改進(jìn)果蠅優(yōu)化算法的磁流變發(fā)動(dòng)機(jī)懸置振動(dòng)控制策略研究
2021-09-14 02:46:18申玉瑞華德正王寧寧劉曉帆劉新華
申玉瑞,華德正,王寧寧,劉曉帆,劉新華,3
(1.中國(guó)礦業(yè)大學(xué) 機(jī)電工程學(xué)院, 江蘇 徐州 221116;2.中國(guó)煤炭教育協(xié)會(huì), 北京 100713; 3.姜堰經(jīng)濟(jì)開(kāi)發(fā)區(qū)科創(chuàng)中心, 江蘇 泰州 225500)
隨著現(xiàn)代汽車(chē)設(shè)計(jì)朝著小型、大功率發(fā)動(dòng)機(jī)方向發(fā)展,以及輕量化材料的開(kāi)發(fā)使用,汽車(chē)噪聲逐漸成為不可忽視的一大問(wèn)題,而引起汽車(chē)噪聲的主要來(lái)源之一便是動(dòng)力總成。發(fā)動(dòng)機(jī)懸置系統(tǒng)可有效抑制動(dòng)力總成本身的振動(dòng)及動(dòng)力總成向車(chē)身傳遞的振動(dòng),從而提高汽車(chē)乘坐舒適性[1]。發(fā)動(dòng)機(jī)液壓懸置分為被動(dòng)式液壓懸置、主動(dòng)式液壓懸置和半主動(dòng)式[2]液壓懸置3種。其中,被動(dòng)式液壓懸置利用流體的粘性和慣性效應(yīng)來(lái)滿足大動(dòng)態(tài)范圍的剛度要求[3],因此被動(dòng)式液壓懸置在低頻共振區(qū)可以表現(xiàn)出良好的控制性能,但在非共振和高頻區(qū)域的表現(xiàn)較差。主動(dòng)式液壓懸置可以在不同工作要求下提供良好的隔振效果,但其復(fù)雜的結(jié)構(gòu)、較高的能耗和成本限制了主動(dòng)式液壓懸置在工業(yè)領(lǐng)域的廣泛應(yīng)用。而半主動(dòng)式液壓懸置在有效避免兩者缺點(diǎn)的同時(shí),又兼具了兩者的優(yōu)點(diǎn),因此本文采用半主動(dòng)式液壓懸置[4],具體地說(shuō),是一種基于磁流變液的半主動(dòng)式液壓懸置[5-7]。
磁流變液是一種固-液兩相智能材料,其表觀粘度可隨外加磁場(chǎng)的變化而變化。磁流變液自問(wèn)世以來(lái),研究人員對(duì)磁流變液本身特性及在汽車(chē)工業(yè)等多領(lǐng)域的潛在應(yīng)用進(jìn)行了大量研究。就應(yīng)用角度而言,磁流變液主要應(yīng)用于振動(dòng)控制部件或者系統(tǒng):汽車(chē)懸掛系統(tǒng)[8-9]、駕駛員座椅懸掛系統(tǒng)[10]、橋梁振動(dòng)[11]、建筑隔震[12]、其他柔性結(jié)構(gòu)[13]。然而,由于磁流變液磁性顆粒的磁滯現(xiàn)象及流體的滯后特性等原因,使磁流變液具有強(qiáng)非線性特性,因此需要建立一種可預(yù)測(cè)的控制方法,以保證磁流變懸置快速準(zhǔn)確地響應(yīng)和動(dòng)作。
