國際空間站的新“手臂”:歐洲機械臂
2021-09-23 01:00:40遲惑
太空探索 2021年9期
關鍵詞:機械
文/ 遲惑
7月21日,歐空局研制的“歐洲機械臂”總算從拜科努爾空間中心發(fā)射升空,成為繼加拿大臂2、日本機械臂、中國空間站機械臂之外,太空中第四個大型機械臂。為了這一天,歐空局已經(jīng)等了20年。
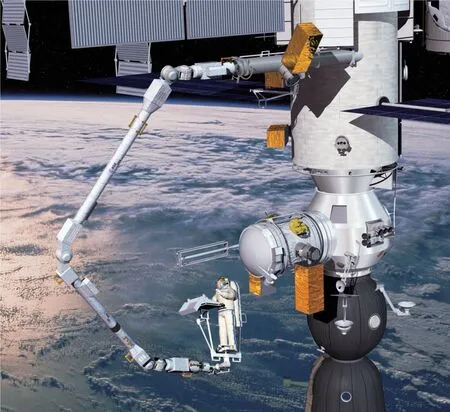
歐空局設想的未來歐洲機械臂艙外活動支持模式
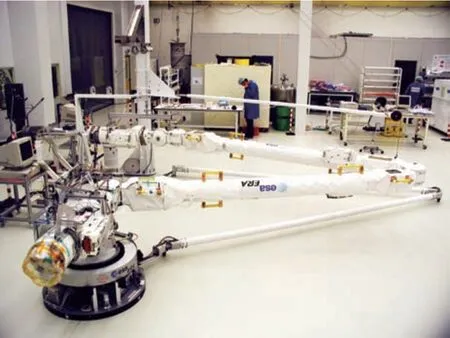
測試中的歐洲機械臂

俯視歐洲機械臂和“科學號”的結合過程
總算上天的歐洲機械臂
歐洲機械臂(ERA)是由荷蘭航天公司總承包,歐洲阿斯特里姆公司(如今的空客防務公司一部分)、SABCA公司和Stork公司分包。歐洲機械臂最初打算在2001年用航天飛機發(fā)射,安裝在國際空間站的俄羅斯模塊上。但是因為研制進度推遲、航天飛機退役,發(fā)射任務只能轉給俄羅斯質(zhì)子火箭,隨俄羅斯科學號多用途實驗室艙(MLM)發(fā)射。“科學號”一度打算在2015年發(fā)射,但一再推遲,最后就拖到了2021年。一個重點型號推遲20年才上天,這種事情也只會發(fā)生在歐洲這種什么事情都要國際協(xié)調(diào)的機制下。
歐洲機械臂長約10米,質(zhì)量約為620千克,由 7 個關節(jié)、 2 段手臂和2套末端效應器構成。和“加拿大臂2”以及中國機械臂一樣,歐洲機械臂采用了兩端對稱設計,兩段手臂兩端各有一個完整的3自由度腕部和末端效應器,讓歐洲機械臂可以在空間站的基點之間爬行。它主要用于俄羅斯艙段部分外掛設備的在軌裝配,如安裝隔熱板、拓展氣閘艙,并開展其他艙外服務,這些輔助功能將降低航天員在太空行走時的難度。
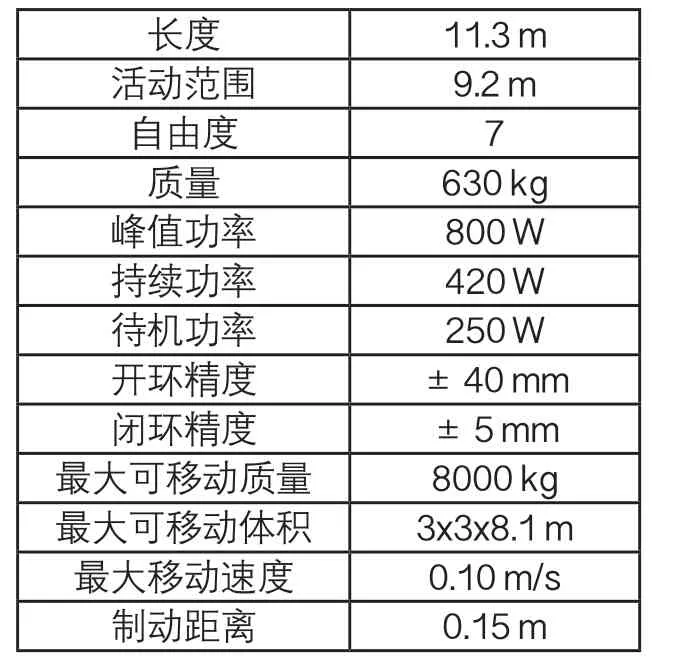
主要技術特性
歐洲機械臂的結構
歐洲機械臂主要包括以下主要部件:

即將與“科學號”結合的歐洲機械臂
歐洲很早就展出了“科學號”與歐洲機械臂的結合模型
1.末端效應器組件(EES)。它是歐洲機械臂的“手”,但是其實沒有手那么復雜。具體結構包括:抓斗機構(GM),包括基點(BP)和抓斗夾具(GF);綜合維修工具(IST)(包括抓斗夾具上的插座);扭矩/力傳感器(TFS),包括扭矩剛性機構(TRM)。

歐洲機械臂的艙外控制臺

歐洲機械臂的手腕
2.機械臂關節(jié)組件(MJS)。它由3個模塊化鉸鏈組成,結構基本相同,只有卷軸部分不同。這3個鉸鏈一起形成所謂的“腕”關節(jié)。其中包括:俯仰關節(jié)/偏航關節(jié)/滾動關節(jié),位于臂的兩端;肘關節(jié)使用與腕關節(jié)相同的基本硬件,但只有一個自由度。
3.發(fā)射固定機構。其作用是抑制發(fā)射過程中的意外運動。在俄羅斯“科學號”上的發(fā)射固定機構包括:固定鉤和支撐墊,屬于“科學號”的一部分;插銷和支撐墊,是歐洲機械臂結構的一部分。航天員要通過艙外活動來把機械臂從發(fā)射支架展開,具體工作包括松開固定鉤、激活一些特殊的機械特性。
4.服務型設備。主要包括:攝像機和照明裝置(CLU),連接器匹配/取消匹配機構;太空行走人機界面,也就是各類開關和按鈕;超越控制機構,在太空行走期間,航天員通過使用這些機構,可以超越電子控制設備,來手動控制歐洲機械臂的活動;太空行走時使用的可放置扶手。
功能強大的“手”
歐洲機械臂有兩個末端效應器,就像兩只手,雖然它們沒有手那么復雜,但功能依然十分強大。在軌運行期間,一端的末端效應器連接到一個基點上,可以在艙段和歐洲機械臂之間提供足夠的剛性連接,并為歐洲機械臂的運行提供電力、數(shù)據(jù)和視頻信號。另一端的末端效應器用作抓取器,能夠抓取配備有抓取夾具或基點的物體。此外,這個自由的末端效應器還要為整個歐洲機械臂提供扭矩/力值數(shù)據(jù),來支持歐洲機械臂的正常安全運行,它還可以向被抓取的物體提供機械支撐和電力,以及數(shù)據(jù)傳輸。

歐洲機械臂的抓斗實拍

歐洲機械臂即將與“科學號”結合
為了實現(xiàn)上述能力,末端效應器被分配了以下功能:測量扭矩/力,抓斗/導向裝置,電力、數(shù)據(jù)和視頻傳輸,插入綜合維修工具頭以提供機械動力,提供足夠的剛度。如果不需要測量扭矩/力,末端效應器就要保持剛性化。扭矩/力傳感器的剛性化能力,對于在末端效應器充當“肩部”時所需剛度以及運輸操作期間充當“手部”所需剛度,是必要的。

