先進(jìn)控制策略在SUPCON DCS中應(yīng)用研究
2021-09-24 05:51:12陳衛(wèi)紅楊明輝鄧曉剛
自動化與儀表 2021年9期
陳衛(wèi)紅,楊明輝,鄧曉剛,劉 寶
(中國石油大學(xué) 控制科學(xué)與工程學(xué)院,青島266580)
集成4C 技術(shù)的DCS 控制系統(tǒng)廣泛用于現(xiàn)代工業(yè)生產(chǎn)中。DCS 系統(tǒng)的先進(jìn)結(jié)構(gòu)滿足了現(xiàn)代產(chǎn)業(yè)生產(chǎn)管理的要求,大大提高了企業(yè)的自動化和管理水平。由于巨大的經(jīng)濟(jì)和社會利益,它已經(jīng)成為控制產(chǎn)業(yè)過程的重要部分。但是,目前DCS 在應(yīng)用過程中,先進(jìn)控制算法采用較少,大多使用DCS 系統(tǒng)自帶的傳統(tǒng)控制模塊。但是,在實際的工業(yè)生產(chǎn)過程中,有很多不確定的因素,有時傳統(tǒng)的控制難以達(dá)到其效果,也會影響產(chǎn)品質(zhì)量。先進(jìn)控制是遵循對象過程動態(tài)性能的控制技術(shù),它的控制策略可以根據(jù)過程環(huán)境的實時變化而制定,體現(xiàn)出“動態(tài)性”特點。因此,將先進(jìn)控制與穩(wěn)定可靠的DCS 系統(tǒng)相結(jié)合,將先進(jìn)控制優(yōu)良動態(tài)特征應(yīng)用到DCS 系統(tǒng)中,可大大提高控制質(zhì)量[1-3]。本文以A3000 過程裝置雙容水箱為控制對象,基于SUPCON JX-300XP DCS系統(tǒng),開展了部分先進(jìn)控制的探索研究。
SUPCON JX-300XP DCS 的硬件由“四站一線”結(jié)構(gòu)組成,即:工程師站、控制站、操作站、通訊網(wǎng)絡(luò)。軟件由AdvanTrol-Pro 實現(xiàn)各組態(tài)與系統(tǒng)運行監(jiān)控[4]。
1 基于JX-300XP DCS 先進(jìn)控制方案
雙容水箱對象是一個二階時滯、開環(huán)漸近穩(wěn)定的非最小相位系統(tǒng)。根據(jù)被控對象特點,針對JX-300XP DCS 開展DMC 先進(jìn)控制研究,采用DMCPID 串級控制結(jié)構(gòu)[5-6],即內(nèi)環(huán)用DCS 自帶的高采率PID 常規(guī)控制,可以抑制大部分的主要干擾,外環(huán)采用DMC 控制,具有良好動態(tài)跟蹤性、魯棒性。
