煤礦無軌膠輪車調(diào)度系統(tǒng)設(shè)計(jì)與應(yīng)用研究
2021-09-23 12:15:58王瑜,康帆
能源與環(huán)保 2021年9期
關(guān)鍵詞:系統(tǒng)
王 瑜,康 帆
(西安航空職業(yè)技術(shù)學(xué)院,陜西 西安 710089)
我國整個(gè)能源結(jié)構(gòu)體系中,煤炭資源發(fā)揮著舉足輕重的作用[1]。根據(jù)相關(guān)統(tǒng)計(jì)數(shù)據(jù)表明,煤炭資源在整個(gè)能源結(jié)構(gòu)體系中所占比例在40%~50%[2]。礦井中開采得到的煤礦物料需通過運(yùn)輸系統(tǒng)輸送到指定位置,無軌膠輪車是煤礦中比較重要的輔助運(yùn)輸系統(tǒng),與有軌運(yùn)輸系統(tǒng)相比較,其運(yùn)輸更加靈活,可以充分結(jié)合煤礦生產(chǎn)實(shí)際情況進(jìn)行靈活調(diào)整[3]。但是當(dāng)?shù)V井中使用的無軌膠輪車數(shù)量達(dá)到一定程度時(shí),會(huì)顯著增加礦井交通的難度。再加上礦井巷道本身比較狹窄,如果調(diào)度不當(dāng)非常容易發(fā)生交通事故[4]。輕則產(chǎn)生交通堵塞,影響煤礦生產(chǎn)過程的連續(xù)性,重則產(chǎn)生嚴(yán)重的人員傷亡事故。針對(duì)該問題,有必要結(jié)合礦井實(shí)際情況,設(shè)計(jì)研究無軌膠輪車的調(diào)度系統(tǒng),對(duì)礦井中運(yùn)行的車輛進(jìn)行有效調(diào)度,避免發(fā)生交通安全事故[5]。本文主要設(shè)計(jì)研究了無軌膠輪車的調(diào)度系統(tǒng),并將該系統(tǒng)應(yīng)用到煤礦生產(chǎn)實(shí)踐中,取得了較好的應(yīng)用效果,值得其他煤礦企業(yè)借鑒。
1 調(diào)度系統(tǒng)的整體方案設(shè)計(jì)
設(shè)計(jì)的煤礦無軌膠輪車調(diào)度系統(tǒng)整體方案如圖1所示。考慮到無軌膠輪車工作時(shí)始終處于移動(dòng)狀態(tài),因此需要基于無線通信技術(shù)對(duì)無軌膠輪車進(jìn)行定位。具體而言,需要在整個(gè)礦井巷道范圍內(nèi)每間隔一定距離設(shè)置檢測節(jié)點(diǎn),在車輛上設(shè)置移動(dòng)節(jié)點(diǎn)。移動(dòng)節(jié)點(diǎn)以一定頻率向外發(fā)射信號(hào),位于巷道中的檢測節(jié)點(diǎn)可以接收信號(hào)。根據(jù)信號(hào)的衰減程度,結(jié)合一定算法可以獲得車輛的準(zhǔn)確定位。另外,為了對(duì)無軌膠輪車運(yùn)行狀態(tài)進(jìn)行檢測,需要利用傳感器對(duì)車輛運(yùn)行速度和油溫進(jìn)行檢測,由檢測節(jié)點(diǎn)將這些數(shù)據(jù)信息向外發(fā)射。為了保障無軌膠輪車在巷道中的運(yùn)行效率,需要在關(guān)鍵位置安裝信號(hào)燈,司機(jī)根據(jù)信號(hào)燈指示行走,遵循紅燈停、綠燈行的原則[6]。控制系統(tǒng)統(tǒng)籌井下所有車輛的運(yùn)行方向、運(yùn)行速度等數(shù)據(jù)信息,對(duì)信號(hào)燈進(jìn)行控制,防止車輛在巷道中相遇發(fā)生碰撞或者影響交通效率。
