基于ABAQUS的模塊化機械手動靜態分析及結構優化
2021-09-27 06:32:04王文軍李福送林偉健
機械 2021年9期
王文軍,李福送,林偉健
基于ABAQUS的模塊化機械手動靜態分析及結構優化
王文軍,李福送,林偉健
(柳州工學院 機械工程學院,廣西 柳州 545000)
模塊化機械手在焊接過程中,運動到某些位置時出現振動幅度比較大的現象,影響了焊接的精度和質量。對模塊化機械手進行動靜態分析,首先利用三維軟件UG NX 12.0對模塊化機械手進行建模,再利用有限元分析軟件ABAQUS對模塊化機械手進行靜力學分析和模態分析。靜力學分析結果表明:模塊化機械手結構的剛度和強度達到工作性能要求。動力學分析結果表明:模塊化機械手第1階固有頻率(1=30.870 Hz)和減速器輸入最小的轉頻(29.13 r/min)很接近,容易出現共振現象。在對第6軸結構優化后進行驗證分析,得出第1階固有頻率為36.033 Hz,比原來提高了16.72%,遠離了減速器的輸入轉頻,避免了共振。本研究為對模塊化機械手改進提供了理論依據。
模塊化機械手;ABAQUS;固有頻率;共振;結構優化
工業機器人是一種能自動控制并可重復編程的多功能操作機,在改進生產模式、優化工作環境、提高產品質量、降低運營成本等方面贏得了企業的廣泛關注,目前廣泛應用于搬運、裝配、焊接、涂裝等領域[1]。工業機器人的種類和樣式繁多,模塊化機械手是其中之一,優點是方便安裝與拆卸、價格相對較便宜。模塊化機械手在焊接過程中,有時會出現劇烈振動現象,影響焊接精度和質量,且噪聲較大。
