基于AMESim的礦井提升機(jī)液壓制動(dòng)系統(tǒng)優(yōu)化與仿真分析
2021-09-22 02:22:58羅宏博張建銳胡天林
礦山機(jī)械 2021年9期
關(guān)鍵詞:系統(tǒng)
羅宏博,張建銳,胡天林,周 游
1隴東學(xué)院機(jī)械工程學(xué)院 甘肅慶陽(yáng) 745000
2卡特彼勒技術(shù)研發(fā) (中國(guó)) 有限公司青島分公司 山東青島 266061
煤炭工業(yè)在我國(guó)國(guó)民經(jīng)濟(jì)發(fā)展中占有舉足輕重的地位,其安全、高效生產(chǎn)是優(yōu)化我國(guó)能源供應(yīng)結(jié)構(gòu)和電力市場(chǎng)資源配置,促進(jìn)我國(guó)經(jīng)濟(jì)戰(zhàn)略目標(biāo)實(shí)現(xiàn)的重要保證。作為煤礦生產(chǎn)流程中關(guān)鍵設(shè)備的礦井提升機(jī),擔(dān)負(fù)著礦場(chǎng)人員和物料的升降,井上井下聯(lián)系,礦車調(diào)度,井下綜采設(shè)備的安裝、拆卸、搬遷,以及各種生產(chǎn)物資輔助運(yùn)輸?shù)热蝿?wù),它的安全、穩(wěn)定運(yùn)行是整個(gè)煤礦安全生產(chǎn)的保證[1]。礦井提升機(jī)制動(dòng)性能的優(yōu)劣是影響生產(chǎn)企業(yè)事故率和經(jīng)濟(jì)效益的主要因素,因此,提升機(jī)制動(dòng)過(guò)程的平穩(wěn)性與可靠性成為了廣大提升設(shè)備研究人員的研究重點(diǎn)[2]。
據(jù)不完全統(tǒng)計(jì),在礦井提升機(jī)以往出現(xiàn)的故障中,60% 以上都是由于制動(dòng)系統(tǒng)故障造成的[3]。為保證提升設(shè)備能夠安全、可靠、穩(wěn)定地運(yùn)行,除了在實(shí)際生產(chǎn)過(guò)程中加強(qiáng)對(duì)運(yùn)行狀態(tài)參數(shù)的監(jiān)控之外,最重要的是在制動(dòng)系統(tǒng)設(shè)備安裝前,在深入研究礦井提升機(jī)制動(dòng)系統(tǒng)工作原理的基礎(chǔ)上,對(duì)影響制動(dòng)性能的重要參數(shù)進(jìn)行評(píng)估,基于制動(dòng)系統(tǒng)的理論數(shù)學(xué)模型,借助于成熟仿真軟件完成多工況運(yùn)行仿真分析,為礦井提升機(jī)制動(dòng)系統(tǒng)安全、可靠、穩(wěn)定運(yùn)行提供優(yōu)化方案與依據(jù)[4]。現(xiàn)代計(jì)算機(jī)技術(shù)的發(fā)展、高效可靠的液壓系統(tǒng)仿真軟件的進(jìn)步,為煤礦生產(chǎn)設(shè)備動(dòng)態(tài)特性仿真分析及試驗(yàn)研究提供了可靠的軟件支撐,通過(guò)仿真計(jì)算可提前預(yù)知回路設(shè)計(jì)的科學(xué)性、合理性及系統(tǒng)運(yùn)行的穩(wěn)定性和可靠性,便于在設(shè)備運(yùn)行安裝前對(duì)方案進(jìn)行優(yōu)化和完善,避免事故發(fā)生。
1 恒力矩制動(dòng)系統(tǒng)原理
1.1 應(yīng)用現(xiàn)狀
礦井提升機(jī)的制動(dòng)系統(tǒng)主要分為兩類,即恒力矩制動(dòng)和恒減速制動(dòng)。目前,我國(guó)礦井提升機(jī)大多采用恒力矩制動(dòng)系統(tǒng),但對(duì)纏繞式提升機(jī)而言,由于鋼絲繩自重較大,在井口或井底速度較大,導(dǎo)致速度減幅較大,對(duì)提升機(jī)沖擊較大,同時(shí)還存在殘壓過(guò)高、響應(yīng)時(shí)間長(zhǎng)、液壓膠管震蕩、制動(dòng)載荷不平衡等缺點(diǎn)。本研究通過(guò)添加液壓元件對(duì)恒力矩制動(dòng)系統(tǒng)進(jìn)行優(yōu)化改造,在實(shí)現(xiàn)恒力矩制動(dòng)的基礎(chǔ)上,避免負(fù)載對(duì)提升機(jī)制動(dòng)效果的影響[5]。
礦井提升機(jī)制動(dòng)系統(tǒng)是機(jī)電液一體化的綜合,工作原理如圖 1 所示,主要由液壓工作站、控制裝置和盤(pán)式制動(dòng)器等組成。

