
基于譜峰斜率進行變步長搜索的DOA估計方法
2021-09-28 06:32:06樊文倩
測控技術 2021年9期
樊文倩,李 艦
(西北大學 信息科技與技術學院,陜西 西安 710127)
波達方向(Direction of Arrival,DOA)估計[1-2]是對傳感器陣列接收的數據進行分析處理,估計目標的方位或俯仰信息,是雷達、聲納、無線通信等領域的關鍵技術[3-4]。作為高分辨DOA估計的經典方法,Capon算法[5-6]通過固定步長的譜峰進行窮盡搜索,獲得目標的角度信息[5-7]。該方法存在計算量和存儲量龐大、運行時間長、實時性差的問題[8-9]。通常情況下,固定步長[10-11]難以協調計算量和收斂速度之間的內在矛盾。大步長可以簡化計算復雜度,但難以獲得高的估計精度,小步長增加了計算負擔,卻有利于提高分辨性能。變步長算法通常包含大步長的粗搜索和小步長的精搜索過程,可較好地平衡收斂速度和估計精度。
文獻[12]深入研究了變步長理論,在低信噪比的微弱信號和大誤差復雜場景下,提出一種改進的變步長最小均方算法,提出了步長因子和誤差之間的函數關系,使步長因子對時變系統具備跟蹤能力,該自適應算法對干擾濾除效果十分顯著。文獻[13]提出一種分級迭代變步長算法,很好地解決了收斂速度與穩態誤差之間的矛盾,該算法對盲源分離具有更穩更快的分離速度和穩態性能。
