一種新的四輪獨立驅動電動汽車橫擺穩定性控制策略
2021-09-22 20:12:07譚琳
科技研究 2021年22期
譚琳



摘要:在四輪獨立驅動電動汽車行駛中,可通過橫擺穩定性控制方法對車身橫擺姿態進行調整以減少車輛側滑、甩尾等危險情況的出現。以某四輪輪邊驅動電動客車為對象,分析了二、三自由度車輛參考模型各自的特點,在橫擺穩定性控制方法中設計了復合理想車輛參考模型及其選擇方法,提出了將理想參考模型與動態面滑模控制相結合的滑模防抖振控制方法。針對所提方法,建立了基于Matlab/Simulink和TruckSim聯合仿真模型,參考國外FMVSS 136標準,進行了多個條件下的雙移線試驗工況仿真試驗和分析。結果表明,基于復合理想車輛參考模型和防抖滑模控制的橫擺穩定性控制方法能夠實現高低附著路面和高低速度下車輛穩定性的有效控制。
關鍵詞:車輛參考模型;四輪驅動;電動汽車;橫擺穩定控制
中圖分類號:U461.1 DOI:20180635
隨著汽車主動安全技術的不斷發展,車身電子穩定性控制系統(ESP)逐漸被推廣。對于四輪獨立驅動電動汽車而言,由于其車輪驅動轉矩獨立可控,因此可以通差動驅動實現車輛橫擺穩定性控制。但控制方法或策略如果運用不當反而會導致車輛受損甚至發生危險情況。
車輛橫擺穩定性控制算法,國內外學者也進行了大量相關研究。亞琴[1]人通過相平面分析提出了汽車橫擺穩定性控制方法,施繼忠[2]等人對滑模控制算法在車輛狀態跟蹤上的應用進行了研究,熊璐[3-4]等人對極限工況下車輛行駛的穩定性判據進行了研究,同時提出了基于縱向力分配的輪邊驅動電動汽車穩定性控制方法,歐健[5]等人在橫擺穩定性控制的基礎上研究了防側翻控制策略,王成[6]、Wenbo Chu[7]、Song Dandan[8]、Fei Liu[9]、Hamzah[10]等人研究的車輛橫擺穩定性控制算法中都以線性二自由度車輛模型作為參考模型。