DMC-PID 串級結(jié)構(gòu)設(shè)計,在實際應(yīng)用中有現(xiàn)實意義。當(dāng)DMC 算法跑飛或失控時,利用DCS 系統(tǒng)本身穩(wěn)定的PID 控制同樣可以對過程或?qū)ο笃鸬胶芎玫恼{(diào)節(jié)作用,使得系統(tǒng)的運行的安全保障大為增強。這種結(jié)構(gòu)較好地結(jié)合、發(fā)揮了DMC 和PID 控制各自優(yōu)點,增強了魯棒性和抗干擾性,同時又使控制過程保持良好的跟蹤性能。DMC-PID 串級控制結(jié)構(gòu)如圖1所示。
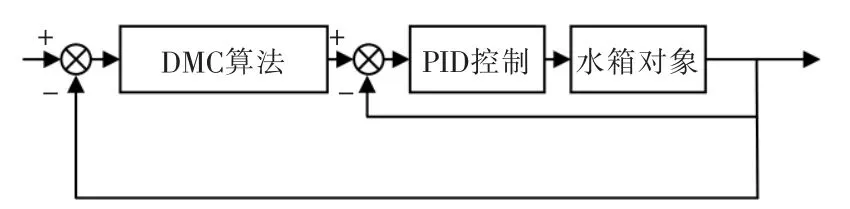
圖1 DMC-PID 控制原理圖Fig.1 DMC-PID control principle diagram
2 JX-300XP DCS 先進(jìn)控制的實現(xiàn)
在DMC-PID 串級控制的實現(xiàn)過程中[7],采用DCS完成PID 內(nèi)環(huán)控制。在Matlab 環(huán)境中實現(xiàn)DMC 外環(huán)控制,充分利用Matlab 強大的運算功能和控制工具函數(shù),給DMC 的實現(xiàn)帶來極大的便利性、快速性。OPC 通信技術(shù)用于構(gòu)建PID 和DMC 之間的實時數(shù)據(jù)傳輸橋梁,這一開放性結(jié)構(gòu)框架也便于在JX-300XP DCS 系統(tǒng)中展開更多其它先進(jìn)控制算法的研究和實現(xiàn)。方案實現(xiàn)基本流程如圖2所示。
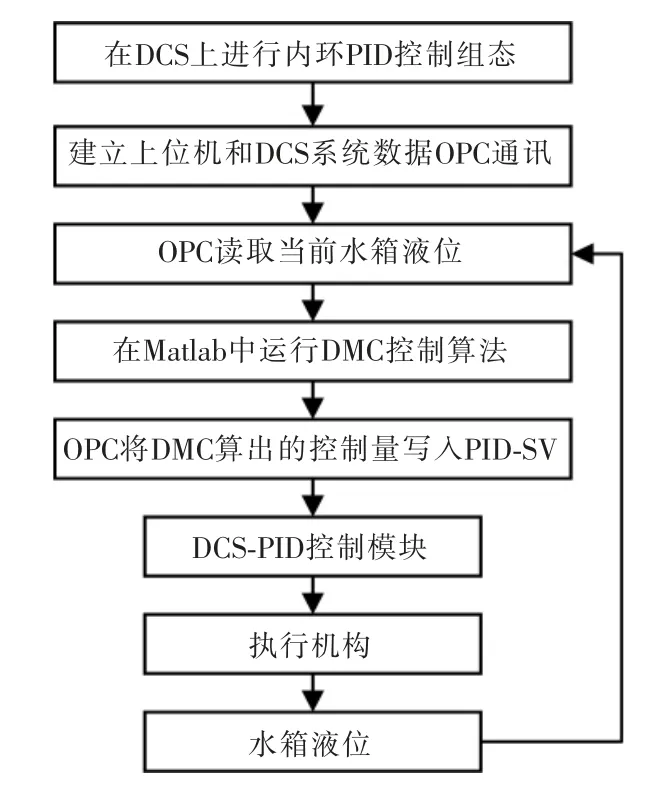
圖2 先進(jìn)控制實現(xiàn)方案基本流程Fig.2 Basic flow chart of advanced control realization scheme
2.1 DCS-PID 控制實現(xiàn)
根據(jù)控制需求制定對象結(jié)構(gòu)流程,在JX-300XP DCS 上完成各相關(guān)組態(tài)。首先進(jìn)行控制站組態(tài),完成主機設(shè)置、I/O 設(shè)置,設(shè)置常規(guī)控制方案等;然后進(jìn)行操作站相關(guān)組態(tài),主要完成操作小組的設(shè)置,總貌、趨勢、分組等畫面等組態(tài),一覽圖和流程圖的組態(tài),基本組態(tài)完成后可方便對系統(tǒng)進(jìn)行實時監(jiān)控。帶控制點的流程圖如圖3所示。