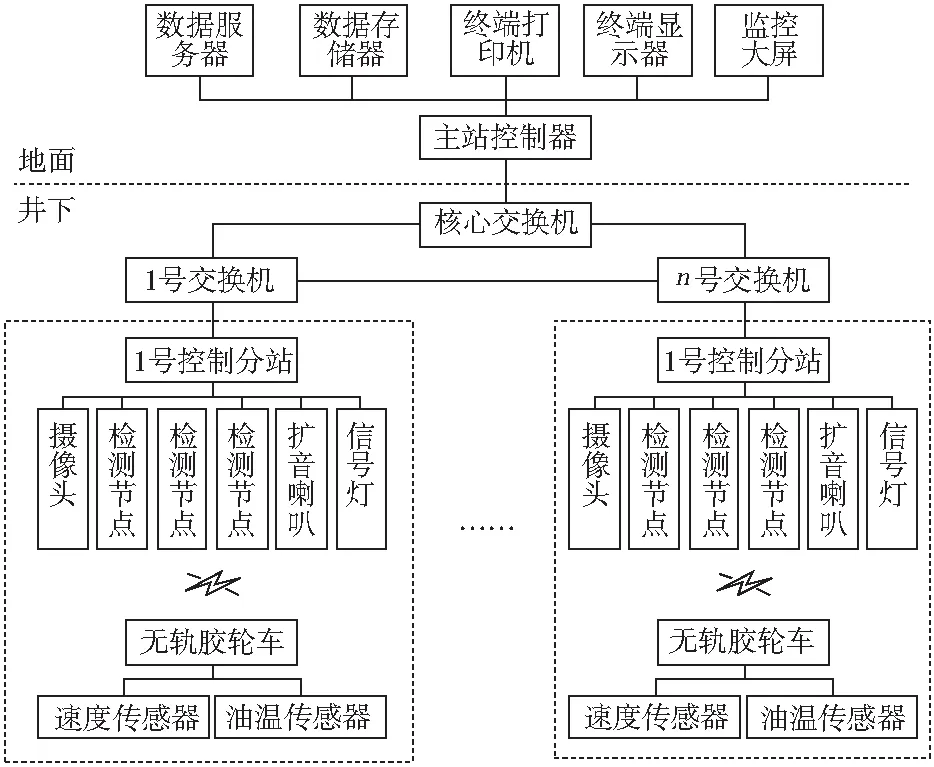
圖1 調(diào)度系統(tǒng)的整體方案Fig.1 Overall scheme of dispatching system
井下采集得到的所有數(shù)據(jù)信息通過工業(yè)以太網(wǎng)絡(luò)傳輸?shù)轿痪喜糠值恼{(diào)度中心,且這些數(shù)據(jù)信息以可視化方式呈現(xiàn)在監(jiān)控大屏上,以便工作人員實(shí)時(shí)掌握井下車輛的狀態(tài)信息,必要時(shí)可通過人工方式對(duì)井下車輛進(jìn)行調(diào)度。所有數(shù)據(jù)信息都要存儲(chǔ)到服務(wù)器中,以便后續(xù)進(jìn)行調(diào)取,需要存儲(chǔ)的信息包括車輛運(yùn)行速度、運(yùn)行方向、上井和下井時(shí)間等。地面調(diào)度中心最重要的功能是結(jié)合車輛運(yùn)行速度和位置信息,對(duì)井下所有的信號(hào)燈進(jìn)行控制,即控制信號(hào)燈的顏色,實(shí)現(xiàn)車輛運(yùn)行的控制。特殊情況下可通過人工方式對(duì)井下的無軌膠輪車進(jìn)行調(diào)度,保障井下車輛和人員的安全。
2 巷道中無軌膠輪車的調(diào)度策略
2.1 調(diào)度基本思路
為了確保無軌膠輪車在煤礦巷道中的行車安全,在巷道中每間隔一定距離設(shè)置1個(gè)避車室。2個(gè)避車室中間的區(qū)間稱為行車區(qū)間。避車室的作用是確保相向行駛的2輛無軌膠輪車能夠安全會(huì)車。每個(gè)行車區(qū)間內(nèi)都設(shè)置有很多檢測節(jié)點(diǎn),以便掌握該區(qū)間內(nèi)車輛的具體位置。為了避免多車輛同時(shí)進(jìn)入同1個(gè)避車區(qū)間或者行車區(qū)間,信號(hào)燈受到調(diào)度系統(tǒng)的控制。巷道行車區(qū)間的設(shè)置如圖2所示。
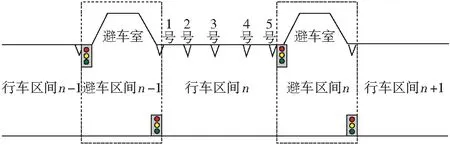
圖2 巷道行車區(qū)間的設(shè)置Fig.2 Setting up laneway driving section
2.2 調(diào)度基本策略
礦井巷道實(shí)際情況非常復(fù)雜,但直行窄巷道是比較特殊的情形。以下主要以該情況為例,闡述巷道中無軌膠輪車的調(diào)度策略。當(dāng)無軌膠輪車A即將進(jìn)入某行車區(qū)間時(shí),根據(jù)行車區(qū)間內(nèi)的實(shí)際情況,可以劃分成為以下4種情形,如圖3所示。
(1)行車區(qū)間內(nèi)無車,如圖3(a)所示。如果行車區(qū)間內(nèi)無車輛行駛,則兩端的信號(hào)燈2和3全部亮綠燈,2個(gè)方向行駛的車輛全部可以直接通過該行車區(qū)間。一旦A車進(jìn)入該行車區(qū)間后,兩端信號(hào)燈立即變成紅色,其他車輛不得駛?cè)搿5?jīng)過延時(shí)ΔT后,A車已經(jīng)行駛一段距離,后側(cè)的信號(hào)燈2變成綠色,車輛可以跟隨A車駛?cè)朐搮^(qū)間。
