改進遺傳算法優化的礦井局部通風機模糊PID控制器設計
2021-09-28 07:20:20胡業林鄧想鄭曉亮
工礦自動化 2021年9期
關鍵詞:優化
胡業林, 鄧想, 鄭曉亮
(安徽理工大學 電氣與信息工程學院, 安徽 淮南 232001)
0 引言
煤礦用局部通風機是煤礦井下通風必不可少的安全設備,為了保證井下作業人員需氧量和瓦斯濃度不超限,局部通風機功率一般偏大且始終處于恒速運行狀態,造成大量電能浪費[1]。隨著變頻技術的發展,局部通風機變頻調速系統應運而生[2]。局部通風機變頻調速系統需要根據瓦斯涌出量和工作面人員數量等因素確定供風量,而瓦斯涌出量具有隨機性,使得局部通風機變頻調速系統具有非線性、時變性、多干擾的特點。傳統局部通風機變頻調速系統多采用固定參數的PID控制器,無法滿足時變通風機調速系統的控制要求,因此,多種智能算法被用于優化PID控制器。文獻[3]針對PID控制參數調整困難的問題,提出了一種粒子群優化PID控制算法,相比于傳統PID控制器,經過粒子群算法優化后的控制器對局部通風機轉速控制輸出性能改善明顯。文獻[4]針對礦井通風機控制系統的時變性,設計了模糊PID自適應控制系統,利用模糊算法對PID參數進行實時調整,實現了通風機轉速的自適應控制。文獻[5]針對模糊PID控制器中模糊規則的設定需要依賴人工經驗的問題,提出利用遺傳算法對模糊規則進行優化,提高了模糊PID控制器的控制效果。文獻[6]針對傳統模糊PID控制的許多參數需要結合實際情況進行調整、人為試錯確定的問題,提出采用遺傳算法對控制器的量化因子和比例因子進行優化,提高了控制器的精度和速度。文獻[7]分析了隸屬度函數與比例因子和量化因子的關系,并針對模糊PID控制存在人為確定隸屬度函數的問題,提出采用改進遺傳算法對隸屬度函數進行優化,結果表明優化后的控制器性能更優。但是上述控制器的隸屬度函數和模糊規則未能同時優化,剩余參數仍需根據經驗選取,很難實現隸屬度函數和模糊規則的最優組合。針對該問題,本文設計了一種改進遺傳算法優化的礦井局部通風機模糊PID控制器(以下簡稱改進模糊PID控制器),該控制器在模糊PID控制器的基礎上,利用改進遺傳算法同時優化隸屬度函數和模糊規則,從而實現局部通風機的最優風量控制。
1 改進模糊PID控制器設計
改進模糊PID控制器包括運算模塊、模糊PID控制器和基于改進遺傳算法的控制器優化部分,其結構如圖1所示。利用改進的遺傳算法同時優化模糊控制器的隸屬度函數和模糊規則,可有效避免模糊PID控制器參數設置的主觀性。利用傳感器實時采集的數據計算需風量的設定值r,實現r的自適應調整。將r和當前實際風量值q進行比較,計算得到兩者之間的偏差e和偏差變化率ec,將e和ec傳送至優化后的模糊PID控制器,控制器輸出控制電壓u,用以控制礦用隔爆變頻器,變頻器調節異步電動機轉速并經過風速轉換,最終實現風量的自適應調節。

圖1 改進模糊PID控制器結構Fig.1 Structure of improved fuzzy PID controller
1.1 運算模塊
