邊緣設(shè)備上的葡萄園田間場(chǎng)景障礙檢測(cè)*
2021-09-23 14:19:48崔學(xué)智馮全王書(shū)志張建華
中國(guó)農(nóng)機(jī)化學(xué)報(bào) 2021年9期
崔學(xué)智,馮全,王書(shū)志,張建華
(1. 甘肅農(nóng)業(yè)大學(xué)機(jī)電工程學(xué)院,蘭州市,730070; 2. 西北民族大學(xué)機(jī)電工程學(xué)院,蘭州市,730030;3. 中國(guó)農(nóng)業(yè)科學(xué)院農(nóng)業(yè)信息研究所,北京市,100081)
0 引言
目前在農(nóng)用無(wú)人駕駛方面,較為成熟的路徑規(guī)劃和避障方案是使用衛(wèi)星導(dǎo)航[1]配合毫米波雷達(dá)[2],但這種方式對(duì)環(huán)境的感知水平較低,無(wú)法準(zhǔn)確識(shí)別障礙物類(lèi)型,只能在障礙物較少、信號(hào)良好的區(qū)域使用。相比于城市場(chǎng)景,農(nóng)業(yè)田間場(chǎng)景障礙物體積相對(duì)較小,多數(shù)為柔性且位置固定(或移動(dòng)緩慢)。探索快速、準(zhǔn)確、經(jīng)濟(jì)的田間障礙物檢測(cè)技術(shù),可以推動(dòng)無(wú)人駕駛農(nóng)機(jī)發(fā)展,提升農(nóng)業(yè)機(jī)械自動(dòng)化和智能水平。
為解決田間障礙檢測(cè)問(wèn)題,很多學(xué)者采用計(jì)算機(jī)視覺(jué)技術(shù)進(jìn)行了探索[3-4],傳統(tǒng)方法處理速度快,但難以勝任復(fù)雜場(chǎng)景的高精度障礙檢測(cè)。近年來(lái)隨著深度學(xué)習(xí)技術(shù)興起,涌現(xiàn)出許多優(yōu)秀的深度卷積神經(jīng)網(wǎng)絡(luò)[5-8],它們?cè)趫D像識(shí)別方面取得了良好效果,將這些網(wǎng)絡(luò)作為主干網(wǎng)絡(luò),研究者們?cè)O(shè)計(jì)了專(zhuān)用于目標(biāo)檢測(cè)的網(wǎng)絡(luò)模型[9-11],其特征提取快,分類(lèi)回歸更為準(zhǔn)確,逐漸成為目標(biāo)檢測(cè)的主流。一些學(xué)者開(kāi)始在農(nóng)業(yè)田間場(chǎng)景檢測(cè)方面使用深度學(xué)習(xí)方法。李云伍等[12]將丘陵山區(qū)田間場(chǎng)景障礙物分11類(lèi),構(gòu)建了基于空洞卷積神經(jīng)網(wǎng)絡(luò)的田間道路場(chǎng)景圖像語(yǔ)義分割模型,該模型包括前端模塊和上下文模塊,前端模塊為VGG-16融合空洞卷積的改進(jìn)結(jié)構(gòu),上下文模塊為不同膨脹系數(shù)空洞卷積層的級(jí)聯(lián),采用兩階段訓(xùn)練方法進(jìn)行訓(xùn)練。劉慧等[13]針對(duì)果園環(huán)境復(fù)雜難以準(zhǔn)確檢測(cè)出障礙物信息的問(wèn)題,提出了一種改進(jìn)SSD的深度學(xué)習(xí)目標(biāo)檢測(cè)方法,使用輕量化網(wǎng)絡(luò)MobileNetV2作為SSD模型中的基礎(chǔ)網(wǎng)絡(luò),以減少提取圖像特征過(guò)程中所花費(fèi)的時(shí)間及運(yùn)算量,輔助網(wǎng)絡(luò)層以反向殘差結(jié)構(gòu)結(jié)合空洞卷積作為基礎(chǔ)結(jié)構(gòu)對(duì)行人進(jìn)行位置預(yù)測(cè),在果園行人實(shí)時(shí)檢測(cè)上取得了較好效果。