(2)行車區(qū)間雙向來車,如圖3(b)所示。當(dāng)兩輛無軌膠輪車A、B同時(shí)駛?cè)肽承熊噮^(qū)間兩側(cè)時(shí),調(diào)度系統(tǒng)判斷兩輛車的優(yōu)先級(jí)別。如果A車優(yōu)先級(jí)更高,則信號(hào)燈2變綠,A車進(jìn)入行車區(qū)間,信號(hào)燈3變紅,B車進(jìn)入避車室等待。

圖3 狹窄巷道中會(huì)車的幾種情形Fig.3 Several situations of meeting cars in narrow roadways
(3)行車區(qū)間內(nèi)有同向行駛的車,如圖3(c)所示。如果遇到行車區(qū)間前方存在行駛方向相同的車輛,后方車輛原則上可以直接駛?cè)耄紤]到行車安全,要求兩輛車之間保持一定的安全距離,這就涉及到行車區(qū)間的容量大小問題。調(diào)度系統(tǒng)如果判斷該行車區(qū)間內(nèi)的車輛數(shù)量未達(dá)到最大容量,則在保障前后車輛安全距離的情況下,信號(hào)燈2變綠,A車駛?cè)胄熊噮^(qū)間。相反地,如果調(diào)度系統(tǒng)判斷行車區(qū)間內(nèi)車輛數(shù)量已經(jīng)達(dá)到了飽和狀態(tài),則信號(hào)燈2變紅,A車進(jìn)入避車室等待。
(4)行車區(qū)間內(nèi)有反向行駛的車,如圖3(d)所示。信號(hào)燈2變紅,A車直接進(jìn)入避車室,等待B車通過行車區(qū)間后,信號(hào)燈2變綠,A車從避車室駛出進(jìn)入行車區(qū)間。
巷道中無軌膠輪車的調(diào)度流程如圖4所示。
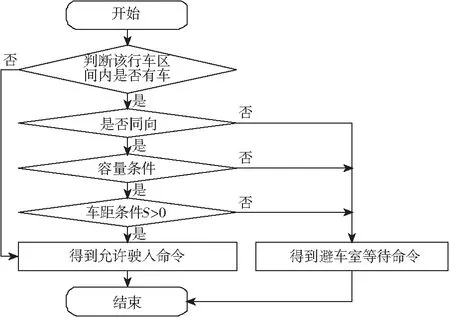
圖4 巷道中無軌膠輪車的調(diào)度流程Fig.4 Dispatching flow chart of trackless rubber-tyred vehicles in roadways
由圖4可知,當(dāng)無軌膠輪車駛?cè)肽承熊噮^(qū)間前,調(diào)度系統(tǒng)會(huì)進(jìn)行一系列的分析、判斷。比如需要分析行車距離內(nèi)是否有車輛行駛,如果有車輛還要判斷車輛行駛方向、行車區(qū)間最大容量、前后車輛之間的安全距離等。只有各方面條件均達(dá)到行車安全的情況下,車輛才能夠駛?cè)胄熊噮^(qū)間,否則進(jìn)入避車室等待。
3 主要硬件選型及軟件設(shè)計(jì)
3.1 主要硬件選型設(shè)計(jì)
由于無軌膠輪車調(diào)度系統(tǒng)是一個(gè)非常復(fù)雜的系統(tǒng),中間涉及很多硬件設(shè)施,本文主要對(duì)一些關(guān)鍵和重要的硬件進(jìn)行介紹。
(1)主站控制器選型。主站控制器位于礦井地面,作用是對(duì)井下所有采集得到的數(shù)據(jù)信息進(jìn)行綜合分析和處理,根據(jù)系統(tǒng)內(nèi)置的算法給出對(duì)應(yīng)的控制策略,并下達(dá)控制指令實(shí)現(xiàn)井下無軌膠輪車的安全調(diào)度。結(jié)合實(shí)際情況,選用610-H/L型控制器[7]。此型號(hào)控制器具有非常豐富的I/O接口,可以與多種其他類型的硬件設(shè)施實(shí)現(xiàn)連接。數(shù)據(jù)交換方式也比較豐富,同時(shí)支持RS485、RS232和工業(yè)以太網(wǎng)的通信模式,完全可以滿足調(diào)度系統(tǒng)的實(shí)際使用需要。