本文提出了一種低復雜度、變步長的搜索算法,首次搜索使用大步長的Capon算法進行搜索,根據譜峰首次搜索結果確定DOA檢測范圍,并求出該范圍內的斜率值,根據斜率值首次小于零確定譜峰在其左側,記斜率小于零點為P,所以取該斜率對應范圍的左值,同時向左取P-2點,并從P-2點處開始向右進行變步長搜索,根據上一步的步長x=1,選取步長函數進行變步長的迭代逼近搜索,并計算每個步長對應的譜峰函數的斜率值Ki,直到斜率值首次小于零,并取斜率值小于零的區間的左值,作為本次期望信號的估計角度DOA。
1 數據模型及Capon算法
空間中L個窄帶信號,同時入射到M個半波長的均勻線性陣列,陣元間d=λ/2,P個遠場窄帶信號以λ為波長入射到陣列,設各通道獨立且附加加性高斯白噪聲(AWGN),定義DOA為信號來向與陣列法線的夾角θ,以第一個陣元為參考點,在第t次快拍下陣元m(m=1,2,…,M)接收的P個信源的總響應表示為
(1)
式中,Sp為第P個信源的復包絡;nm為第m個陣元上的噪聲,則陣列一次快拍的接收數據也可表示為
x(t)=A(θ)S(t)+n(t)
(2)
式中,x(t)為M×I維的接收數據向量;S(t)為L×I維的信號向量;n(t)為M×I維的加性高斯白噪聲向量;A(θ)為M×L維導向矢量矩陣,導向矢量a(θl)定義為
a(θl)=[ejx1wl,ejx2wl,ejx3wl,…,ejxMwl]T
(3)