PID控制器以其控制效果顯著、控制簡(jiǎn)單、適用范圍廣等優(yōu)點(diǎn),在工業(yè)中得到了廣泛應(yīng)用。胥良等[14]采用基于神經(jīng)網(wǎng)絡(luò)算法改進(jìn)非線性PID控制,對(duì)礦井提升機(jī)的控制策略進(jìn)行了研究。此外,還有采用自適應(yīng)模糊控制[15]、蜻蜓算法[16]、神經(jīng)網(wǎng)絡(luò)[17]和遺傳算法[18]等對(duì)PID參數(shù)進(jìn)行調(diào)整。研究結(jié)果表明,與這些算法相結(jié)合的控制器相較于傳統(tǒng)的PID控制器其控制效果有著明顯的提升。然而隨著人們對(duì)控制效果要求的提高,簡(jiǎn)單地將優(yōu)化算法應(yīng)用于PID控制器已經(jīng)不能滿足需求,于是改進(jìn)算法成為了研究人員的熱點(diǎn)研究方向之一。Tavakoli 等[19]提出了一種帶PID開(kāi)關(guān)面的自適應(yīng)自整定PID模糊滑模控制器,并用于抑制電力系統(tǒng)振蕩。Sheng 等[20]將FOA用于調(diào)整電子節(jié)氣門(mén)的分?jǐn)?shù)階模糊PID控制器的參數(shù)。Li等[21]提出了一種新的改進(jìn)的飛行優(yōu)化算法(MFOA)來(lái)確定PID控制器參數(shù),仿真結(jié)果表明:MFOA-PID控制器優(yōu)于FOA-PID控制器。Tian等[22]提出了另外一種改進(jìn)的果蠅優(yōu)化算法,采用一種新的慣性權(quán)函數(shù),通過(guò)動(dòng)態(tài)調(diào)整搜索范圍來(lái)平衡全局搜索和局部微調(diào)。李強(qiáng)等[23]設(shè)計(jì)了微重力環(huán)境下的磁流變傳動(dòng)裝置,提出了一種自適應(yīng)模糊PID控制策略,有效減小了傳動(dòng)系統(tǒng)的速度波動(dòng),提高了運(yùn)動(dòng)穩(wěn)定性。
基于以上研究,本文以磁流變發(fā)動(dòng)機(jī)懸置系統(tǒng)為研究對(duì)象,首先,分別建立其參數(shù)化動(dòng)力學(xué)模型與非參數(shù)化動(dòng)力學(xué)模型。通過(guò)簡(jiǎn)化懸置系統(tǒng)結(jié)構(gòu)建立其動(dòng)力學(xué)方程;利用神經(jīng)網(wǎng)絡(luò)算法建立磁流變發(fā)動(dòng)機(jī)懸置的正向、逆向非參數(shù)化辨識(shí)模型。