圖1 液壓制動(dòng)系統(tǒng)的工作原理Fig.1 Working principle of hydraulic braking system
1.2 優(yōu)化方案
根據(jù)安全生產(chǎn)的要求,結(jié)合井下作業(yè)的實(shí)際情況,在不改變恒力矩系統(tǒng)原有功能的基礎(chǔ)上,對(duì)制動(dòng)系統(tǒng)優(yōu)化升級(jí),主要分為以下幾個(gè)方面:
(1) 增加專門(mén)的蓄能裝置,確保系統(tǒng)制動(dòng)過(guò)程中油壓的穩(wěn)定;
(2) 制動(dòng)系統(tǒng)配備 2 個(gè)動(dòng)力回路,一回路工作,一回路備用,保證提升系統(tǒng)作業(yè)的穩(wěn)定性和可靠性;
(3) 穩(wěn)壓溢流裝置選用電液比例溢流閥,通過(guò)多級(jí)過(guò)濾增加提升設(shè)備抗污能力和系統(tǒng)動(dòng)態(tài)性能;
(4) 整個(gè)系統(tǒng)壓力和信號(hào)的檢測(cè)與控制實(shí)現(xiàn)閉環(huán)控制,確保系統(tǒng)具備獨(dú)立的故障診斷監(jiān)測(cè)功能[5]。
1.3 數(shù)學(xué)模型
盤(pán)式制動(dòng)器的理論模型可以簡(jiǎn)化成帶有復(fù)位彈簧的液壓缸模型[6-8],其組成如圖 2 所示,制動(dòng)器主要參數(shù)如表 1 所列。

圖2 盤(pán)式制動(dòng)器的受力分析Fig.2 Force analysis of disc brake
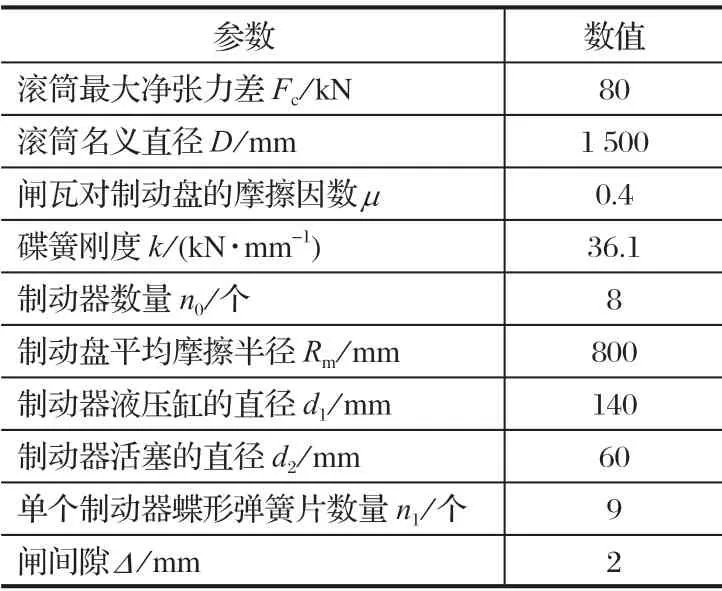
表1 盤(pán)式制動(dòng)器的主要參數(shù)Tab.1 Main parameters of disc brake
礦井提升機(jī)停車,盤(pán)式制動(dòng)器處于全制動(dòng)狀態(tài),制動(dòng)液壓缸油液泄壓,通過(guò)回油管路流回油箱,壓力為 0。此時(shí)碟簧力等于制動(dòng)正壓力