式中,ωl=2πsinθl/λ為第l個陣元接收信號的角頻率;λ為信號的中心波長;xi(i=1,2,…,M)為第i個陣元的坐標,陣列輸出的協方差矩陣表示為
(4)

(5)
式中,a(φ)為期望信號的方向;R-1為R矩陣的逆矩陣。
2 本文提出的算法
假設空間有L個窄帶信號,同時入射到M個半波長的均勻線性陣列,陣元間d=λ/2,P個遠場窄帶信號以θ=[θ1,θ2,…,θp]入射到陣列,入射波長為λ,設各通道獨立且附加的噪聲是加性高斯白噪聲,定義DOA為信號來向與陣列法線的夾角θ。經典Capon超分辨DOA估計方法采用固定步長進行譜峰窮盡搜索,存在計算量和存儲量龐大、運行時間長、精準度不高的問題。
所提算法的具體實現步驟如下。
① 利用經典的Capon算法,先使用大步長的均勻搜索方法,根據Capon算法的譜峰公式[9]
粗略地估計出譜峰值的范圍,并截取該范圍,利用斜率公式
求出截取范圍內的譜峰斜率值Ki。式中,jdpf(i+1)為第i+1個點的角度譜峰值;jdpf(i)為第i個點的角度譜峰值。
② 根據上一步求得斜率值,找出截取范圍內斜率首次小于零對應區間的左值P,由于譜峰值在P點左側,所以向左取值P-2,并從P-2處開始向右進行變步長搜索。
3 仿真分析
3.1 仿真條件
本文的所有仿真實驗均是在裝有Inter?CoreTM2 Duo CPU E8400@3.00 GHz和6.00 GB的RAM,MatlabR2018ade PC機上實現的,本文提出的算法屬于初期的理論階段,因此所有的數據均采用理想的、假設的數據來進行驗證。