目前,已有學者對工業機器人的動靜態特性進行研究,胡義華[2]利用ANSYS軟件對物流貨物抓取機械手關鍵構件的結構進行模態分析,得出構件具有良好的動力學性能。陳彥宇等[3]利用ABAQUS軟件對桁架機械手進行靜力學分析和模態分析,得出機身最大變形量和整機的最低固有頻率低于激振頻率,不會發生共振。崔書婉等[4]利用ANSYS軟件對焊接機器人進行靜應力分析和模態分析,根據實際情況提出對應優化方案,發現優化后的焊接機器人在提高了強度、剛度的同時實現了輕量化。趙軍等[5]利用UG軟件系統CAE分析模塊建立在最大垂向力工況下驅動橋殼的動靜態性能分析模型,得出降低橋殼厚度可以提高其低階固有頻率,從而提高橋殼剛度。
對模塊化機械手進行動靜特性分析及結構優化,實現焊接精度和質量的提高,對模塊化機械手的應用有著現實意義。本文以模塊化機械手為研究對象,以現場原型為基礎,從理論方面進行研究。利用UG NX 12.0軟件對模塊化機械手進行三維建模,再利用ABAQUS軟件進行動靜態特性分析,找出大幅度抖動的原因并進行結構優化和改進,從而達到消除或抑制大幅度抖動的目的。
1 模塊化機械手靜力學分析
模塊化機械手屬于關節型機器人,有第1軸~第6軸共6個關節,如圖1所示。在第6軸末端法蘭處安裝焊槍。用地腳螺栓固定底座。首先對模塊化機械手進行靜力學分析,求出機械手主體結構在極限位置時各軸的應力值和最大變形量。確保模塊化機械手不因自重原因出現強度和剛度不能滿足工作性質要求的情況。
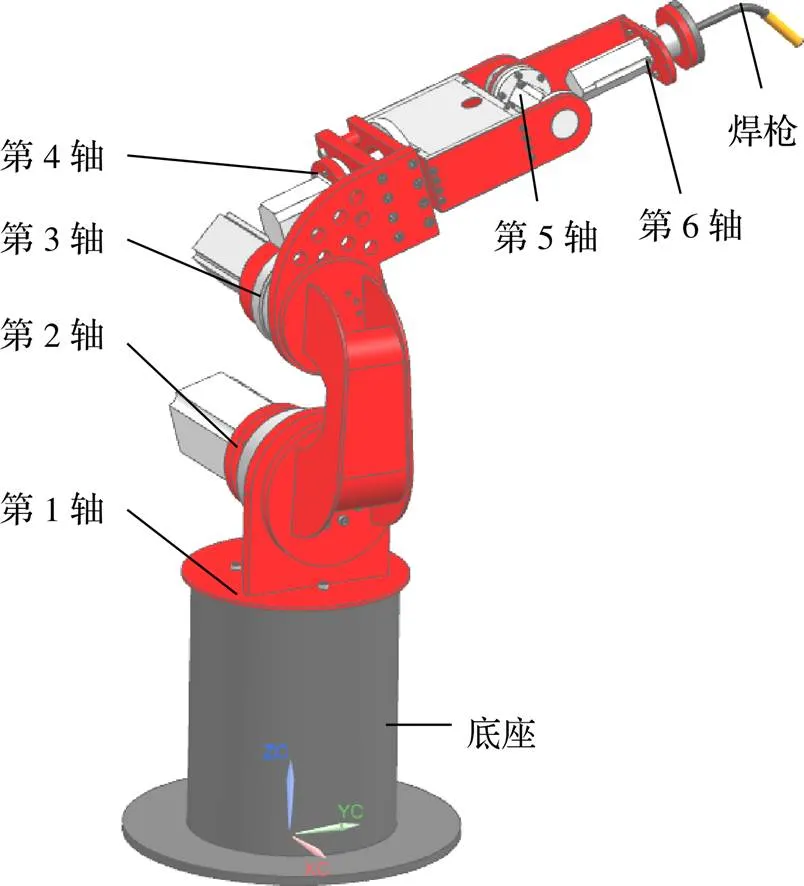
圖1 模塊化機械手三維模型
1.1 三維建模
根據模塊化機械手的技術資料和現場實物,利用UG NX 12.0對其進行建模。