式中:F2為碟簧力;N為制動(dòng)正壓力;k為碟簧剛度;Δ0為碟簧的變形量;n1為單個(gè)制動(dòng)器碟形彈簧片數(shù)量。
礦井提升機(jī)工作,盤(pán)式制動(dòng)器處于全開(kāi)狀態(tài),制動(dòng)液壓缸壓力為工作壓力,制動(dòng)正壓力為 0。此時(shí),活塞推力F1等于碟簧力F2。

全制動(dòng)狀態(tài)下,閘瓦對(duì)制動(dòng)盤(pán)的制動(dòng)力矩

式中:Rm為制動(dòng)盤(pán)平均摩擦半徑;μ為閘瓦對(duì)制動(dòng)盤(pán)的摩擦因數(shù);n0為制動(dòng)器數(shù)量。
為保證安全,《煤礦安全規(guī)程》規(guī)定Mz應(yīng)該滿足 3 倍靜力矩Mj的要求,即

式中:Fc為最大凈張力差;D為卷筒名義直徑。
根據(jù)式 (3) 和式 (4),制動(dòng)器的正應(yīng)力

在全制動(dòng)到貼閘的過(guò)程中,活塞推力

式中:N′為閘盤(pán)對(duì)閘瓦的反作用力,全制動(dòng)到貼閘過(guò)程中,N′從最大值N降到 0。
貼閘是盤(pán)式制動(dòng)器將要施加制動(dòng)正壓力,但未開(kāi)始的臨界狀態(tài)。貼閘時(shí),活塞推力

盤(pán)式制動(dòng)器制動(dòng)的貼閘理論油壓

全開(kāi)閘狀態(tài)時(shí),碟簧力

盤(pán)式制動(dòng)器處于全開(kāi)閘狀態(tài),碟簧的變形量

盤(pán)式制動(dòng)器處在全制動(dòng)狀態(tài),碟簧的變形量

在實(shí)際工作中,盤(pán)式制動(dòng)器存在各種阻力pf,所以實(shí)際最大工作油壓

2 液壓制動(dòng)系統(tǒng)仿真模型
根據(jù)礦井提升機(jī)液壓系統(tǒng)的工作原理,該模型主要由液壓工作站、比例溢流閥、電磁控制閥、蓄能器和盤(pán)式制動(dòng)器組成,盤(pán)式制動(dòng)器被簡(jiǎn)化成液壓缸、質(zhì)量塊和碟簧的組合裝置。
2.1 元件模型的建立
(1) 制動(dòng)器的 AMESim 模型 AMESim 元件庫(kù)中沒(méi)有現(xiàn)成的制動(dòng)器模型,使用液壓元件庫(kù)和機(jī)械庫(kù)中相關(guān)元件進(jìn)行搭建,根據(jù)盤(pán)式制動(dòng)器的工作原理及結(jié)構(gòu)搭建的模型如圖 3 所示。
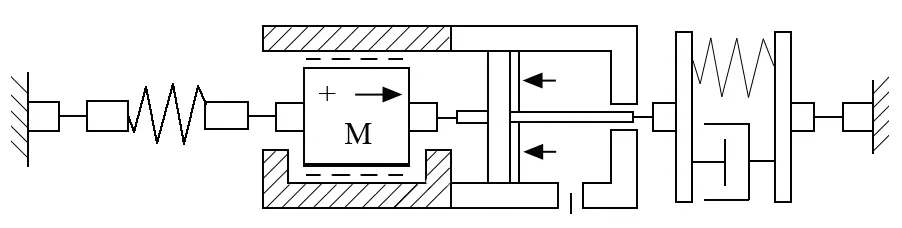
圖3 盤(pán)式制動(dòng)器的仿真模型Fig.3 Simulation model of disc brake
(2) 蓄能器的 AMESim 模型 在 HCD 庫(kù)中可以得到蓄能器模型如圖 4 所示。

圖4 蓄能器模型Fig.4 Model of energy accumulator
(3) 二位三通電磁換向閥 根據(jù)回路動(dòng)作需要,建立了二位三通電磁換向閥模型 (見(jiàn)圖 5),實(shí)現(xiàn)提升機(jī)制動(dòng)器二級(jí)調(diào)壓動(dòng)作。