運算環節由可編程邏輯控制器PLC內部的運算模塊實現,運算模塊根據傳感器采集到的工作面瓦斯涌出量w得到按瓦斯涌出量計算的需風量qw,qw和w成正比例關系。根據工作面人數g得到按工作面人數計算的需風量qg。比較qw和qg的大小,取兩者的較大值作為運算模塊的輸出。
qw=wκ/ν
(1)
式中:κ為瓦斯涌出不均衡系數;ν為回風流中瓦斯的允許濃度。
qg=qming
(2)
式中qmin為每個工作面人員的最小供風量。
通過輸出qw和qg中的較大值作為需風量的設定值,運算模塊能夠在保證工作面人員最小供風量的前提下,根據瓦斯涌出量自適應地調整需風量的設定值。利用優化后的模糊PID控制器良好的跟隨性能控制局部通風機,使實際風量跟隨需風量設定值的變化而變化,最終實現依據工作面瓦斯涌出量和人員數量自適應調整工作面風量的目的。
1.2 模糊PID控制器
模糊PID控制器包含1個模糊控制器和1個PID控制器。模糊控制器采用兩輸入、三輸出的Mamdani控制器,將實際值和目標值之間的偏差e和偏差變化率ec作為模糊控制器的輸入,PID參數的變化值ΔKp,ΔKi,ΔKd作為模糊控制器的輸出。將Kp,Ki,Kd參數輸入PID控制器,控制信號為u。在運行中通過不斷檢測e和ec,利用模糊控制器對PID控制器的3個參數進行實時修改,以滿足不同的e和ec對控制參數的要求。模糊PID控制器具有良好的魯棒性和動靜態性能,但在傳統情況下,控制器的參數均由人為主觀設定,極大限制了控制器的控制性能。
(3)
式中Kp0,Ki0,Kd0為PID的初始參數。
(4)
1.3 基于改進遺傳算法的控制器優化
在遺傳算法中,種群表示所有可能解的集合,種群中包含許多個體,每個個體表示一種可能解,個體中又包含多個基因,基因表示這個可能解的具體信息。將遺傳算法應用到模糊PID控制器參數優化中,首先需要根據隸屬度函數和模糊規則的特點,利用特殊的編碼方式,將二者的具體信息編碼成個體中的基因;然后利用改進遺傳操作對個體進行迭代尋優,迭代結束后輸出種群中適應度最高的個體;最后將該個體的基因通過解碼即可得到隸屬度函數和模糊規則的最優組合。改進遺傳算法優化隸屬度函數和模糊規則的流程如圖2所示。
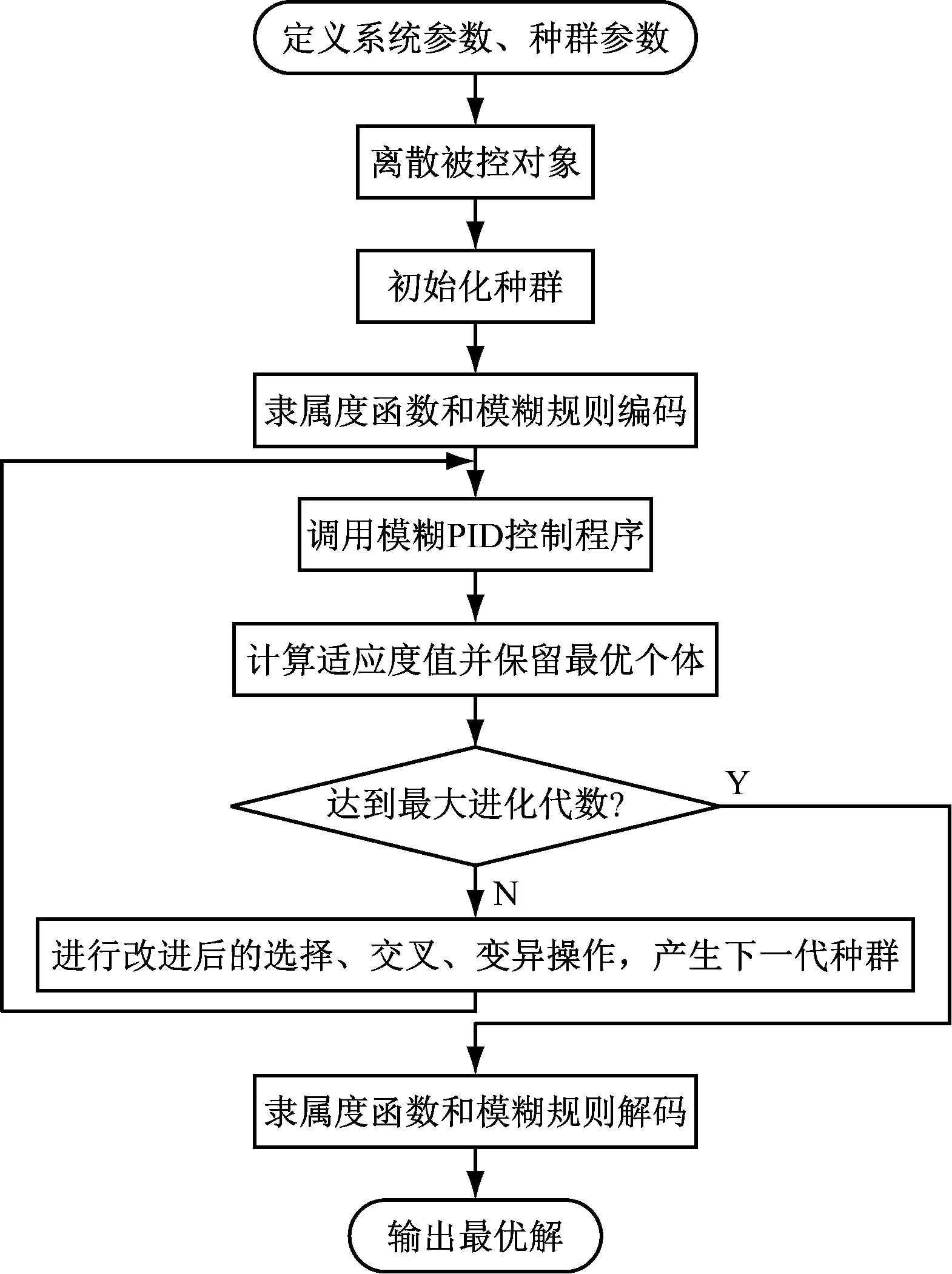
圖2 改進遺傳算法優化模糊PID控制器流程Fig.2 Flow of fuzzy PID controller optimized by improved genetic algorithm
1.3.1 初始化種群
在進行遺傳操作前,需要先設置初始種群。為了實現全局搜索,本文選用隨機方式產生初始種群。為了便于后續的編碼操作,種群中的基因變化范圍設置為[1,5]。
1.3.2 隸屬度函數和模糊規則的編碼與解碼
常用的編碼方式有二進制編碼和實數編碼,其中實數編碼過程簡單且不易陷入局部極值[8]。因此,本文選用實數編碼形式對模糊規則和隸屬度函數進行編碼。對模糊規則進行編碼時,設模糊子集為{負大,負小,零,正小,正大},即{NB,NS,Z,PS,PB},使用{1 2 3 4 5}表示。對隸屬度函數進行編碼時,基本論域設置為[-1,1]。模糊子集NS、Z、PS選用三角形隸屬度函數,NB選用Z形隸屬度函數,PB選用S形隸屬度函數。為了便于編碼,設隸屬度函數的頂點和兩側隸屬度函數交點的橫坐標一致[9]。因此,只需確定隸屬度函數的頂點坐標就可以確定整個隸屬度函數的形狀。由于隸屬度函數的頂點坐標要求在一定范圍內且順序排列,若直接對其進行編碼,經過遺傳操作后可能無法滿足上述要求,會出現許多無效編碼。本文采用的方法是對隸屬度函數頂點的橫坐標在基本論域上的比例分數進行編碼,比例分數無需滿足范圍內順序排列的要求,可以與模糊規則的編碼一起進行遺傳操作。