由于模塊化機械手零部件較多,結構較復雜。在確保符合工程技術要求的前提下,對模塊化機械手的三維模型進行相應簡化,使有限元分析模型在計算機得到高效運算。
簡化原則如下[6-7]:
(1)對一些復雜的零件,在保證主體結構性能的提前下進行簡化,例如刪除倒角,小孔;
(2)刪除螺栓和螺母連接,在ABAQUS相互作用模塊中對連接部件設定連接方式;
(3)對電機、編碼器、焊槍、電線進行簡化或在對應連接部件上進行質量附加。
UG NX 12.0和ABAQUS可實現無縫對接。模塊化機械手三維模型可直接導入ABAQUS。導入后對模型進行相應檢查,確保模型完整性。
本臺模塊化機械手應用于焊接,焊槍重量相對比較輕,所以模塊化機械手的各軸連桿構件主要是承受各軸部件自身重力而引起的應力和應變。極限位置是指模塊化機械手受到最大應力、應變和變形量的位置,也就是各軸部件的重力離底座最遠的位置。在極限位置,末端執行器處(焊槍處)是變形量最大的位置[8]。本文選擇模塊化機械手在焊接的極限位置進行分析,如圖2所示。
1.2 定義模型材料屬性
模塊化機械手底座、第2軸和第3軸的部件材料主要是Q235;第4~6軸的部件材料主要是鋁合金ZL108。首先要對模塊化機械手各部件進行材料屬性設置,如表1所示。
在ABAQUS的屬性模塊中輸入各種材料參數時,要統一單位制,因為ABAQUS不會對單位進行分辨[9]。
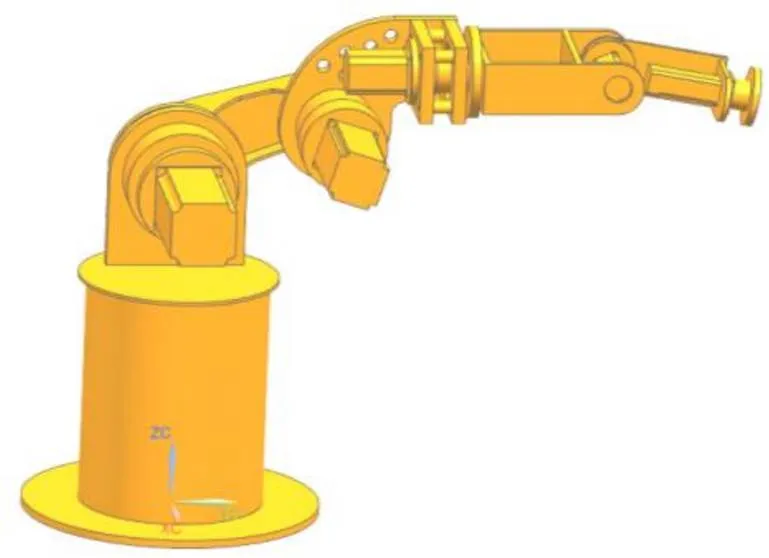
圖2 模塊化機械手的極限位置

表1 模塊化機械手材料參數表
1.3 相互作用
模塊化機械手各軸之間是通過電動機和減速器進行連接的。在靜止狀態下,各軸之間的連接相當于剛性連接。在相互作用的模塊中設置為綁定約束[9]。