普通目標(biāo)檢測(cè)神經(jīng)網(wǎng)絡(luò)可以實(shí)現(xiàn)高精度目標(biāo)檢測(cè),其缺點(diǎn)是運(yùn)行消耗計(jì)算資源大,需要臺(tái)式服務(wù)器,但由于智能農(nóng)機(jī)內(nèi)空間有限,服務(wù)器在其上部署困難,且田間道路顛簸,會(huì)導(dǎo)致其工作可靠性降低。為解決以上問(wèn)題,需使用輕量級(jí)神經(jīng)網(wǎng)絡(luò)模型和堅(jiān)固的邊緣設(shè)備。輕量級(jí)神經(jīng)網(wǎng)絡(luò)模型雖然檢測(cè)精度相對(duì)一般,但消耗計(jì)算資源較少。邊緣設(shè)備雖然計(jì)算能力較弱,但體積較小,部署方便,在顛簸場(chǎng)景運(yùn)行相對(duì)穩(wěn)定,且價(jià)格較低。因此在邊緣設(shè)備上使用輕量級(jí)目標(biāo)檢測(cè)模型實(shí)現(xiàn)實(shí)時(shí)障礙檢測(cè)功能對(duì)于實(shí)用的、廉價(jià)的無(wú)人駕駛農(nóng)機(jī)具有重要意義。
本文選擇常用的邊緣設(shè)備N(xiāo)VIDIA JETSON TX2作為葡萄園田間場(chǎng)景障礙物快速檢測(cè)算法的硬件運(yùn)行平臺(tái),使用YOLOV3-TINY、YOLOV4-TINY、EfficientDet-D0、YOLO-FASTEST4種輕量級(jí)神經(jīng)網(wǎng)絡(luò)在以葡萄園作為背景的自建田間場(chǎng)景數(shù)據(jù)集進(jìn)行訓(xùn)練,再將得到的4種網(wǎng)絡(luò)模型移植到TX2上,通過(guò)試驗(yàn)比較這幾種目標(biāo)檢測(cè)網(wǎng)絡(luò)的障礙檢測(cè)精度以及在TX2上的運(yùn)行幀率、計(jì)算資源占用等項(xiàng)目,采用加權(quán)評(píng)分制對(duì)4種網(wǎng)絡(luò)在TX2上的綜合表現(xiàn)進(jìn)行打分,優(yōu)選出最適合移植到TX2上的目標(biāo)檢測(cè)網(wǎng)絡(luò)。
1 4種輕量級(jí)目標(biāo)檢測(cè)模型介紹
1.1EfficientDet-D0
EfficientDet[14]是Google Brain于2019年11月發(fā)布的目標(biāo)檢測(cè)網(wǎng)絡(luò)。其多尺度特征融合網(wǎng)絡(luò)采用了加權(quán)雙向特征金字塔網(wǎng)絡(luò)(BIFPN)進(jìn)行多尺度特征融合,通過(guò)自上而下以及自下而上的、跨尺度的對(duì)不同尺度的特征進(jìn)行加權(quán)融合,BIFPN采用深度分離卷積進(jìn)行特征融合,并在每次卷積后加入批量歸一化和激活,從而實(shí)現(xiàn)高效的聚合不同分辨率的特征。
本文所使用的EfficientDet-D0模型是EfficientDet所提供的預(yù)訓(xùn)練模型中的輕量級(jí)模型,大小僅15.1 MB,非常適合遷移到邊緣設(shè)備上運(yùn)行,其總體結(jié)構(gòu)由EfficientNet-B0的3層64通道的BIFPN以及3層的類(lèi)別預(yù)測(cè)/目標(biāo)檢測(cè)層(CONV層)組成,其中EfficientNet-B0由1個(gè)輸出通道數(shù)為32、卷積核尺寸為3×3,步進(jìn)為2的卷積層和16個(gè)MBConv運(yùn)算塊組成。
EfficientDet采用的損失函數(shù)分為兩種,一種是分類(lèi)損失函數(shù),另一種是回歸損失函數(shù)。其中分類(lèi)損失函數(shù)采用focal loss損失函數(shù),用來(lái)控制正負(fù)樣本的權(quán)重以及控制容易分類(lèi)和難分類(lèi)樣本的權(quán)重;回歸損失函數(shù)采用SmoothL1 loss損失函數(shù)。
1.2YOLOV3-TINY
