電纜導體截面積檢測方法研究及應用
2021-09-17 08:02:56萬傳建
鐵道建筑技術 2021年8期
萬傳建
(中鐵十一局集團電務工程有限公司 湖北武漢 430071)
1 引言
電纜作為鐵路建筑工程中的必要施工材料,是電力傳輸、信號傳輸的載體。電纜質量作為工程安全運行的必要因素,隨著電纜產業的日益發展壯大,我國電纜生產能力出現過剩現象,市場競爭激烈,行業生產集中度低,生產標準很難得到嚴格控制。目前,由于電纜生產產業不少小規模企業,在市場競爭中面臨越來越激烈的生存壓力,往往會出現不同程度、不同類型的偷工減料,以次充好。建設工程對電纜自身質量要求較高,當出現不達標電纜時,往往會帶來嚴重后果。項目施工管理過程中,多依靠送第三方抽樣檢查或者進場材料驗收等完成電纜的檢測。第三方抽樣檢查僅針對高壓電纜,進場材料驗收對電纜的外觀、絕緣性能等參數進行人工檢查、測量,對電纜導體截面積缺乏有效的檢查方法[1-2]。
電纜檢測環節的導體截面積作為評估電纜質量的一個重要參數,截止目前主要采用線徑測量法、稱重法和直流電阻法。線徑法主要適用于單徑、未絞合的電纜導體[3]。稱重法通過截取數米長的電纜,通過稱重、測量導體長度計算導體截面積。該方法屬于破壞性試驗,截取的電纜長度較大并且后期無法繼續使用,且稱重過程復雜,不適用于項目施工管理的電纜導體截面積測量。直流電阻法通過測量導體的直流電阻和導體長度,計算得到導體截面積。本方法對電纜長度的要求較高,如果電纜長度和電纜導體截面積同比例變化,該方法無法有效判斷。
為了滿足項目施工管理中隨檢隨用的電纜合規性檢測需求,急需探求一種有效的截面積檢測方法,能快速無損地完成電纜導體截面積檢測。
2 機器視覺檢測技術概述
機器視覺檢測技術是目前廣泛應用于工業、農業、軍事和醫療等領域的一種間接的測量技術,通過分析和處理圖像的信息準確獲取被檢測物體的幾何參數、行為信息,可用于工件尺寸測量、損傷檢測、農作物病蟲害檢測、地形偵察、遙感測繪、器官尺寸檢測、無人駕駛等領域[4-6]。隨著計算機技術和光學成像技術的發展,機器視覺檢測技術正在向智能化、自動化方向發展,并且檢測精度、檢測效率逐步得到提高。
機器視覺檢測技術以被檢測物體的數字圖像為測量對象,經過圖像采集和圖像處理兩個關鍵過程,獲取被檢測對象的有效幾何參數和行為信息。圖像采集是將被檢測物體的投影轉化為計算機可識別數字圖像的過程,獲取被檢測物體的高分辨率、低失真圖像。圖像處理通過圖像降噪、圖像分割和像素尺寸計算等過程,有效分離目標和背景,對物體邊緣進行準確識別[7]。機器視覺檢測技術正在開展實時檢測、多光譜檢測及數字圖像處理算法等方面的研究[8]。為了進一步實現導體端面的實時測量,提高截面積測量精度,項目組決定采用機器視覺檢測技術測定電纜導體的截面積。
3 機器視覺檢測裝置研究
機器視覺檢測裝置由成像裝置、圖像處理系統組成。成像裝置包括補光系統、攝像頭、被測物夾具等結構,完成高質量圖像的采集,是導體端面截面積測量的基礎。圖像處理系統主要由圖像處理軟件和輔助設備組成,實現導體端面圖像處理,獲得電纜導體截面積(見圖1)。
3.1 成像裝置
成像裝置通過光學攝像頭、感光芯片、光源和固定夾具完成電纜導體截面的數字圖像獲取及轉換。電纜導體在光源照射下,經過光學鏡頭成像,利用感光芯片將圖像轉化為數字信號,經過圖像采集卡轉變為有效文件并儲存。