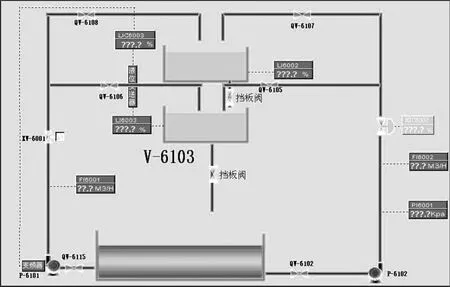
圖3 流程圖(帶控制點)畫面Fig.3 Flow chart screen(with control points)
全部組態(tài)完成后,對整個系統(tǒng)進(jìn)行聯(lián)校、測試,確認(rèn)無誤后進(jìn)行內(nèi)環(huán)PID 控制測試,整定好P、I、D參數(shù),為先進(jìn)控制研究做好充分的準(zhǔn)備。
2.2 建立OPC 通信實現(xiàn)數(shù)據(jù)交換
OPC 是新一代為方便硬件設(shè)備、軟件等信息交互的技術(shù)接口。在該方案中,JX-300XP OPC 服務(wù)器用于提供經(jīng)由OPC 接口發(fā)送到Matlab 應(yīng)用程序OPC 客戶端相關(guān)數(shù)據(jù)收集[8]。在Matlab 程序中進(jìn)行DMC 算法數(shù)據(jù)處理,然后將控制量通過OPC 寫入DCS-PID 環(huán)節(jié),實現(xiàn)Matlab 與DCS 的動態(tài)數(shù)據(jù)交換,完成DMC-PID 串級控制。Matlab 訪問JX-300XP OPC 服務(wù)器具體過程如圖4所示。基本步驟如下:
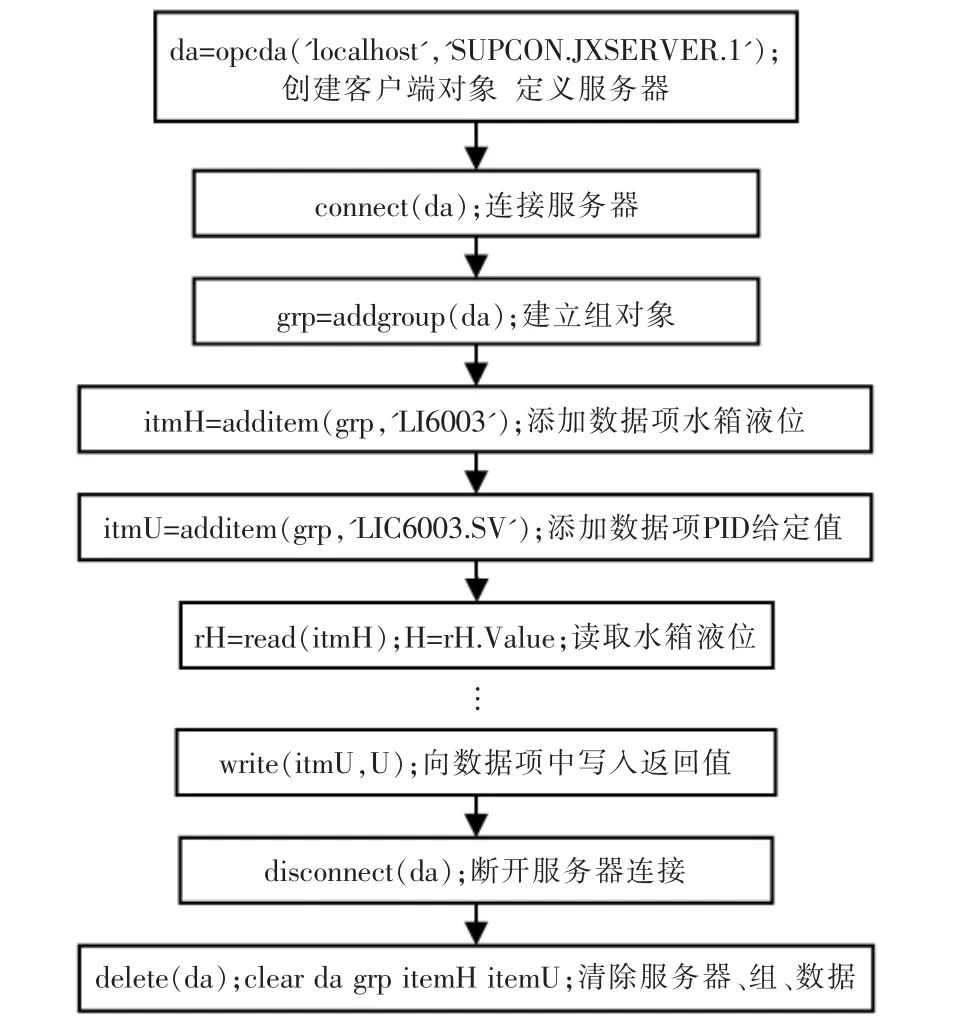
圖4 Matlab 訪問JX-300XP OPC 服務(wù)器基本流程圖Fig.4 Basic flow chart of Matlab accessing JX-300XP OPC server
(1)檢查JX-300XP DCS 中OPC 服務(wù)器軟件安裝情況,如果沒有,安裝并測試。
(2)開啟OPC 服務(wù)器,用SUPCON OPC Server軟件選擇前面已經(jīng)完成的PID 組態(tài)。
(3)打開FactorySoft OPC Client 軟件,連接DCSOPC 服務(wù)器,注意Server Name 選擇SUPCON.JX Server.1。
(4)創(chuàng)建OPC 存、取數(shù)據(jù)組對象,增加相關(guān)數(shù)據(jù)項即Add Item,選擇LI6003(水箱液位測量值)和LIC6003.SV(內(nèi)環(huán)PID 控制的給定值)。