圖5 二位三通電磁換向閥模型Fig.5 Model of two-position 3-way electromagnetic directional valve
2.2 仿真回路的參數(shù)設(shè)置和系統(tǒng)模型
按照實(shí)際生產(chǎn)過(guò)程中的結(jié)構(gòu)及運(yùn)行工況,根據(jù)理論計(jì)算和相關(guān)資料數(shù)據(jù),礦井提升機(jī)液壓制動(dòng)系統(tǒng)主要仿真參數(shù)設(shè)置如表 2 所列[9-11]。按照提升機(jī)液壓制動(dòng)系統(tǒng)的工作原理和結(jié)構(gòu)特點(diǎn),建立了基于AMESim軟件的液壓制動(dòng)系統(tǒng)仿真計(jì)算模型,如圖 6 所示。
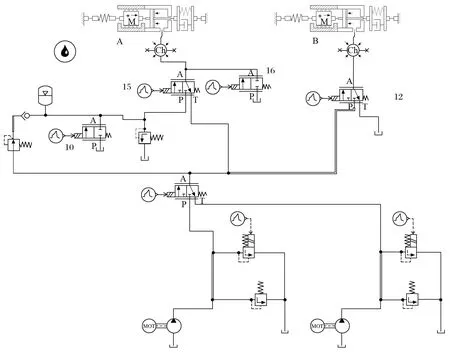
圖6 液壓制動(dòng)系統(tǒng)的仿真模型Fig.6 Simulation model of hydraulic braking system
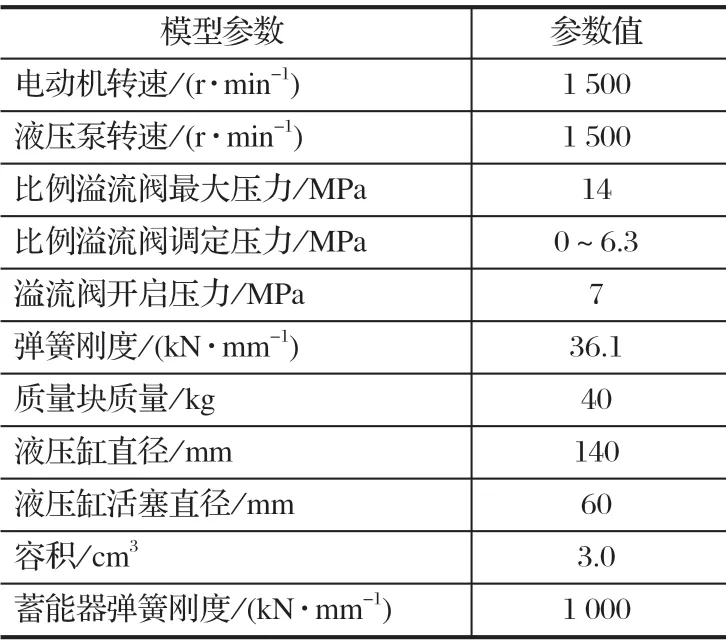
表2 液壓制動(dòng)系統(tǒng)仿真參數(shù)Tab.2 Simulation parameters of hydraulic braking system
3 仿真分析
礦井提升機(jī)盤(pán)式制動(dòng)器的制動(dòng)力矩主要是由碟簧的正壓力產(chǎn)生的。當(dāng)閘瓦開(kāi)閘時(shí),制動(dòng)器液壓缸的油液在活塞上產(chǎn)生一定的作用力,使碟簧受壓,作用在制動(dòng)盤(pán)上的制動(dòng)力矩減小或消除,實(shí)現(xiàn)開(kāi)閘。液壓缸主要通過(guò)比例溢流閥來(lái)調(diào)整和控制主油路工作壓力,從而使盤(pán)式制動(dòng)器液壓缸內(nèi)部的油壓增大或減小。當(dāng)閘瓦合閘時(shí),制動(dòng)液壓缸內(nèi)壓力為 0,碟形彈簧正壓力最大,從而產(chǎn)生最大的制動(dòng)力矩,實(shí)現(xiàn)制動(dòng);隨著液壓缸內(nèi)壓力逐漸增大,碟簧與液壓缸液壓力的合力減小,制動(dòng)力矩減小,制動(dòng)器開(kāi)閘,制動(dòng)消除[6]。
3.1 啟動(dòng)過(guò)程仿真分析
盤(pán)式制動(dòng)器在啟動(dòng)過(guò)程中,通過(guò)蓄能器、電磁閥、溢流閥等液壓元件控制回路的動(dòng)作,使制動(dòng)液壓缸內(nèi)的壓力根據(jù)比例溢流閥的控制信號(hào)按照比例變化。
仿真設(shè)置:0~5 s,礦井提升機(jī)處于正常停車狀態(tài),系統(tǒng)壓力 0,盤(pán)式制動(dòng)器合閘;5~10 s,設(shè)置比例電磁鐵信號(hào)為全壓信號(hào)的 50%;10~15 s,設(shè)置比例電磁鐵信號(hào)為全壓信號(hào)的 100%。按上述設(shè)置仿真分析制動(dòng)器液壓缸壓力的變化及穩(wěn)定性,結(jié)果分別如圖 7、8 所示。
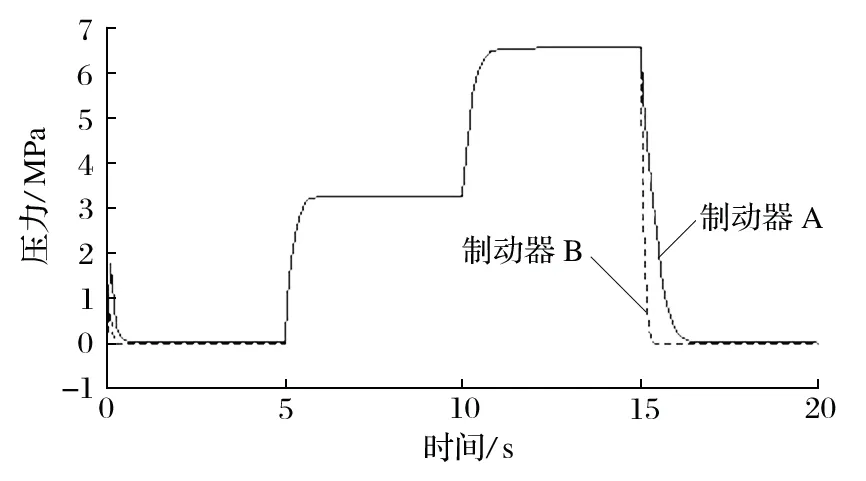
圖7 制動(dòng)液壓缸壓力變化曲線Fig.7 Variation curve of pressure of braking cylinder