在Matlab中進行大量的仿真實驗,分別從RMSE、算法復雜度和分辨成功率這3個方面對所提算法進行性能評價。假設陣列天線為18陣元的均勻線性陣列,陣元間距為半波長,期望信號的來波方向是36.7°。均勻線陣所加載的誤差均值為零,方差為正態分布的隨機值,并且每個陣元的誤差單獨加載,針對每種變量進行試驗,每次采用100次Monte Carlo獨立實驗的平均結果,將其均方根誤差作為評估陣列數據處理誤差對算法性能影響的依據。
3.2 改進算法的仿真實驗
在仿真實驗中,假設有18個均勻線性排列的陣元,陣元間距為λ/2,信號之間相互獨立,信噪比為-6,期望信號的來波方向為36.7°。
第1步:用bc表示步長,取bc=5,采用經典的Capon算法在[1°,90°]間進行譜峰粗搜索,仿真結果如圖1所示,得到粗略的譜峰范圍為[30°,40°],截取譜峰范圍[30°,40°],并求出該范圍內每個點對應的斜率值,仿真結果如圖2所示。
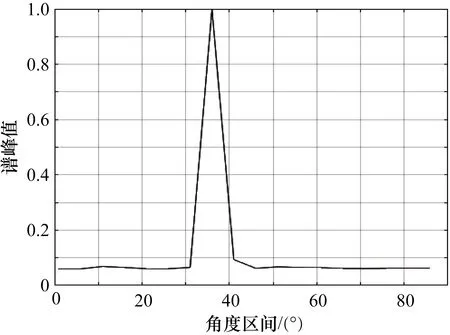
圖1 步長為5 的譜峰粗搜索
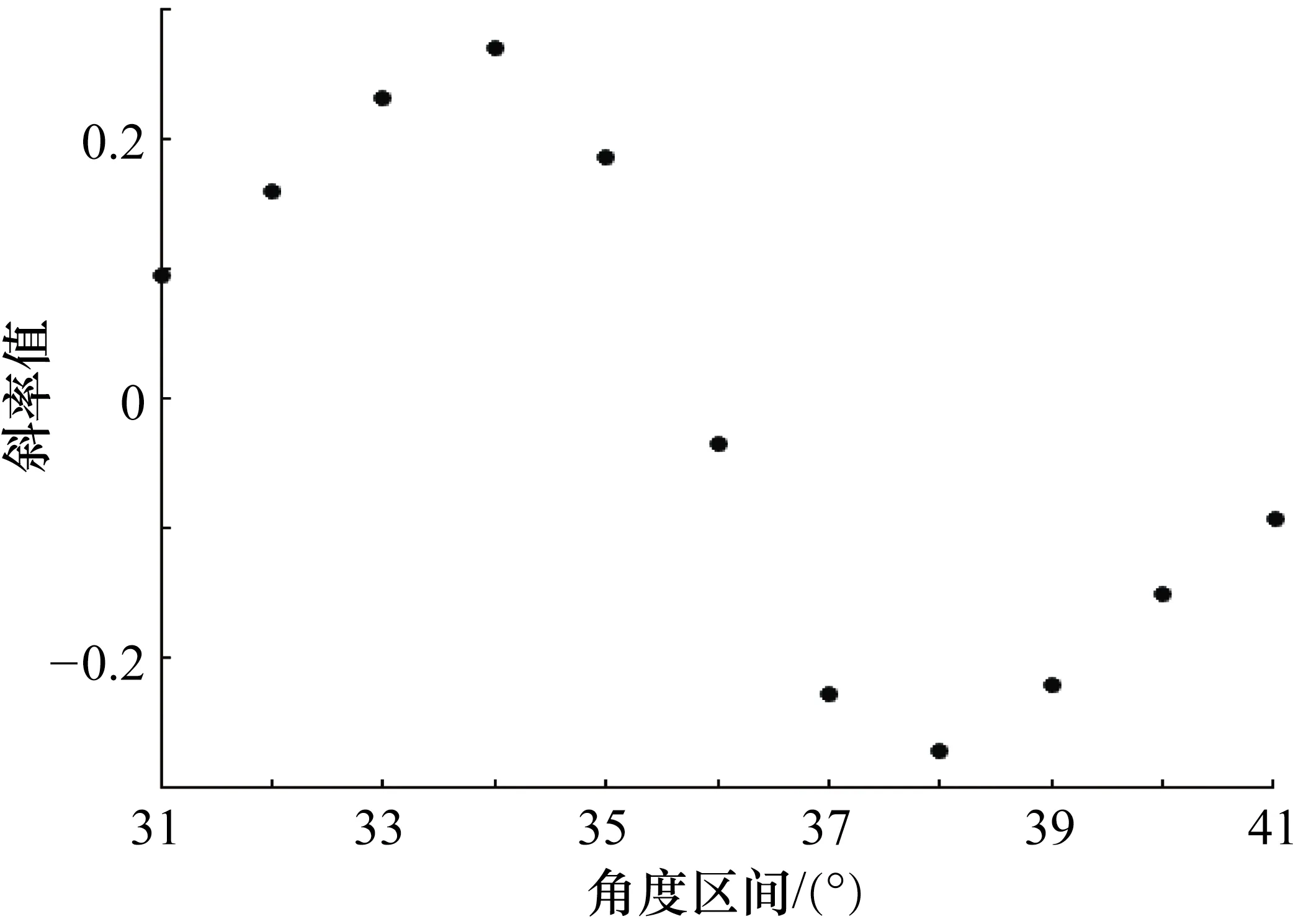
圖2 31°~41°間譜峰斜率值
第2步:根據斜率值首次小于零的左側為譜峰的特點,找到斜率值首次小于零的區間的左值37,同時再向左取值35,并從點35處開始向右進行變步長的譜峰搜索。