其次,將改進(jìn)的果蠅優(yōu)化算法(IFOA)應(yīng)用于磁流變懸置PID控制器的參數(shù)調(diào)整,從而提高磁流變發(fā)動(dòng)機(jī)的隔振性能,有效降低車(chē)身的振動(dòng)位移和振動(dòng)加速度。最后,建立相應(yīng)的動(dòng)態(tài)特性實(shí)驗(yàn)和振動(dòng)控制仿真實(shí)驗(yàn)以驗(yàn)證所提控制策略的有效性。
1 磁流變發(fā)動(dòng)機(jī)懸置系統(tǒng)模型
1.1 磁流變發(fā)動(dòng)機(jī)懸置參數(shù)化動(dòng)力學(xué)模型
發(fā)動(dòng)機(jī)在空間表現(xiàn)為6自由度的受約束系統(tǒng),經(jīng)由多個(gè)具有三向剛度和阻尼的懸置支承安裝在車(chē)架上。現(xiàn)代懸置系統(tǒng)設(shè)計(jì)方法已經(jīng)能在很大程度上實(shí)現(xiàn)振動(dòng)系統(tǒng)各階模態(tài)的解耦[24]。因此,僅研究磁流變發(fā)動(dòng)機(jī)懸置在垂直方向上的阻尼可控,且不考慮路面不平度的輸入。如圖1所示,將發(fā)動(dòng)機(jī)懸置系統(tǒng)簡(jiǎn)化為垂直方向的單自由度系統(tǒng)模型。
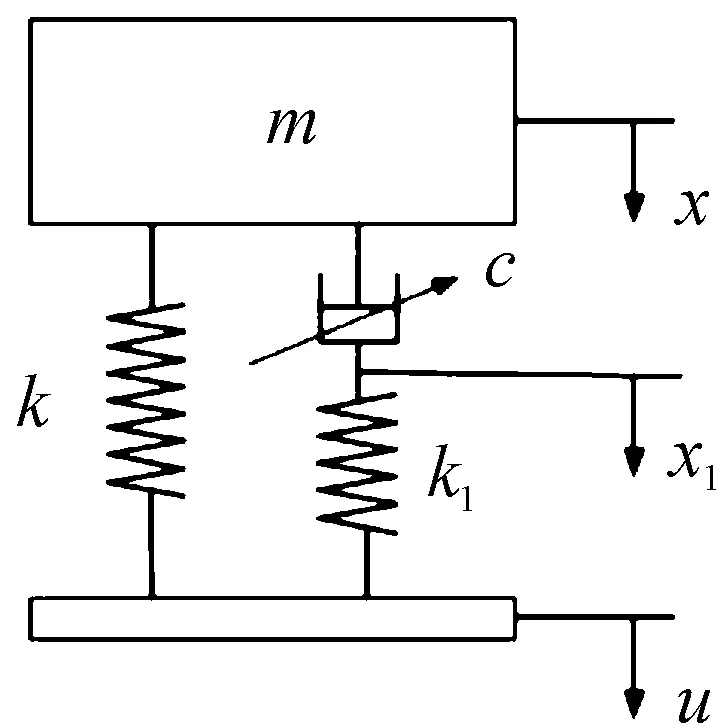
圖1 懸置系統(tǒng)垂直方向動(dòng)力學(xué)模型示意圖
如圖1所示,動(dòng)力總成的質(zhì)量和位移分別為m、x,懸置系統(tǒng)在垂直方向上的剛度為k,磁流變液壓懸置的等效阻尼由彈性系數(shù)k1的彈簧和粘性阻尼系數(shù)c的麥克斯韋單元表示。車(chē)架的位移為u,懸置與附加彈簧連接點(diǎn)的位移為x1。對(duì)其進(jìn)行動(dòng)力學(xué)分析:
(1)
1.2 磁流變發(fā)動(dòng)機(jī)懸置非參數(shù)動(dòng)力學(xué)模型
神經(jīng)網(wǎng)絡(luò)可以通過(guò)輸入的數(shù)據(jù)進(jìn)行大量的模擬訓(xùn)練,在大量學(xué)習(xí)的基礎(chǔ)上可以逼近目標(biāo)函數(shù),因此利用Elman神經(jīng)網(wǎng)絡(luò)來(lái)建立磁流變懸置的非參數(shù)動(dòng)力學(xué)模型。設(shè)計(jì)磁流變懸置動(dòng)態(tài)特性實(shí)驗(yàn)以獲得神經(jīng)網(wǎng)絡(luò)所需的訓(xùn)練數(shù)據(jù)。取激振頻率為15 Hz,振幅為5 mm,分別施加0.5、1.5、3 A的電流,所建立的磁流變懸置動(dòng)態(tài)特性實(shí)驗(yàn)裝置如圖2所示。