由于4個基因可以確定1個變量的隸屬度函數,模糊控制器一共有5個變量,即需要20個基因可以確定全部的隸屬度函數。而每個模糊控制器的輸出需要25條模糊規則,一共有3個輸出,即需要75個基因可以確定全部的模糊規則。因此,每個個體應包含95個基因。個體的編碼示例如圖3所示,前20位基因表示隸屬度函數編碼,后75位基因表示模糊規則編碼。

圖3 個體編碼示例Fig.3 Example of individual coding
經過遺傳操作,最優個體后75位基因利用對應關系即可解碼成相應的模糊規則,而前20個基因需要將比例分數轉換成隸屬度函數頂點的位置坐標后才能解碼出相應的隸屬度函數。
(5)
式中:α,β為正半軸的隸屬度函數頂點的橫坐標值;xα,xβ為α,β對應的比例分數。
以誤差e的隸屬度函數為例具體說明轉換過程,誤差e的隸屬度函數如圖4所示,a,b,c,d為隸屬度函數的4個頂點橫坐標值,且0≤a≤b≤1,-1≤d≤c≤0。x1,x2,x3,x4為誤差e的隸屬度函數的比例分數。將x1,x2代入式(5)得到隸屬度函數的頂點橫坐標值a,b,將x3,x4代入式(5)計算得到的結果添加負號,即可得到隸屬度函數的頂點橫坐標值c,d,得到4個頂點橫坐標值后,即可解碼出誤差e的隸屬度函數。

圖4 誤差e的隸屬度函數Fig.4 Membership function of error e
1.3.3 適應度函數選擇
個體適應度是遺傳操作的基礎,直接影響到算法的效果。本文采用設定值和實際值的誤差e(t)的絕對值的積分作為目標函數。

(6)
由于誤差絕對值的積分值越小表示適應度越好,所以,適應度函數描述為
(7)
為減少浮點數運算,將適應度值放大1 000倍。
1.3.4 改進的遺傳操作
為了提高種群的適應度和多樣性,對選擇操作進行改進,引入歐氏距離[10]:
(8)
式中:ηi為個體η的第i個基因;θi為個體θ的第i個基因;n為基因個數。
歐氏距離越大表示個體η和個體θ的相似度越小。選擇操作步驟如下:
(1) 計算種群中每個個體的適應度值和種群平均適應度值,記錄最高適應度值及其個體。
(2) 逐個判斷種群中個體的適應度值是否小于平均適應度值,若是,轉到步驟(3),否則保存個體,直至判斷完整個種群。
(3) 隨機產生m個個體,分別計算這m個個體的適應度值與原種群中最高適應度值個體之間的歐氏距離,選擇適應度值與歐氏距離之和最大的個體作為新的個體,取代種群中原有的個體。
交叉操作采用自適應交叉概率,根據當代種群中的平均適應度值Favr和最大適應度值Fmax對交叉概率p1進行自適應調整[11]。
(9)
式中:k1為交叉概率設定值;Fj為個體j的適應度值。