YOLOV3[15]系列是2018年最熱門(mén)的目標(biāo)檢測(cè)網(wǎng)絡(luò)之一,而YOLOV3-TINY是YOLOV3的簡(jiǎn)化版,其模型體積為33.7 MB。YOLOV3-TINY主干網(wǎng)絡(luò)在YOLOV3的基礎(chǔ)上進(jìn)行了刪減,去掉了一些特征層,采用了7層2維卷積層輔以6層最大池化層網(wǎng)絡(luò)提取特征。多尺度特征融合方面,YOLOV3-TINY使用了FPN多尺度特征融合網(wǎng)絡(luò),提升了對(duì)于細(xì)小目標(biāo)的檢測(cè)能力。連接網(wǎng)絡(luò)方面,YOLOV3-TINY采用了13×13、26×26組成分辨率探測(cè)網(wǎng)絡(luò)。
1.3YOLOV4-TINY
YOLOV4系列目標(biāo)檢測(cè)網(wǎng)絡(luò)是Bochkovskiy等[16]于2020年4月提出的目標(biāo)檢測(cè)網(wǎng)絡(luò)系列,其中YOLOV4-TINY是YOLOV4的輕量級(jí)模型,其模型大小僅23.1 MB。YOLOV4-TINY為簡(jiǎn)化運(yùn)算,減少模型大小以及提高運(yùn)行速度,僅使用FPN進(jìn)行特征融合,并在損失函數(shù)中做了改進(jìn),使用了CIOU作為回歸損失函數(shù)。
在主干網(wǎng)絡(luò)方面,YOLOV4-TINY使用CSPDarknet53-TINY主干網(wǎng)絡(luò),總體結(jié)構(gòu)可以大致分為2個(gè)部分,主干網(wǎng)絡(luò)、多尺度特征融合網(wǎng)絡(luò)。主干網(wǎng)絡(luò)首先是通過(guò)2個(gè)特征提取層(包含2維卷積、批量歸一化、Leak ReLU激活)對(duì)圖片特征進(jìn)行初步提取,然后3次使用CSP模塊加MAX POOLING層所組成的結(jié)構(gòu)塊進(jìn)行進(jìn)一步特征提取。多尺度特征融合使用了若干卷積層和一組FPN,YOLOV4-TINY僅使用了兩個(gè)特征層(YOLO層)進(jìn)行分類(lèi)與回歸預(yù)測(cè)。
1.4YOLO-FASTEST
YOLO-FASTEST是2020年9月提出的超輕量級(jí)YOLO網(wǎng)絡(luò)模型。它在YOLOV4-TINY網(wǎng)絡(luò)模型的基礎(chǔ)上以降低檢測(cè)精度為代價(jià),進(jìn)一步減少其模型體積,其尺寸僅為1.3 MB,是目前最小的YOLO模型,方便移植到各類(lèi)平臺(tái),但是模型網(wǎng)絡(luò)結(jié)構(gòu)較為復(fù)雜,共126層。
2 材料與方法
2.1 試驗(yàn)平臺(tái)和試驗(yàn)參數(shù)設(shè)置
2.1.1 訓(xùn)練平臺(tái)及訓(xùn)練參數(shù)
本試驗(yàn)的訓(xùn)練平臺(tái)其搭載了Intel?CORETMi5-8400六核處理器,基礎(chǔ)頻率2.80 GHz,最大睿頻4.00 GHz,GPU采用了NVIDIA RTX 2060 6 GB,基礎(chǔ)頻率1 210 MHz,最大頻率1 435 MHz,內(nèi)存為Samsung DDR4@2 666 MHz 8 GB×2。軟件環(huán)境為Windows 10 1909 64 bit家庭版操作系統(tǒng),GPU驅(qū)動(dòng)程序版本為452.06、CUDA Toolkit 10.2。表1為4種網(wǎng)絡(luò)模型的實(shí)現(xiàn)方式。
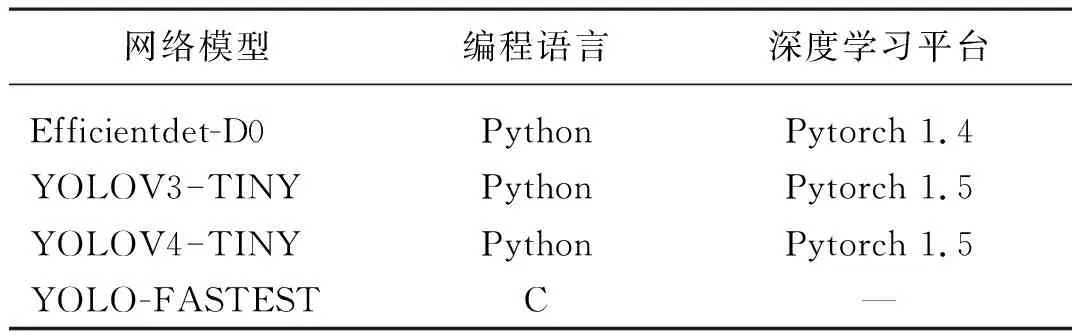
表1 4種網(wǎng)絡(luò)模型的實(shí)現(xiàn)方式Tab. 1 Achievement method of four networks
其中,EfficientDet-D0、YOLOV3-TINY、YOLOV4-TINY的訓(xùn)練參數(shù)一致:學(xué)習(xí)率0.001,迭代次數(shù)為2 000,采用批量訓(xùn)練的方法,將訓(xùn)練集以及測(cè)試集分為32個(gè)批次進(jìn)行,既batch-size為32,將數(shù)據(jù)集設(shè)置為640×640的統(tǒng)一分辨率進(jìn)行訓(xùn)練和測(cè)試。