1.4 添加載荷和約束
模塊化機械手和地面的連接通過地腳螺栓進行固定,在設置約束時對底座下端進行完全固定。在模塊化機械手末端法蘭處施加焊槍自重(≈1 kg)。模塊化機械手其他各軸只受到自身重力的作用,沒有受到其他外部載荷,不需要施加載荷。
1.5 網格劃分
因模塊化機械手零部件較多,有的較復雜,所以在ABAQUS中采用“四面體”網格劃分[9]。
1.6 求解結果
從圖3可看出,模塊化機械手極限位置姿態應變最大發生在第2軸和第3軸的連接部件(大臂)。

圖3 積分點應變云圖
從圖5可看出,最大的變形量是在第6軸末端法蘭處,值為0.17 mm。和前文分析末端執行器處(焊槍處)是變形量最大的位置相吻合。本臺模塊化機械手是用于焊接,由于自重而出現的最大變形量符合工程要求。
綜合上述分析可得出:模塊化機械手靜力學分析結果符合工作性質要求,不需要增加強度和剛度。
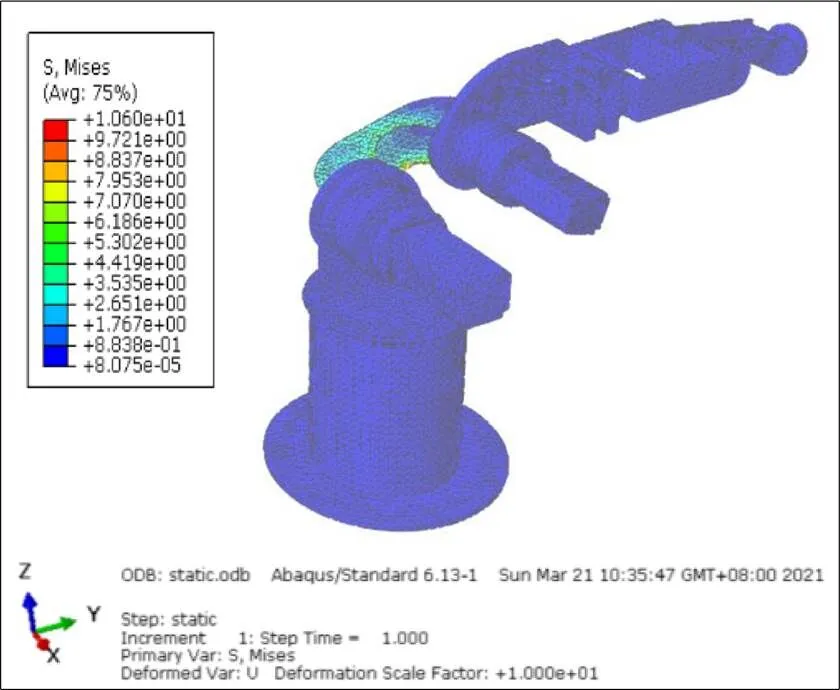
圖4 彈性應力云圖
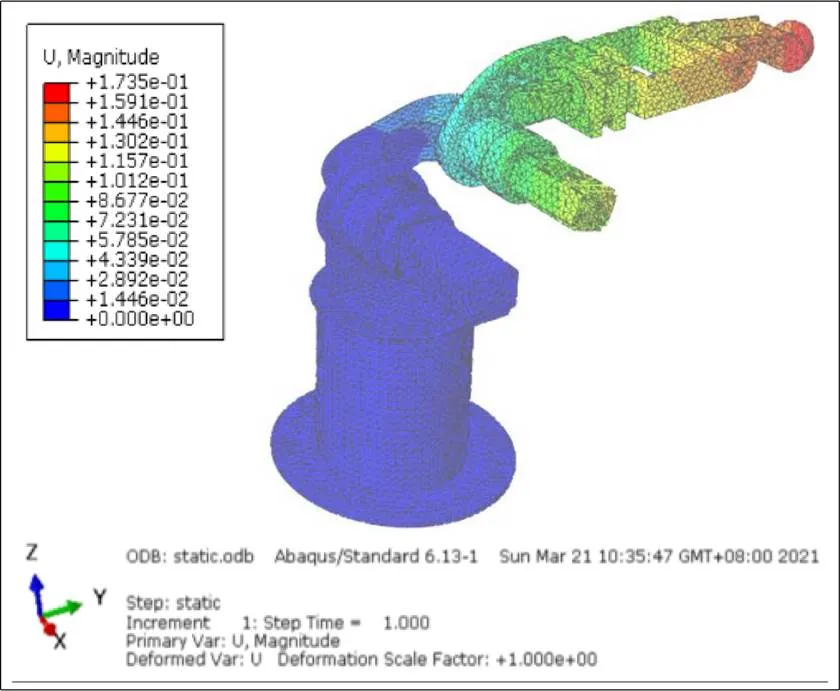
圖5 空間位移云圖
2 模塊化機械手模態分析
焊接過程中,模塊化機械手在某些位置出現大幅度抖動現象。要找出大幅度抖動的原因,就要對模塊化機械手進行動力學分析。現利用ABAQUS對模塊化機械手進行模態分析,求出其固有頻率和相應振型。
2.1 理論基礎
模態分析的任務是求出結構系統各階模態參數,譬如系統的固有頻率和振型、模態質量、模態剛度、模態阻尼等。由彈性力學可以得到結構系統的有限元方程為:

在進行模態分析時,假設結構是不受外力作用的自由振動系統,則自由振動方程為:

由于阻尼對結構的固有頻率的振型影響不大,所以可以忽略阻尼的影響,則無阻尼自由振動方程為:

假設結構作簡諧振動,則式(3)的解可以設為:

現代市場營銷模式把消費者的利益和需求放在首要位置,這是市場營銷的一場巨大變革。很多企業在企劃市場營銷之前,都要對消費者的消費需求和消費欲望與市場行情進行客觀、詳細的深入了解。其次,企業要針對自身的產品對行業內部的市場飽和程度進行調研,準確針對自身的產品進行市場定位,結合企業自身的情況和未來發展的方向,對潛在的消費者、市場、客戶進行精準的定位。在完成這一系列的前期轉化工作之后,企業集中所有的人力、物力、財力制定出準確的市場營銷計劃和方案,很好地落實到實踐中去,實現社會、消費者和企業三方共贏的良好發展趨勢。
結合式(3)和式(4),可得:

求解式(4)、式(5)就可以得出結構的固有頻率和相應的振型[10-11]。
2.2 模態分析
由于模塊化機械手的結構姿態是隨著各軸轉動而發生改變的,所以其在各種姿態下的固有頻率和相應振型會有所差異[11-12]。為了得到與本文研究有關的數據,在現場記錄模塊化機械手出現大幅度抖動現象的各種姿態。本文選擇具有代表性的姿態進行模態分析。
結合現場分析,模塊化機械手的動力主要由6個軸的伺服電動機通過減速器提供。模塊化機械手在焊接過程中,移動速度比較緩慢,現場外部激勵輸入頻率也相應較低,所以只需研究模塊化機械手的低階模態。本文分析模塊化機械手前8階的固有頻率和相應振型。
在ABAQUS中對模塊化機械手進行模態分析時,前面的操作步驟和靜力學分析的操作步驟基本一致,主要區別是模態分析的“分析步”需選擇“線性攝動分析步”→“頻率”,設置相關參數[9]。模態分析結果如圖6、圖7所示,其前8階固有頻率歸納如表2所示。
