掘進機液壓控制系統的分析研究
2021-09-21 11:59:14呂保戰
機械管理開發 2021年8期
關鍵詞:方向
呂保戰
(山西省霍州煤電集團有限公司,山西 霍州 031400)
引言
隨著工業的快速發展以及不斷擴展的工業規模,作為一次能源的煤炭在我國經濟發展中占有重要的地位。對于將產煤作為主要經濟發展的一些國家,為應對快速經濟發展對能源提出的需求,提高掘進機的高機械化與自動化才能夠相應地提升各項開采工作的速度與強度。各大科研團隊也在積極開展研究新型高效的巷道掘進機以及與其相關的一系列配套設備,如掘落機、支護、裝載機、降塵設備、運輸設備等,這無疑加速了現代化懸臂式掘進機的發展。早在20 世紀40 年代末期,懸臂式掘進機就已被應用于煤炭開采過程中,且作為掘進機械之一的懸臂式掘進機在整個施工過程中扮演著重要的角色。[1]目前,應現代化的掘進要求,不但要求掘進機具有高工作效率而且需要低采掘成本。與國外掘進機的自動化控制相比,我國在用掘進機還有待提高,需針對其控制系統進行分析與改進研究,通過提高掘進機的自動化、機械化以提高工作效率,同時,通過優化工作環境以提升安全性。
1 AM-50型掘進機簡介
針對我國煤礦開采的特點,早在20 世紀70 年代,我國就已引進并使用AM-50型號掘進機。該型號掘進機具有較大的切割斷面,可針對一些較硬的煤巖完成切割。它的外形尺寸較小,長寬高為7 500 mm×2 105 mm×1 645 mm,具有適當的機重,約26 t。該掘進機的組成部分總體主要包括切割機構(切割頭、切割懸臂、回轉臺)、裝載機構、中間刮板運輸機、橋式膠帶轉載機、行走機構、液壓系統及電氣系統。該掘進機安全性高,對一些異常工作情況,包括低水溫、短路、過載等可實施監測以及保護[2]。
該型號的掘進機優點眾多:在上下坡的掘進過程中為防止其自溜下滑,采用具有自鎖作用的單頭窩桿傳動方式;掘進機中連接組件所用到的螺母、螺釘以及緊固螺栓的材質均為乳狀料膠,可靠性較高;其切割方式為軸向,主要依靠回轉臺中的齒輪-齒條機構實現切割;其結構設計合理,所涉及到的元件與部件均符合高質量、嚴格制造的選用要求。
該型號的掘進機也有一些缺點:在機器的兩側分別設有配電箱和操作臺,因此需要在機器的兩側留有操作空間,這在一定程度上縮小了設備應有的斷面范圍;切割機構及裝載機構較為固定,前者無法自由伸縮,后者則不能左右擺動,導致操作難度加大,工作效率降低;內部缺乏噴霧設備,且使用外噴霧降塵時,噴嘴數量少,效果差。
2 原有液壓控制系統的分析
該液壓系統使用的壓力油主要基于一臺交流電機,通過在油箱內的軸向柱塞變量泵經聯軸器予以提供。該電機額定轉速為1450 r/min、功率為11 kW。當切割煤巖的軟硬程度不同時,則需要有不同的切割速度,而切割頭所需的不同速度,主要依靠泵體的輸出流量得以調控。主要的調控過程為,通過操作油箱上的回轉立軸調整所需輸出流量對應的泵體位置。如果調整泵體在位置1,使其切割頭切割硬巖,則輸出的流量為34 L/min,相應供給切割頭速度73.6 r/min;如果調整泵體在位置2,使其切割頭切割軟巖,則輸出的流量為40 L/min,相應供給切割頭速度88.5 r/min。在整個施工工程中,固定好泵體的位置,將其作為定量泵,使輸出流量保持不變。
垂直擺動和左右擺動油缸的控制系統,由兩個手動的換向閥來控制切割壁的擺動,其擺動方向主要是通過工人操作手柄進行控制,操作方向與實際擺動方向一致。垂直擺動油缸的控制回路主要包括2個油缸、3 個液控單向閥以及1 個單向節流閥。液控單向閥的主要作用是使油缸達到自鎖且工作更加穩定;單向節流閥的主要作用是提升掘進安全性,防止由于切割臂崩裂造成下降事故的發生,其背壓可被調定為12~13 MPa。左右擺動油缸的控制回路則包括2 個齒條油缸、2 個液控單向閥以及2 個溢流閥。2 個液控單向閥的作用與上述垂直擺動油缸中的作用一致,用于提高設備的工作穩定性;2 個溢流閥實則為安全閥,主要針對回轉臺中的齒條油缸以及齒條-齒輪副中的壓縮張緊彈力圈進行安全控制。該型號掘進機的傳統控制回路如圖1 所示。
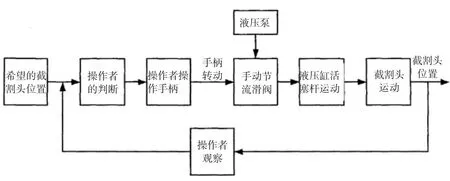
圖1 AM-50型號掘進機的傳統控制回路
3 新改液壓控制系統的分析
懸臂式掘進機在工作過程中主要依靠切割電機使切割頭進行旋轉,并通過液壓控制系統來擺動懸臂且控制其擺動的速度和擺動的方向進行切割煤巖。鑒于原液壓控制系統在實際生產中面臨控制精度不足、響應速度慢的問題,對原液壓控制系統做如下改進:采用電液比例中的比例節流進行調速,采用比例方向閥替代原方向閥實現對方向的控制。
比例節流調速方式涉及的節流元件主要包括比例方向閥、比例調速閥以及比例節流閥,供油方式是定量泵供油,主要調節節流口前后的壓差以及通流的面積,進而控制執行器的進入流量完成最終調速。該方法適合被應用于具有較小功率的場景,具有高控制精度、快速響應的能力、簡單結構、低損失以及高效率。對速度與方向的控制均采用比例方向閥,方向的控制主要基于電磁鐵的得失電。
除此之外,整個液壓系統的速度傳感器與位移傳感器分別檢測并調控該掘進機的速度以及方向。采用速度傳感器可檢測活塞的速度,并輸出相關的電信號,通過信號放大器對比設置速度的信號,控制方向閥的開口程度基于電磁鐵,完成調節速度;采用位移傳感器檢測活塞的位置,通過信號放大器比較與原設置位置的信號并放大[3-4]。AM-50型號掘進機的新改控制回路如圖2 所示。

圖2 AM-50型號掘進機的新改控制回路
4 結論
對掘進機原液壓控制系統調節方式進行改進,通過比例方向閥來控制掘進機的速度和方向,達到了提升掘進機液壓系統控制效率、掘進效率和運行安全性的目的。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