日本學者Naoki Ando[11]和Hiroshi Fujimoto[12]等人提出了基于輪胎側向力傳感器的輪轂電機驅動電動汽車橫向穩定性控制方法以及具有主動前后轉向和四輪驅動/制動力分配的電動車輛的最佳橫擺角控制方法等。C.I.Chatzikomis· K.N.Spentzas[13]等人對配備電子穩定控制(ESC)的車輛與帶有四輪轉向(4WS)的車輛進行了比較。
目前提出的橫擺穩定控制方法中,主要以線性二自由度車輛模型作為參考模型,且控制方法說明不是較完整。本文提出一種以理想二、三自由度復合車輛參考模型為基礎,集成改進動態面滑模變結構控制和按載荷分配轉矩的橫擺穩定性控制方法,并進行仿真驗證。
1理想車輛參考模型
目前的車輛橫擺穩定性控制算法主要是依據理想車輛參考模型,進而實時調整車輪制/驅動力來跟蹤理想的車身姿態。其參考模型多數采用了二自由度車輛模型[5-10],但是由于其做了較多簡化,在勻速、低速、小轉向等接近穩態情況下時可以根據駕駛員意圖比較準確的估算出車輛的側向及橫擺狀態參數,而在車速變化比較快、轉向角較大等極限工況下,該模型的估計與實際車輛狀態差距較大,導致控制難度大大增加,甚至可能出現失控危險。
2.1基于復合參考模型的橫擺角速度目標值的確定
在低速小轉向時,二自由度模型能夠較接近地反映實車運行中橫擺角速度的情況,而高速大轉向時擴展三自由度模型可以較接近地反映實際橫擺角速度的情況。因此提出基于復合參考模型的車輛橫擺穩定性控制算法,通過判斷當前車輛的車速及方向盤轉角的大小來自動選擇二自由度或者擴展三自由度車輛模型作為控制算法的參考模型,從而確定橫擺角速度的目標值。其判斷條件如下:
當滿足以上條件時選擇三自由度車輛模型為參考模型,否則選擇擴展三自由度車輛模型為參考模型。其中δw為方向盤轉角,μ為路面附著系數,vT、δT、μT分別為車速、方向盤轉角及路面附著系數的設定值,由試驗標定確定。
2.2滑模控制算法
基于滑膜變結構控制在非線性系統控制中的優良魯棒性、滑動模態的可設計性及無需系統在線辨識等優點,采用改進動態面滑模變結構控制方法,該改進方法采用動態面滑模控制與趨近律相結合,并結合函數代替的方法對滑模抖振進行消除改進[6]。
2.3橫擺力矩分配
直接橫擺力矩分配方法主要包括:平均分配法、I曲線分配法、驅動系統效率最高分配法、路面附著消耗最小分配法、前后輪同時達到附著極限分配法。本文采用按照各車輪垂直載荷所占比例的方法進行分配[5],此方法輪胎附著力利用率高。
3 仿真試驗與分析
為了說明前述方法,以某四輪輪邊驅動電動客車為研究對象,基于Simulink/TruckSim建立聯合仿真試驗平臺進行驗證,其結構如圖3所示。
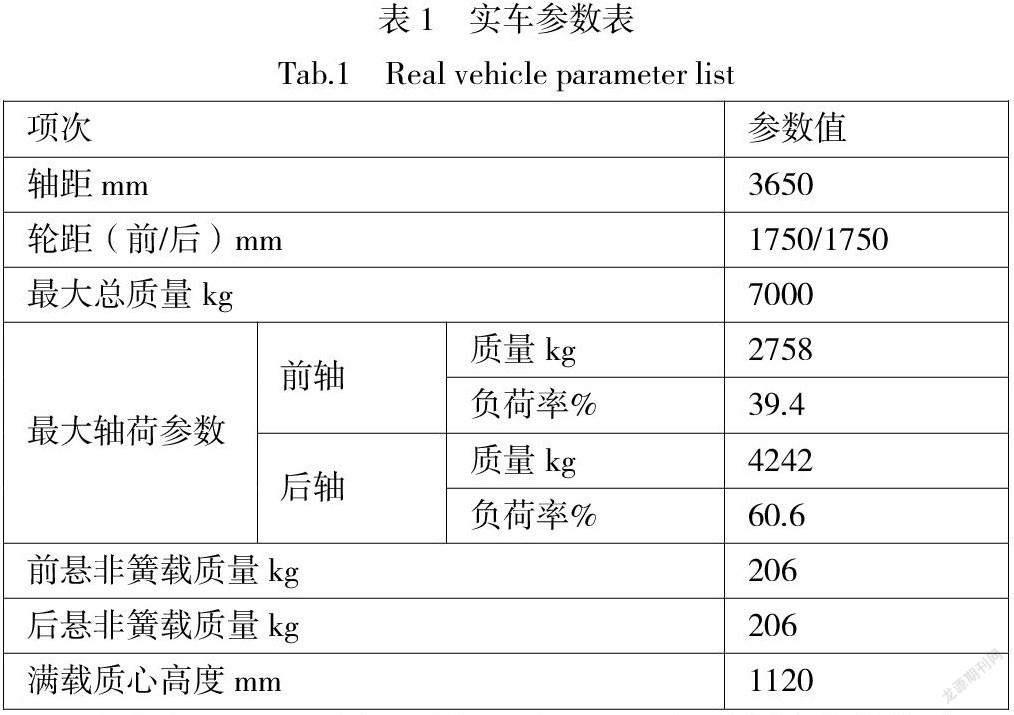
聯合仿真模型中,在TruckSim環境下搭建整車模型,包括車身模型、轉向系統、制動系統、驅動系統、懸架及輪胎模型等,并設計包含路面模型的試驗工況。實車參數如表1所示。而在Simulink中搭建參考模型及控制策略。
參考標準[14],設定雙移線試驗工況,對整車橫擺控制效果進行仿真試驗驗證。對比無控制策略、以二自由度模型或擴展三自由度模型為參考模型的控制算法對整車的控制效果。(注:無控制策略即驅動轉矩平均分配)。
3.1 高附著系數路面雙移線試驗
試驗要求:路面平整,附著系數μ=0.85,坡度小于1%。
評價指標:橫擺角速度、質心側偏角、側向加速度、輪邊驅動轉矩、行車軌跡及最高入口車速。
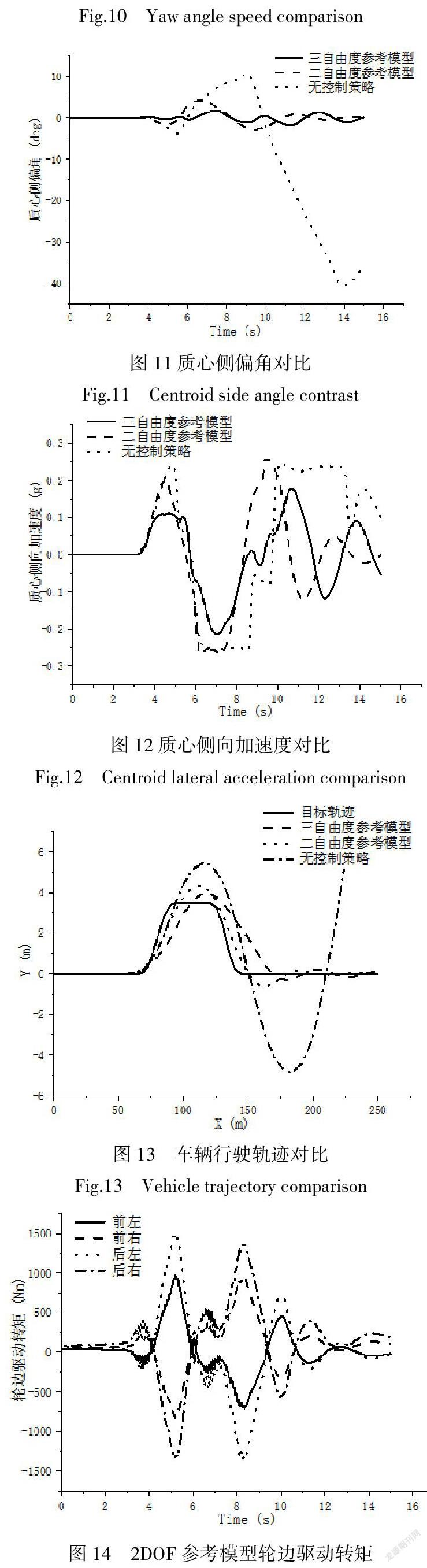
3.2低附著系數路面(冰雪道路)雙移線試驗
