脈沖式事件觸發(fā)控制的時(shí)變多個(gè)體系統(tǒng)一致性
2021-09-18 06:22:42過榴曉沈莞薔
計(jì)算機(jī)應(yīng)用 2021年9期
柴 潔,過榴曉,沈莞薔,陳 晶
(江南大學(xué)理學(xué)院,江蘇無錫 214122)
(*通信作者電子郵箱guoliuxiao@jiangnan.edu.cn)
0 引言
多個(gè)體系統(tǒng)作為一個(gè)非常活躍的研究領(lǐng)域,可以廣泛應(yīng)用于眾多領(lǐng)域,如一致性、編隊(duì)控制和同步[1-3]等,一致性問題作為多個(gè)體系統(tǒng)控制的基本問題之一,儼然受到眾多學(xué)者的關(guān)注[4-6]。
考慮到多個(gè)體系統(tǒng)在復(fù)雜場(chǎng)景下機(jī)動(dòng)目標(biāo)跟蹤或防碰撞的實(shí)際任務(wù),滿足任務(wù)要求和適應(yīng)環(huán)境變化的編隊(duì)需要是時(shí)變的。多個(gè)體系統(tǒng)的時(shí)變特性主要體現(xiàn)在時(shí)變動(dòng)力學(xué)節(jié)點(diǎn)和時(shí)變的拓?fù)溥B接兩個(gè)方面。相較于定常系統(tǒng),時(shí)變系統(tǒng)的研究更具挑戰(zhàn)性和難度。過去的幾年里,研究人員在時(shí)變系統(tǒng)協(xié)同控制的穩(wěn)定性方面做了大量的工作[7-9]。例如,文獻(xiàn)[7]中采用矩陣無窮乘積方法研究具有切換系統(tǒng)的時(shí)變連續(xù)線性多智能體同步問題。文獻(xiàn)[8]中為解決線性時(shí)變系統(tǒng)有限時(shí)間穩(wěn)定性問題,提出一種求解有限時(shí)間穩(wěn)定性問題的數(shù)值方法。文獻(xiàn)[9]中研究了線性時(shí)變系統(tǒng)的漸進(jìn)穩(wěn)定性、指數(shù)穩(wěn)定性和一致指數(shù)穩(wěn)定性的問題。文獻(xiàn)[10]中分析了非線性時(shí)變時(shí)滯系統(tǒng)的穩(wěn)定性,同時(shí)將分析結(jié)果應(yīng)用于具有時(shí)變系數(shù)的時(shí)變時(shí)滯線性系統(tǒng)的穩(wěn)定性問題中。文獻(xiàn)[11-12]中則假設(shè)鄰接矩陣中每個(gè)元素在一個(gè)周期內(nèi)的平均值大于一個(gè)預(yù)定義的正常數(shù)的條件,實(shí)現(xiàn)時(shí)變的多個(gè)體系統(tǒng)的一致性。顯然,這個(gè)條件某種程度上非常保守。當(dāng)考慮更復(fù)雜的動(dòng)力學(xué)行為時(shí),需要更多的約束條件來確保系統(tǒng)同步。本文研究時(shí)變多個(gè)體系統(tǒng),包括時(shí)變節(jié)點(diǎn)的動(dòng)態(tài)特性和系統(tǒng)拓?fù)浣Y(jié)構(gòu)的一致性。
為減少多個(gè)體系統(tǒng)信息傳輸?shù)某杀尽⒔档蛡€(gè)體系統(tǒng)的通信負(fù)載,研究人員提出了很多新的控制方法。