光學成像裝置由拍攝導體端面圖像的攝像頭、固定被測對象位置的定位螺栓、控制被測物到攝像頭距離的定距擋板、提供光源的補光燈和漫光板及鏡筒組成(見圖2)。
由補光燈和漫光板組成的補光系統是為了使被測目標和背景產生明顯的區別,凸顯被測目標的特征,采用發光二極管(LED)為被測物提供亮度穩定、使用壽命長、可加工度高的照明光源,提高成像質量。經試驗,電纜導體截面積測量采取12個額定電壓5 V、額定功率50 mW的矩形補光燈,光照均勻、光線柔性度高,有效避免局部圖像過于明亮,影響圖像的對比度。被測物在補光燈下,導體呈鏡面光澤,與背景產生明顯的區別。
感光芯片是成像系統的主要部件,也是工業相機的成像部件,一般有電荷耦合型器件(CCD)和金屬氧化物器件(CMOS)兩類。其中,金屬氧化物器件(CMOS)因不需要額外配置圖像采集卡等傳統硬件而被廣泛應用。CMOS采用寄生電容將每個像素轉換成電壓(模擬信號),減少了CCD傳感器中的信號轉換環節,有效節約能耗。根據圖像像素需求,圖像處理算法的分割精度普遍達到0.5像素以內,電纜導體截面積檢測以0.5像素進行預設檢測系統。
電纜導體截面積檢測裝置檢測系統采用定焦鏡頭,能有效避免因對焦誤差造成的像素模糊。焦距增加能有效抑制成像畸變,考慮到裝置成本和測量精度需求,本裝置采用焦距為16 mm的鏡頭。
成像系統中導體端面與定距擋板貼合,由于定距擋板屬于活動構件,因此其與鏡筒光軸存在一定傾角,在成像時會引入傾斜誤差。為提升成像系統的有效性,減小成像誤差,定距擋板的傾角應限制在一定范圍。
圖3中,A和B為成像系統物面(導體端面)和感光芯片的共軛面,物體的大小用L表示,H為理想物體所成像的大小,u為物距,v為像距,假設透鏡直徑為無窮小。
導體的端面與物面A可能會出現一定程度傾斜,假設傾斜角度為θ,對應的像高為H′,相當于一個高度為L′的物體在A平面上所成像,L和L′的差即為傾角存在而形成的誤差。其相對誤差計算方法為:
將誤差用成像裝置光學參數表示,則:
顯然,δ隨L增大而增大。本文所述待測目標最大直徑為15 mm,因此本文取L=15 mm進行分析,并繪制傾斜誤差δ隨傾角θ的函數圖像(見圖4)。限制傾斜誤差小于0.3%,傾角θ設計時不大于2°,即定距擋板與光軸的夾角不大于2°。
此外,鏡筒內外徑、擋板尺寸、定位螺栓型號等固定夾具的結構參數由實際經驗確定,在正常測量時不影響測量精度。
3.2 圖像處理系統
圖像處理系統主要由圖像處理算法軟件和軟件運行的硬件組成。其中,軟件設計重點針對被測目標圖像的邊緣、尺寸,進行有效提取,進而判定圖像的有效區域,利用局部區域自迭代聚類進行快速初次分割和合并,統計銅線圈的個數或面積,從而準確計算出電纜導體截面積(見圖5)。
本項目擬采用像素級圖像邊緣檢測算法和基于連通組元提取等流程,實現導體邊緣精確定位。圖像邊緣檢測通過圖像的灰度值變化準確定位邊緣,通過一次求導運算、二階倒數分別判定階躍型邊緣、斜坡形邊緣。本項目通過對比基于Laplace算子、LOG算子、神經網絡分析法、小波變換、數學形態學和分形理論的圖像邊緣檢測方法對50 mm2緊壓絞合電纜截面進行處理。邊緣檢測結果及處理時長見圖6和表1。
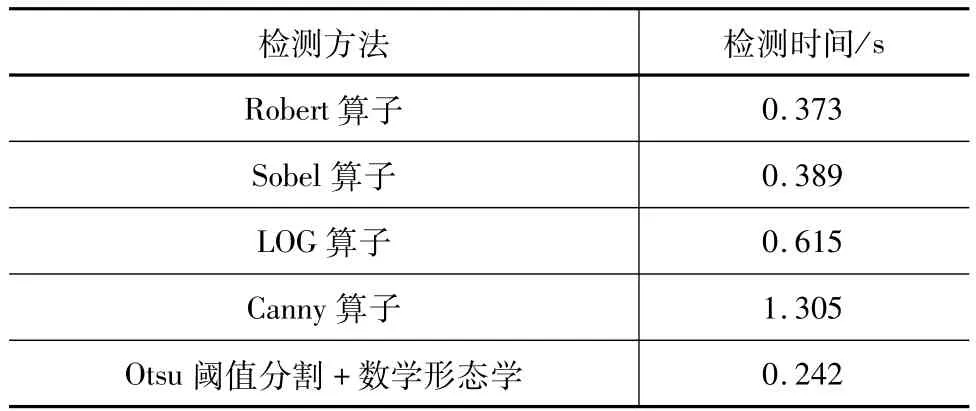
表1 各類邊緣檢測算法處理時長
