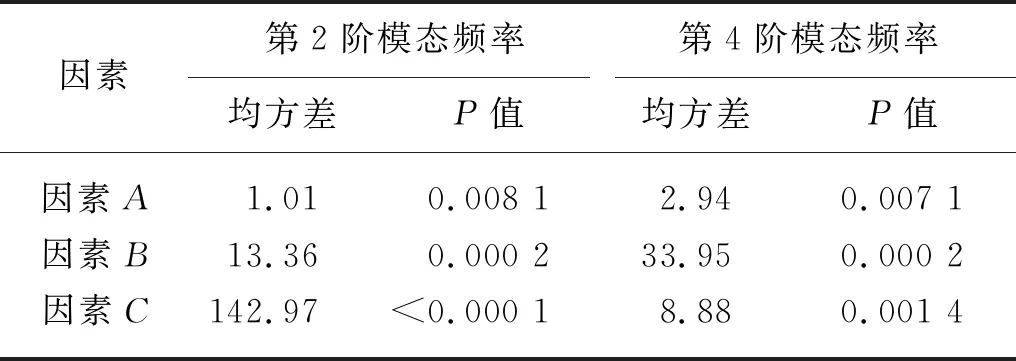
表3 各因素統(tǒng)計(jì)參數(shù)Tab.3 Statistical parameters of each factor
根據(jù)統(tǒng)計(jì)學(xué)理論可知,如果P值小于等于0.05,則表明該因素對(duì)目標(biāo)參數(shù)影響顯著,如果P值小于等于0.01,則表明該因素對(duì)目標(biāo)參數(shù)影響極其顯著。對(duì)于第2階和第4階模態(tài)頻率,三個(gè)因素對(duì)其影響均極其顯著,但因素B和因素C的影響程度更大。
各個(gè)因素對(duì)第2階模態(tài)頻率和第4階模態(tài)頻率的響應(yīng)面如圖5、圖6所示。
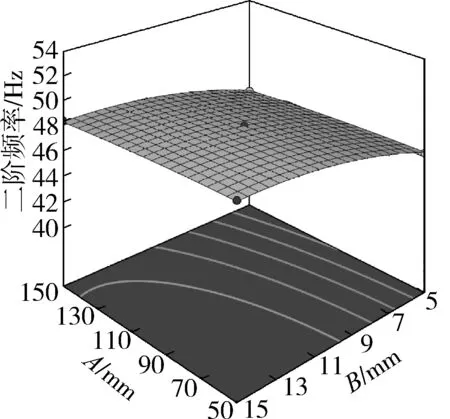
(a)因素C=50 mm
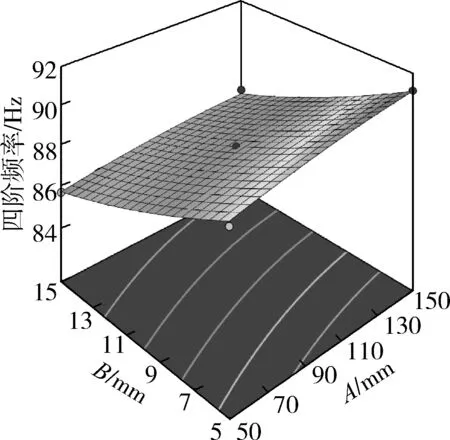
(a)因素C=50 mm
由圖5可知,因素A對(duì)第2階固有頻率影響不大,隨著因素A增加,第2階固有頻率降低,但降低程度較小,因素B對(duì)第2階固有頻率影響較為明顯,第2階固有頻率隨著因素B的增加而變大,當(dāng)因素B超過13 mm 且繼續(xù)變大時(shí),第2階固有頻率增加幅度較小,第2階固有頻率受因素C影響程度較大,且隨著因素C的變大快速上升,這表明了因素C的增加可有效加強(qiáng)車架的橫向剛度。由圖6可知,第4階固有頻率隨著因素A的增加而變大,但增加幅度較小,隨著因素B、因素C的增加而下降,且沿因素B方向變化最為劇烈,這表明因素B對(duì)第四階固有頻率影響最為顯著。
3.3 最優(yōu)化求解
為尋求最佳模態(tài)參數(shù),以因素A、B、C為變量,以第2階固有頻率和第4階固有頻率為目標(biāo)參數(shù),優(yōu)化目標(biāo)由式(2)表示,因素變量約束條件與式(1)一致。

(2)
求解可知,當(dāng)因素A、因素B和因素C分別為149.9 mm,5.01 mm和65 mm時(shí),目標(biāo)函數(shù)為最優(yōu)解,在此條件下,第2階固有頻率和第4階固有頻率的理論值分別為49.5 Hz和90.9 Hz。