文獻(xiàn)[13]中設(shè)計(jì)了事件觸發(fā)策略和自觸發(fā)策略的兩種算法來實(shí)現(xiàn)時(shí)變拓?fù)湎碌亩鄠€(gè)體系統(tǒng)的一致性;文獻(xiàn)[14]中則采用基于事件觸發(fā)控制方法,解決了固定和切換拓?fù)涞念I(lǐng)導(dǎo)跟隨多個(gè)體一致性問題;文獻(xiàn)[15]中針對(duì)資源受限的時(shí)變拓?fù)浣Y(jié)構(gòu)的多個(gè)體系統(tǒng)的編隊(duì)控制問題,設(shè)計(jì)多個(gè)體系統(tǒng)的編隊(duì)控制協(xié)議和分布式事件觸發(fā)機(jī)制,討論了系統(tǒng)的穩(wěn)定性問題;文獻(xiàn)[16]中針對(duì)具有時(shí)變通信延遲的多個(gè)體系統(tǒng),給出事件觸發(fā)條件并設(shè)計(jì)一致協(xié)議,解決系統(tǒng)的一致性問題。另一方面,脈沖控制作為一種離散的控制方法,具有降低通信和計(jì)算成本、操作簡(jiǎn)單等優(yōu)點(diǎn)。文獻(xiàn)[17]中提出了一個(gè)新的脈沖時(shí)滯不等式,給出了具有無界時(shí)變時(shí)滯的脈沖系統(tǒng)和時(shí)不變系統(tǒng)穩(wěn)定的一些充分條件;文獻(xiàn)[18-19]中結(jié)合事件觸發(fā)的算法和脈沖控制研究了系統(tǒng)的一致性。進(jìn)一步地,文獻(xiàn)[20]中利用分布式事件觸發(fā)脈沖控制方法研究了多個(gè)體系統(tǒng)的領(lǐng)導(dǎo)跟隨一致性問題,對(duì)比仿真得到,事件觸發(fā)脈沖控制比現(xiàn)有的許多基于事件的控制方法更加有效和簡(jiǎn)單;文獻(xiàn)[21]中基于事件觸發(fā)脈沖控制協(xié)議將多個(gè)體系統(tǒng)一致性結(jié)果推廣到系統(tǒng)網(wǎng)絡(luò)二分群一致性,而本文側(cè)重將線性系統(tǒng)拓展到時(shí)變線性系統(tǒng)和時(shí)變拓?fù)溥B接情形,基于脈沖式事件觸發(fā)控制協(xié)議討論多個(gè)體傳統(tǒng)一致性問題。
綜上,針對(duì)時(shí)變拓?fù)溥B接環(huán)境下的時(shí)變多個(gè)體系統(tǒng)的一致性問題,本文提出了基于事件觸發(fā)的脈沖控制協(xié)議。本文主要工作如下:1)使用脈沖控制和基于事件觸發(fā)控制方法,集兩者優(yōu)點(diǎn),設(shè)計(jì)了基于事件觸發(fā)的脈沖控制協(xié)議,解決時(shí)變線性多個(gè)體系統(tǒng)的一致性問題,有效節(jié)約了系統(tǒng)信號(hào)傳輸和協(xié)議控制成本,控制方法也更加簡(jiǎn)單可操作;2)理論推導(dǎo)了時(shí)變拓?fù)湎碌臅r(shí)變多個(gè)體系統(tǒng)一致的控制參數(shù)充分條件,且證明事件觸發(fā)脈沖時(shí)刻不存在芝諾現(xiàn)象。
1 預(yù)備知識(shí)及問題描述
1.1 代數(shù)圖論
設(shè)含有N個(gè)節(jié)點(diǎn)的有向圖G=(V,E,A),頂點(diǎn)集表示為V={v1,v2,…,vN},邊集表示為E?V×V。點(diǎn)i的鄰居集Ni={vj∈V|(vj,vi)∈E}。定義一個(gè)帶有權(quán)重的鄰接矩陣A=[aij]N×N,圖G中存在一條有向邊eij=(vi,vj)∈E,那么aij>0;否則,aij=0,定義aii=0。L=[lij]N×N為圖G的拉普拉斯矩陣,且lij=-aij,j≠i;lij=,j=i。當(dāng)系統(tǒng)拓?fù)涫菚r(shí)變的,分別用G(t)和L(t)表示其時(shí)變的連接拓?fù)浜屠绽咕仃嚒1疚挠嘘P(guān)符號(hào)表示如下:Rn表示n階實(shí)向量,Rn×n表示n×n階實(shí)數(shù)矩陣。對(duì)于向量x∈Rn、xT和‖x‖分別為其轉(zhuǎn)置和常用的歐幾里得范數(shù)。In是維數(shù)為n的單位矩陣,1N(0N)表示所有元素為1 或0 的N維列向量。Ν 為自然數(shù)集。符號(hào)diag{x1,x2,…,xn}表示對(duì)角元素為xi的對(duì)角矩陣。符號(hào)A?B表示矩陣A和B的Kronecker 積。λmax(P)和λmin(P)分別表示對(duì)稱矩陣P的最大和最小特征值。