(5)Matlab 應(yīng)用程序?qū)Ω鲾?shù)據(jù)項運算、處理、優(yōu)化等。
(6)Matlab 處理結(jié)果寫入LIC6003.SV,發(fā)送到DCS 系統(tǒng)中。
(7)關(guān)閉服務(wù)器、清除各數(shù)據(jù)項。
2.3 DMC 在Matlab 中實現(xiàn)
2.3.1 DMC 預(yù)測控制簡介
DMC 預(yù)測控制就是利用模型預(yù)測系統(tǒng)在特定控制作用下的未來動態(tài)行為,根據(jù)要求滾動求解最優(yōu)控制,再滾動每一步檢測實時信息,修正對未來動態(tài)行為的預(yù)測。模型預(yù)測、滾動優(yōu)化和反饋校正是其三大基本原理[9]。
預(yù)測模型是預(yù)先描述系統(tǒng)動態(tài)特性,通過該系統(tǒng)歷史數(shù)據(jù)和未來輸入,預(yù)測未來時限區(qū)間的輸出值。反饋校正是每個采樣時間先檢測對象實際輸出狀態(tài),在優(yōu)化控制效果之前,使用反饋信息校正來使下一預(yù)測和優(yōu)化接近實際,以此修正模型預(yù)測不準(zhǔn)確性。滾動優(yōu)化是預(yù)測控制的核心,其保持了優(yōu)化控制的原理,但它不是全局優(yōu)化,而是隨時間分段優(yōu)化,在每個時間點,提出基于與預(yù)測時間區(qū)域相關(guān)的局部優(yōu)化指標(biāo),并重復(fù)在線優(yōu)化,采用滾動優(yōu)化目標(biāo)函數(shù),選擇未來控制時域內(nèi)控制增量,盡量使未來優(yōu)化時域內(nèi)預(yù)測輸出與期望輸出靠近。DMC 結(jié)構(gòu)原理如圖5所示。
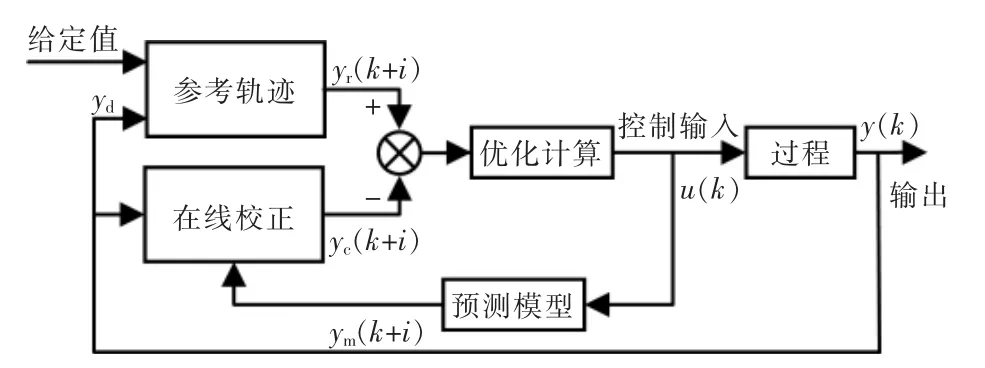
圖5 DMC 結(jié)構(gòu)示意圖Fig.5 Schematic diagram of DMC structure
2.3.2 DMC 預(yù)測控制算法設(shè)計