(2)井下分站控制器選型。井下分站控制器的作用是根據(jù)檢測節(jié)點(diǎn)采集得到的信息,對(duì)井下車輛位置進(jìn)行分析判斷,同時(shí)還要與主站控制器進(jìn)行聯(lián)系,實(shí)現(xiàn)數(shù)據(jù)信息的交互,如根據(jù)主站控制器指令對(duì)信號(hào)燈進(jìn)行控制等。選用S7-200型PLC控制器[8]。該型號(hào)控制器具有優(yōu)越的性能,在工業(yè)領(lǐng)域有廣泛應(yīng)用,具有很強(qiáng)的運(yùn)行穩(wěn)定性,可以適應(yīng)復(fù)雜的工作環(huán)境。I/O接口豐富,可以同時(shí)處理不同的任務(wù)。分站控制器供電模塊原理如圖5所示。
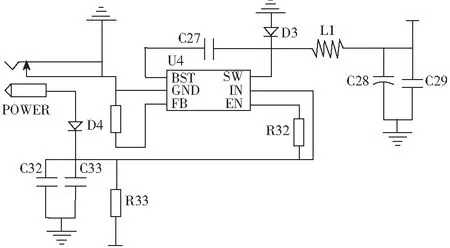
圖5 分站控制器供電模塊原理Fig.5 Schematic diagram of substation controller power supply module
(3)車輛定位模塊選型。主要包含車載節(jié)點(diǎn)和檢測節(jié)點(diǎn)。檢測節(jié)點(diǎn)安裝在礦井巷道不同位置,車載節(jié)點(diǎn)安裝在無軌膠輪車上。由于車輛工作時(shí)始終處于移動(dòng)狀態(tài),因此車載節(jié)點(diǎn)和檢測節(jié)點(diǎn)之間需要通過無線傳輸技術(shù)實(shí)現(xiàn)數(shù)據(jù)傳輸。本調(diào)度系統(tǒng)采用的是ZigBee無線傳輸技術(shù)[9],節(jié)點(diǎn)模塊使用的芯片為CC2530型,該芯片具備有RF收發(fā)器,不僅可以發(fā)送信號(hào),還可以接收信號(hào)。以CC2530芯片為核心,再配合使用其他相關(guān)硬件設(shè)施共同構(gòu)成了檢測節(jié)點(diǎn)和車載節(jié)點(diǎn)。每個(gè)節(jié)點(diǎn)都有固定的ID編號(hào),特別是車載節(jié)點(diǎn)編號(hào)與對(duì)應(yīng)的無軌膠輪車相匹配。車載節(jié)點(diǎn)向外發(fā)送數(shù)據(jù)信息時(shí)同時(shí)會(huì)發(fā)送對(duì)應(yīng)的ID編號(hào)。檢測節(jié)點(diǎn)獲得數(shù)據(jù)信息后,通過分析ID編號(hào)即可判斷數(shù)據(jù)屬于哪輛無軌膠輪車。檢測節(jié)點(diǎn)通過RS485總線通信模式實(shí)現(xiàn)與井下分站之間的聯(lián)系,將采集到的數(shù)據(jù)信息傳輸?shù)椒终局羞M(jìn)行分析。車輛定位模塊內(nèi)部及其與分站之間的通信模式如圖6所示。

圖6 定位模塊內(nèi)部及其與分站之間的通信Fig.6 Communication between positioning module and substation
(4)車輛信息檢測模塊。煤礦井下工作環(huán)境復(fù)雜,為了保障井下無軌膠輪車運(yùn)行過程的安全性,需要對(duì)車輛相關(guān)信息進(jìn)行實(shí)時(shí)檢測,其中最重要的檢測數(shù)據(jù)包括油溫和行進(jìn)速度。如果檢測發(fā)現(xiàn)超過了安全數(shù)值,調(diào)度系統(tǒng)會(huì)立即發(fā)出警報(bào)以提示駕駛員。系統(tǒng)選用柴油機(jī)保護(hù)檢測模塊(YE0.3-24)[10]。該設(shè)備可以在-20~80 ℃正常工作,工作時(shí)的電壓和電流分別為DC 15~30 V、300 mA。溫度監(jiān)測范圍和車速檢測范圍分別為0~160 ℃和0~150 km/h。