1.2 模型描述
考慮一個(gè)含有N個(gè)個(gè)體的線性時(shí)變多個(gè)體系統(tǒng),每個(gè)個(gè)體的時(shí)變動(dòng)態(tài)方程表示為:

其中:A(t) ∈Rn×n,B(t) ∈Rn×n表示連續(xù)的矩陣函數(shù);xi∈Rn是個(gè)體i的位置向量;ui(t)為第i個(gè)個(gè)體的控制輸入。基于事件觸發(fā)脈沖控制協(xié)議設(shè)計(jì)如下:
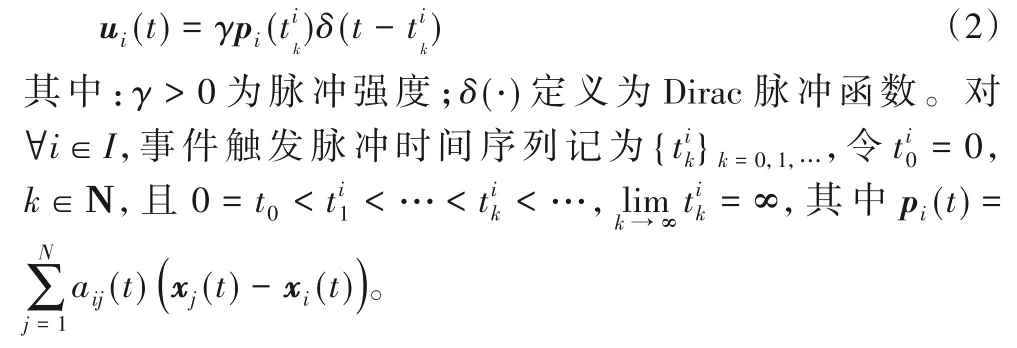
系統(tǒng)(1)結(jié)合事件觸發(fā)脈沖控制協(xié)議(2)也可表示為:
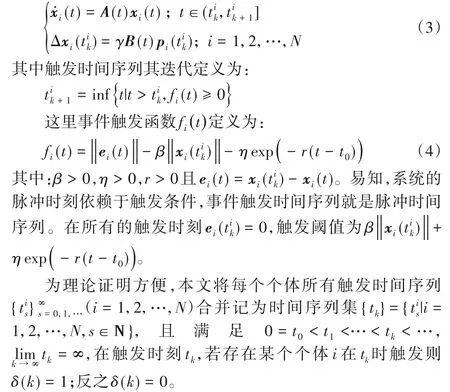
假設(shè)1 本文中所有的時(shí)變矩陣范數(shù)有界,即對(duì)任意時(shí)間t,存在正常數(shù)a、b,使得下式成立:

假設(shè)2 矩陣A、B是可穩(wěn)的,有正數(shù)c,存在一個(gè)解P>0使得下列里卡提不等式[22]成立:

下面給出證明需要的幾個(gè)重要引理。
引理1圖G包含有向生成樹,當(dāng)且僅當(dāng)G的拉普拉斯矩陣有唯一的零特征值,其他所有特征值都有正實(shí)部[23]。
引理2如果圖G是強(qiáng)連通的,則G的拉普拉斯矩陣L不可約,且L1N=0 成立,存在一個(gè)對(duì)應(yīng)于零特征值的左特征向量ξ=(ξ1,ξ2,…,ξn)T,使得ξTL=0且=1[24]。
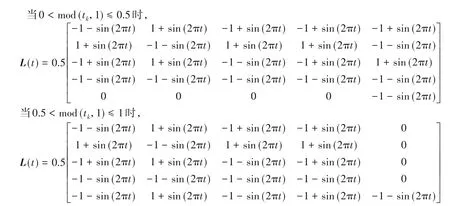
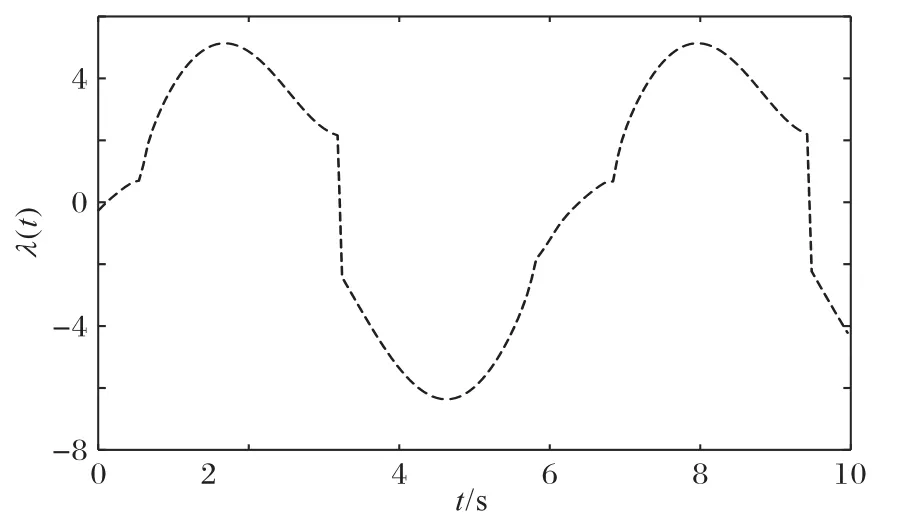
引理3令w(t)在[t0,∞)是非負(fù)的連續(xù)函數(shù),w(t) 引理4函數(shù)g(t)在[t0,∞)上是一個(gè)一致指數(shù)穩(wěn)定函數(shù),若給定正常數(shù)d1、d2,存在時(shí)間序列和常數(shù)T>0,對(duì)?t≥t0使得式(5)~(6)成立[9]。 定 義1 對(duì)于任意初始條件xi(0) ∈Rn,i∈I={1,2,…,N},若各個(gè)體的狀態(tài)滿足條件:則多個(gè)體系統(tǒng)(1)實(shí)現(xiàn)一致性。 定義2設(shè)時(shí)變連接拓?fù)鋱DG(tk),與其對(duì)應(yīng)的拉普拉斯矩陣L(tk),若滿足以下條件[26]: 序列{tk}按時(shí)間順序排列,通常來說,不是所有的個(gè)體在tk時(shí)都有脈沖輸入,在tk時(shí)刻,至多有不超過N個(gè)個(gè)體被觸發(fā)。即有i(1 ≤i≤N)個(gè)個(gè)體在tk刻觸發(fā),則可設(shè)觸發(fā)矩陣σ(k)=,也 就 是qN=[q,q,…,q]T,(q=0,1),‖σ(k)‖1=i。 