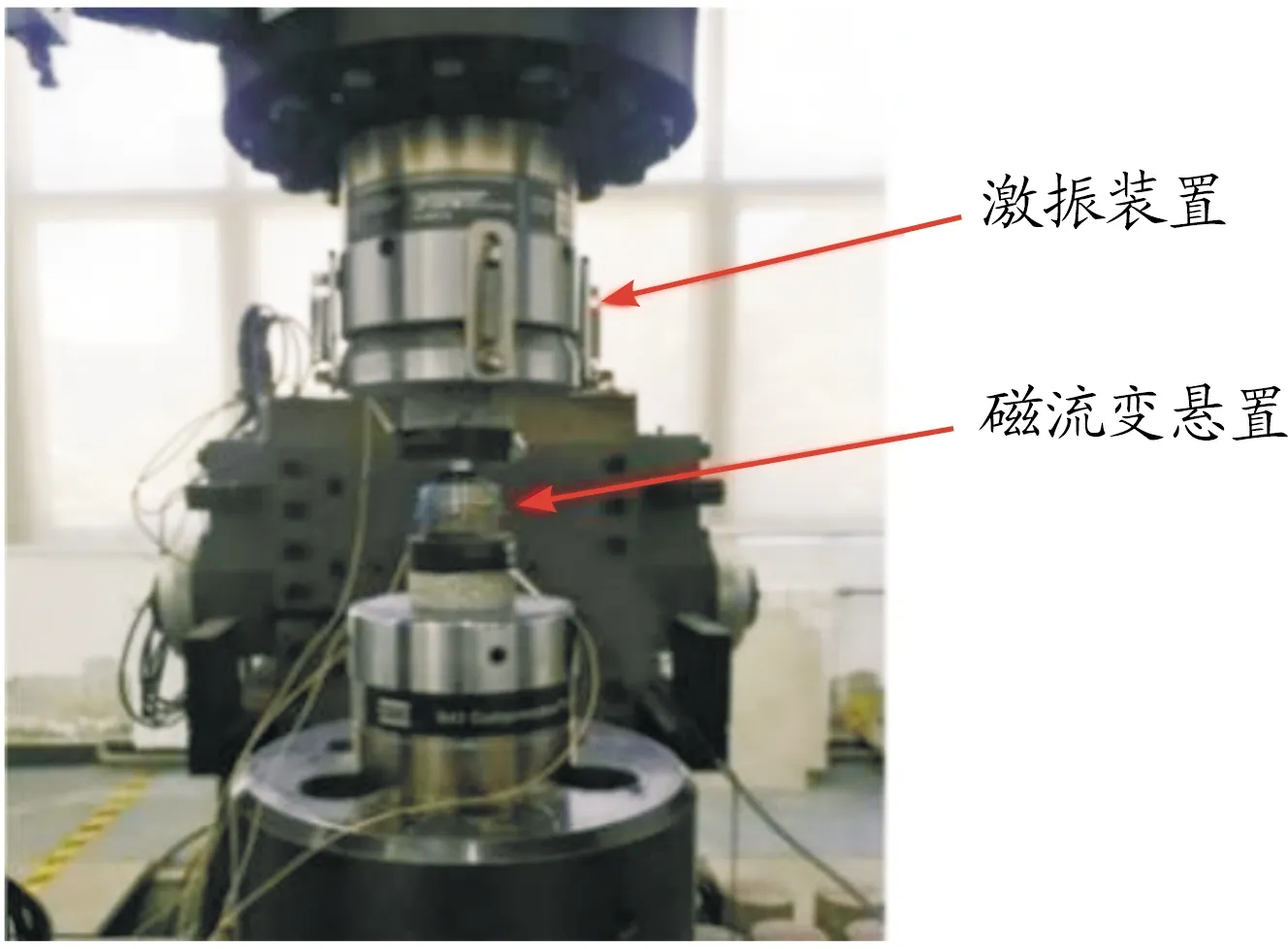
圖2 動(dòng)態(tài)特性實(shí)驗(yàn)裝置圖
1.2.1磁流變發(fā)動(dòng)機(jī)懸置正向模型
如圖3所示,磁流變懸置正向模型將上一時(shí)刻的位移xk-1、速度vk-1、電流Ik-1、阻尼力Fk-1和當(dāng)前時(shí)刻的位移xk、速度vk、電流Ik和激振頻率fk作為神經(jīng)網(wǎng)絡(luò)的輸入,當(dāng)前時(shí)刻的輸出阻尼力Fk為神經(jīng)網(wǎng)絡(luò)的輸出,D表示延遲時(shí)間。
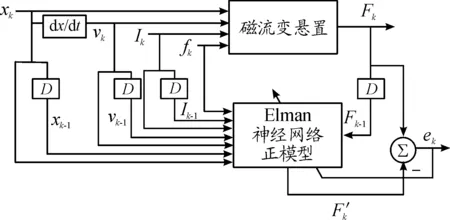
圖3 磁流變懸置正向模型示意圖
為了定量評(píng)價(jià)所建立磁流變懸置正向模型的預(yù)測(cè)精度,建立評(píng)價(jià)指標(biāo)如下:
(2)
式中:EF為正向模型預(yù)測(cè)精度;Fk為實(shí)驗(yàn)中實(shí)際測(cè)得的輸出阻尼力;Fk′為所建立磁流變懸置正向模型的輸出阻尼力;nL為測(cè)試樣本的個(gè)數(shù)。
0.5、1.5、3 A激勵(lì)電流條件下的磁流變發(fā)動(dòng)機(jī)懸置的阻尼力和位移值如圖4所示。圖中動(dòng)態(tài)特性實(shí)驗(yàn)所測(cè)得的數(shù)據(jù)用實(shí)線表示,磁流變懸置正向模型的預(yù)測(cè)結(jié)果用虛線表示。
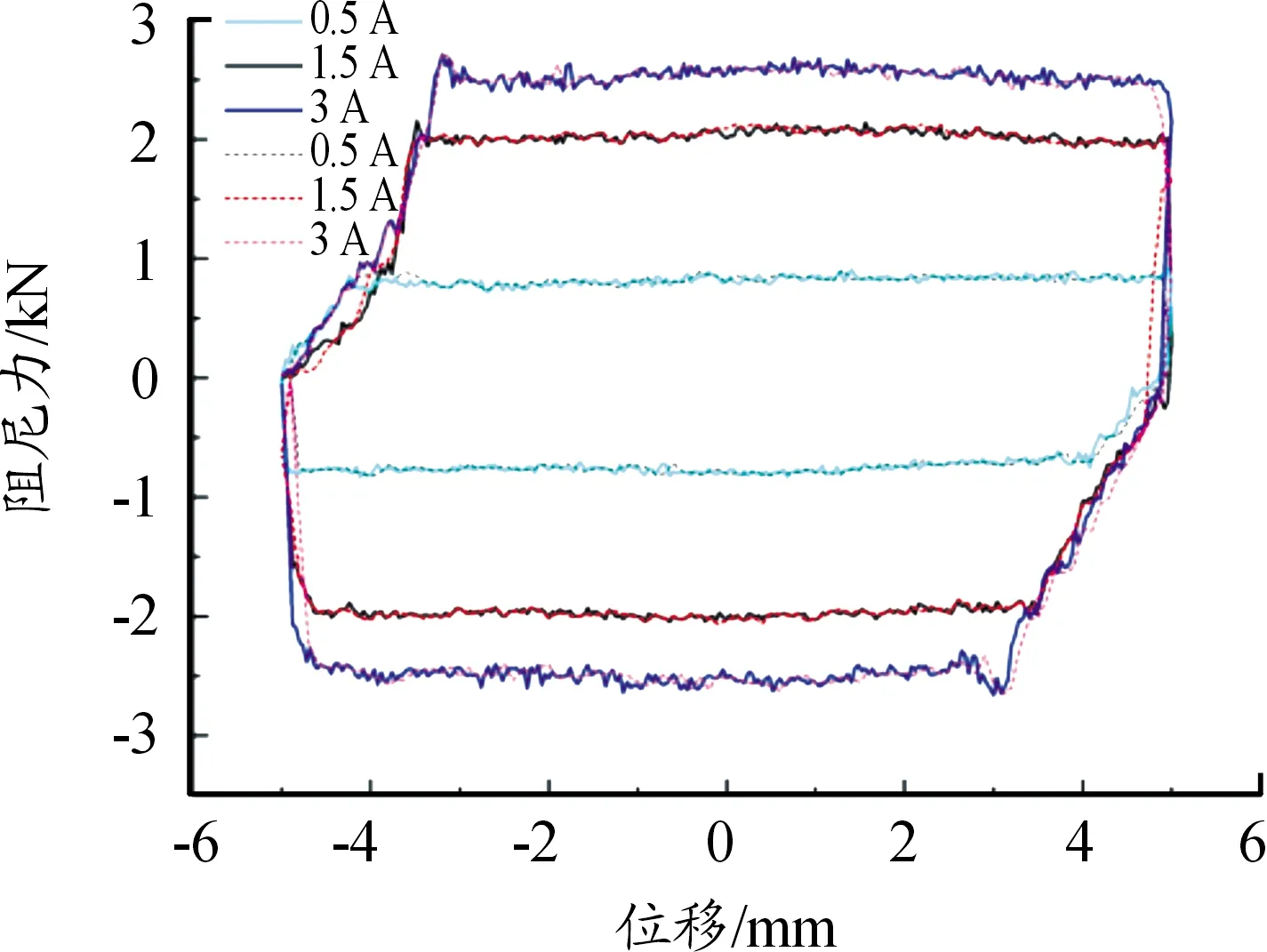
圖4 懸置正模型辨識(shí)結(jié)果曲線
不同激勵(lì)條件下磁流變懸置神經(jīng)網(wǎng)絡(luò)正模型對(duì)懸置阻尼力的預(yù)測(cè)精度如表1所示。

表1 磁流變懸置正向模型的預(yù)測(cè)精度
從圖1和表1的結(jié)果可以看出:所建立的磁流變懸置正向模型的預(yù)測(cè)結(jié)果與磁流變發(fā)動(dòng)機(jī)懸置動(dòng)態(tài)特性實(shí)驗(yàn)的數(shù)據(jù)在整體上具有相同的變化趨勢(shì),且其預(yù)測(cè)精度普遍高于95%,進(jìn)一步證明了正向模型的有效性。
1.2.2磁流變發(fā)動(dòng)機(jī)懸置逆向模型

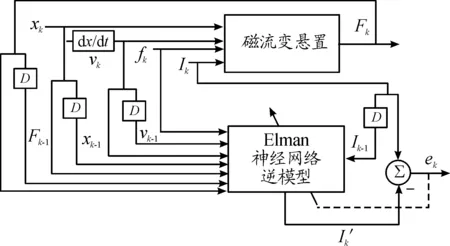
圖5 磁流變懸置逆向模型辨識(shí)過(guò)程框圖
為了定量評(píng)價(jià)所建立磁流變懸置正向模型的預(yù)測(cè)精度,同樣建立評(píng)價(jià)指標(biāo):
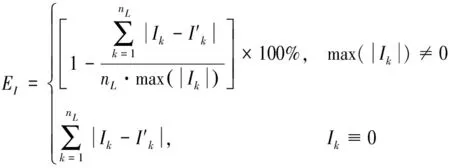
(3)