從表2可以看出,模塊化機械手的前8階固有頻率為30.870~260.06 Hz,每階固有頻率值之間比較接近,特別是前3階。
從圖6、圖7可以看出,模塊化機械手前8階的振型主要表現在第4軸、第5軸和第6軸上。計算出的固有頻率和相應振型為下一步結構優化提供了依據。

表2 模塊化機械手的各階固有頻率
3 模塊化機械手結構優化
3.1 分析及優化方案
經過現場分析,模塊化機械手輸入激勵主要是來自6個軸伺服電動機通過減速器輸入的轉頻。模塊化機械手6個軸的伺服電動機的最高工作轉速為3000 r/min。第1~3軸為RV減速器,減速比為120。第4~6軸為諧波減速器,最小減速比出現在第5和第6軸,減速比為103,兩個軸減速器輸入轉速為29.13 r/min。經過計算,模塊化機械手其他軸輸出的轉頻都比這兩個軸低,即遠離模塊化機械手結構第1階固有頻率(1=30.870 Hz)。根據模塊化機械手的激勵輸入,再結合模塊化機械手有限元分析前8階固有頻率來看,整個機械手結構系統的第1階模態比較容易出現[10],所以本文只研究第5和第6軸的轉頻即可。
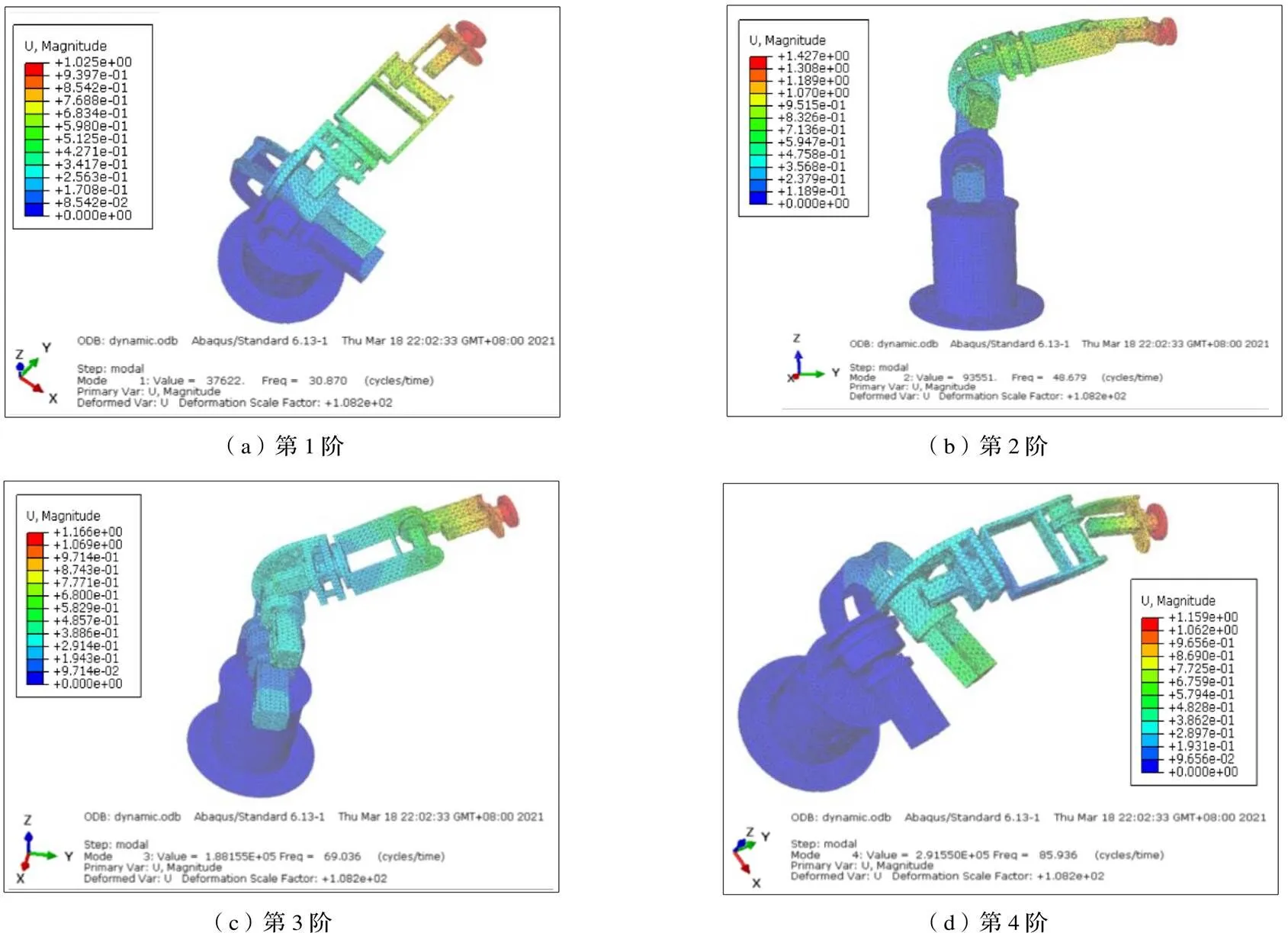
圖6 模塊化機械手的前4階振型圖
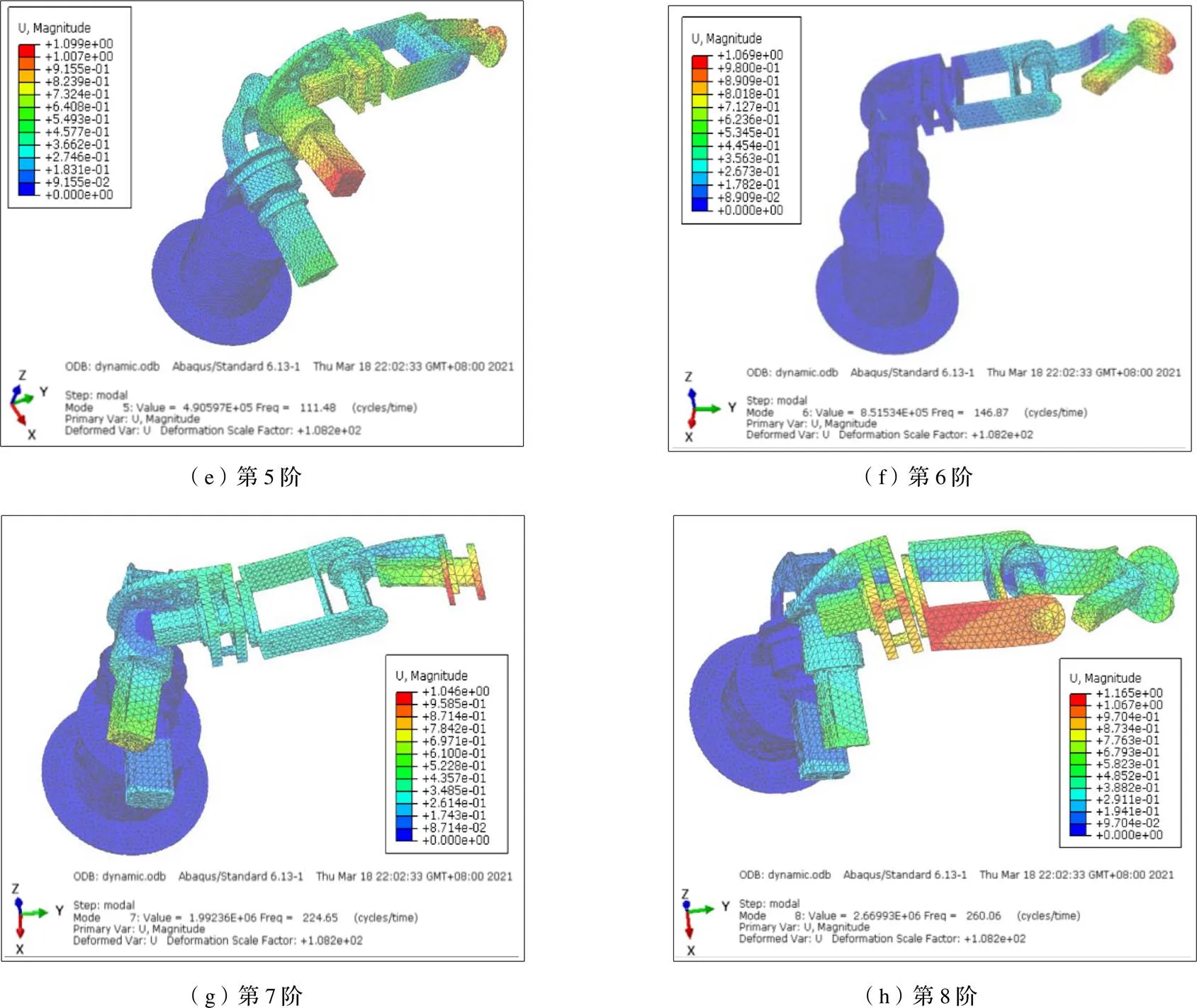
圖7 模塊化機械手的5~8階振型圖