基于事件觸發(fā)控制的脈沖策略,多個(gè)體系統(tǒng)網(wǎng)絡(luò)(3)的矩陣形式為:下一次事件觸發(fā)將不會(huì)觸發(fā),直到觸發(fā)函數(shù)式(4)變?yōu)?,其中e(tk)=0,結(jié)合式(12)可得: 定理2時(shí)變多個(gè)體系統(tǒng)(1),設(shè)圖G(tk)平均一致連通,基于事件觸發(fā)脈沖控制器(2)的觸發(fā)時(shí)刻由式(4)決定,若存在連續(xù)且有界的函數(shù)λ(t),λ(t)是一致指數(shù)穩(wěn)定函數(shù),一個(gè)可微矩陣函數(shù)P:[0,∞) →Sn+,P(t)=IN-1?p(t),存在常數(shù)p1和p2,0 其中:k=1,2,…。則系統(tǒng)(1)實(shí)現(xiàn)漸進(jìn)一致性。 證明 為證明系統(tǒng)穩(wěn)定,對(duì)任意t∈(tk,tk+1],構(gòu)造李雅普諾夫函數(shù)得: 其中:μ(Tj(t0,t))為Tj(t0,t)的勒貝格測(cè)度集。φ1(t)有界結(jié)論當(dāng)t→∞時(shí),?1(t) →0,定理1即得證。證畢。 在式(7)中,考慮非時(shí)變系統(tǒng)情形,即A(t)=A,L(t)=L,B(t)為單位矩陣I。式(7)中模型改寫為不是時(shí)變的事件觸發(fā)脈沖控制多個(gè)體系統(tǒng)模型: 可以直接得出下述類似文獻(xiàn)[20]中的推論。 推論1 考慮多個(gè)體系統(tǒng)(22)的連接拓?fù)鋱D連通,在事件觸發(fā)的脈沖控制協(xié)議下,若存在正定矩陣P,常數(shù)α>0,k∈Ν+滿足: 其中:φ(t0,t)是R+上的連續(xù)函數(shù)。則當(dāng)=-∞成立,系統(tǒng)(22)實(shí)現(xiàn)全局漸近收斂。存在常數(shù)c>0,t≥t0,使φ(t0,t) ≤-c(t-t0),則系統(tǒng)(22)實(shí)現(xiàn)指數(shù)收斂。其中脈沖強(qiáng)度的范圍滿足: 根據(jù)上述的討論,事件觸發(fā)函數(shù)式(4)替換成: 上述觸發(fā)函數(shù)的優(yōu)點(diǎn)是避免了智能體之間的持續(xù)通信。在該觸發(fā)條件下,下一觸發(fā)時(shí)刻tk+1可以通過該智能體在tk上的鄰點(diǎn)信息預(yù)測(cè)。 定理3非時(shí)變的多個(gè)體系統(tǒng)(22),假設(shè)連接矩陣拓?fù)鋱D連通,基于事件觸發(fā)的脈沖控制器(2)的脈沖觸發(fā)時(shí)刻由式(25)決定,則系統(tǒng)(22)可實(shí)現(xiàn)指數(shù)一致性收斂,且不存在芝諾行為。 推論2 連續(xù)兩個(gè)觸發(fā)事件之間的時(shí)間間隔會(huì)隨著觸發(fā)函數(shù)(25)中的參數(shù)β、η增加而增加。 證明 由觸發(fā)函數(shù)(25),若誤差ei(t)超過閾值上界,可得 假設(shè)不成立。即得參數(shù)β、η增加,連續(xù)兩個(gè)事件之間的時(shí)間間隔也將增大。證畢。 例1 考慮多輪式移動(dòng)機(jī)器人的位置跟蹤問題[27],每個(gè)個(gè)體的線性時(shí)變模型表達(dá)式如下: 其中:i=1,2,…,5。控制輸入按式(2)定義計(jì)算,初始狀態(tài)在[-60,60]×[-60,60]×[-60,60]×[-60,60]×[-60,60]?R5中隨機(jī)選取,令脈沖強(qiáng)度γ=0.7,β=0.01、r=η=0.01,控制參數(shù)驗(yàn)證滿足定理3 條件,A=,其中:a、b、e和d為時(shí)變標(biāo)量;個(gè)體的三個(gè)狀態(tài)分量分別表示位置、速度和執(zhí)行器的狀態(tài);a表示驅(qū)動(dòng)器的速度;b和e表示增益。