4 最優(yōu)解驗(yàn)證
為驗(yàn)證理論最優(yōu)解的準(zhǔn)確性,根據(jù)因素A、因素B和因素C分別為149.9 mm,5.01 mm和65 mm的參數(shù)建模,在有限元軟件中進(jìn)行模態(tài)求解,求解獲取的第2階固有頻率和第4階固有頻率分別為48.53 Hz和89.97 Hz,對(duì)應(yīng)的誤差率分別是1.99%和1.03%,優(yōu)化方案具有較高的求解精度。
車架第2階和第4階振型分別如圖7和圖8所示。
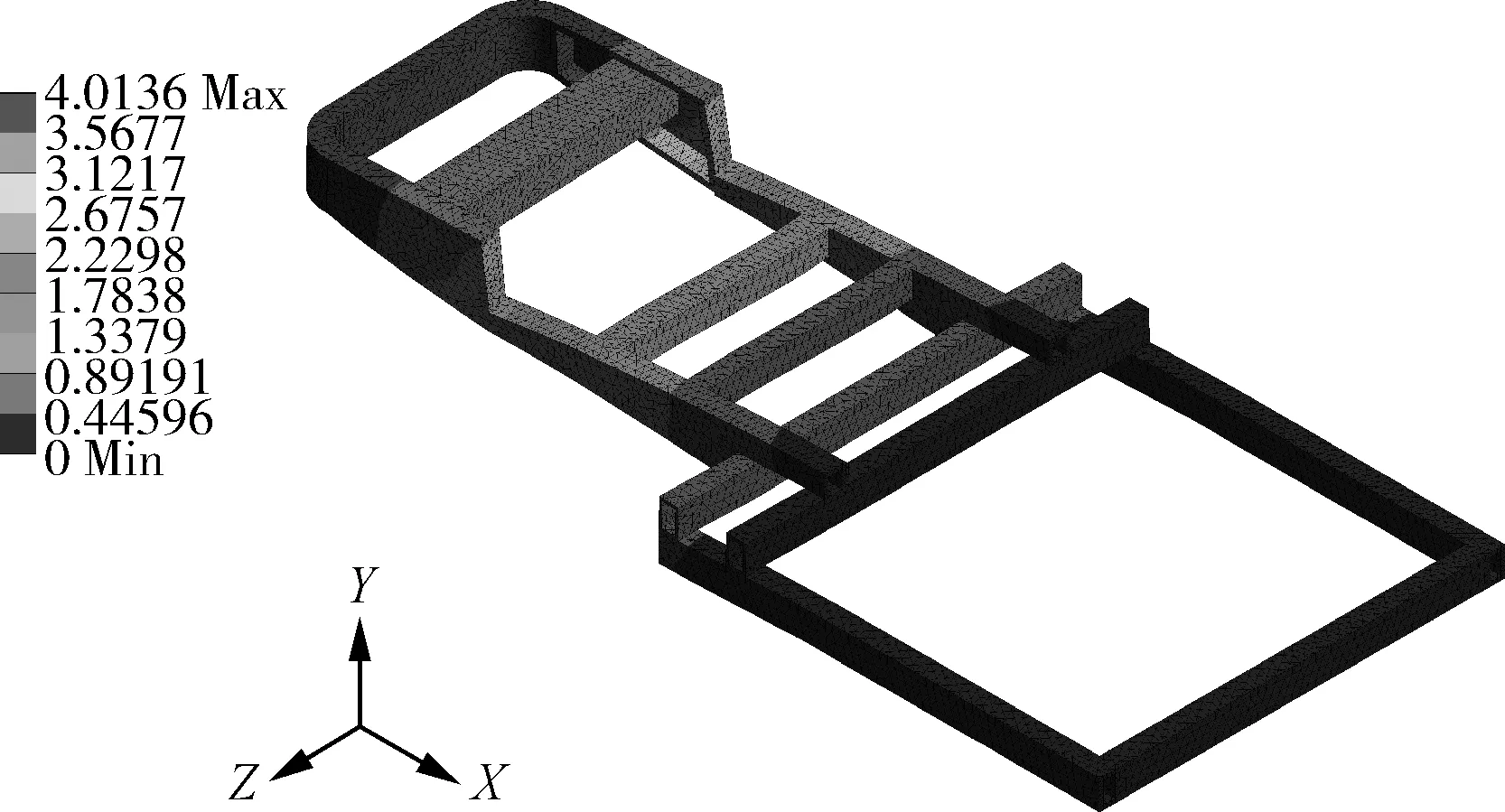
圖7 第2階模態(tài)振型Fig.7 Modal vibration shape of second-order modal
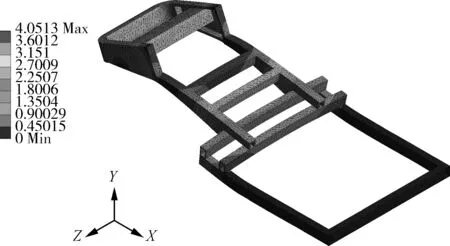
圖8 第4階模態(tài)振型Fig.8 Modal vibration shape of fourth-order modal
車架的第2階模態(tài)振型振動(dòng)最大位置在車架前側(cè),振動(dòng)幅值從前向后依次降低,振型方向?yàn)槔@Y軸轉(zhuǎn)動(dòng),車架的第4階模態(tài)振型振動(dòng)最大位置在車架中部,前側(cè)次之,振型方向?yàn)槔@Z軸轉(zhuǎn)動(dòng)。橫向方向支撐梁可有效地提高第2階模態(tài)頻率,對(duì)第4階模態(tài)頻率的提升幅度相對(duì)較小,且第2階模態(tài)振型的方向未發(fā)生變化,但第4階模態(tài)振型以由原先的繞X軸轉(zhuǎn)動(dòng)變換為繞Z軸轉(zhuǎn)動(dòng)。需要注意的是,模態(tài)振型中的振動(dòng)幅值并不是真實(shí)的變形,其僅表示振動(dòng)相對(duì)值的大小。
5 結(jié)論
為降低履帶式拖拉機(jī)的車架振動(dòng),優(yōu)化駕駛舒適性,本文開展了基于模態(tài)規(guī)劃法的履帶拖拉機(jī)車架振動(dòng)分析與優(yōu)化研究,研究結(jié)論如下。