試驗要求:冰雪路面,附著系數μ=0.3,坡度小于1%。
評價指標:橫擺角速度、質心側偏角、側向加速度、輪邊驅動轉矩、行車軌跡及最高入口車速。
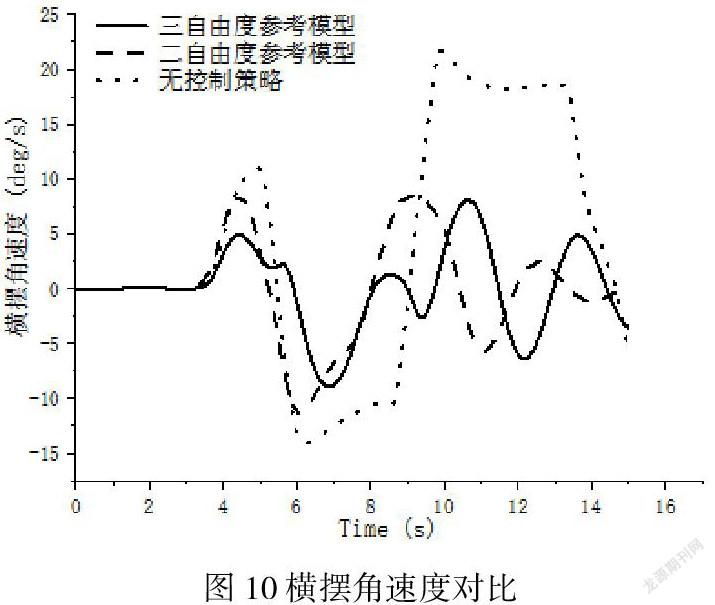
試驗結果如圖10-圖15所示。
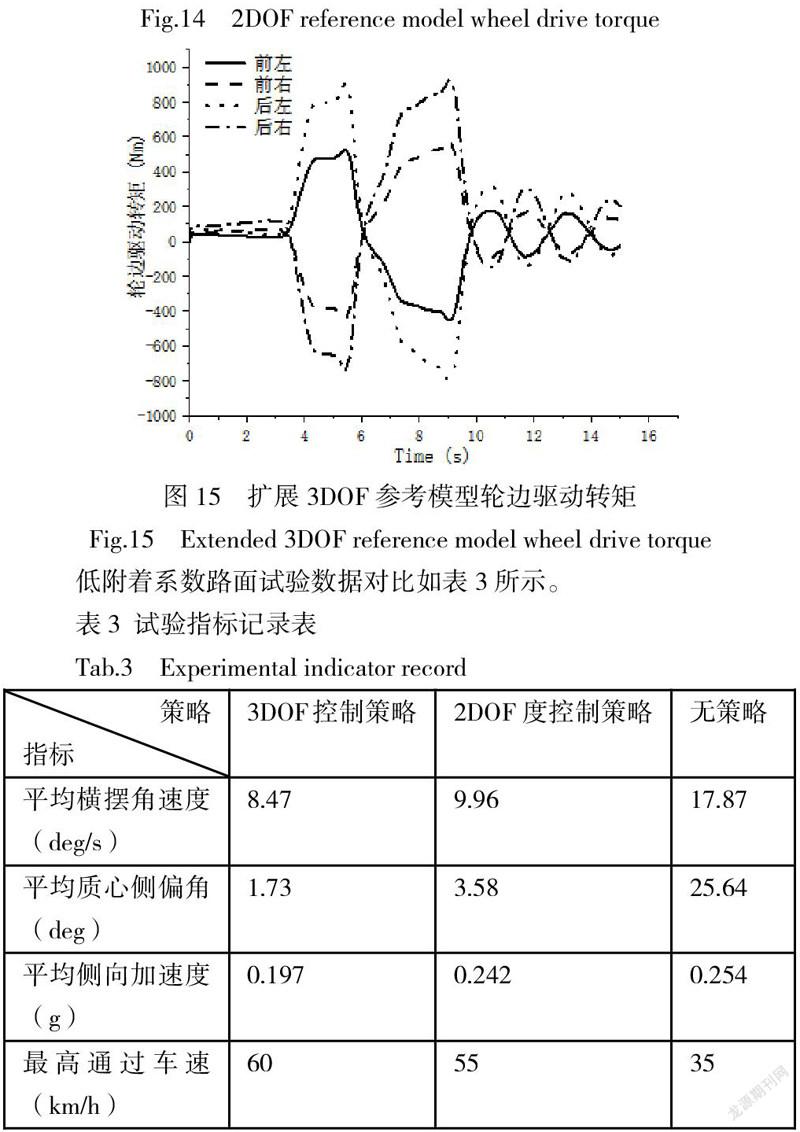
低附著系數路面試驗數據對比如表3所示。
由圖10-圖15試驗結果可知,在路面附著系數比較低時3DOF控制策略對整車的控制效果更好一些,表3指標對比亦可體現,與3.1試驗結果一致。說明在極限條件下3DOF控制策略的參考模型更加合理。同時對比圖14和圖15可知,3DOF控制策略中驅動轉矩更加平滑,并且四輪轉矩幅值較小,說明在此工況下擴展三自由度車輛參考模型的引入使控制輸入的實際值與參考值偏差減小,降低了控制難度,避免了滑模控制算法出現抖振現象。
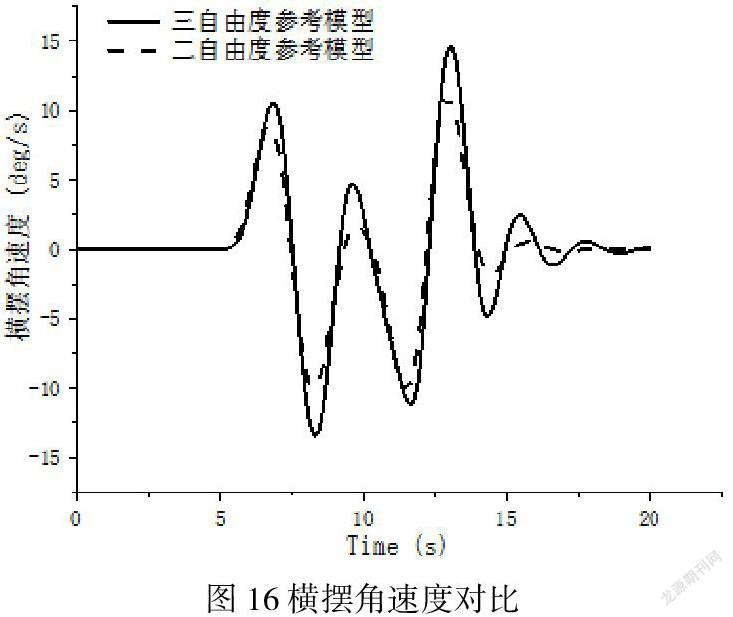
3.3高附著系數路面、低速雙移線試驗
試驗要求:路面平整,附著系數μ=0.85,坡度小于1%。
評價指標:橫擺角速度、質心側偏角、側向加速度、輪邊驅動轉矩及行車軌跡。
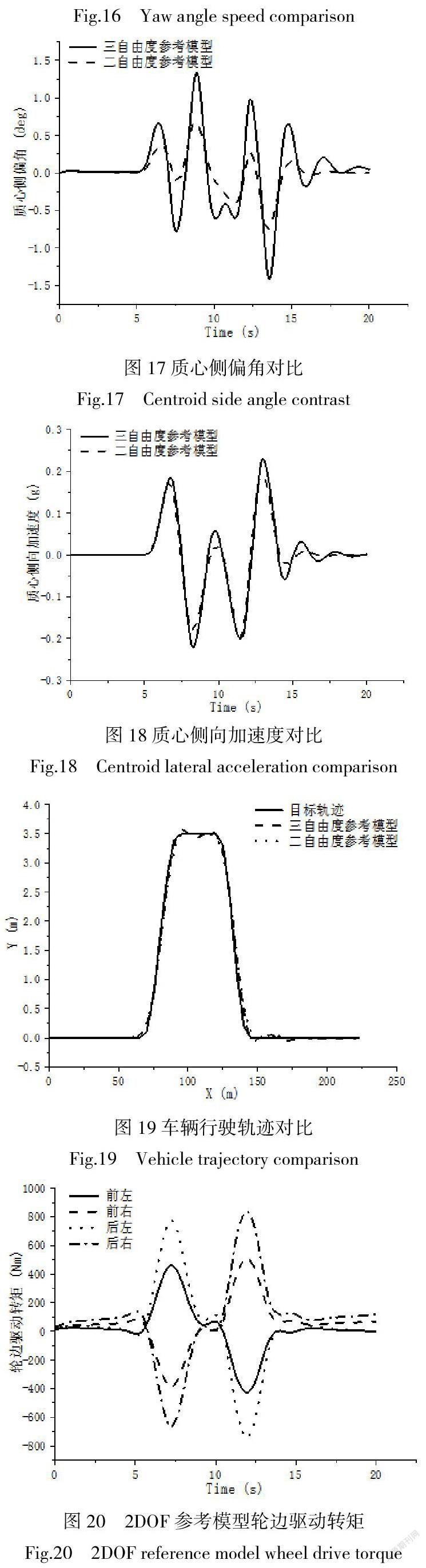
試驗結果如圖16-圖21所示。
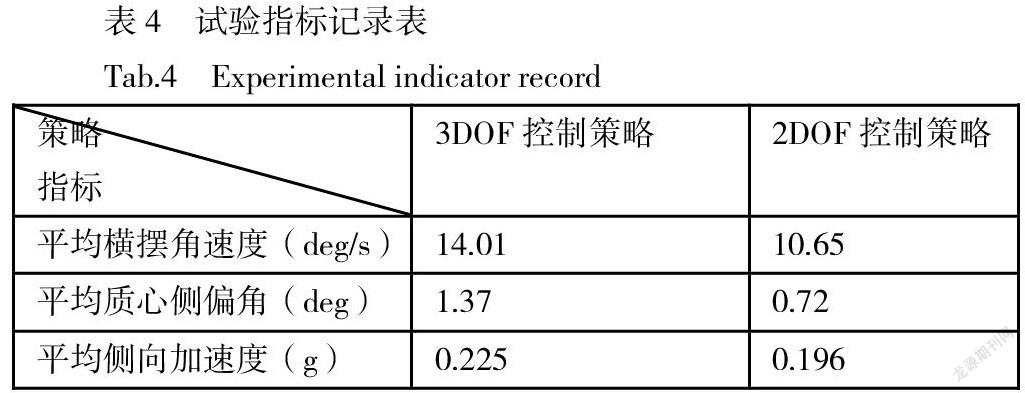
由圖16-圖21試驗結果可知,在良好道路、車速較低(40km/h)時,且驅動調節力矩相差不大的情況下,2DOF控制策略對于車輛的方向控制及側傾控制效果更好,與高速時(3.1試驗)正好相反。指標對比如表4所示。驗證了本文第2節所提出的復合參考模型車輛穩定性控制算法的可行性及有效性。
4結束語