YOLO-FASTEST使用官方原版YOLOV4主程序,僅權(quán)重文件、配置文件不同,訓(xùn)練參數(shù)設(shè)置:迭代次數(shù)18 000(2 000×類(lèi)別數(shù)9),其余參數(shù)與其他3種網(wǎng)絡(luò)模型一致。
2.1.2 邊緣設(shè)備測(cè)試平臺(tái)
障礙檢查網(wǎng)絡(luò)訓(xùn)練好后會(huì)被移植到邊緣設(shè)備上進(jìn)行實(shí)際障礙檢測(cè)測(cè)試。本試驗(yàn)中的邊緣設(shè)備平臺(tái)為NVIDIA公司的NVIDIA JETSON TX2(以下簡(jiǎn)稱(chēng)TX2)。其搭載了由HMP Dual Denver 2雙核處理器以及Quad ARM@A57四核處理器所組成的六核處理器,最高頻率2.00 GHz,GPU采用了NVIDIAPascal架構(gòu)芯片NVIDIA Tegra X2,擁有256個(gè)CUDA計(jì)算核心,GPU最高頻率1 300 MHz,內(nèi)存為L(zhǎng)PDDR4 8 GB,該邊緣設(shè)備擁有板載CSI攝像頭。軟件環(huán)境Ubuntu18.04、python3編程語(yǔ)言、C編程語(yǔ)言、Pytorch深度學(xué)習(xí)框架、CUDA Toolkit 10.0、CUDNN 7.5.0。
2.2 試驗(yàn)數(shù)據(jù)采集
田間場(chǎng)景圖像的采集是在甘肅省葡萄酒產(chǎn)業(yè)技術(shù)研發(fā)中心的葡萄園中完成,地點(diǎn)是甘肅省蘭州市安寧區(qū)甘肅農(nóng)業(yè)大學(xué)校內(nèi)。使用了搭載Intel REALSENSE D415攝像頭的上海一坤Bulldog無(wú)人車(chē)進(jìn)行了葡萄園田間數(shù)據(jù)采集,對(duì)葡萄園內(nèi)數(shù)條田埂周?chē)h(huán)境分時(shí)段(上午、中午、傍晚)、分天氣(晴天、陰天、雨天)、光照(無(wú)陰影、少量陰影遮蔽、大量陰影遮蔽、順光、逆光)、并以不同分辨率(640×480、1 280×780、1 920×1 080)進(jìn)行了圖像、視頻采集。之后將視頻文件進(jìn)行了圖像拆分,拆分幀率為10張/s,剔除冗余重復(fù)圖片,最終得到了無(wú)人車(chē)視角的4 400張?zhí)镩g場(chǎng)景圖片,包含9種障礙物,保證了數(shù)據(jù)集的豐富性。
2.3 試驗(yàn)數(shù)據(jù)集制作
將采集到的上述4 400張圖片數(shù)據(jù)集使用labelme標(biāo)注軟件對(duì)田間常見(jiàn)障礙進(jìn)行標(biāo)注,共分為9類(lèi):people(人)、fence(柵欄)、trellis(葡萄架)、stone(石塊)、root(根莖)、hole(坑洞)、dog(狗)、stair(臺(tái)階)、barrel(水桶)。考慮到數(shù)據(jù)集制作圖片隨機(jī)選取的原則、將所有圖片按拍攝時(shí)間分為10組,按照4∶1原則分別從這10組圖片中進(jìn)行隨機(jī)選取,其中80%的圖片設(shè)置成訓(xùn)練集、剩余20%為測(cè)試集。共得到訓(xùn)練集3 520張,測(cè)試集880張。
2.4 障礙檢測(cè)精度評(píng)價(jià)指標(biāo)
本文使用均值平均精度(mean Average Precision,mAP)來(lái)衡量網(wǎng)絡(luò)模型精度的好壞,其計(jì)算式
(1)
式中:N——類(lèi)別數(shù),在本試驗(yàn)中為9;
AP——單個(gè)類(lèi)別平均精度。
AP按照COCO競(jìng)賽方式計(jì)算
(2)
其中Ri與Pi為P-R曲線(xiàn)上的取值點(diǎn),i∈{0,0.01,0.02…0.99,1.00}共計(jì)101個(gè)值,COCO的AP計(jì)算方式會(huì)取多個(gè)交并比(Intersection Over Union,IOU)值進(jìn)行計(jì)算,本試驗(yàn)的AP僅取IOU=50%的結(jié)果。