如果d>0,執(zhí)行器受速度影響,系統(tǒng)內(nèi)部形成反饋回路。參數(shù){a,b,d,e}為{0.8× sin(t),1+0.1× cos(t),0,0.8× cos(t)} 。 其中K=1。則圖G(tk)平均一致連通的,可得 函數(shù)λ(t)的演化如圖1所示,其中λ(t)不總是負(fù)值。 圖1 λ(t)的演化圖Fig.1 Evolution of λ(t) 驗(yàn)證滿足定理2條件,式(26)中狀態(tài)分量軌跡圖如圖2所示,圖3 反映了系統(tǒng)的整體一致誤差e(t)=很快趨于0,基于事件觸發(fā)脈沖控制協(xié)議最終實(shí)現(xiàn)狀態(tài)一致。 圖2 式(26)中時(shí)變拓?fù)湎碌亩噍喪揭苿?dòng)機(jī)器人的狀態(tài)xi(t)(i=1,2,3)軌跡Fig.2 Trajectories of state xi(t)(i=1,2,3)of multi-wheeled mobile robots under time-varying topology in formula(26) 圖3 式(26)中個(gè)體的誤差演化Fig.3 Error evolution of agent in formula(26) 圖4 展示了系統(tǒng)的脈沖事件觸發(fā)事件序列,隨著時(shí)間變化,始終有觸發(fā)時(shí)間間隔且沒有芝諾行為。 圖4 系統(tǒng)在10 s內(nèi)的觸發(fā)時(shí)間序列Fig.4 System triggered time sequence in 10 s 數(shù)值實(shí)驗(yàn)結(jié)果表明,離散形式的分布式事件觸發(fā)脈沖控制,對(duì)于時(shí)變多個(gè)體系統(tǒng),同樣可以有效降低系統(tǒng)的通信成本。從符合定理?xiàng)l件仿真實(shí)例誤差圖可見,可以很快達(dá)到一致狀態(tài)。 本文研究了具有時(shí)變特性和基于事件觸發(fā)脈沖控制的多個(gè)體系統(tǒng)的一致性問題,系統(tǒng)的每個(gè)節(jié)點(diǎn)是動(dòng)態(tài)線性時(shí)變的,系統(tǒng)拓?fù)浣Y(jié)構(gòu)也是時(shí)變的。使用離散形式的控制協(xié)議,可充分降低系統(tǒng)的通信成本。在系統(tǒng)拓?fù)淦骄恢逻B通的假設(shè)下,理論證明了時(shí)變多個(gè)體系統(tǒng)一致性轉(zhuǎn)化為多個(gè)線性時(shí)變事件觸發(fā)脈沖控制系統(tǒng)的同時(shí)穩(wěn)定性問題,給出了事件觸發(fā)脈沖控制協(xié)議下具有時(shí)變特性的多個(gè)體系統(tǒng)一致性存在的充分條件,且不存在芝諾行為,數(shù)值仿真驗(yàn)證所給理論結(jié)果的有效性。下一步將研究基于間歇控制的時(shí)變多個(gè)體系統(tǒng)的領(lǐng)導(dǎo)跟隨一致性等問題。


2 一致性協(xié)議分析








3 數(shù)值仿真





4 結(jié)語(yǔ)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學(xué)問題(2021年4期)2021-11-05 07:02:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45