圖8 制動(dòng)液壓缸活塞位移變化曲線Fig.8 Variation curve of displacement of piston of braking cylinder
由圖 7、8 可知,在 0~5 s,盤(pán)式制動(dòng)器主油路的壓力為零,在電動(dòng)機(jī)啟動(dòng)之時(shí),液壓工作站的壓力給系統(tǒng)主壓力產(chǎn)生一定的振動(dòng),但振動(dòng)的幅值很小,時(shí)間也很短,不會(huì)對(duì)系統(tǒng)的穩(wěn)定性產(chǎn)生很大的影響;在 5~ 10 s,比例溢流閥控制信號(hào)為全壓信號(hào)的 50%,主系統(tǒng)壓力增壓到 3.5 MPa;在 10~15 s,比例溢流閥控制信號(hào)變?yōu)槿珘盒盘?hào),主系統(tǒng)壓力達(dá)到 6.8 MPa。
剛開(kāi)始,碟簧的正壓力最大,制動(dòng)器合閘。隨著比例溢流閥進(jìn)口油壓增大,制動(dòng)液壓缸內(nèi)的油液壓力增大,當(dāng)壓力增大到 2.8 MPa 時(shí),制動(dòng)液壓缸活塞位移L為 0,此時(shí),制動(dòng)液壓缸內(nèi)的油液壓力等于碟簧正壓力,制動(dòng)器處于合閘與開(kāi)閘的臨界狀態(tài);當(dāng)系統(tǒng)壓力大于2.8 MPa 時(shí),盤(pán)式制動(dòng)器的碟簧被壓縮,盤(pán)式制動(dòng)器開(kāi)閘,礦井提升機(jī)正常開(kāi)車。
在15~20 s,比例電磁閥斷電,這時(shí)制動(dòng)器 B 液壓缸壓力迅速降為 0,在碟簧正壓力的作用下,制動(dòng)器合閘,實(shí)現(xiàn)制動(dòng)。盤(pán)式制動(dòng)器 A 由于蓄能器里面儲(chǔ)存了一定的能量,可維持制動(dòng)液壓缸一個(gè)短暫的平衡,在 12 s 時(shí)候,制動(dòng)器 A 液壓缸壓力降為 0。由此可見(jiàn),制動(dòng)器 A的合閘滯后于制動(dòng)器 B。
由圖 7、8 可知,兩盤(pán)式制動(dòng)器液壓缸內(nèi)的壓力變化曲線和活塞位移變化曲線基本一致,隨時(shí)間的同步性較高。由此可知,系統(tǒng)具有很高的穩(wěn)定性和同步性。
3.2 礦井提升機(jī)制動(dòng)器合閘、一級(jí)制動(dòng)、二級(jí)制動(dòng)過(guò)程仿真
礦井提升機(jī)在井中的位置不同,其需要的安全制動(dòng)級(jí)別不同。罐籠在井口附近,需要進(jìn)行一級(jí)制動(dòng);罐籠在井筒中,需要進(jìn)行二級(jí)制動(dòng)。
仿真設(shè)置:0~5 s,礦井提升機(jī)處于正常停車狀態(tài),制動(dòng)液壓系統(tǒng)壓力 0,盤(pán)式制動(dòng)器合閘;5~10 s,蓄能器儲(chǔ)能和制動(dòng)液壓缸通入壓力油,盤(pán)式制動(dòng)器制動(dòng)力矩減小,制動(dòng)器開(kāi)閘,礦井提升機(jī)正常工作;10~15 s 為二級(jí)制動(dòng)過(guò)程,15~20 s 為一級(jí)制動(dòng)過(guò)程。按上述設(shè)置仿真分析不同工況下活塞壓力變化,結(jié)果分別如圖 9、10 所示。

