農機自動駕駛設備作業檢測系統的設計與實現
2021-09-23 00:50:20楊宏偉蘇仁忠解曉琴
河北工業科技 2021年4期
楊宏偉 蘇仁忠 解曉琴
摘要:為了滿足精準農業領域對農機自動駕駛系統作業進行性能評估和質量管控的需求,解決常規人工測量中誤差大、不確定度高的難題,設計一種在真實作業環境中使用的高精度檢測系統,使用組合導航系統為核心組件搭建硬件采集設備,運用動態后處理技術(PPK)對觀測數據進行深耦合處理,并開發基于JavaScript的自動化評估軟件,實現檢測過程中的人機交互、數據提取、地圖直觀顯示和結果統計。選擇不同型號的樣機在硬化場地和農田熟地進行試驗,結果表明:系統采集的作業數據連續、穩定,耦合處理的精度較高,能夠直觀準確地評估農機自動駕駛設備的作業性能。系統可應用于北斗農機輔助自動駕駛設備的作業評價和質量鑒定,有助于推動國家農機購置補貼和質量認證政策的落地。
關鍵詞:衛星導航;精準農業;自動駕駛;作業性能;檢測系統;PPK
中圖分類號:TN966文獻標識碼:ADOI: 10.7535/hbgykj.2021yx04004
Design and implementation of operation performance detection system
for agricultural machinery automatic driving equipment
YANG Hongwei1,SU Renzhong2,XIE Xiaoqin 1
(1.The 54th Research Institute of CETC, Shijiazhuang,Hebei? 050081, China;2.Hubei Agricultural Mechanization Technology Extension Station, Wuhan, Hubei 430017, China)
Abstract:In order to satisfy the requirements of the operating-performance evaluation and the quality control for automatic driving of agricultural machinery in precision agriculture, and to solve the problems of high error and uncertainty in the usual manual measurements,a high precision detection system used in real working environment was designed and the integrated navigation system was used as the core component to set up the hardware acquisition instrument.The dynamic post processing kinetic (PPK) method was applied to process the observed deeply-coupled data and the automated assessment software was developed based on JavaScript to realize human-computer interaction, data extraction, map visualization and result statistics in the detection process. Finally, different types of prototypes were tested in hardening sites and farmland.The results show that the operating data acquired by the system is continuous and stable. Furthermore, the coupling-processing method has a high precision, which