動(dòng)態(tài)特性實(shí)驗(yàn)中實(shí)際輸入電流與磁流變懸置逆向模型的預(yù)測(cè)結(jié)果如圖6所示,圖中動(dòng)態(tài)特性實(shí)驗(yàn)所測(cè)得的數(shù)據(jù)用實(shí)線表示,磁流變懸置正向模型的預(yù)測(cè)結(jié)果用虛線表示。磁流變懸置逆向模型的預(yù)測(cè)精度如表2所示。
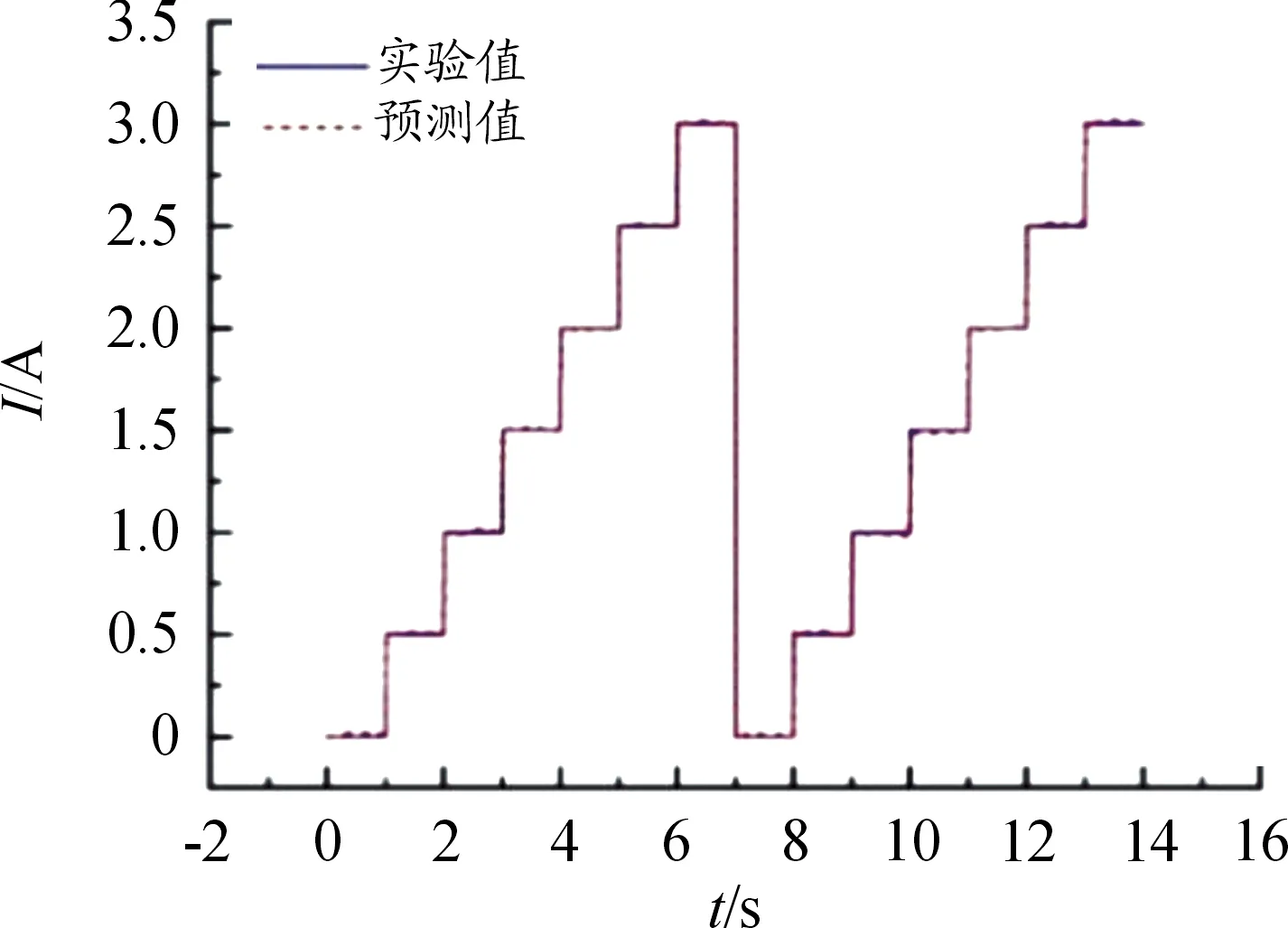
圖6 懸置逆模型辨識(shí)結(jié)果曲線

表2 磁流變懸置逆向模型的預(yù)測(cè)精度
從圖6和表2的結(jié)果可以看出:所建立磁流變懸置逆向模型辨識(shí)的電流大小與磁流變懸置動(dòng)態(tài)特性實(shí)驗(yàn)過(guò)程中所施加的電流大小基本一致,其預(yù)測(cè)精度最低為98.10%,最高為99.82%。表明該逆模型具有較高的可靠性,這為磁流變懸置的半主動(dòng)控制提供了先決條件。
2 控制策略
2.1 神經(jīng)網(wǎng)絡(luò)PID
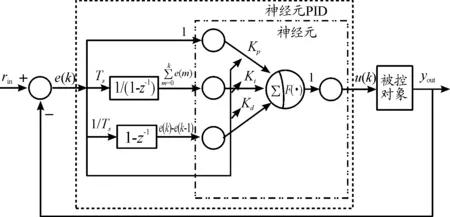
圖7 神經(jīng)網(wǎng)絡(luò)PID原理框圖
2.2 改進(jìn)果蠅優(yōu)化算法
FOA是一種基于果蠅覓食行為的全局智能優(yōu)化算法,更適合于復(fù)雜問(wèn)題的優(yōu)化。基本FOA的步驟可以表示如下[25]:
步驟1隨機(jī)初始化果蠅數(shù)量P、最大迭代次數(shù)INmax、隨機(jī)距離FR和初始位置(Xaxis,Yaxis)。
步驟2賦予果蠅個(gè)體飛行的隨機(jī)方向Randi和距離FR。
(4)
步驟3計(jì)算果蠅個(gè)體與原點(diǎn)之間的距離Disti和味道濃度判別值Si。
(5)
Si=1/Disti
(6)
步驟4將味道判別值Si代入適應(yīng)度函數(shù),求出果蠅個(gè)體的味道濃度Smelli,找出種群中濃度最優(yōu)的果蠅。
Smelli=Function(Si)
(7)
[bestSmell,bestindex]=min(Smell)
(8)
步驟5保留最優(yōu)值Smellbest,果蠅群體飛往最優(yōu)位置。
Smellbest=bestSmell
(9)
(10)
步驟6迭代尋優(yōu),重復(fù)步驟4~6,直至達(dá)到預(yù)設(shè)精度值。
從基本果蠅優(yōu)化算法可以看出,飛行距離的參數(shù)分配很大程度上依賴于Randi函數(shù),由于盲目搜索,極有可能陷入局部極值。因此采用云模型算法對(duì)果蠅優(yōu)化算法的隨機(jī)方向函數(shù)進(jìn)行自適應(yīng)調(diào)整,改進(jìn)后的果蠅優(yōu)化算法流程如圖8所示。