1)進(jìn)行了田間行駛工況下的拖拉機(jī)車架振動(dòng)參數(shù)測試,將時(shí)域數(shù)據(jù)進(jìn)行傅里葉變換后可知,X方向振動(dòng)在21.25 Hz和42.5 Hz處出現(xiàn)峰值,Y方向振動(dòng)在8.125 Hz、21.25 Hz和42.5 Hz處出現(xiàn)峰值,Z方向振動(dòng)在8.125 Hz、21.25 Hz和85.625 Hz處出現(xiàn)峰值。
2)測繪履帶拖拉機(jī)車架并建立其有限元模型,分析前10階模態(tài),結(jié)果表明第2階固有頻率23.98 Hz和第4階固有頻率85.00 Hz與振動(dòng)激勵(lì)峰值頻率之間的差值均小于3 Hz,不滿足設(shè)計(jì)要求,外部激勵(lì)可能引起車架較大的振動(dòng)。
3)基于模態(tài)規(guī)劃法和響應(yīng)面法優(yōu)化車架模態(tài)參數(shù),選取兩根支撐梁之間間距、支撐梁壁厚、支撐梁邊長三個(gè)參數(shù)作為試驗(yàn)因素A、B和C,采用Box-behnken方法進(jìn)行試驗(yàn)方案設(shè)計(jì),通過二階回歸方程對(duì)參數(shù)進(jìn)行擬合。研究發(fā)現(xiàn),對(duì)于第2階模態(tài)頻率,三個(gè)因素影響程度由高到低排序依次為:因素C、因素B、因素A,而對(duì)于第4階模態(tài)頻率,三個(gè)因素影響程度由高到低排序依次為:因素B、因素C、因素A。
4)當(dāng)因素A、因素B和因素C分別為149.90 mm,5.01 mm和65.00 mm時(shí),第2階和第4階模態(tài)頻率為最優(yōu)解。通過有限元仿真驗(yàn)證,第2階固有頻率和第4階固有頻率分別為48.53 Hz和89.97 Hz,對(duì)應(yīng)的誤差率分別是1.99%和1.03%,優(yōu)化方案具有較高的求解精度。最終,車架振動(dòng)參數(shù)得以優(yōu)化。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
小天使·一年級(jí)語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
計(jì)算物理(2014年2期)2014-03-11 17:01:44