本文面向四輪獨立驅動電動汽車,對基于理想參考模型的橫擺穩定性控制算法進行了仿真試驗與分析。所得主要結論如下:
(1)從車輛動力學模型及試驗的角度論證了二自由度車輛模型及擴展三自由度車輛模型分別在非極限和極限工況下對車輛實際橫擺運動狀態的描述特性,擴展三自由度車輛模型彌補了二自由度車輛模型在復雜極限工況中的不足。
(2)擴展三自由度車輛參考模型的引入降低了極限工況下橫擺穩定性控制難度,減少了滑模控制算法由于實際值與參考值相差較大引起的抖振現象發生,驅動電機的轉矩控制曲線未出現明顯抖振情況。
(3)提出了基于復合車輛參考模型并集成改進動態面滑模變結構控制和按載荷分配轉矩的橫擺穩定性控制方法。該方法能夠根據路況及車輛狀態選擇不同的參考模型進行運算,使其在極限工況下同樣具有較好的控制效果,擴大了橫擺穩定性控制算法的適用工況范圍,對車身姿態的控制是有效和可行的。
參考文獻
[1]王亞琴,田杰,蔡隆玉,楊敏.基于相平面的車輛穩定性DYC控制[J].制造業自動化,2014,36(12):38-40.
[2]施繼忠,張繼業,徐曉惠,胡永舉.含隨機干擾的車輛跟隨系統滑模控制[J].西南交通大學學報,2015,50(06):1088-1093.
[3]熊璐,曲彤,馮源,鄧律華.極限工況下車輛行駛的穩定性判據[J].機械工程學報,2015,51(10):103-111.
[4]熊璐,余卓平,姜煒,蔣造云.基于縱向力分配的輪邊驅動電動汽車穩定性控制[J].同濟大學學報(自然科學版),2010,38(03):417-421+426.
[5]歐健,程相川,周鑫華,楊鄂川,張勇.基于汽車穩定性控制系統的側翻控制策略[J].西南交通大學學報,2014,49(02):283-290.
[6]王成.四輪轂電機電動汽車狀態軟測量及操縱穩定性控制系統研究[D].吉林:吉林大學,2016.12.
[7]Chu,Wenbo.[Springer Theses]State Estimation and Coordinated Control for Distributed Electric Vehicles[J].2016,10.1007/978-3-662-48708-2.
[8]Song Dandan,Yang Tao.A research on internal model control for vehicle yaw stability[P].Information Science and Technology (ICIST),2014 4th IEEE International Conference on,2014.
[9]Fei Liu,LuXiong,Xiaopeng Wu.Design and experimental validation for stability control of four-wheel-drive electric vehicle[P].Transportation Electrification Asia-Pacific (ITEC Asia-Pacific),2014 IEEE Conference and Expo,2014.
[10]Hamzah,N.,Sam,Y.M.,Selamat,H.,Aripin,M.K.,Ismail,M.F..Yaw stability improvement for four-wheel active steering vehicle using sliding mode control[P].Signal Processing and its Applications (CSPA),2012 IEEE 8th International Colloquium on,2012.