圖9 不同工況下活塞壓力變化曲線Fig.9 Variation curve of pressure of piston in various operation modes

圖10 不同工況下活塞推力變化曲線Fig.10 Variation curve of thrust of piston in various operation modes
如圖 9、10 所示,在 0~5 s,比例溢流閥斷電,盤(pán)式制動(dòng)器液壓缸壓力為 0,碟簧的制動(dòng)力矩最大,制動(dòng)器合閘,礦井提升機(jī)停車;在 5~10 s,蓄能器充壓和制動(dòng)液壓缸增壓過(guò)程,盤(pán)式制動(dòng)器開(kāi)閘,礦井提升機(jī)正常工作;10~15 s 為二級(jí)制動(dòng)過(guò)程。制動(dòng)過(guò)程中,先是比例溢流閥斷電,制動(dòng)器 B 液壓缸壓力降為 0,實(shí)現(xiàn)制動(dòng);制動(dòng)器 A 液壓站進(jìn)油壓力降為 0,但是蓄能器里儲(chǔ)存了能量,通過(guò)溢流閥 11 將其壓力調(diào)整為 5.8 MPa。第 16 s 后,A 制動(dòng)液壓缸壓力降為0,A、B 同時(shí)泄壓,實(shí)現(xiàn)一級(jí)制動(dòng)過(guò)程。
如圖 9、10 所示,當(dāng)系統(tǒng)壓力為 0 時(shí),制動(dòng)液壓缸內(nèi)的活塞推力為 0,壓力變化曲線和活塞推力變化曲線趨勢(shì)一致,在制動(dòng)過(guò)程中兩制動(dòng)器具有較好的同步性,制動(dòng)液壓缸壓力變化和摩擦力隨時(shí)間變化基本一致,能保證一、二級(jí)制動(dòng)的穩(wěn)定性和可靠性。
4 結(jié)論
根據(jù)礦井提升機(jī)恒力矩制動(dòng)系統(tǒng)的工作原理和結(jié)構(gòu)特點(diǎn),按照煤礦安全生產(chǎn)的要求對(duì)其改造升級(jí),基于AMESim 軟件平臺(tái)搭建了升級(jí)后的制動(dòng)器仿真模型,仿真結(jié)果表明:
(1) 改造后的液壓制動(dòng)回路壓力控制準(zhǔn)確,穩(wěn)定性高,響應(yīng)快,制動(dòng)回路的沖擊小。
(2) 在原有恒力矩制動(dòng)系統(tǒng)基礎(chǔ)上提出的改造方案,結(jié)構(gòu)簡(jiǎn)單、成本低,對(duì)實(shí)際生產(chǎn)具有一定的指導(dǎo)意義。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