can directly and accurately evaluate the operating performance of the agricultural machinery automatic driving equipment.The system can be applied to the operation evaluation and quality appraisal of Beidou agricultural machinery satellite navigation auxiliary automatic driving systems, which can help to realize the policies of national agricultural machinery purchase subsidies and quality certification.
Keywords:satellite navigation; precision agriculture; autonomous driving; operating performance; detection system; PPK
中國是農業大國,傳統的農業機械受限于人工操作,勞動強度大,作業質量完全依賴于駕駛人員的技能,野外夜間作業基本無法實現。隨著近幾年農業機械數字化、智能化的發展,尤其是中國北斗產業的全面推廣,北斗農機輔助自動駕駛設備應運而生,大大提高了農業生產力,使得傳統農業播種、開溝、覆膜、打藥等作業[1]中對直線度及結合線精度無法滿足的問題得以徹底解決。
北斗農機輔助自動駕駛設備融合了北斗導航技術、慣性測量技術、計算機和自動控制技術,各組成部分的性能都將影響到其整機作業性能。目前,市場上的農機輔助自動駕駛設備良莠不齊,一些質量問題影響了用戶體驗和作業效果。國家和地方政府在不斷加大政策引導和農機購置補貼力度,促進農機智能駕駛系統推廣的同時,開始著手促進質量檢測和認證工作的落地[2]。
農機輔助自動駕駛設備的核心應用是實現精準作業。它是把導航模塊采集的位置數據作為控制系統感知參數,進而控制相應的方向盤、轉向電機和液壓裝置[3]等,使得拖拉機在作業時,自動駕駛系統代替人工實現拖拉機作業方向的精準控制。不難看出,農機輔助自動駕駛設備的作業精度主要體現在其對行駛方向的控制上。但目前國內外對作業精度尚沒有統一和規范的指標及評估方法。國外對農機衛星導航自動駕駛作業精度的研究主要集中在利用實時RTK獲取精播和移種等作業軌跡,與標記的地面實況點比對進而獲取作業誤差的均值、方差等評估值方面[4-7]。但這類方法往往安裝耗時、操作復雜、效率較低,測量設備RTK精度也處在厘米級。近兩年在購置補貼政策的引導和鼓勵下,國內農機輔助自動駕駛系統檢測認證的需求越來越大,也出臺了指導檢測的團體標準,一些農機質量鑒定部門據此開始進行檢測能力建設,大多仍舊采用測繩和卷尺測量的人工方法,檢測誤差和測量不確定度均較大。一些國內機構參照國外成熟的導航產品,通過對農機輔助自動駕駛設備中導航模塊的定位精度[8]進行分析來衡量系統的整機作業性能,但這種方法忽略實際作業場景,難以客觀反映真實作業性能。
研究農機導航自動駕駛作業指標評價新技術,搭建高效的檢測系統,使產品的標準符合檢測認證,要求對促進國家購機補貼政策落地和精準農業[9]新技術應用推廣意義重大。第4期楊宏偉,等:農機自動駕駛設備作業檢測系統的設計與實現河北工業科技第38卷
1檢測系統設計
1.1檢測難點分析
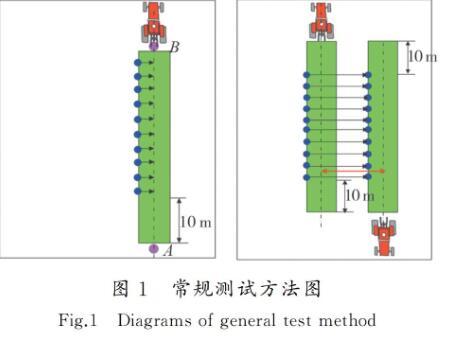
現有國家標準和行業標準[10-11]規定了農機輔助自動駕駛設備的基本要求和評價方法。一般測量方法如圖1所示,預先設定導航線端點A與B,沿AB線完成自動作業后,以作業幅寬中心線為基準。在穩態直線跟蹤段均勻提取作業區域的邊界點若干個,使用卷尺或傳感器量取邊界點至白色基準線之間的距離,后用作業幅寬的一半減去該測量值,即為軌跡跟蹤誤差。其余指標項目的檢測方法類似,人為測量中需人工判定作業邊界點,但受田間試驗場地的平整度影響,目測識別作業痕跡及邊界時存在極大困難,由此引入的不確定度也難以評估。