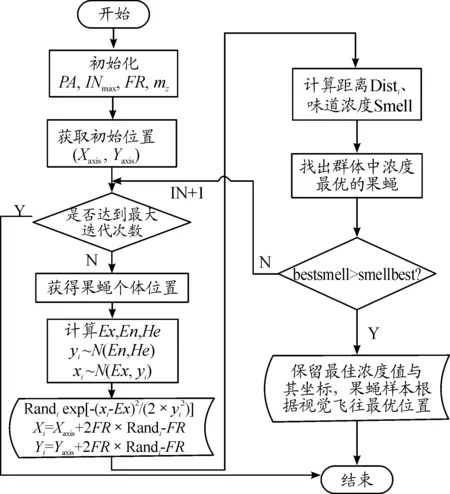
圖8 改進(jìn)果蠅算法流程框圖
當(dāng)獲得每只果蠅個(gè)體位置信息后,首先使用逆向云發(fā)生器將定量的果蠅個(gè)體信息數(shù)據(jù)轉(zhuǎn)換成定性概念的數(shù)字特征。隨后將原始果蠅種群X1,X2,…,Xn隨機(jī)分成m組,每組q只果蠅(n=m×q且n,m,q都是正整數(shù))。分別計(jì)算每組果蠅的組內(nèi)樣本方差:
(11)
(12)
最后使用正向云發(fā)生器,得到n個(gè)云滴及其確定度:
μ(x)=Randi=exp(-(Xi-Ex)2/2(Yi)2)
(13)
其中,Yi~N(En,He),Xi~N(Ex,Yi)
(14)
He2=EY2-En2
(15)
(16)
(17)
2.3 基于改進(jìn)果蠅優(yōu)化算法的PID控制方法
基于IFOA的PID控制原理如圖9所示。首先基于云模型改進(jìn)的果蠅優(yōu)化算法(IFOA)將獲得的原始果蠅種群的信息Xi、Yi發(fā)送給逆向云發(fā)生器,得到果蠅種群的Ex、En、He;再經(jīng)由正向云發(fā)生器得到Randi來(lái)迭代果蠅位置;最后將IFOA優(yōu)化的PID控制器的3個(gè)參數(shù)作用于磁流變懸置,從而實(shí)現(xiàn)對(duì)輸入電流的半主動(dòng)控制。
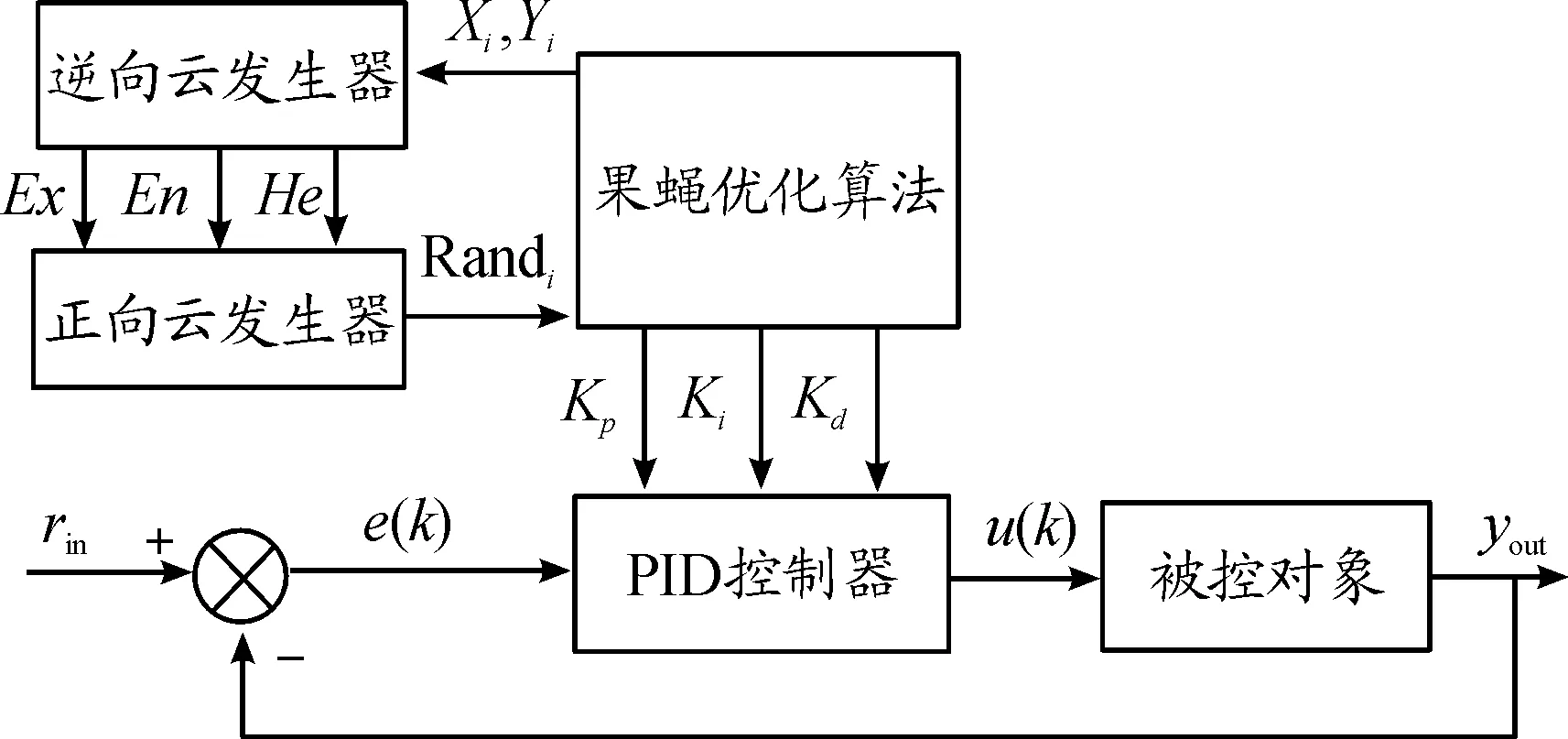
圖9 基于IFOA的PID控制原理框圖
3 磁流變發(fā)動(dòng)機(jī)懸置半主動(dòng)控制系統(tǒng)實(shí)驗(yàn)研究
3.1 電流控制實(shí)驗(yàn)
由于磁流變液的強(qiáng)非線性特性以及實(shí)際使用過(guò)程中不可預(yù)測(cè)的復(fù)雜多變的使用環(huán)境,對(duì)磁流變發(fā)動(dòng)機(jī)懸置系統(tǒng)的半主動(dòng)控制的關(guān)鍵是根據(jù)不同的工況、不同的振動(dòng)阻尼需求對(duì)磁流變懸置上的輸入電流進(jìn)行相應(yīng)的調(diào)整,進(jìn)而達(dá)到減振的目的。實(shí)驗(yàn)中通過(guò)LabVIEW向DP811A直流電源傳送信號(hào)。因此,檢驗(yàn)磁流變液懸置減振效果優(yōu)劣的先決條件是檢驗(yàn)輸出電流準(zhǔn)確性與否。利用LabVIEW軟件平臺(tái)進(jìn)行振動(dòng)分析和電流控制,如圖10所示。
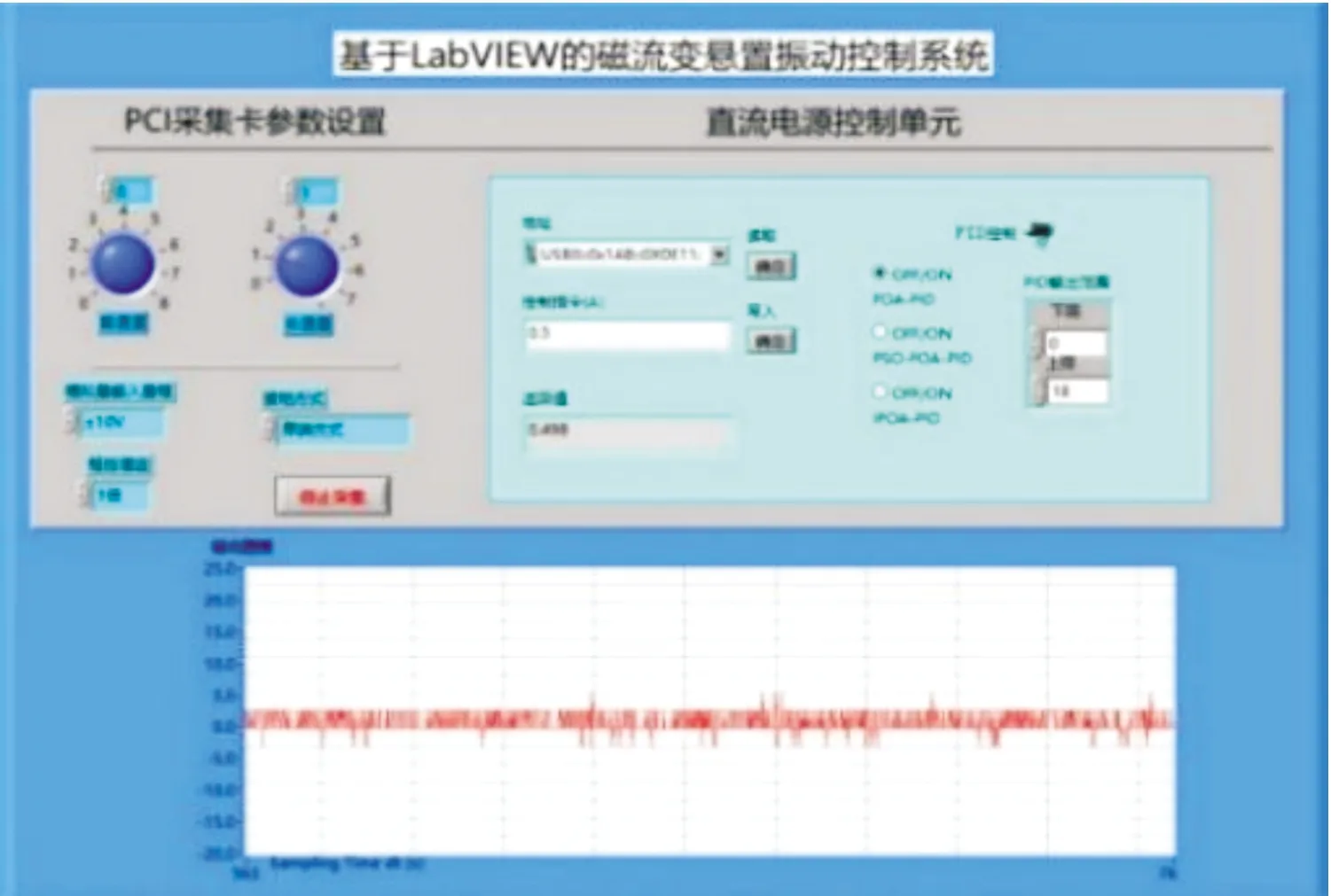
圖10 磁流變發(fā)動(dòng)機(jī)懸置控制系統(tǒng)界面