以單個(gè)類(lèi)別召回率為橫軸,單個(gè)類(lèi)別識(shí)別精度為縱軸,即可繪制P-R曲線(xiàn)。P-R曲線(xiàn)的P為單個(gè)類(lèi)別識(shí)別精度(Precision),其計(jì)算式
(3)
式中:TP——分類(lèi)器認(rèn)為是正樣本,并且符合實(shí)際情況;
FP——分類(lèi)器認(rèn)為是正樣本,但實(shí)際是負(fù)樣本。
P-R曲線(xiàn)的R為單個(gè)類(lèi)別召回率(Recall),其計(jì)算式
(4)
式中:FN——分類(lèi)器認(rèn)為是負(fù)樣本,但是實(shí)際是正樣本。
2.5 邊緣設(shè)備上的視頻檢測(cè)性能評(píng)價(jià)
本試驗(yàn)為T(mén)X2實(shí)時(shí)視頻的障礙檢測(cè)試驗(yàn),TX2開(kāi)啟最大性能模式(MAXN模式),關(guān)閉所有無(wú)關(guān)終端窗口,確保每次測(cè)試僅開(kāi)啟一種網(wǎng)絡(luò)模型檢測(cè)程序以及jetson-stats系統(tǒng)資源監(jiān)測(cè)程序。
實(shí)時(shí)視頻檢測(cè)的目的是為了評(píng)價(jià)不同障礙檢測(cè)網(wǎng)絡(luò)模型在TX2上的運(yùn)行性能,優(yōu)選適合在TX2進(jìn)行實(shí)時(shí)目標(biāo)檢測(cè)的網(wǎng)絡(luò)模型。由于運(yùn)行目標(biāo)檢測(cè)模塊會(huì)占用不小的系統(tǒng)資源,可能會(huì)影響整個(gè)檢測(cè)系統(tǒng)的其他功能模塊運(yùn)行(如距離檢測(cè)、避障等),所以除了檢測(cè)精度和幀率外,有必要結(jié)合各模型對(duì)硬件資源占用情況綜合分析其性能。本文采用打分制來(lái)評(píng)價(jià)網(wǎng)絡(luò)模型的綜合表現(xiàn),其計(jì)算公式
(5)
式中:ST——總得分;
s1、s2、s3——mAP項(xiàng)得分、平均幀率項(xiàng)得分、資源占用得分;
w1、w2、w3——上述3項(xiàng)得分的加權(quán)系數(shù),其和為1。
考察資源占用得分時(shí)從以下3個(gè)子項(xiàng)給出其分值:GPU使用情況、CPU使用情況以及RAM使用情況。
根據(jù)經(jīng)驗(yàn),在田間場(chǎng)景障礙實(shí)時(shí)檢測(cè)中,檢測(cè)流暢性最為重要,障礙物檢測(cè)精度次之,硬件資源消耗情況再次之。因此本文根據(jù)重要程度對(duì)所有檢測(cè)項(xiàng)加權(quán)系數(shù)做出如下賦值:w1為0.4,w2為0.5,w3為0.1。
所有測(cè)試項(xiàng)目的評(píng)分以設(shè)置標(biāo)準(zhǔn)為最高得分(5分),每下降標(biāo)準(zhǔn)的20%,得分降低1分,測(cè)試項(xiàng)目評(píng)價(jià)標(biāo)準(zhǔn)如表2所示。
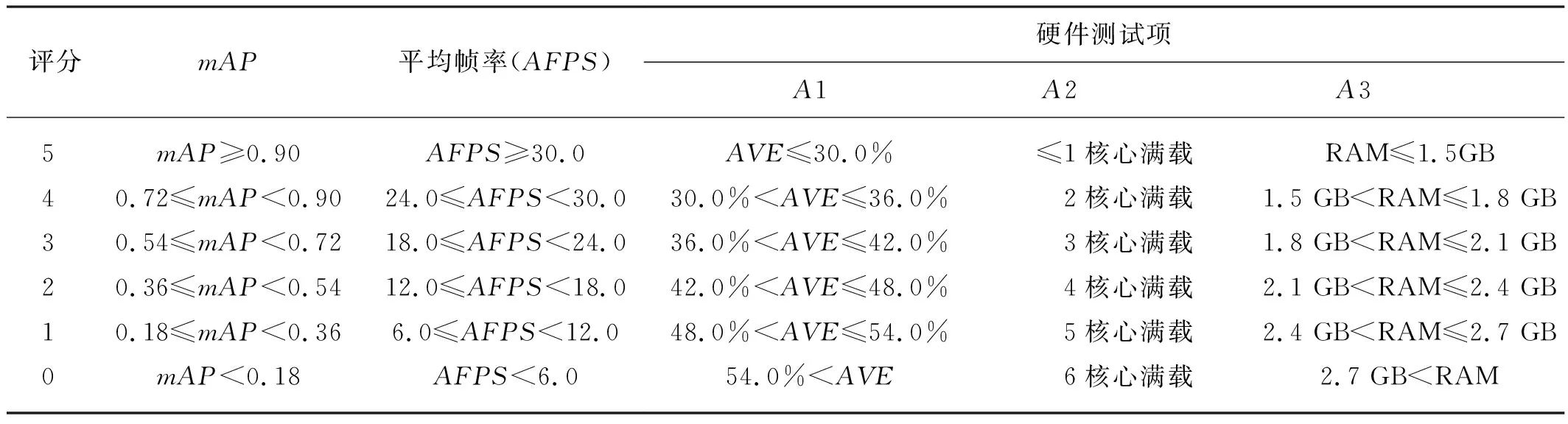
表2 測(cè)試項(xiàng)目評(píng)價(jià)標(biāo)準(zhǔn)Tab. 2 Rating criteria of test items
3 結(jié)果與分析
3.1 障礙檢測(cè)結(jié)果與分析