3.2 調(diào)度系統(tǒng)軟件設(shè)計(jì)
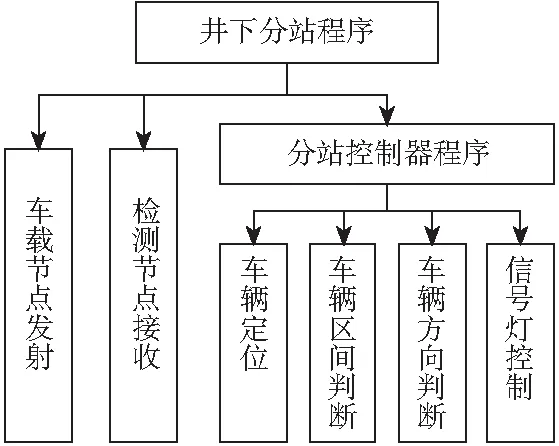
圖7 井下分站軟件基本組成Fig.7 Basic composition of underground station software
車載節(jié)點(diǎn)搭設(shè)在無軌膠輪車上,首先需要利用各種傳感器采集車輛運(yùn)行狀態(tài)數(shù)據(jù)信息,包括油溫和運(yùn)行速度等,然后利用發(fā)射節(jié)點(diǎn)將包括車輛編號(hào)ID在內(nèi)的車輛基本信息通過無線網(wǎng)絡(luò)傳輸?shù)綑z測節(jié)點(diǎn)。檢測節(jié)點(diǎn)接收到相關(guān)信號(hào)后,聯(lián)通信號(hào)的衰減值一同發(fā)送到分站,通過分站傳輸?shù)娇刂破髦羞M(jìn)行處理。分站控制器獲得數(shù)據(jù)信息后,基于內(nèi)置算法對(duì)車輛位置進(jìn)行計(jì)算,同時(shí)判斷車輛的行駛方向、相關(guān)行車區(qū)間的容量是否超標(biāo)等,另外,還需要根據(jù)主站的綜合判斷結(jié)果對(duì)行車區(qū)間兩側(cè)的信號(hào)燈進(jìn)行控制,并將結(jié)果反饋到地面主站。
(2)地面主站軟件設(shè)計(jì)。井下分站和地面主站之間通過工業(yè)以太網(wǎng)實(shí)現(xiàn)數(shù)據(jù)信息交互。地面主站獲得數(shù)據(jù)信息后,首先要對(duì)數(shù)據(jù)進(jìn)行存儲(chǔ),還要對(duì)數(shù)據(jù)進(jìn)行顯示,便于工作人員可以實(shí)時(shí)掌握井下車輛基本情況。更重要的是數(shù)據(jù)信息進(jìn)行處理分析,判斷井下無軌膠輪車的運(yùn)行狀態(tài)并下達(dá)控制指令。實(shí)現(xiàn)車輛調(diào)度的效果。主要包含以下3個(gè)方面軟件程序:①通信程序。井下分站和地面主站之間的距離較長,如何實(shí)現(xiàn)數(shù)據(jù)信息的安全可靠交互是關(guān)鍵問題,是保障調(diào)度系統(tǒng)運(yùn)行的基礎(chǔ),軟件程序就發(fā)揮著重要作用。通信程序工作時(shí),在地面主站分別按照井下分站的網(wǎng)絡(luò)地址進(jìn)行檢測,查看網(wǎng)絡(luò)是否正常連接。如果檢查發(fā)現(xiàn)網(wǎng)絡(luò)連接存在異常,會(huì)在監(jiān)控大屏上顯示故障問題。②車輛信息處理程序。作用是對(duì)井下所有車輛數(shù)據(jù)信息進(jìn)行分析處理,判斷車輛的行駛速度、具體位置等,并結(jié)合每個(gè)行車區(qū)間情況對(duì)井下所有信號(hào)燈進(jìn)行控制,達(dá)到車輛調(diào)度的目的,所有車輛信息以及信號(hào)燈控制情況在監(jiān)控大屏上進(jìn)行顯示。為了保障井下所有無軌膠輪車的數(shù)據(jù)都可以被采集到,需要分析井下車輛的數(shù)量是否與實(shí)際情況相匹配。