另一方面,為了滿足國家標準對農機輔助自動駕駛設備2.5 cm的導航精度要求,檢測系統的測量精度至少需要優于8 mm。若使用實時RTK搭建檢測系統,根據目前導航產品技術發展現狀,實時RTK水平標稱精度基本處于± (20+1×D) mm(D為基線長度,km)水平,該標稱值與基線長度、當前載體速度、周圍環境因素等關系密切,尤其在信號遮擋、差分鏈路不穩定等干擾下其定位結果容易產生野值與噪點,最終影響檢測精度。同時檢測設備需要使用慣性測量部件完成場地平整度[12]的監測和數據采集,以消除其對檢測結果的影響。
1.2 基本組成及工作原理
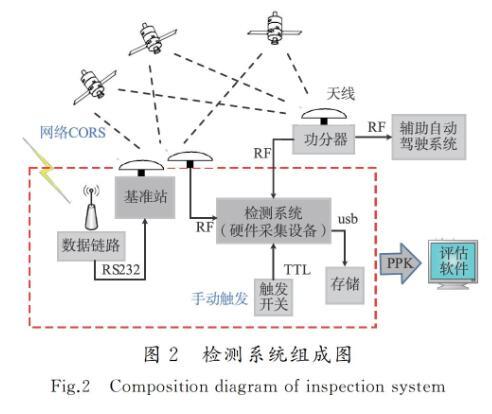
檢測系統基本組成如圖2所示,基準站工作在網絡差分狀態,自身位置精度處于厘米級,同時將采集原始觀測量數據存儲于本地,配置移動電源供電,滿足野外田間測試的需求。硬件采集設備作為移動站,核心組件是組合導航系統,使用時將衛星導航的天線安裝于拖拉機頂部中心軸線上,并使用支架將慣性部件安裝在天線附近,量取天線相位中心與慣導中心的桿臂值。使用中將天線接收的衛星導航信號,通過功分器一路輸出至被測的輔助自動駕駛系統,另一路輸出至檢測系統,實現同一時空環境下對被試樣機的作業數據采集,基站和移動站的距離滿足短基線環境以保障后處理精度。
測試結束后使用動態后處理技術PPK(post processing kinetic),將基站原始觀測數據和移動站觀測數據進行深耦合處理[13],處理中利用采集的GNSS偽距、偽距率修正INS觀測量,INS數據在衛星星歷參數的輔助下,同步計算載體相對于GNSS衛星的偽距和偽距率,并用該信息輔助GNSS信號的接收和碼環鎖相過程,雙向信息交互增強了GNSS信號的快速捕獲和抗干擾能力,從而提高了GNSS的接收機精度、動態性能和可靠性。處理完成后得到農機作業的高精度軌跡數據,并以評估軟件適配的txt格式輸出,進而導入評估軟件,即可實現農機作業的軌跡跟蹤誤差、作業間距誤差、上線距離、抗擾續航時間和停機起步誤差的檢測結果統計。
與現有的其他檢測設備相比較,該系統在數據處理過程中,利用網絡差分服務將基站坐標固定在已知值[14],以確保PPK及深耦合處理中基站位置精度處于厘米級,同時和移動站處于穩定的短基線環境,從而實現移動站在低速動態環境下的毫米級處理精度。同時組合導航系統將極大地提高對環境工況的抗干擾能力[15-16],避免出現噪點而影響采集數據的連續性和可靠性。
1.3硬件采集設備設計
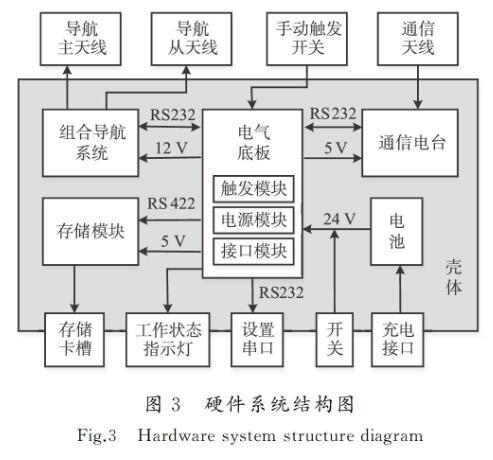
整體采用一體化集成設計,如圖3所示,包括電氣底板、通信電臺、組合導航系統、存儲模塊和電池。高精度組合導航系統采用雙天線配置,通信電臺自帶通信天線,電氣底板上設計有電源模塊、接口模塊和觸發模塊。機殼上裝有狀態指示燈、電源開關、充電接口、指令設置的串口和存儲卡插槽。電池采用內置方式。
組合導航系統選用成熟的定型產品,具備多系統多頻點,用于獲取作業農機的位置和姿態信息觀測量,采用雙天線測向模式,實現慣性測量單位的快速收斂和初始化[17],衛導和慣導觀測量以組合模式傳送至電氣底板接口模塊進行數據分發,采集數據的更新率為10 Hz,最后傳送至存儲模塊,以組合導航系統默認的觀測量輸出格式存儲于SD卡中。
通信電臺選用4G-DTU模塊[18]。一端通過天線與TCP協議建立無線數據連接,實現上位機端的遠程監測,另一端通過RS232總線與電氣底板連接,實現上位機端與系統的交互通信。
存儲模塊用于存儲高精度組合導航系統或GNSS系統輸出的原始數據,同樣由電源模塊進行電壓管理,提供5 V電源,其連接至機殼上的存儲卡槽,采用RS422串口通道進行數據拷貝。
電氣底板上電源模塊將電池電壓轉換為高精度組合導航系統、通信電臺、存儲模塊所需要的電壓。電壓信號通過2只開關電源芯片,分別產生組合導航系統所需的12 V電源以及通信電臺和存儲模塊所用的5 V電源。
在接口連接設計上[19],GNSS系統的第一TTL串口可通過電氣底板上的TTL轉RS422接口電路連接至存儲模塊,GNSS系統的第二、第三TTL串口可通過電氣底板分別與2個通信電臺的TTL串口進行交叉連接;高精度組合導航系統輸出的2路標準RS232串口信號,可通過電氣底板上的RS232轉TTL接口電路與2個通信電臺的TTL串口進行交叉連接。