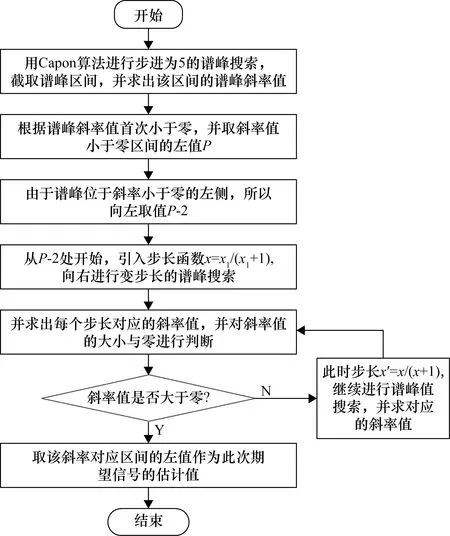
圖3 算法流程圖
3.3 RMSE的仿真結果

(6)
圖4~圖6是兩種算法在改變信噪比、陣元數和快拍數的情況下的RMSE性能的實驗仿真圖。由仿真圖4~圖6可得,在信噪比、陣元數和快拍數改變的情況下,所提算法的RMSE更小,更接近期望信號角度。
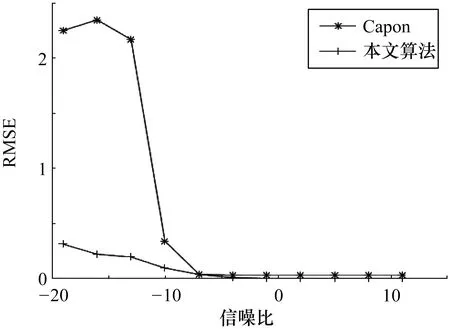
圖4 不同信噪比對RMSE的影響
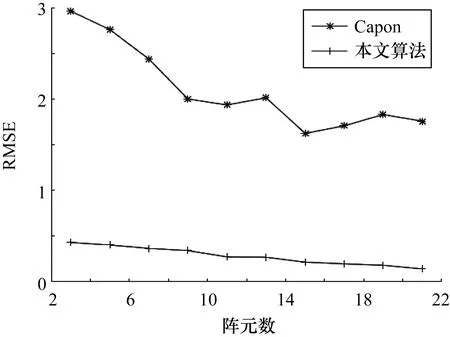
圖5 不同陣元數對RMSE的影響
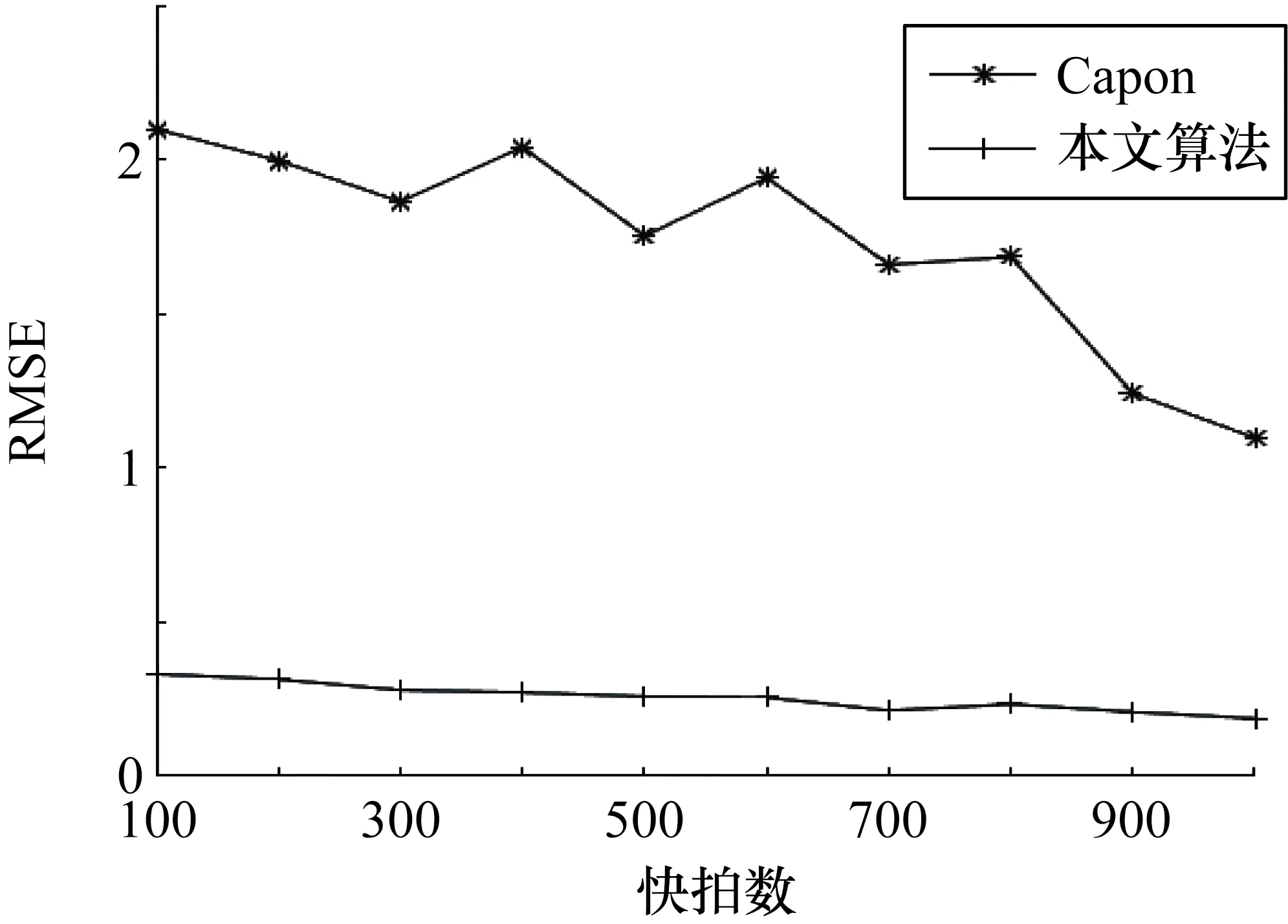
圖6 不同快拍數對RMSE的影響
3.4 算法的復雜度
通過算法復雜度分析本文所提算法性能,首先提出兩個關于衡量算法復雜度的性能指標:① 時間復雜度,指執行算法所需要的運行時間[15];② 運算復雜度,指程序里所包含的加減乘除、轉置及求正弦等次數的和。本次實驗通過比較所提算法和Capon算法的運行時間和RMSE來衡量兩種算法的復雜度。實驗結果如表1和表2所示。
從表1、表2中得知,在一定條件下,所提算法在運行時間上并沒有節省,而精度平均值是取10次RMSE的平均值來衡量的,因此在精度的準確性上精確了近9倍,計算過程如下:
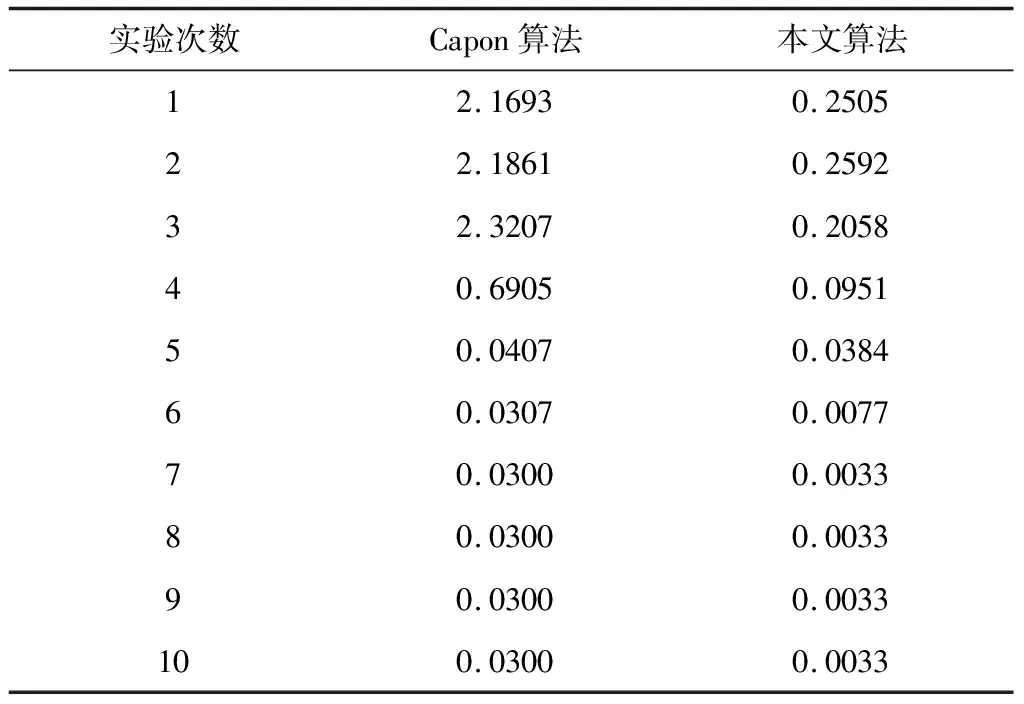
表1 兩種算法運行10次的RMSE 單位:(°)
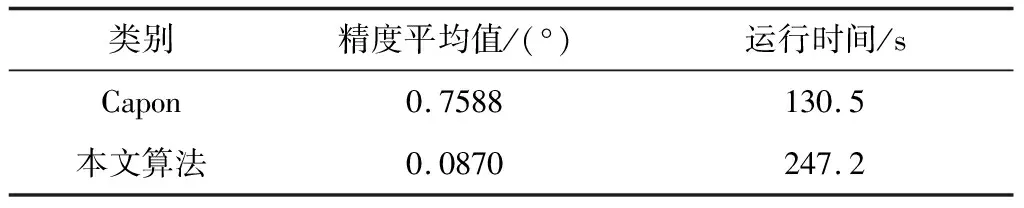
表2 兩種算法RMSE的平均值和運行時間
本文所提算法的最大貢獻就是準確度的提高,通過比較兩個算法的RMSE來進行衡量,傳統的Capon算法的平均RMSE為0.7588°,而本文提出通過引入步長函數,進行變步長的譜峰值搜索的方法求得的RMSE為0.0870°,所以相對原有的算法,本文所提算法在精度的準確性上精準了近9倍。而精度是通過比較兩個算法多次運行的RMSE來進行比較的。傳統的Capon算法的一次運行時間為130.5 s,而本文提出的方法進行譜峰搜索時一次運行時間為247.2 s,所以相對原有的算法本文所提算法在運行時間上并沒有節省,這也是所提算法的一個不足之處。
3.5 分辨成功率的仿真結果
分辨成功率(Probability of Resolution,PR)即在一定條件下,取一個誤差閾值,統計小于這個閾值的次數與總共實驗的次數的比例。設所允許的角度估計誤差門限值為▽θ,由于本次的實驗的期望角度為36.7°,精確到了小數點后一位,所以取▽θ=0.5,仿真結果如圖7所示,在Q次獨立實驗中N個DOA角度的估計值均滿足式(7)的實驗次數為Q1次,則PR=(Q1/Q),仿真結果如圖7所示。