③人工干預(yù)程序。正常情況下調(diào)度系統(tǒng)可以實(shí)現(xiàn)自動(dòng)化運(yùn)行,但在特殊情況下需要通過人工干預(yù)。其一,為了滿足局部區(qū)域的個(gè)性化生產(chǎn)要求,需要對(duì)相關(guān)區(qū)域車輛調(diào)度進(jìn)行干預(yù);第二,當(dāng)井下出現(xiàn)交通事故時(shí)需要對(duì)相關(guān)區(qū)域信號(hào)燈進(jìn)行人為控制,保障井下安全。如果需要人工干預(yù)時(shí),可以直接在地面主站監(jiān)控大屏上進(jìn)行操作。
4 調(diào)度系統(tǒng)的應(yīng)用
將設(shè)計(jì)的煤礦無軌膠輪車調(diào)度系統(tǒng)應(yīng)用到煤礦生產(chǎn)工程實(shí)踐中,對(duì)其各項(xiàng)功能進(jìn)行了實(shí)踐測試,發(fā)現(xiàn)調(diào)度系統(tǒng)整體運(yùn)行良好,各項(xiàng)功能均達(dá)到了預(yù)期效果。
(1)對(duì)井下所有的無軌膠輪車位置進(jìn)行了準(zhǔn)確定位。為了測量無軌膠輪車的定位精度,在完成調(diào)度系統(tǒng)的部署工作后,開展了實(shí)驗(yàn)工作。調(diào)度系統(tǒng)定位精度實(shí)驗(yàn)統(tǒng)計(jì)結(jié)果如圖8所示。
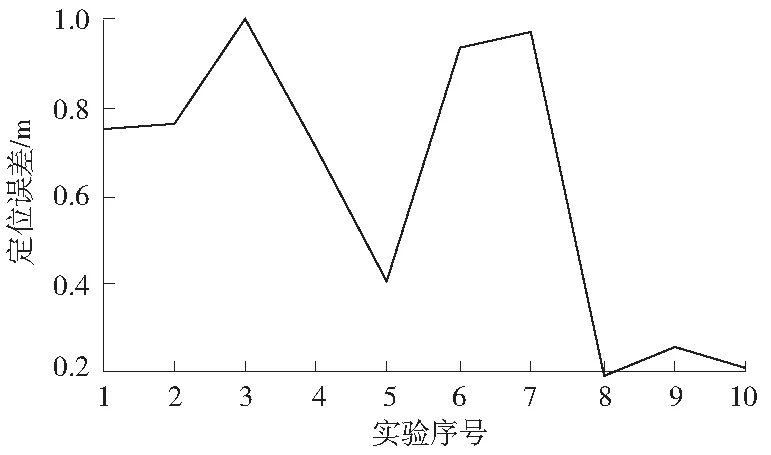
圖8 調(diào)度系統(tǒng)定位精度實(shí)驗(yàn)統(tǒng)計(jì)結(jié)果Fig.8 Statistical results of positioning accuracy experiment of dispatch system
由圖8可知,此次共開展了10次定位誤差的實(shí)驗(yàn)工作,發(fā)現(xiàn)定位誤差控制在了0.2~1.0 m,完全滿足了調(diào)度系統(tǒng)實(shí)際的使用需要。基于精確的井下車輛定位結(jié)果,調(diào)度系統(tǒng)可以對(duì)所有的車輛進(jìn)行安全調(diào)度。在整個(gè)測試期間,發(fā)現(xiàn)調(diào)度系統(tǒng)能夠正確地控制巷道中的信號(hào)燈,車輛根據(jù)信號(hào)燈行駛或者避讓,沒有發(fā)生車輛堵塞或者井下交通安全事故,驗(yàn)證了系統(tǒng)運(yùn)行的可靠性。
(2)車輛行駛軌跡記錄和安全隱患報(bào)警。由于調(diào)度系統(tǒng)可以對(duì)井下所有車輛的位置進(jìn)行獲取,可以實(shí)時(shí)掌握井下所有車輛的行駛軌跡。一旦井下發(fā)生安全事故,可以給后續(xù)應(yīng)急救援工作帶來方便。另外車輛中安裝了速度傳感器和油溫傳感器。如果車輛運(yùn)行速度超過了設(shè)定值,調(diào)度系統(tǒng)會(huì)發(fā)出安全警告,提示駕駛?cè)藛T降低行車速度,保障行車安全。油溫傳感器可對(duì)車輛中使用的各種潤滑油等的溫度進(jìn)行監(jiān)測,如果發(fā)現(xiàn)溫度超過了設(shè)定值也會(huì)發(fā)出警報(bào),提示駕駛?cè)藛T停車檢查。