1.4評估軟件系統設計
用于農機輔助自動駕駛設備作業性能檢測的專用軟件,其讀取硬件采集的拖拉機作業軌跡數據后,提取其中的位置信息和時間信息,結合軟件界面輸入的作業參數進行運算,輸出作業性能指標的檢測結果。為提供良好的人機界面,軟件提供導航線設置區域、檢驗分項菜單區域、地圖及標記區域、結果顯示區域、分項參數設置及操作區域。
采用 JavaScript 進行開發[20]。測試評估軟件的流程如圖4所示,軌跡文件讀取完成后,從地圖顯示上提取導航線起始位置坐標,使用方向切換模塊繪制8條正確的導航線,顯示正確后,根據所選的檢測分項,設置參數模塊。以硬件測試設備采集的姿態角數據(俯仰角及橫滾角)作為地面平整度數據,設置合適的閾值,當姿態角超過閾值時將對應時刻的位置數據作為噪點剔除,剩余數據參與后續計算。模塊中直線行駛誤差計算按照式(1)和式(2) 計算,作業間距誤差按照式(3)和式(4)計算,上線距離、抗擾續航時間和停機起步誤差的統計均按照標準方法進行[10]。將計算后的結果顯示在對應窗口中,然后根據地圖標記判斷結果是否符合要求,進而導出報表。
Li=axi+byi+ca2+b2,i=1,2,…,n,(1)
SL=∑ni=1L2in,(2)
式中:Li為采集的位置樣本點距離預設導航線的水平距離,通過獲取的導航線起始位置點的坐標確定參數a,b,c;(xi,yi)為第i個定位結果在站心地平坐標系下的北、東坐標,單位為m;SL為直線行駛誤差最終統計結果。
ΔHi=Hi-H0,i=1,2,…,n,(3)
S=∑ni=1ΔHi2n,(4)
式中:Hi為實際作業軌跡間距;H0為預設間距;S為作業間距誤差最終統計結果。
2系統試驗
為了驗證檢測系統的可用性和工作穩定性,在狀態良好的2臺裝配有輔助自動駕駛系統的輪式拖拉機樣機上加裝檢測系統,分別選取2塊面積均大于100 m×50 m的硬化場地和農田熟地進行試驗,試驗速度均設定為7 km/h,直線行駛的穩定區段大于80 m,硬化場地內使用華夏954 輪式拖拉機(發動機標定功率69.9 kW,裝配AG302BD-2.5GD型自動駕駛系統),熟地(試驗前經過耕深為20.5 cm的犁具平整)內使用山托MG2104 輪式拖拉機(發動機標定功率155 kW,裝配FARMSTARF2BD-2.5RD型自動駕駛系統),如圖5所示。
圖6顯示了硬化場地和農田熟地中的驗證結果。界面中紅色曲線為拖拉機實際作業軌跡,黑色直線為預設導航線,左下方為統計結果。表1中整理了2種場地中的檢測結果,軌跡跟蹤誤差和作業間距誤差均在穩定區段內完成位置樣本(即軌跡點定位結果)采集,采集的位置樣本數量分別為428和402,上線距離、抗擾續航時間和停機起步誤差均測試3次,取其均值為最終結果。2臺試驗樣機作業性能的檢測結果均在標準要求[10]范圍內,且與對應機型農機輔助自動駕駛設備的技術指標規格相符合。不難看出,軌跡跟蹤精度和間距誤差指標在水泥硬化區域的測試結果要優于農田熟地,這也與實際場地條件相一致。
3結語
針對農機導航自動駕駛設備作業性能的質量鑒定需求,設計完成了一種高精度動態檢測系統,極大地提高了檢測的效率和精度。
該檢測系統具有以下特點:1)可在檢測現場實時固定基站坐標,自建短基線檢測環境,具備較好的場地適應性,同時可以確保PPK處理精度;2)綜合運用PPK及組合導航深耦合處理技術,實現了檢測系統的毫米級精度提升,同時保障了系統的高可靠性和抗干擾性;3)硬件設計結構緊湊、功能完備,使用便捷;4)設計的專業軟件提供了友好的交互環境和自動化處理流程,極大地提高了檢測效率。
目前該系統經第三方計量機構校準合格后,已應用于農業部農機鑒定總站的型式試驗及認證工作中,產生了較好的社會和經濟效益。但本研究遺留了2個問題:一是系統試驗階段,地面平整度和環境噪聲對檢測精度的影響尚未進行詳實的試驗與分析,檢測系統精度還有進一步提升的空間;二是檢測系統配置PPK后處理軟件增加了系統本身的成本,影響其使用及推廣。今后將在本研究的基礎上,對遺留問題進行持續研究,以進一步提高檢測精度并降低成本,提升系統的應用潛力和推廣度。
參考文獻/References:
[1]張野,張瑞宏,金亦富,等.基于北斗導航的自動駕駛系統在農用拖拉機上的應用[J].農業裝備技術,2016,42(3):8-10.