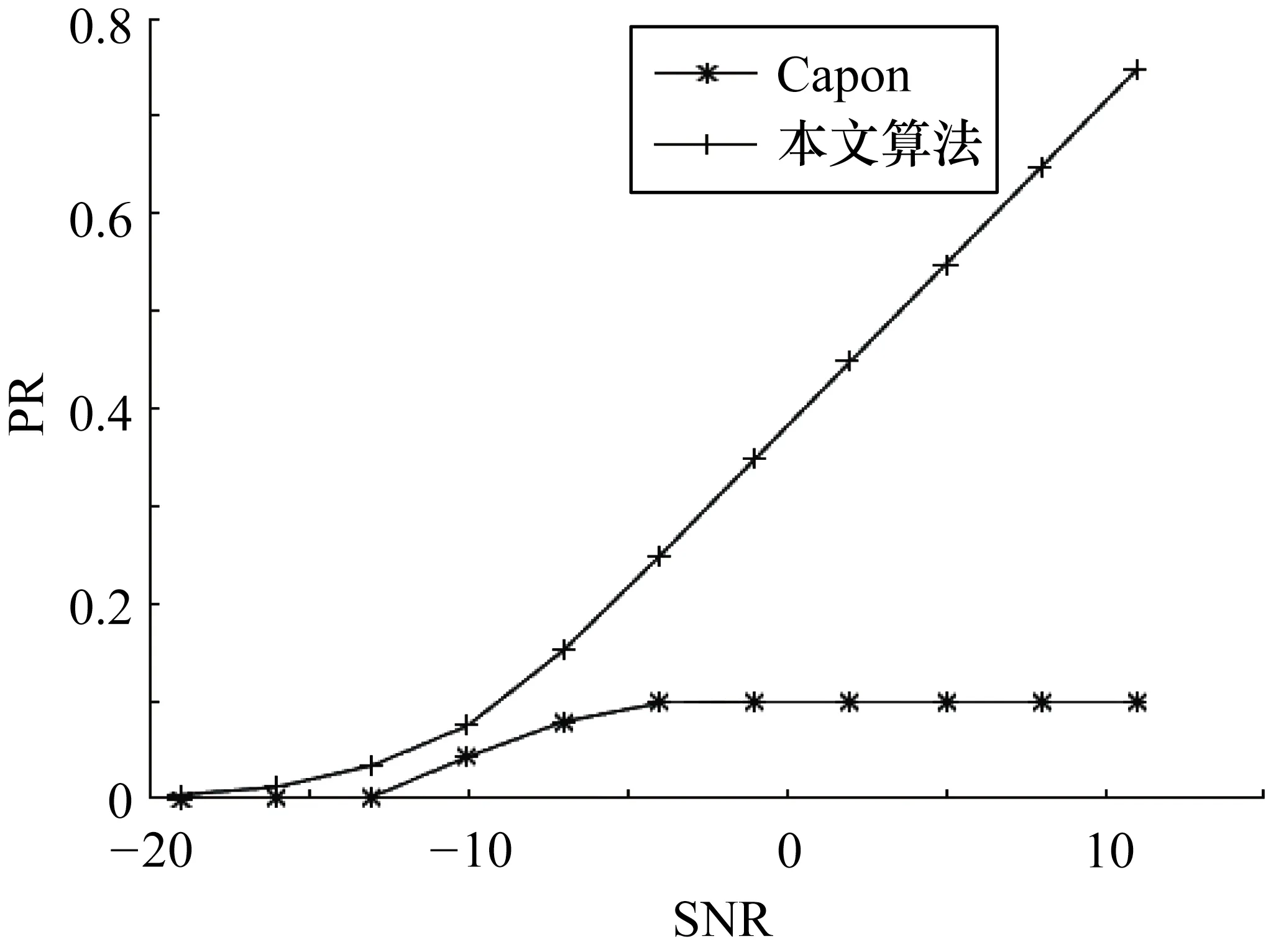
圖7 誤差門限為0.5時的PR
(7)
當估計的角度為兩個且兩角度相距很近,分別為θ1和θ2且譜峰函數f(·)取值滿足式(8),即認為θ1
和θ2分辨成功。同理存在多個信號時,且角度間相距很近時,記為θi(i=1,2,…,n)。
(8)
(9)
通過仿真圖7可得,估計一個角度時,所提算法的PR明顯優于傳統的Capon算法,當存在多個信號時,可以采用上述式(9)的方法。
4 結束語
本文所提算法采取簡單的方法快速估計出期望信號的角度,在準確度上相比傳統的Capon算法精準了近9倍,改善了定位的準確性,避免了窮盡的譜峰搜索。仿真實驗表明:在相同信噪比下,所提算法的分辨成功率更高;同時所提算法的RMSE在信噪比、快拍數和陣元數變化的情況下,均明顯優于經典的Capon算法,估計精度優于傳統的Capon算法,更接近于期望信號。
雖然本文所提算法檢測單次算法運行時間上高于傳統的Capon算法,但是降低了算法的估計誤差,減少了無效的譜峰搜索。因此本文所提算法通過引入步長函數,進行變步長迭代逼近搜索求斜率值的方法,求解出期望信號的DOA,避免了窮盡的譜峰搜索,更高效準確地估計出期望信號的DOA。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