(3)闖紅燈記錄。在巷道的一些重要節(jié)點(diǎn)位置安裝高清攝像頭,如果無軌膠輪車行駛過程中無視信號(hào)燈隨意行駛,攝像頭可以進(jìn)行取證并傳輸?shù)较到y(tǒng)中。系統(tǒng)檢測發(fā)現(xiàn)車輛存在闖紅燈行為時(shí),對(duì)駕駛?cè)藛T發(fā)出安全警告。
2015年12月21日,稽查科接到線索,得知某舊式居民小區(qū)有制假窩點(diǎn),人員和房屋結(jié)構(gòu)復(fù)雜。考慮到女性執(zhí)法人員不易引起犯罪嫌疑人警惕,黃梅參與了此次蹲守、伏擊行動(dòng),負(fù)責(zé)外圍觀察和發(fā)起行動(dòng)信號(hào)。當(dāng)該居民房門打開的一瞬間,蹲守的執(zhí)法人員立即進(jìn)入,迅速控制一名嫌疑人和現(xiàn)場,并以該窩點(diǎn)為伏擊圈,張網(wǎng)以待。經(jīng)過數(shù)十小時(shí)的蹲守,一一抓獲了其他3名犯罪嫌疑人。嫌疑人企圖用金錢收買辦案人員,被辦案組嚴(yán)詞拒絕。據(jù)悉,該案查獲“痛風(fēng)膠囊”“骨康蝮蛇木瓜膠囊”等成品藥18425盒;查獲了半成品、包裝材料及制假設(shè)備,案值50余萬元。由黃梅承辦的該案被移送司法部門,法院對(duì)4名罪犯進(jìn)行了判決。
綜上所述,通過對(duì)調(diào)度系統(tǒng)的應(yīng)用測試,發(fā)現(xiàn)調(diào)度系統(tǒng)各項(xiàng)功能均達(dá)到了預(yù)期效果,可以安全可靠地對(duì)井下所有的無軌膠輪車進(jìn)行調(diào)度。上述措施有效保障了井下的行車安全,為煤礦企業(yè)創(chuàng)造了良好的經(jīng)濟(jì)效益和安全效益。
5 結(jié)論
主要以煤礦中使用的無軌膠輪車為研究對(duì)象,設(shè)計(jì)了車輛調(diào)度系統(tǒng),并將其應(yīng)用到煤礦生產(chǎn)實(shí)踐中,取得了較好的效果。
(1)設(shè)計(jì)的調(diào)度系統(tǒng)共劃分為地面主站和井下分站部分。分站作用是對(duì)區(qū)域內(nèi)的車輛位置及行駛方向等信息進(jìn)行采集,所有分站的數(shù)據(jù)全部通過工業(yè)以太網(wǎng)傳輸?shù)降孛嬷髡局羞M(jìn)行綜合分析,并下達(dá)調(diào)度指令,控制各行車區(qū)間的信號(hào)燈。
(2)地面主站和井下分站采用的控制器型號(hào)分別為610-H/L和PLC-200,均具有良好的性能,完全能夠滿足調(diào)度系統(tǒng)的實(shí)際使用需要。車載節(jié)點(diǎn)和檢測節(jié)點(diǎn)之間通過ZigBee無線技術(shù)實(shí)現(xiàn)數(shù)據(jù)信息的傳輸。
(3)將設(shè)計(jì)的調(diào)度系統(tǒng)應(yīng)用到實(shí)踐中,對(duì)其定位精度開展了實(shí)驗(yàn)工作,發(fā)現(xiàn)均控制在了1 m范圍以內(nèi)。同時(shí)對(duì)其他各項(xiàng)功能進(jìn)行測試發(fā)現(xiàn)均達(dá)到了預(yù)期效果,系統(tǒng)整體運(yùn)行穩(wěn)定,創(chuàng)造了良好的經(jīng)濟(jì)效益和安全效益。
參考文獻(xiàn)(References):
[1] 王瑞,高進(jìn),王永旺,等.淺述煤炭綜合利用的應(yīng)用前景[J].化工管理,2017(35):25-27.