在實現(xiàn)DMC 控制算法過程中,首先,計算模型參數(shù)、控制參數(shù)和校正參數(shù)。模型向量{ai}可以由手動給過程對象加單位響應(yīng)采樣賦值得到。在計算模型參數(shù)a 時,由于測量是在水箱液位穩(wěn)態(tài)下進(jìn)行的,在處理時要減去穩(wěn)態(tài)初值,就得到一組從0 開始變化的模型參數(shù)a 即Δa。另外要特別注意,采集{ai}時應(yīng)對數(shù)據(jù)中噪聲、干擾等濾波處理,以免影響控制質(zhì)量。控制系數(shù){di}根據(jù)上面的模型參數(shù){ai}和優(yōu)化策略P、M、Q、R 等由公式計算得出。校正系數(shù){hi}根據(jù)實際情況確定[10-11]。
DMC 運行計算通過初始化和實際控制兩部分完成。初始化部分先采集對象當(dāng)前輸出y(k),并設(shè)置其為預(yù)測初始值y~0(k+i∣k),i=1……N。實時控制模塊在線計算未來輸出的期望預(yù)測值。其計算流程如圖6所示。
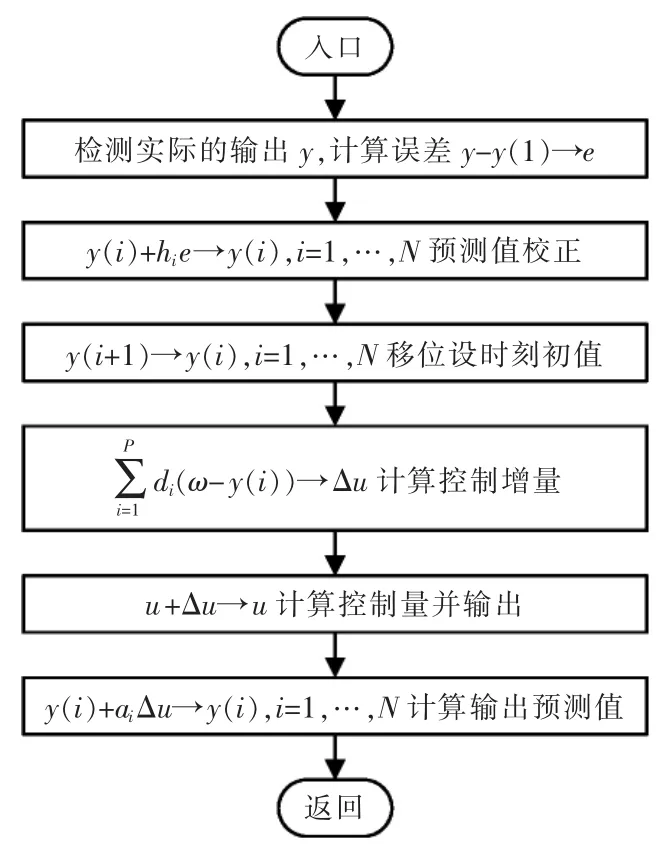
圖6 DMC 動態(tài)矩陣控在線計算流程Fig.6 DMC dynamic matrix control online calculation flow chart
在設(shè)計中要確定的參數(shù)有:
(1)采樣周期Ts。Ts必須滿足采樣定理,并與被控對象類型和動態(tài)特性有關(guān)。
(2)優(yōu)化時域P 和誤差權(quán)矩陣Q。在應(yīng)用過程中,P 值必須超過控制對象階躍響應(yīng)的時間延遲。對于動態(tài)復(fù)雜對象一般有:

(3)控制時域M。M 表示優(yōu)化變量的數(shù)量。當(dāng)P確定時,M 越小,更難以密切地追蹤預(yù)期值。在多數(shù)情況下,增大P 和減小M 有類似的效果。在M=1 的情況下,動態(tài)控制系數(shù)的計算最小。從簡化整定步驟出發(fā),先選定M,再整定P。
(4)控制權(quán)矩陣R。R 的作用是防止Δu 發(fā)生劇烈變化。整定時,可開始設(shè)置為零。當(dāng)系統(tǒng)穩(wěn)定時,如果操縱量變化較大,再適當(dāng)加大即可。
(5)校正參數(shù)h。在被控對象受到未知干擾,或預(yù)測輸出由于模型失配而與實際輸出相矛盾時,突現(xiàn)校正作用。
3 研究結(jié)果及數(shù)據(jù)分析
為了便于在SUPCON DCS 系統(tǒng)中展開先進(jìn)控制研究的探索,在研究過程中采用常規(guī)PID 控制和DMC-PID 控制對同一個雙容水箱模型對象進(jìn)行了實時控制。常規(guī)PID 控制效果如圖7所示。