先后通過(guò)LabVIEW向可編程電流源發(fā)出0.5、2 A的輸出電流命令,實(shí)驗(yàn)結(jié)果如圖11所示。可以看到,直流電源與LabVIEW電流控制模塊的通訊完好,輸出電流總體上保持著0.5、2 A的恒定輸出。但是從局部放大圖可以看到,實(shí)際輸出電流存在一定的上下波動(dòng)。對(duì)其結(jié)果進(jìn)行分析,輸出電流的平均偏差為7.538e-0.3,相對(duì)平均偏差為1.499 8%,誤差的峰峰值為0.014 1 A,輸出電流的穩(wěn)定性為后續(xù)試驗(yàn)奠定了基礎(chǔ)。
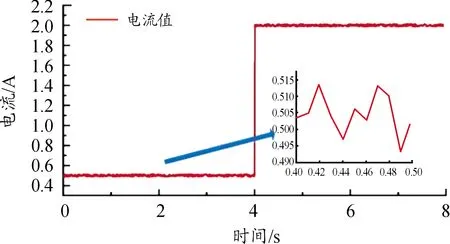
圖11 電流控制實(shí)驗(yàn)結(jié)果曲線
3.2 磁流變懸置隔振性能實(shí)驗(yàn)
為驗(yàn)證所設(shè)計(jì)的磁流變懸置和控制算法的可靠性以及測(cè)試磁流變懸置的隔振效果,搭建磁流變懸置系統(tǒng)的振動(dòng)控制實(shí)驗(yàn)臺(tái)如圖12所示。部分實(shí)驗(yàn)設(shè)備型號(hào)如表3所示。
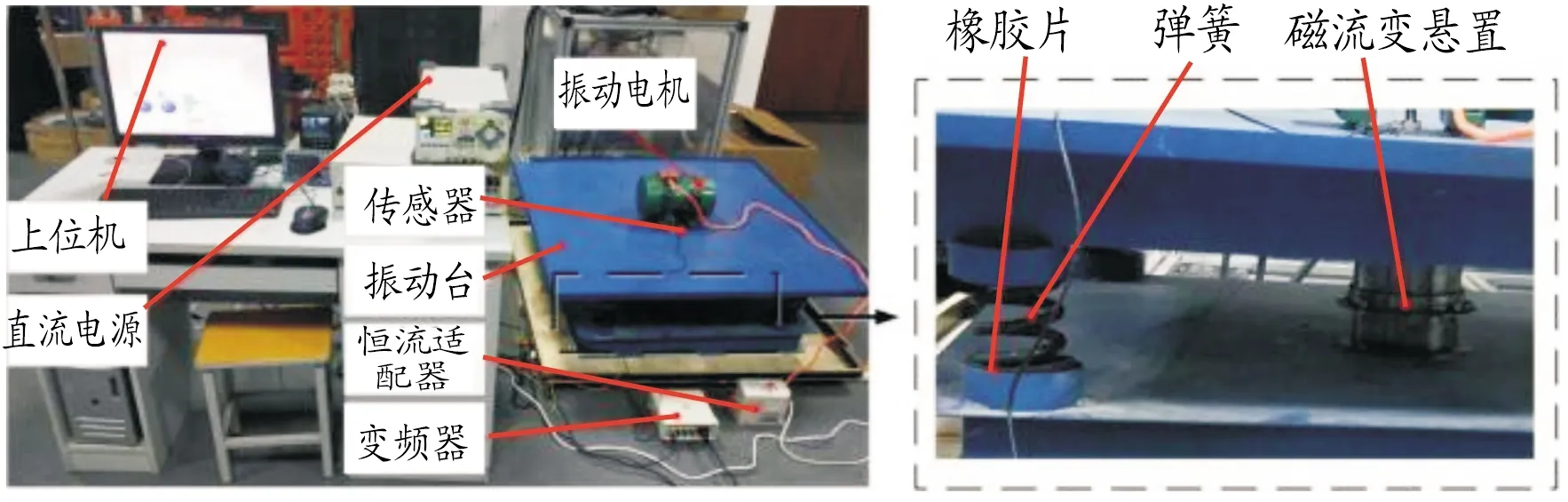
圖12 磁流變懸置控制系統(tǒng)實(shí)驗(yàn)臺(tái)實(shí)物圖
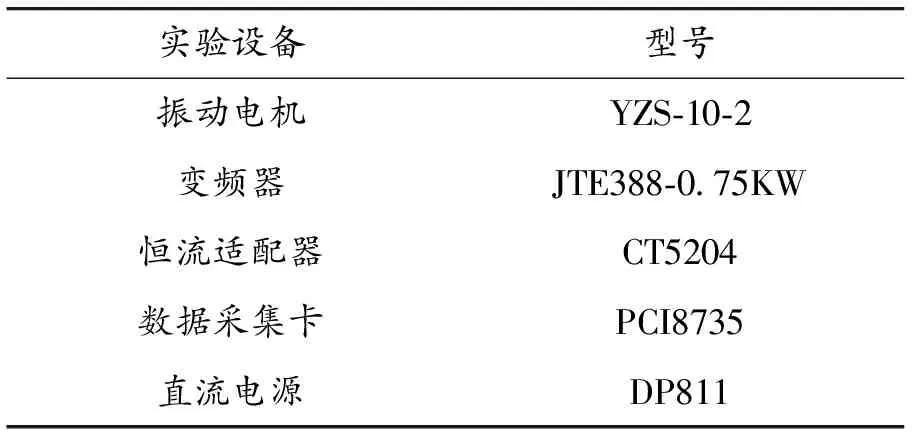
表3 實(shí)驗(yàn)設(shè)備型號(hào)
首先上位機(jī)發(fā)出電流信號(hào)通過(guò)變頻器讓振動(dòng)電機(jī)模擬汽車(chē)發(fā)動(dòng)機(jī)自身的簡(jiǎn)諧運(yùn)動(dòng),分別模擬轉(zhuǎn)速n=890 r/min和轉(zhuǎn)速n=298 0 r/min 2種工況下的工作狀態(tài)。振動(dòng)信號(hào)通過(guò)振動(dòng)臺(tái)傳遞給磁流變懸置,其振動(dòng)信號(hào)包括振動(dòng)位移和振動(dòng)加速度通過(guò)傳感器實(shí)時(shí)采集。最后分別對(duì)FOA、PSO-FOA[26]和IFOA控制的磁流變懸置系統(tǒng)進(jìn)行半主動(dòng)控制實(shí)驗(yàn),并分別對(duì)FOA、PSO-FOA和IFOA的實(shí)驗(yàn)結(jié)果進(jìn)行比較。
在不同控制算法下,發(fā)動(dòng)機(jī)懸置系統(tǒng)的性能指標(biāo)測(cè)試曲線如圖13所示。可以看出,低頻時(shí),由IFOA-PID算法控制的懸置系統(tǒng)的位移和加速度表現(xiàn)明顯優(yōu)于其他2種控制算法,其位移與加速度值最小、振幅最小;高頻時(shí),由IFOA-PID算法控制的懸置系統(tǒng)的位移與加速度控制效果也優(yōu)于其他2種控制算法。