圖1(a)給出了EfficientDet-D0、YOLOV4-TINY和YOLOV3-TINY的訓(xùn)練損失曲線(xiàn),YOLO-FASTEST迭代次數(shù)與上述三種網(wǎng)絡(luò)相差較大,其訓(xùn)練損失曲線(xiàn)如圖1(b)所示。EfficientDet-D0損失曲線(xiàn)收斂最為迅速,且最終損失值比其他兩種網(wǎng)絡(luò)模型小2.0左右。YOLOV4-TINY、YOLOV3-TINY總體誤差曲線(xiàn)十分相似,其曲線(xiàn)趨勢(shì)幾乎一致,YOLOV3-TINY曲線(xiàn)略?xún)?yōu)于YOLOV4-TINY,差距在0.2以?xún)?nèi)。對(duì)比圖1(a)與圖1(b)可以得知,YOLO-FASTEST總體損失曲線(xiàn)無(wú)論從曲線(xiàn)穩(wěn)定性上還是最終值上都遜色于其他3種網(wǎng)絡(luò)。YOLO-FASTEST總體損失曲線(xiàn)波動(dòng)較大,其最終損失值大于2.5。
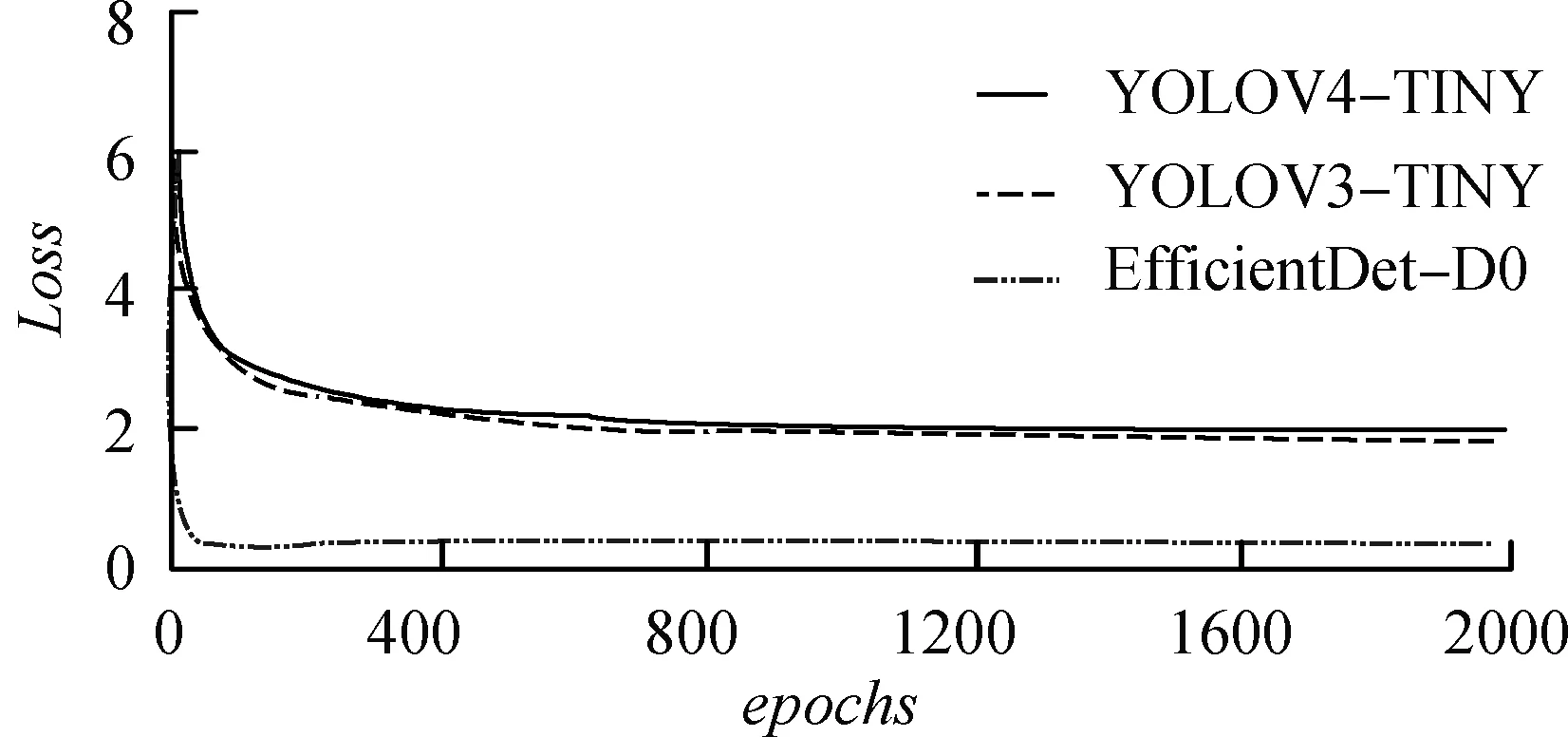
(a) EfficientDet-D0、YOLOV3-TINY、YOLOV4-TINY
圖2為4種網(wǎng)絡(luò)模型在測(cè)試集上的mAP以及各子類(lèi)的AP。EfficientDet-D0、YOLOV4-TINY、YOLOV3-TINY和YOLO-FASTEST三種網(wǎng)絡(luò)模型的mAP分別為0.598、0.601、0.648和0.401,YOLOV3-TINY的mAP值最高。而YOLO-FASTEST網(wǎng)絡(luò)模型的mAP最低。
從圖2可以看出,在4種網(wǎng)絡(luò)模型對(duì)于各子類(lèi)AP值測(cè)試中,EfficientDet-D0網(wǎng)絡(luò)模型在“hole(0.93)”“people(0.923)”“root(0.727)”“barrel(0.534)”“fence(0.742)”等五類(lèi)障礙上的AP值測(cè)試處于第一位,對(duì)“stair(0.079)”類(lèi)障礙的AP值測(cè)試處于第4位。YOLOV3-TINY網(wǎng)絡(luò)模型對(duì)于“trellis(0.597)”“stair(0.316)”“stone(0.627)”“dog(0.785)”四類(lèi)障礙的AP值測(cè)試處于第1位,對(duì)于“fence(0.582)”類(lèi)障礙的AP值測(cè)試處于第4位。
YOLOV4-TINY網(wǎng)絡(luò)模型對(duì)于“hole(0.818)”“people(0.809)”三類(lèi)障礙的AP值測(cè)試處于第4位。YOLO-FASTEST對(duì)于“trellis(0.271)”“root(0.398)”“barrel(0.049)”“stone(0.224)”“dog(0.000 2)”五類(lèi)障礙處于第4位。

圖2 4種網(wǎng)絡(luò)模型最終模型測(cè)試柱狀圖
在這4種網(wǎng)絡(luò)模型中,EfficientDet-D0網(wǎng)絡(luò)模型對(duì)于自建數(shù)據(jù)集內(nèi)五類(lèi)障礙檢測(cè)平均精度在4種網(wǎng)絡(luò)中最高,但對(duì)細(xì)小障礙的檢測(cè)平均精度可能較差;YOLOV3-TINY網(wǎng)絡(luò)模型對(duì)于自建數(shù)據(jù)集內(nèi)的障礙檢測(cè)平均精度在4種網(wǎng)絡(luò)中處于第2位,其四類(lèi)障礙檢測(cè)平均精度在4種網(wǎng)絡(luò)中最高,且沒(méi)有精度低(AP<0.1)的明顯短板;YOLOV4-TINY網(wǎng)絡(luò)對(duì)于自建數(shù)據(jù)集內(nèi)障礙的平均檢測(cè)精度比較中庸,但其各子類(lèi)的AP與最好模型的AP相差不大;YOLO-FASTEST網(wǎng)絡(luò)模型除了對(duì)于自建數(shù)據(jù)集內(nèi)“hole”“people”“fence”的AP尚可外,其他類(lèi)AP均較低。