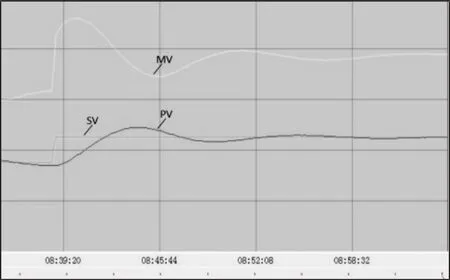
圖7 PID 控制效果(P=50%、I=0.8 min、D=1 s)Fig.7 PID control effect(P=50%、I=0.8 min、D=1 s)
設(shè)定采樣周期Ts=1 s、R=0、Q=eye(P)(Q 是一個單位矩陣) 部分參數(shù),DMC-PID 控制部分效果如圖8、圖9所示。
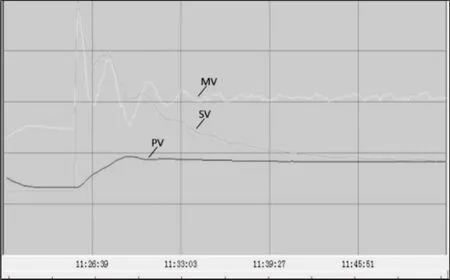
圖8 DMC-PID 控制效果(N=450、P=120、m=1)Fig.8 DMC-PID control effect(N=450、P=120、m=1)
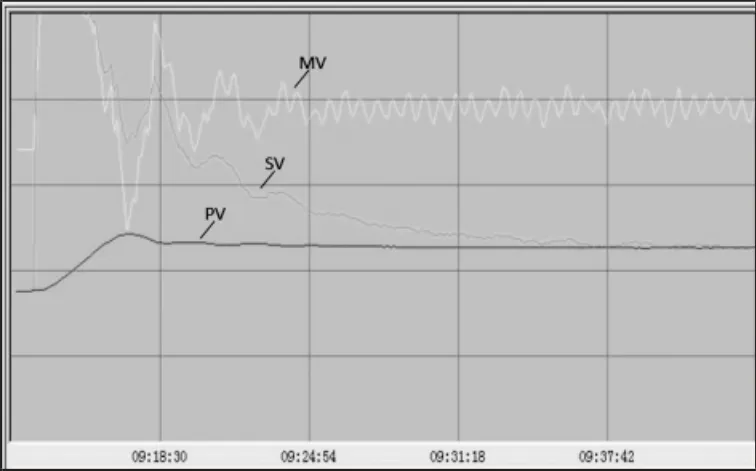
圖9 DMC-PID 控制效果(N=450、P=100、m=1)Fig.9 DMC-PID control effect(N=450、P=100、m=1)
從實際控制效果圖可以明顯得出以下結(jié)果:
(1)PID 常規(guī)控制響應(yīng)速度慢,穩(wěn)定時間較長(20 min 左右),超調(diào)較大,振蕩次數(shù)比較多,動態(tài)性能不能滿足控制要求。
(2)DMC-PID 串級控制效果良好,不僅超調(diào)小、響應(yīng)快(6 min 左右),基本平穩(wěn)無振蕩,具有優(yōu)良的靜態(tài)和動態(tài)特性。
(3)DMC-PID 控制算法預(yù)測長度P 越大預(yù)測越準(zhǔn)確,但穩(wěn)定時間會變慢,預(yù)測長度P 越小,穩(wěn)定時間越短,但是如果P 取值太小可能造成預(yù)測不準(zhǔn)確,當(dāng)P≤N 時,預(yù)測長度P 值只要包含控制對象響應(yīng)長度大部分動態(tài)特性即可。
4 結(jié)語
基于SUPCON DCS 對雙容水箱對象實現(xiàn)DMCPID 控制探索研究,表明有滯后特征復(fù)雜對象,先進(jìn)控制比傳統(tǒng)控制有更好的快速性和穩(wěn)定性。同時表明基于傳統(tǒng)DCS 平臺進(jìn)行先進(jìn)控制的融合也是切實可行的,進(jìn)一步增強了DCS 系統(tǒng)的控制能力。擴大了DCS 應(yīng)用范圍或領(lǐng)域。對現(xiàn)代工業(yè)發(fā)展有重要意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24