此外,如圖13(d)所示,F(xiàn)OA-PID算法控制的磁流變懸置系統(tǒng)在1.8~2.2 s時(shí)加速度出現(xiàn)了明顯的波動(dòng),PSO-FOA-PID算法在0.5~1 s時(shí)加速度值也發(fā)生了同樣的劇烈變化。反觀IFOA-PID算法控制的高頻加速度相較于自身加速度值雖有較為明顯的數(shù)值變化,但顯然受到了明顯抑制,這進(jìn)一步表明了所提算法的優(yōu)越性。
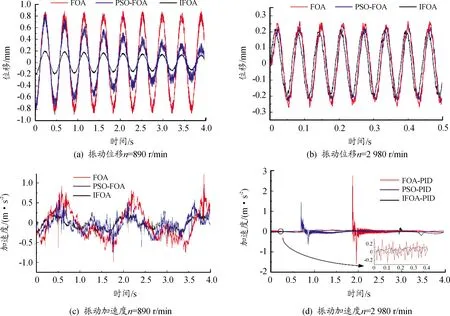
圖13 磁流變懸置振動(dòng)測(cè)試曲線
為了更進(jìn)一步地對(duì)實(shí)驗(yàn)結(jié)果進(jìn)行分析,更定量化地表示3種算法的控制效果。如表4所示,分別計(jì)算了3種算法控制的磁流變懸置系統(tǒng)振動(dòng)加速度和位移均方根值(RMS)。
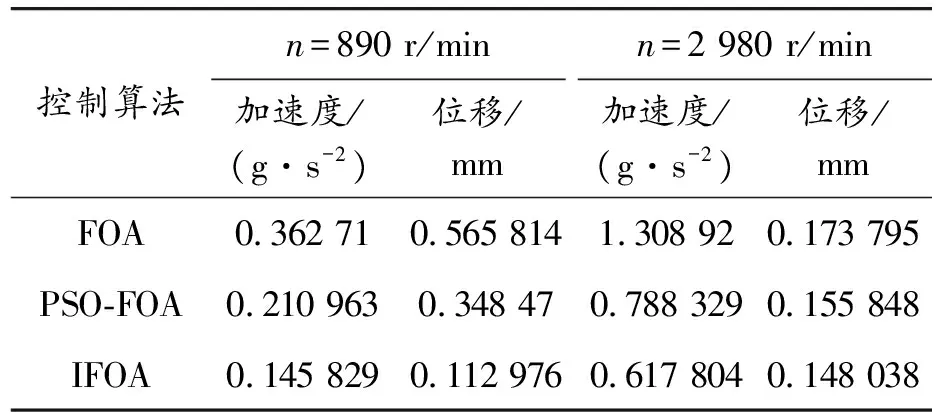
表4 不同頻率的均方根
通過(guò)計(jì)算,IFOA-PID算法控制的磁流變懸置系統(tǒng)的低頻加速度均方根值和位移均方根值分別為0.145 829 g·s-2、0.112 976 mm,其高頻加速度均方根值和位移均方根值分別是0.617 804 g·s-2、0.148 038 mm。與FOA-PID相比,其低頻加速度與位移均方根值、高頻加速度與位移均方根值分別減少了59.794 6%、80.033 0%、52.800 4%、14.820 3%;與PSO-FOA-PID相比,其低頻加速度與位移均方根值、高頻加速度與位移均方根值分別減少了30.874 6%、67.656 9%、 21.631 2%、5.011 3%。
4 結(jié)論
1) 相比傳統(tǒng)發(fā)動(dòng)機(jī)懸置,磁流變發(fā)動(dòng)機(jī)懸置表現(xiàn)了更優(yōu)越的控制效果和更好的隔振性能。
2) 基于Elman神經(jīng)網(wǎng)絡(luò)建立的磁流變懸置正向、逆向辨識(shí)模型表現(xiàn)可靠,其辨識(shí)精度可達(dá)95%以上,增大訓(xùn)練樣本種類(lèi)與數(shù)量可進(jìn)一步提高辨識(shí)模型的預(yù)測(cè)精度。
3) 文中提出的基于云模型改進(jìn)果蠅優(yōu)化算法的PID控制策略在振動(dòng)位移和振動(dòng)加速度的控制效果上表現(xiàn)出了明顯的優(yōu)勢(shì),可有效抑制發(fā)動(dòng)機(jī)懸置系統(tǒng)的振動(dòng)。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
計(jì)算物理(2014年2期)2014-03-11 17:01:44