總體而言,對(duì)于自建數(shù)據(jù)集內(nèi)紋理清晰、畫(huà)質(zhì)較好的兩類(lèi)“hole”“people”而言,4種網(wǎng)絡(luò)模型平均檢測(cè)精度均在80%以上,處于較好水平。對(duì)于畫(huà)質(zhì)模糊,背景復(fù)雜的“stair”類(lèi)而言,4種網(wǎng)絡(luò)檢測(cè)平均精度均較差。對(duì)于其他類(lèi)別障礙而言,4種網(wǎng)絡(luò)模型表現(xiàn)不一,各有優(yōu)劣,但總體水平比較一般,如圖3所示。

(a) EfficientDet-D0 (b) YOLOV3-TINY
3.2 4種網(wǎng)絡(luò)模型在TX2上實(shí)時(shí)視頻檢測(cè)結(jié)果分析
表3為T(mén)X2上實(shí)時(shí)視頻檢測(cè)結(jié)果。根據(jù)表3的實(shí)時(shí)檢測(cè)結(jié)果以及圖2中給出的4種網(wǎng)絡(luò)模型的mAP值,采用2.5節(jié)的評(píng)分標(biāo)準(zhǔn)計(jì)算了各模型在TX2上的評(píng)分結(jié)果,如表4所示。從表4可以看出YOLO-FASTEST和EfficientDet-D0在資源占用項(xiàng)得分很高,特別是前者,因其模型尺寸最小,占用內(nèi)容也最少。出乎意料的是,雖然YOLO-FASTEST是C語(yǔ)言編寫(xiě)且模型很小,但其檢測(cè)速度只排在第3位,無(wú)法達(dá)到實(shí)時(shí)障礙檢測(cè)的效果,與原文試驗(yàn)結(jié)果相差很大。究其原因,可能是TX2的GPU與原文試驗(yàn)中的型號(hào)不同,在TX2的GPU和CPU上,其核心Darknet分組卷積沒(méi)有得到很好的支持(可能與NVIDIA的CUDNN有關(guān)),檢測(cè)效率低下,導(dǎo)致在TX2上的檢測(cè)速度很慢,其運(yùn)行效率反而不如使用python編寫(xiě)的YOLOV3-TINY和YOLOV4-TINY,僅略強(qiáng)于模型復(fù)雜度遠(yuǎn)高于它的EfficientDet-D0。這說(shuō)明模型尺寸小和高效編程語(yǔ)言并不能必然導(dǎo)致模型速度快,對(duì)于并行單元很多的深度檢測(cè)模型,各種支持庫(kù)和深度開(kāi)發(fā)平臺(tái)與運(yùn)行硬件的配合與優(yōu)化可能更為重要。
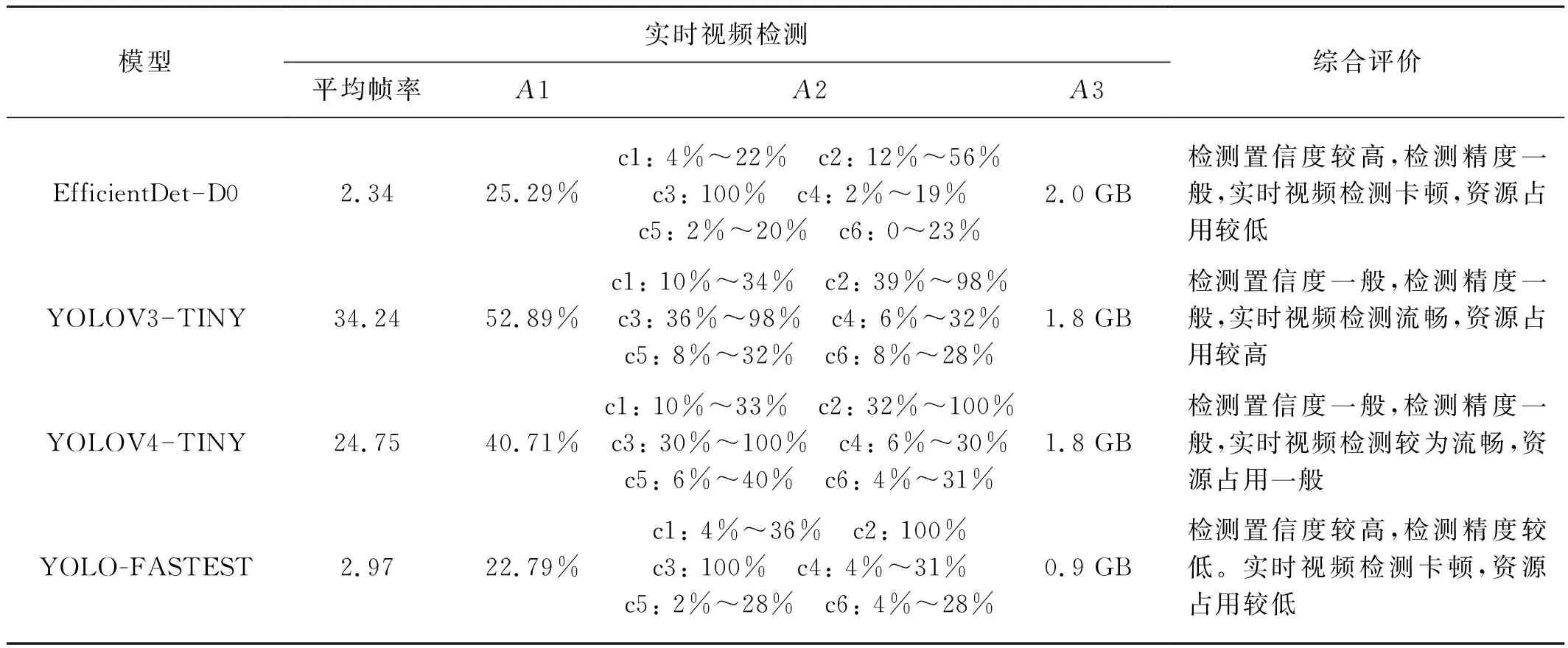
表3 TX2視頻實(shí)時(shí)檢測(cè)試驗(yàn)結(jié)果Tab. 3 Experimental results of real-time video detection on TX2
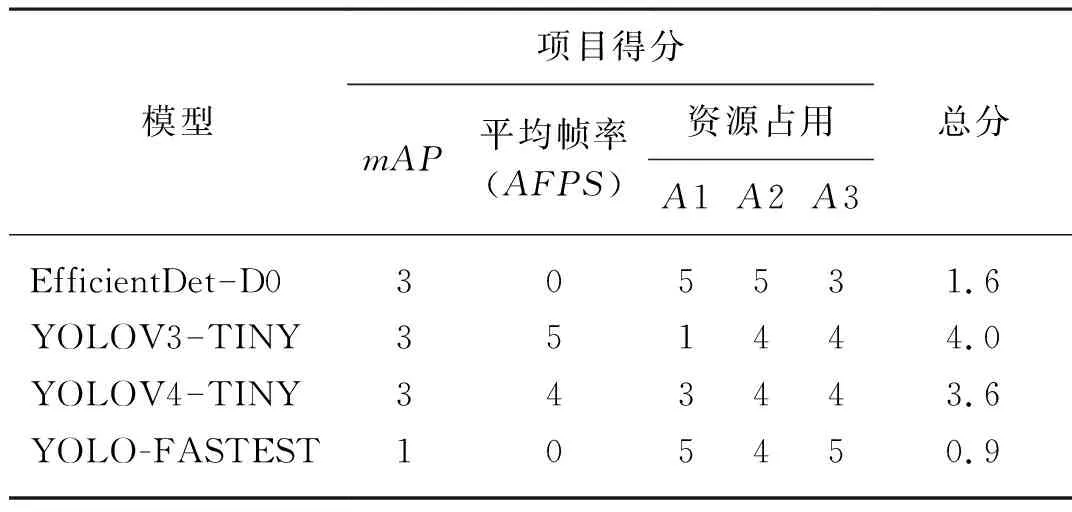
表4 4種網(wǎng)絡(luò)模型得分表Tab. 4 Score table of four network models
由表4可得,對(duì)于“平均幀率”檢測(cè)項(xiàng),YOLOV3-TINY和YOLOV4-TINY排在前2位,可以實(shí)現(xiàn)實(shí)時(shí)檢測(cè),且其mAP值均較高,雖然占用資源項(xiàng)得分較低,但憑借w1和w2的高權(quán)重,使其分別占得綜合評(píng)分的前2位。因此在TX2上進(jìn)行單純性的障礙檢測(cè)時(shí),可優(yōu)先選擇YOLOV3-TINY。如果實(shí)際自動(dòng)駕駛系統(tǒng)由多種模塊組成,當(dāng)有多個(gè)深度學(xué)習(xí)任務(wù)同時(shí)需要申請(qǐng)GPU時(shí),考慮到Y(jié)OLOV3-TINY對(duì)GPU占用率最高,采用YOLOV4-TINY可能更有利于系統(tǒng)整體性能的提升。
3.3 4種網(wǎng)絡(luò)模型的對(duì)比
