一種饋能型電機供電電源設計
2021-09-23 06:59:48吳洪德陳慶武邵立偉黃德皇
通信電源技術 2021年9期
蘇 潮,吳洪德,陳慶武,邵立偉,黃德皇
(1.中山早稻田科技有限公司,廣東 中山 528400;2.中山市北京理工大學研究院,廣東 中山 528400)
0 引 言
在電機驅動器行業內,尤其是變頻器和伺服驅動器,針對剎車過程直流母線過壓問題,一般的應對方案通常有兩個。一個是通過加泄放電阻消耗掉電能,從而將直流電壓拉下來。此方案明顯的缺點是耗能較大,不利于電能的高效利用。另一個是加大直流母線支撐電容容量,此方案的缺點是電容體積非常大,導致產品整體體積大且成本高。針對此問題,本文介紹了一種饋能型電機供電電源設計方案,此電源的特點是除了能充當普通的直流供電電源外,還能把電機發出來的電能回饋到電網端。設計方案包含主回路拓撲、控制電路以及軟件控制算法[1-6]。
1 電源電路拓撲及工作原理
1.1 電源總拓撲結構
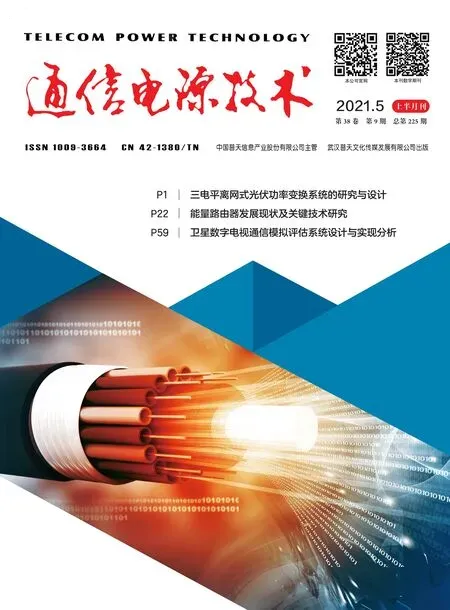
電源總拓撲如圖1所示,系統的一端是單相220 V公共電網,另一端是直流電機,此直流電機可以是直流伺服電機。電源可以實現電能的雙向流動,中間進行電氣隔離。系統由主要由單相并網型AC/DC雙向變換電路和DC/DC雙向變換電路組成。單相并網型 AC/DC 雙向變換電路由 L1、Q1、D1、Q2、D2、Q3、D3、Q4、D4以及C1組成,DC/DC雙向變換電路由Q5、D5、Q6、D6、Q7、D7、Q8、D8、C2、T1、Q9、D9、Q10、D10、L2以及C3組成。電源各個關鍵節點的電壓和電流都由同一個DSP控制器檢測和控制。
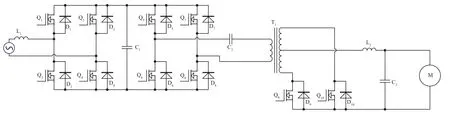
圖1 電源總拓撲結構
1.2 單相并網型AC/DC電路拓撲結構及工作原理
單相并網型AC/DC電路主要是PWM單相全橋整流器,此整流器在電源中起著非常重要的作用,除了要把交流電變成直流電,還需要把直流電變成交流電,尤其是變成并網型的交流電。控制系統的設計如圖2所示,控制對象是直流電壓,給定值Vdc_ref和Vdc_mea對比之后生成偏差Vdc_error信號,偏差信號經過PI運算之后作為給定電流Iref的幅值。給定電流的頻率和相位跟隨輸入電壓,輸入電壓經過鎖相環PLL得到電網端的頻率和相位。
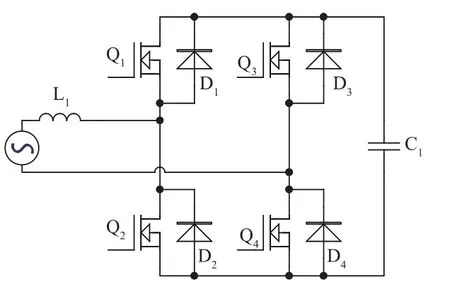
圖2 單相并網型AC/DC電路拓撲結構
PWM整流器的相量方程為:

式中,Us是網側電壓,Uab是PWM整流器輸入電壓,jwLsIs是電感L1兩端電壓。當網側電壓Us保持不變時,交流輸入電流Is的相位和幅值由輸入電壓Uab幅值及其與ULs的相位共同決定。因此,可通過控制交流輸入電流Is與網側電壓Us反相、同相、滯后以及超前的方式實現整流或者逆變工作。
1.3 DC/DC電路拓撲結構及工作原理
如圖3所示,在饋能工作模式即電機處于發電狀態下,整個控制過程是控制器從檢測到C3的電壓升高的時刻T0算起,Q9和Q10同時導通,L2的電流緩慢上升,電感處于儲能狀態。T1時刻Q10截止Q9繼續導通,左側電路Q5和Q8導通,C1緩慢充電,L2電流緩慢減小。T2時刻Q9和Q10同時導通,L2的電流緩慢上升,電感處于儲能狀態。T3時刻Q9截止Q10繼續導通,左側電路Q6和Q7導通,C1緩慢充電,L2電流緩慢減小。在供電工作模式即電機處于耗電狀態下,整個控制過程是控制器從檢測到C3的電壓下降的時刻T0算起,左側電路Q5和Q8同時導通,C1的電壓加到了變壓器的原邊兩端,原邊電流緩慢增加,副邊感應出電流,D9導通,電流流過L2給C3充電,此時為減少D9的損耗可導通Q9,實現同步整流。到T1時刻,Q5和Q8同時截止,原邊電流經過D6進行續流。到T2時刻,Q6和Q7同時導通,C1的電壓反向加到了變壓器的原邊兩端。同理,副邊的D10和Q10導通,給C3進行充電,如此便實現了給電機恒壓供電的功能。
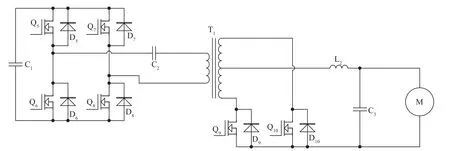
圖3 DC/DC電路拓撲結構
2 電源控制方法
2.1 單相電流控制器
在三相變流器中,UVW三相靜止坐標系變換成α-β兩相靜止坐標系,再變換成d-q旋轉坐標系。然而此變換不能直接用于單相系統中,因為單相系統只有一個電流變量,解決方法是虛構出另一個電流變量,先構建α-β兩相靜止坐標系,再變換成d-q旋轉坐標系。把實際測量到的Is定義為Iα,Iβ作為虛構電流變量,滯后于Iα的相位90°。
坐標變換公式為:

得到測量值Id和Iq之后,分別與給定值進行比較,然后進行PI運行,得到Ud和Uq值,再進行坐標反變換為:

2.2 雙向DC/DC變換器的控制方法
本系統采用推挽型雙向DC/DC變換器,控制策略采用電壓環控制模式。電壓環控制模式是一種基本的控制策略,對電壓值進行采樣,然后與設定值進行比較,再由比較后的差值進行PI運算得到控制信號。控制信號對主回路的開關管進行控制,整個過程構成了閉環控制系統[7-10]。
2.3 控制電路設計
本系統采用DSP作為主控芯片,外圍電路包括電流采樣電路、電壓采樣電路、模擬信號調理電路、保護電路、驅動電路以及電源電路。其中,電流、電壓采樣電路需要用線性光耦進行電氣隔離,相應的供電電源也需要選擇隔離型DC/DC電源。
3 結 論
本文的方案在算法上通過MATLAB仿真得到了驗證,最后通過制作PCB電路板并連接電機進行實際測試,測試的結果表明,電源的各項功能和性能指標均符合產品設計要求。