由于第5和第6軸減速器的轉頻接近模塊化機械手結構的第1階固有頻率,所以容易引起模塊化機械手共振。通過對模塊化機械手低階振型和現場的觀察,振動主要出現在第4~6軸處。目前,第6軸的電機只連接有一塊鋁板,可以在該位置上進行優化。在原來的基礎上加一塊鋁板進行加固,使結構更結實,最重要的是能提高第1階的固有頻率。
3.2 驗證優化方案
模塊化機械手優化后,再利用ABAQUS進行模態分析。根據前面分析可知,主要振動是低階引起的,所以只算出模塊化機械手的前4階固有頻率和相應振型,如表3、圖8所示。
模塊化機械手的第1階固有頻率為36.033 Hz,比原來提高了16.72%,更加遠離第5和第6軸減速器的轉頻,同時第6軸的結構強度也得到了提高。

表3 優化后模塊化機械手的前4階固有頻率
4 結論
對模塊化機械手進行靜力學分析,模塊化機械手在極限位置時,各軸部件應力值遠小于材料的許用應力值,滿足強度要求。第6軸連接法蘭處的變形量最大,值為0.17 mm。本臺模塊化機械手是用于焊接,該最大變形量符合工作性質要求。通過對模塊化機械手進行模態分析,得出其固有頻率和相應振型。伺服電動機工作的最高轉速為3000 r/min,第5和第6軸減速器的減速比為103,減速機輸出轉頻為29.13 r/min,該轉頻接近模塊化機械手結構的第1階固有頻率,容易引起共振。對第6軸的結構進行優化,驗證結果表明:優化后模塊化機械手第1階固有頻率提高了16.72%,避開了減速器的輸入轉頻,防止共振。同時第6軸的結構強度也得到了提高。本研究為模塊化機械手結構優化提供了理論依據。
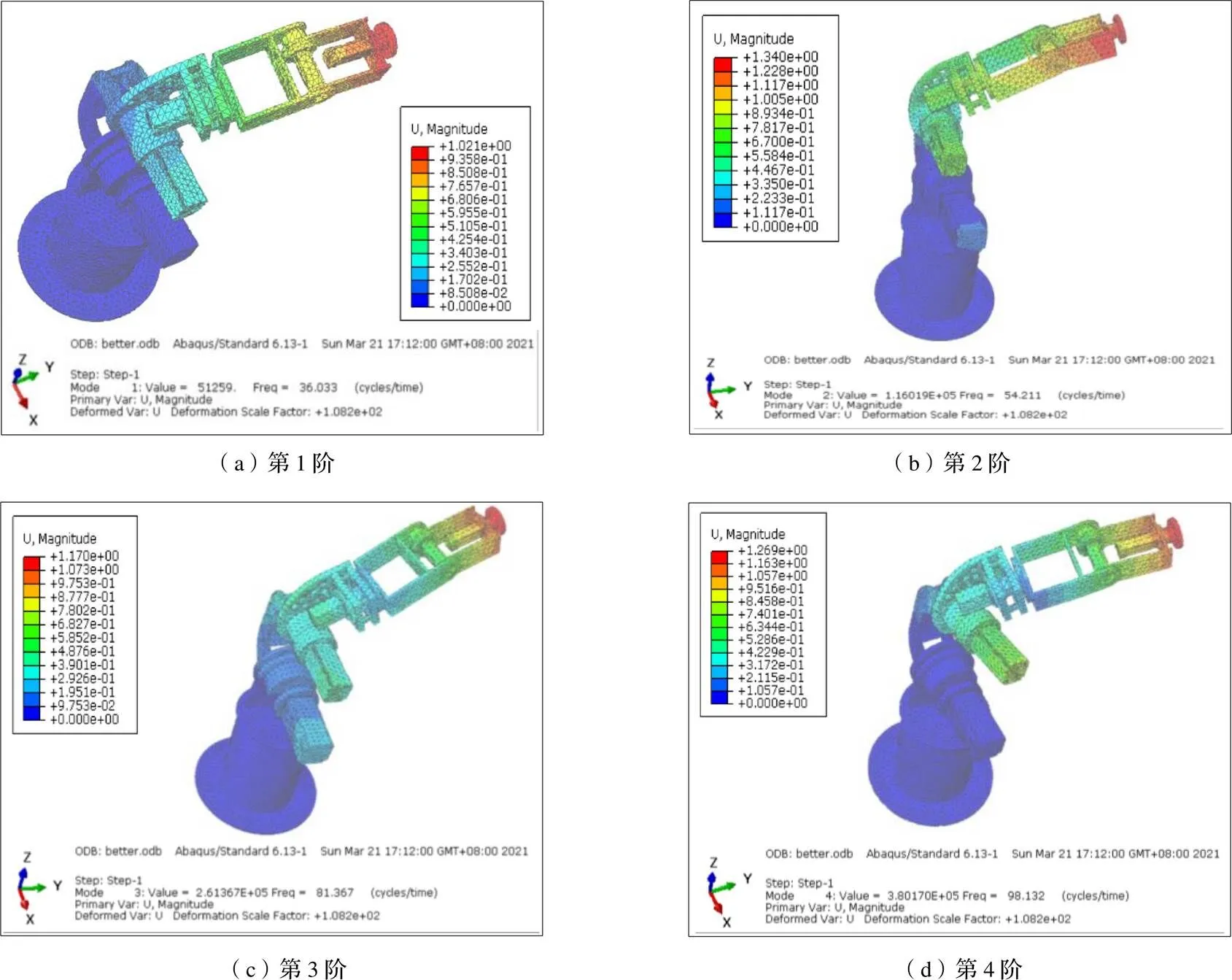
圖8 優化后模塊化機械手的前4階振型圖
[1]蘭虎,鄂世舉. 工業機器人技術及應用[M]. 北京:機械工業出版社,2019:5-29.