EfficientDet-D0的優(yōu)點(diǎn)是對(duì)于9類(lèi)障礙物中的5類(lèi)障礙目標(biāo)檢測(cè)精度相比而言最高,且其檢測(cè)置信度非常高,不易出現(xiàn)誤判,消耗系統(tǒng)計(jì)算資源較少,利于系統(tǒng)其他程序運(yùn)行。缺點(diǎn)是其對(duì)細(xì)小障礙目標(biāo)的檢測(cè)存在較為明顯的檢測(cè)精度短板,進(jìn)而導(dǎo)致了總體檢測(cè)精度的下降,因其對(duì)于系統(tǒng)計(jì)算資源的調(diào)用不夠充分導(dǎo)致了實(shí)時(shí)檢測(cè)速度慢。EfficientDet-D0對(duì)本場(chǎng)景的適用性較差,更適合靜態(tài)圖片檢測(cè)。
YOLOV3-TINY的優(yōu)點(diǎn)是對(duì)于9類(lèi)障礙物的總體檢測(cè)精度最高,且沒(méi)有檢測(cè)短板,實(shí)時(shí)視頻檢測(cè)流暢。缺點(diǎn)是其檢測(cè)置信度一般,可能出現(xiàn)誤判且系統(tǒng)計(jì)算資源占用較高。YOLOV3-TINY對(duì)本場(chǎng)景的適用性相比之下最好,適合運(yùn)行單障礙檢測(cè)任務(wù)的場(chǎng)合。
YOLOV4-TINY的優(yōu)點(diǎn)是平衡性較好,可以在系統(tǒng)計(jì)算資源占用適中的情況下進(jìn)行較為流暢的實(shí)時(shí)視頻檢測(cè),且不存在精度上的明顯短板。缺點(diǎn)是檢測(cè)置信度一般,可能出現(xiàn)誤判。YOLOV4-TINY對(duì)本場(chǎng)景的適用性較好,適合多任務(wù)并行運(yùn)行的場(chǎng)合。
YOLO-FASTEST的優(yōu)點(diǎn)是檢測(cè)置信度較高,且系統(tǒng)計(jì)算資源占用相比而言最低;缺點(diǎn)是檢測(cè)精度差,存在短板,且因CUDA對(duì)于C語(yǔ)言程序支持性較差導(dǎo)致了系統(tǒng)資源調(diào)用不充分,致使實(shí)時(shí)視頻檢測(cè)卡頓。YOLO-FASTEST對(duì)本場(chǎng)景的適用性差,更適合靜態(tài)圖片檢測(cè)場(chǎng)景。
4 結(jié)論
為了實(shí)現(xiàn)在邊緣設(shè)備TX2上進(jìn)行葡萄園田間場(chǎng)景目標(biāo)檢測(cè),本文使用4種目前較為熱門(mén)的輕量級(jí)目標(biāo)檢測(cè)神經(jīng)網(wǎng)絡(luò)模型在自建數(shù)據(jù)集上進(jìn)行訓(xùn)練,并移植到TX2上進(jìn)行了試驗(yàn),得到以下結(jié)論。
1) YOLOV3-TINY作為一款2018年提出的輕量級(jí)網(wǎng)絡(luò)模型,在自建數(shù)據(jù)集上,其mAP值(64.8%)領(lǐng)先于EfficientDet-D0(59.8%)、YOLOV4-TINY(60.1%)、YOLO-FASTEST(40.1%),且各子類(lèi)AP值并無(wú)明顯的非常低的短板(<10%)。
2) EfficientDet-D0與YOLO-FASTEST對(duì)于AP值較好的類(lèi)別(>80%)目標(biāo)檢測(cè)置信度比YOLOV3-TINY、YOLOV4-TINY高,且更穩(wěn)定,YOLOV3-TINY、YOLOV4-TINY在AP值較好的類(lèi)別目標(biāo)檢測(cè)中存在置信度較低且波動(dòng)明顯的問(wèn)題。
3) 根據(jù)試驗(yàn)結(jié)果,在TX2上,如無(wú)需同時(shí)運(yùn)行多個(gè)GPU任務(wù),YOLOV3-TINY得分最高,可以流暢的進(jìn)行攝像頭視頻檢測(cè),實(shí)時(shí)性較其他3種輕量級(jí)網(wǎng)絡(luò)模型更優(yōu),但是其實(shí)時(shí)視頻檢測(cè)耗費(fèi)GPU資源較大。如需同時(shí)運(yùn)行多個(gè)GPU任務(wù),YOLOV4-TINY可以在消耗較少計(jì)算資源的情況下比較流暢的進(jìn)行實(shí)時(shí)視頻檢測(cè)。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12