[2]耿楷敏,宋仁龍.農機導航自動駕駛系統前裝認證研究[J].農機科技推廣,2019,204(10):28-30.
[3]唐天石.淺談液壓和電動兩種農機自動駕駛的方式[J].農業工程技術,2019,39(36):70-72.
[4]PREZ-RUIZM P,SLAUGHTERD C,GLIEVER C J.Automatic GPS based in tra-row weed knife control system for transplante drow crops[J].Computers and Electronics in Agriculture,2012,80:41-49.
[5]YAO? L,LI L,ZHANG M.Automatic guidance of agricultural vehicles based on global positioning system[J].IFIP Artificial Intelligence Applications and Innovations,2005,186:617-624.
[6]PREZ-RUIZ M,CARBALLIDO J,AGUERA J,et al.Assessing GNSS correction signals for assisted guidance systems in agricultural vehicles[J].Precision Agricultural,2011,12:639-652.
[7]MAGAR A P,SINGH M,MAHAL J S.Efficient tractor operation through satellitenavigator[J].Scientific Research and Essays,2014,9(17):768-777.
[8]中國衛星導航系統管理辦公室.BD 420009—2015:北斗/全球衛星導航系統(GNSS)測量型接收機通用規范[S].2015.
[9]王宗岐.精確農業理念對傳統農機的影響及新機型應用展望[J].農機使用與維修,2020(2):108.
[10]中國農業機械工業協會.T/CAAMM 13—2018.農業機械衛星導航自動駕駛系統前裝通用技術條件[S].2018.
[11]GB/T 37164—2018.自走式農業機械導航系統作業性能要求及評價方法[S].
[12]萬豪,莫中秋,張宇.農業機械自動駕駛系統軌跡跟蹤誤差測試[J].無線電工程,2020,50(5):373-376.
WAN Hao,MO Zhongqiu,ZHANG Yu.Test of trajectory tracking error of agricultural machinery automatic driving system[J].Radio Engineering,2020,50(5):373-376.
[13]智奇楠,周俊,李梟楠,等.高精度GNSS/INS組合定位測姿系統設計及實現[J].科技與創新,2019(17):42-45.
[14]柴艷菊,陽仁貴,王海濤,等. GPSINSIGG1.0軟件與IE軟件結果對比分析[C]//第三屆中國衛星導航學術年會.廣州:中國衛星導航學術年會組委會,2012:42-47.
[15]徐丹龍.BDS/GPS組合動態測量效果分析[J].測繪與空間地理信息,2020,43(2):128-131.
XU Danlong.Analysis of BDS/GPS and combined dynamic measurement[J].Geomatics & Spatial Information Technology,2020,43(2):128-131.
[16]劉洋,曾群意,李建軍,等.組合GNSS系統定位數據質量與精度比較分析[J].北京測繪,2020,34(1):118-122.
LIU Yang,ZENG Qunyi,LI Jianjun,et al.Comparison and analysis of quality and accuracy of positioning data of combined GNSS system[J].Beijing Surveying and Mapping,2020,34(1):118-122.
[17]李姍姍.低成本MEMS-INS/GNSS組合導航動基座初始對準技術研究[D].武漢:武漢大學,2018.
LI Shanshan.Research on In-motion Alignment Technology of Low-cost MEMS-INS/GNSS[D].Wuhan:Wuhan University,2018.
[18]宋俊慷,黃秀梅,楊秀增.物聯網開放平臺在智慧農業監測系統中的應用[J].農村經濟與科技,2020,31(18):89-91.
[19]蘇燕,周士龍.RS232-RS422/RS485/TLL信號轉換器設計[J].山東商業職業技術學院學報,2012,12(2):92-94.
SU Yan,ZHOU Shilong.The design points of RS232 -RS422/RS485/TLL signal converter[J].Journal of Shandong Institute of Commerce and Technology,2012,12(2):92-94.
[20]ZAKAS N C. JavaScript 高級程序設計[M].李松峰,曹力,譯.2版.北京:人民郵電出版社,2010.