[2]胡義華. 抓取機械手的動力學性能及結構有限元仿真[J]. 濟南大學學報(自然科學版),2021,35(5):508-512.
[3]陳彥宇,田東莊,許翠華,等. 基于Abaqus桁架機械手動靜態性能分析[J]. 煤礦機械,2017,38(11):58-60.
[4]崔書婉,韋建軍. 焊接機器人的有限元分析與結構優化[J]. 制造業自動化,2014,36(20):67-70.
[5]趙軍,殷鳴,趙秀粉,等. 基于UG的驅動橋殼動靜態性能有限元分析與優化設計[J]. 機械,2017,44(1):5-10,50.
[6]吳凱佳,蘇小平. 某工程車輛車架的結構動力學分析與優化[J]. 南京工業大學學報(自然科學版),2019,41(6):688-694.
[7]曹巖,沈冰,程文. ABAQUS 6. 14中文版有限元分析與實例詳解[M]. 北京:清華大學出版社,2018.
[8]肖智勇,段建中,杜鑫強,等. Motoman工業機器人有限元靜態分析及改進設計[J]. 長沙理工大學學報,2011(12):71-75.
[9]CAD/CAM/CAE技術聯盟. ABAQUS 2016 有限元分析從入門到精通[M]. 北京:機械工業出版社,2017.
[10]李德葆. 振動模態分析及其應用[M]. 北京:宇航出版社,1989.
[11]汪永元. 工業機器人的系統分析與仿真研究[D]. 成都:西南交通大學,2014.
[12]陳祝權,梁曉合,林粵科,等. 六自由度串聯機器人結構設計及有限元分析優化[J]. 機床與液壓,2013,41(23):97-101.
Dynamic and Static Analysis and Structural Optimization of Modular Manipulator Based on ABAQUS
WANG Wenjun,LI Fusong,LIN Weijian
(College of Mechanical Engineering, Liuzhou Institute of Technology, Liuzhou 545000,China)
Large vibration of modular manipulator in some positions of welding process affects the precision and quality of welding. The modular manipulator is carried out static and dynamic analysis. Firstly, UG NX 12.0 is used to model the modular manipulator. Secondly, ABAQUS is used to carry out static analysis and modal analysis of the modular manipulator. The results of static analysis show that the structural stiffness and strength of the manipulator meet the requirements of working performance. The modal analysis show that the first natural frequency of the modular manipulator (1=30.870 Hz ) is very close to the input minimum frequency of reducer (29.13 r/min). It is easy to occur to resonance for the modular manipulator. The verification analysis is carried out for the optimization of the sixth axis of the modular manipulator. It shows that the first natural frequency of the modular manipulator is 36.033 Hz which 16.72% higher than the original one. It is far away from the input frequency of the reducer and avoids resonance. This study provides a theoretical basis for the improvement of modular manipulator.
modular manipulator;ABAQUS;natural frequency;resonance;structural optimization
TP241;TH113
A
10.3969/j.issn.1006-0316.2021.09.010
1006-0316 (2021) 09-0067-07
2021-03-25
廣西高校中青年教師科研基礎能力提升項目(2019KY1104)
王文軍(1982-),男,廣西田陽人,碩士,工程師,主要研究方向為機械結構設計、機械振動與測試技術,E-mail:39628608@qq.com。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
現代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:50
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