Wang Rui,Gao Jin,Wang Yongwang,et al.The application prospect of comprehensive utilization of coal[J].Chemical Enterprise Management,2017(35):25-27.
[2] 鄭德志,任世華.我國煤礦安全生產(chǎn)發(fā)展歷程及演進(jìn)趨勢[J].能源與環(huán)保,2019,41(11):1-6.
Zheng Dezhi,Ren Shihua.Development history and evolution trend of coal mine safety production in China[J].China Energy and Environmental Protection,2019,41(11):1-6.
[3] 李利文.礦井下無軌膠輪車的現(xiàn)狀及應(yīng)用研究[J].能源與環(huán)保,2019,41(3):143-146.
Li Liwen.Research on status quo and application of trackless rubber tire under mine[J].China Energy and Environmental Protection,2019,41(3):143-146.
[4] 賈艷陽.礦用無軌膠輪車精確定位系統(tǒng)設(shè)計(jì)[J].機(jī)械管理開發(fā),2020,35(10):67-68,80.
Jia Yanyang.Design of precision positioning system for mine trackless rubber wheel car[J].Mechanical Management and Development,2020,35(10):67-68,80.
[5] 黃玉龍.礦井無軌膠輪車運(yùn)輸若干問題[J].當(dāng)代化工研究,2019(7):20-21.
Huang Yulong.Some problems of trackless rubber-tyred vehicle transportation in mines[J].Modern Chemical Research,2019(7):20-21.
[6] 李峰.礦井無軌膠輪車調(diào)度監(jiān)控系統(tǒng)的設(shè)計(jì)[J].機(jī)電工程技術(shù),2019,48(4):143-145.
Li Feng.Design of mine trackless rubber wheel dispatching monitoring system[J].Mechanical & Electrical Engineering Technology,2019,48(4):143-145.
[7] 楊鵬.礦用支架試驗(yàn)臺(tái)液壓系統(tǒng)計(jì)算機(jī)控制[D].太原:太原科技大學(xué),2009.
[8] 趙晉紅.基于PLC的膠帶輸送機(jī)保護(hù)系統(tǒng)研究[J].能源與環(huán)保,2020,42(5):102-104,108.
Zhao Jinhong.Research on protection system of belt conveyor based on PLC[J].China Energy and Environmental Protection,2020,42(5):102-104,108.
[9] 胡亮.基于超寬帶和慣導(dǎo)的井下人員定位系統(tǒng)研究與設(shè)計(jì)[J].能源與環(huán)保,2019,41(11):94-98.
Hu Liang.Research and design on personnel location system of underground based on UWB and inertial navigation[J].China Energy and Environmental Protection,2019,41(11):94-98.
[10] 高姍.防爆柴油機(jī)自動(dòng)保護(hù)裝置檢測系統(tǒng)設(shè)計(jì)與研究[J].煤炭與化工,2020,43(6):80-81,84.
Gao Shan.Design and research of automatic protection device testing system for explosion-proof diesel engines[J].Coal and Chemical Industry,2020,43(6):80-81,84.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32