歐洲機械臂的肘部
1.外殼結構
末端效應器的主要承載結構,包括下殼體結構和帶電子單元的外殼。下殼體結構由3個加強筋組成,在加強筋上附有蓋板、接口環(huán),以及導向裝置。電子裝置外殼上裝有機械臂關節(jié)組件的滾動關節(jié)以及攝像頭、照明裝置的接口。外殼結構的所有零件均由高強度鋁合金制成,接口環(huán)和導向裝置由鈦合金制成,主軸和掛鉤由鋼制成。
2.驅(qū)動和傳感裝置
驅(qū)動和傳感裝置由驅(qū)動裝置、扭矩/力傳感器和扭矩/力傳感器剛性化機構組成。
驅(qū)動裝置包括一個內(nèi)部冗余的無刷式電動機、一組安裝在電機軸上的冗余霍爾傳感器、一個齒輪系和三個安裝在移動平臺上的帶螺母滾柱螺桿組成。齒輪/電機組件同步驅(qū)動滾柱螺桿。三個滾柱螺釘螺母安裝在平臺上,具備有限的浮動能力,滾柱螺桿的旋轉可以驅(qū)動平臺向上/向下移動。
扭矩/力傳感器是一個配備應變計的機電裝置,它能測量6個自由度上的扭矩和力。采集到的模擬信號經(jīng)電子裝置采集和處理,并發(fā)送至臂上計算機。扭矩/力傳感器具有溫度補償功能,并裝有剛性端部止動塊,防止機械過載。如果不需要扭矩/力傳感器的測量功能,并且需要增加扭矩/力傳感器的剛度,則用扭矩/力傳感器剛性機構進行阻斷。
扭矩/力傳感器剛性機構用來阻止扭矩/力傳感器工作。它動作的時候,會自動形成一個剛性結構,把末段效應器變成一個純粹的固定設備。不需要剛性化的時候,它會形成柔性結構,以保護機械臂不過載。
3.移動平臺
移動平臺負責啟動抓斗機構,負責集成維修工具頭部插入工作,并匹配系統(tǒng)線束接頭(用于電源、視頻和數(shù)據(jù)線)。公插頭將與位于基點/抓斗處的母插座結合,用3個冗余開關監(jiān)測平臺位置,為末端效應器電子單元提供狀態(tài)信息。除了通過開關進行監(jiān)控外,移動平臺還可以隨時通過執(zhí)行器單元電機的霍爾效應傳感器提供信號。
4.抓斗機構

歐洲機械臂

歐洲機械臂結構
抓斗夾具安裝在所有要用末端效應器處理的物體上。每個抓斗夾具都裝有連接器的母插座部分,通過這種插座,電力、信號和視頻數(shù)據(jù)被路由到被抓取的對象上。此外,抓斗夾具上還裝有綜合維修工具頭部插座,通過這個插座,可為被抓取的物體提供扭矩(例如擰緊/擰松)。歐洲機械臂的抓斗機構由3個鉤/桿系統(tǒng)組成,可以耦合到移動平臺上。抓斗機構在抓斗夾具或基點處拉動,直到它們和末端效應器之間的間隙閉合,然后抓斗機構剛性化并預緊。抓斗機構的掛鉤由螺旋彈簧不斷向外壓,在抓斗夾具或基點的抓取過程中,當一個吊鉤接觸到障礙物時,由于彈簧產(chǎn)生變形,吊鉤會產(chǎn)生約30牛頓的力。扭矩/力傳感器測量到反作用力后,通過電子單元傳輸至臂上計算機。然后末端效應器將對抓斗夾具/基點重新定位,以減輕誘導載荷。

歐洲機械臂正在安裝到“科學號”上

航天員正在為歐洲機械臂的來到接受訓練
5.系統(tǒng)線束接頭
安裝在移動平臺上的3個接頭將在一側的末端效應器和另一側的抓斗夾具或基點之間傳輸電力、視頻和數(shù)據(jù)。連接器通過浮動裝置安裝在移動平臺上,以提供橫向和角度偏差補償能力。每個連接器都有提供監(jiān)控匹配/未匹配狀態(tài)的功能。
6.綜合維修工具
綜合維修工具用于為被抓物體提供扭矩,例如擰緊或擰松螺栓,或收起散熱器組。綜合維修工具安裝在下端效應器室中,由電氣冗余無刷電機、齒輪箱和帶有彈出式裝置的工具頭組成。齒輪箱輸出軸驅(qū)動綜合維修工具插頭,插入抓斗夾具處的插座中,為螺釘接口提供機械動力。
7.基點
基點在機械結構上與抓斗夾具相同。它們沒有插座,但負責提供歐洲機械臂和艙段之間的所有系統(tǒng)線束連接。它們包含3個系統(tǒng)線束接頭的內(nèi)螺紋部分,用于歐洲機械臂的電力、信號和視頻數(shù)據(jù)傳輸和路由分配。基點還提供了末端效應器一側抓斗機構和另一側俄羅斯艙段之間的機械接口。
靈活的“關節(jié)”
歐洲機械臂比大多數(shù)工業(yè)機器人靈活得多。手臂的主要彎曲模式很重要,因為它要控制超過90%的總轉動慣量,是控制系統(tǒng)最主要的處理對象。歐洲機械臂結構緊湊、重量有限、剛度高、齒隙小、壽命長,需要在熱真空環(huán)境中工作,對接頭和鉸鏈單元的研發(fā)提出了嚴峻的挑戰(zhàn)。
手腕部分包含一個電子箱,獨立驅(qū)動3個電機。電子箱中有兩套印刷電路板實現(xiàn)冗余。肩關節(jié)和手腕各有單獨的電子箱,用于實現(xiàn)供電和遙測功能。肘部的電子設備箱位于肢體之間的矩形長方體中,構成結構荷載的一部分。因此,箱形結構用肋板進行了加固。