經對比發現:Roberts、Sobel、Canny 算子檢測結果相似且相對準確,但存在不少偽邊緣。LOG算子和Canny算子邊緣寬度約為一個像素,但LOG算子對噪聲十分敏感,Canny算子用時較長。Otsu閾值分割與數學形態學結合的算法定位精度高,邊緣寬度約為兩個像素,對噪聲不敏感,檢測速度最快。本項目選取Otsu閾值分割與數學形態學相結合的檢測方法作為檢測系統的邊緣檢測方法。
圖像邊緣補償采用角點提取算法,提取導體相接觸形成的角點,通過角點將電纜輪廓拆解為不連續的弧段,每個弧段的兩端對應兩個角點,提取每個弧段的像素點最小凸多邊形,剔除凸多邊形中角點弧長所在的一邊,用剩余弧段代替原始弧段,依次將弧段連接,即可得到補償完成的輪廓,有效填補輪廓的缺損、修復粗糙的輪廓邊緣[9]。以50 mm2電纜導體輪廓為例展示邊緣補償流程,提取弧段AB,通過像素映射,獲取補償后的新弧段(見圖 7)。
通過以CPDA角點檢測為基礎算法,然后改進了CPDA算法的全局角度計算方法,使其更適用于電纜導體輪廓。以50 mm2電纜導體輪廓為例進行有效性驗證,經過試驗驗證,本項目提出的角點檢測算法能精確提取角點,通過有效補償消除邊緣缺損,實現導體輪廓的重構(見圖8)。
4 機器視覺檢測試驗
將圖像處理算法編寫為軟件,按照相機控制、圖像顯示、圖像處理、結果打印四個模塊進行設置。利用相機控制模塊控制導體端面圖像的采集,并顯現在裝置界面上;利用圖像處理模塊分離出電纜導體和背景,通過輪廓提取、降噪、邊緣補償、填充導體區域等完成電纜端面像素點的去噪、優化;統計導體像素點數量,結合成像裝置原理計算導體實際面積(見圖9)。
以50 mm2電纜和150 mm2電纜為檢驗對象驗證機器視覺檢測系統的有效性和準確性。
(1)截取50 mm2電纜和150 mm2電纜端面,采集電纜端面的高清圖像。
(2)采用機器視覺檢測系統對圖像進行處理,處理得到的導體像素點記為n1,折算得到的面積記為s1。
(3)測定電纜的有效截面積,記為s2。測量方法為國家標準GB/T 3048.2—2007規定的稱重法[10]。
兩種規格導體處理后得到的數據見表2和表3。
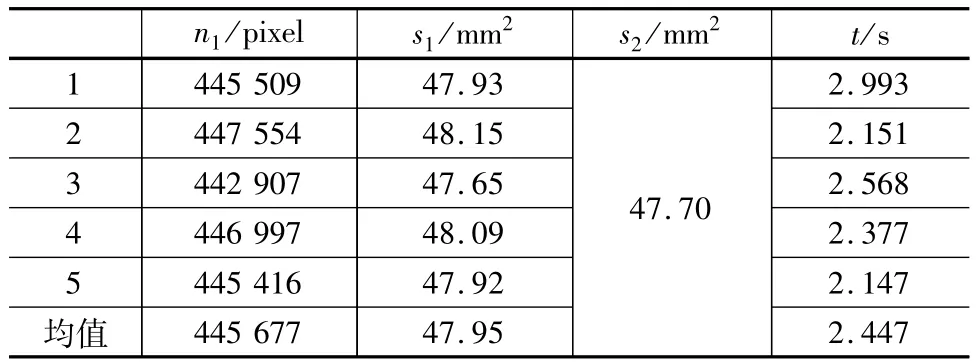
表2 50 mm2電纜測量結果
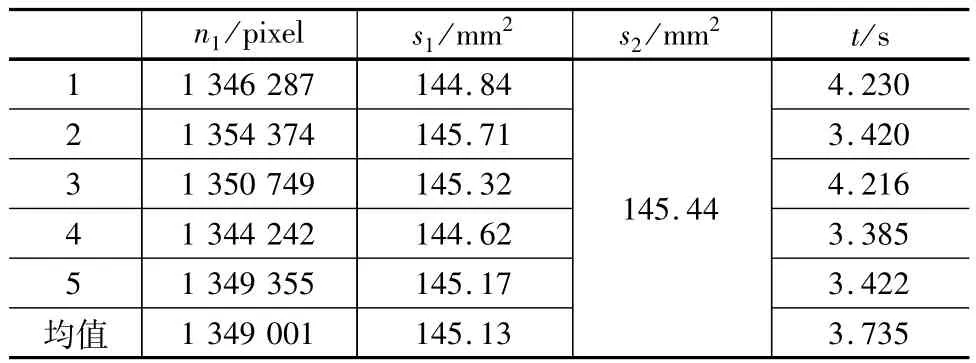
表3 150 mm2電纜測量結果
由表2和表3可知,50 mm2電纜的平均檢測時長為2.447 s,平均測量誤差為+0.52%,最大測量誤差為+0.94%;150 mm2電纜的平均檢測時長為3.735 s,平均測量誤差為-0.22%,最大測量誤差為-0.56%。經試驗可知,機器視覺檢測技術在電纜導體截面積測量方面能達到較高精度,測量誤差小于1%。
5 結束語
電纜導體截面積是電纜質量檢測的一個重要參數,本項目通過研究機器視覺檢測技術,準確測量出電纜導體截面積。經過試驗和現場應用,基于機器視覺檢測技術的電纜導體截面積測量方法在測量電纜導體截面積的最大相對誤差在1%以內,檢測時間在5 s以內,可有效滿足項目施工管理中對電纜導體的截面積測量要求,并具有較強的現場可操作性和可推廣應用性。同時,可為電阻測量法、電容測量法判定電纜的合規性提供精準的截面積參數[11]。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