歐洲機械臂終于成行
每個接頭由以下機械元件組成:①電機裝置:電機、分解器、關節(jié)位置傳感器,用于將關節(jié)位置反饋給關節(jié)控制電子設備和制動器;②齒輪箱總成:用于扭矩傳遞和減速的四級行星齒輪系,包括軸承,潤滑油/潤滑脂;③電機外殼和軛架。此外,還為手動超控提供了太空行走時的訪問權限。其他非機械元件包括:①電纜和連接器;穿過接頭供外部使用的交叉線和連接至接頭內(nèi)電氣元件的入口線;②熱硬件、加熱器;③電纜蓋/連接器蓋。

歐洲七自由度機械臂,也可以爬行

熱真空測試中的歐洲機械臂
發(fā)射固定機構:“查理·卓別林”
歐洲機械臂固定在俄羅斯“科學號”的基座上發(fā)射。在發(fā)射過程中,兩個末端效應器都抓住一個特定基點,用它們來充當負載懸掛系統(tǒng)。在軌道運行的休眠階段,兩個末端效應器也都要抓住一個基點。在這種配置下,所有的電氣連接器都將與空間站相匹配。
固定機構被戲稱為“查理·卓別林”,用6個發(fā)射固定機構固定在”科學號”上。每個固定機構包括兩個掛鉤,掛鉤是可調(diào)的,歐洲機械臂上的嚙合銷不可調(diào)。掛鉤上的預緊力為500~1000牛頓。在歐洲機械臂和固定機構之間留有間隙,以便于組裝和適應熱膨脹,也方便釋放。固定機構分別位于肘關節(jié)、手腕電子箱和滾動關節(jié)上。
手動超控
為了方便安裝和維護,歐洲機械臂保留了手動超越控制功能。所謂“超越”就是人超越計算機,直接控制機械設備。在末端效應器執(zhí)行單元、集成維修工具和扭矩/力傳感器剛性機構中,可以實現(xiàn)太空行走時的手動超控。但發(fā)射過程中,致動器裝置和扭矩剛性機構的手動超控是不能工作的,以確保剛性機構處于關閉位置。在軌安裝歐洲機械臂期間,必須解除發(fā)射閉鎖機構。具體解除動作是,用超控工具插入致動器裝置和扭矩剛性機構手動超控接口的六角插座中。通過第一次插入,位于六角形插座內(nèi)的插銷被向后推到解鎖位置。閉鎖裝置確保插銷在此后所有在軌操作期間保持在解除閉鎖位置。

正在吊裝到科學號上的歐洲機械臂
手動超控插入口和位置指示器平時用蓋子覆蓋,以防止陽光遮擋和熱量泄漏。在啟動太空行走超控裝置之前,航天員必須將相關部分向后折疊,然后將其固定住。
歐洲機械臂由輕質(zhì)的鋁和碳纖維構成,能夠移動和安裝約8000千克的組件,末端定位精度可達5毫米。航天員能夠從科學號實驗艙內(nèi)部實時控制手臂,或者對其進行預編程以自主執(zhí)行任務。手臂的中間還有一個內(nèi)置的中控計算機,太空行走過程中的航天員可以通過設備輸入指令。機械臂還加裝了腳限位器用來擴展航天員的出艙活動范圍,輔助加成提高太空行走的工作效率。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09