確定交叉概率p1后,按照交叉概率在種群中選擇個體進行交叉運算。由于本文使用的是實數編碼,所以使用算術交叉算子進行交叉運算[12]。
(10)
式中:Cη,Cθ為從種群中選擇的2個父代個體;Cη+1,Cθ+1為經過交叉操作后產生的新的子代個體;ε為(0,1)內隨機產生的系數。
變異操作采用自適應的變異概率p2,其形式和式(9)一致。同時由于是利用實數編碼,采用算術變異算子進行變異運算。如對個體的第i個基因進行變異[13],其公式如下:
(11)

2 仿真分析
2.1 局部通風機控制模型建立
在進行仿真分析之前,需要先建立局部通風機的控制模型。在局部通風機控制系統中,通過控制變頻器輸入電壓實現電動機轉速調節,再經過電動機轉速和風速的轉換,最終實現局部通風機風速的調節。因此,可以使用變頻器和異步電動機來近似等效局部通風機的結構。
變頻器輸入電壓和輸出頻率之間的數學模型可以近似等效為一階慣性環節,其傳遞函數為[14]
(12)
式中:KUF為變頻器的輸出頻率和輸入電壓的比值;TUF為變頻器時間常數,一般取變頻器加速時間的60%;s代表復頻域。
異步電動機輸入頻率和輸出轉速之間的數學模型可以近似等效為一階慣性環節,其傳遞函數為[14]
(13)
式中:KMA為異步電動機額定轉速與工頻的比值;TMA為異步電動機時間常數,一般取電動機啟動時間的25%。
以FBD-No7.1型礦用隔爆型對旋軸流局部通風機為研究對象,通風機參數見表1。取變頻器最大輸入電壓為5 V,輸出頻率為20~50 Hz,加速時間為0.3 s。異步電動機啟動時間為2.4 s。由式(12)、式(13)可得到變頻器數學模型和異步電動機數學模型分別為
(14)
(15)
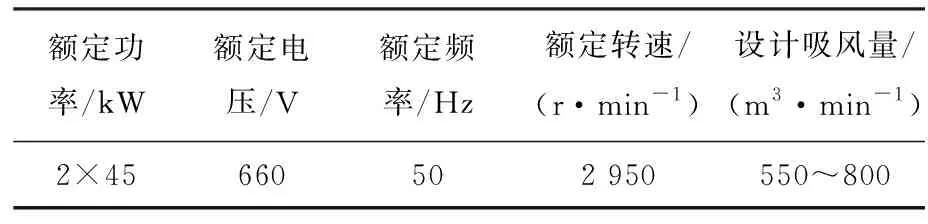
表1 FBD-No7.1局部通風機參數Table 1 Parameters of FBD-No7.1 local ventilator
由式(14)、式(15)得到局部通風機轉速控制數學模型為
(16)
建立局部通風機轉速控制的數學模型后,要實現局部通風機風量的調節,還需要進行轉速和風量的轉換。根據通風機的特性可知,轉速和風量之間滿足正比例關系[15]。依據局部通風機參數,通風機的轉速和風量轉換關系式為
(17)
式中:q為通風機風量;qe為通風機額定風量;ze為通風機額定轉速;zv為通風機轉速。
2.2 仿真分析
為驗證改進模糊PID控制器的控制性能,選用礦井局部通風機的數學模型作為控制對象,分別采用PID、模糊PID和改進遺傳算法優化后的模糊PID三種控制方式,對比三者的單位階躍響應曲線,分析3種控制器的控制性能。
設遺傳代數為100,種群大小為20,交叉概率系數kc為1,變異概率系數km為0.5,傳遞函數的采樣時間為0.1 s。遺傳進化過程目標函數J的變化曲線如圖5所示。從圖5可看出,標準遺傳算法SGA(Standard Genetic Algorithm)在67代達到收斂。而由于提高了種群的多樣性和算法的收斂性,改進遺傳算法IGA(Improved Genetic Algorithm)在第10代就達到收斂且收斂數值要小于SGA的收斂數值,IGA收斂速度更快并且尋優結果更好。
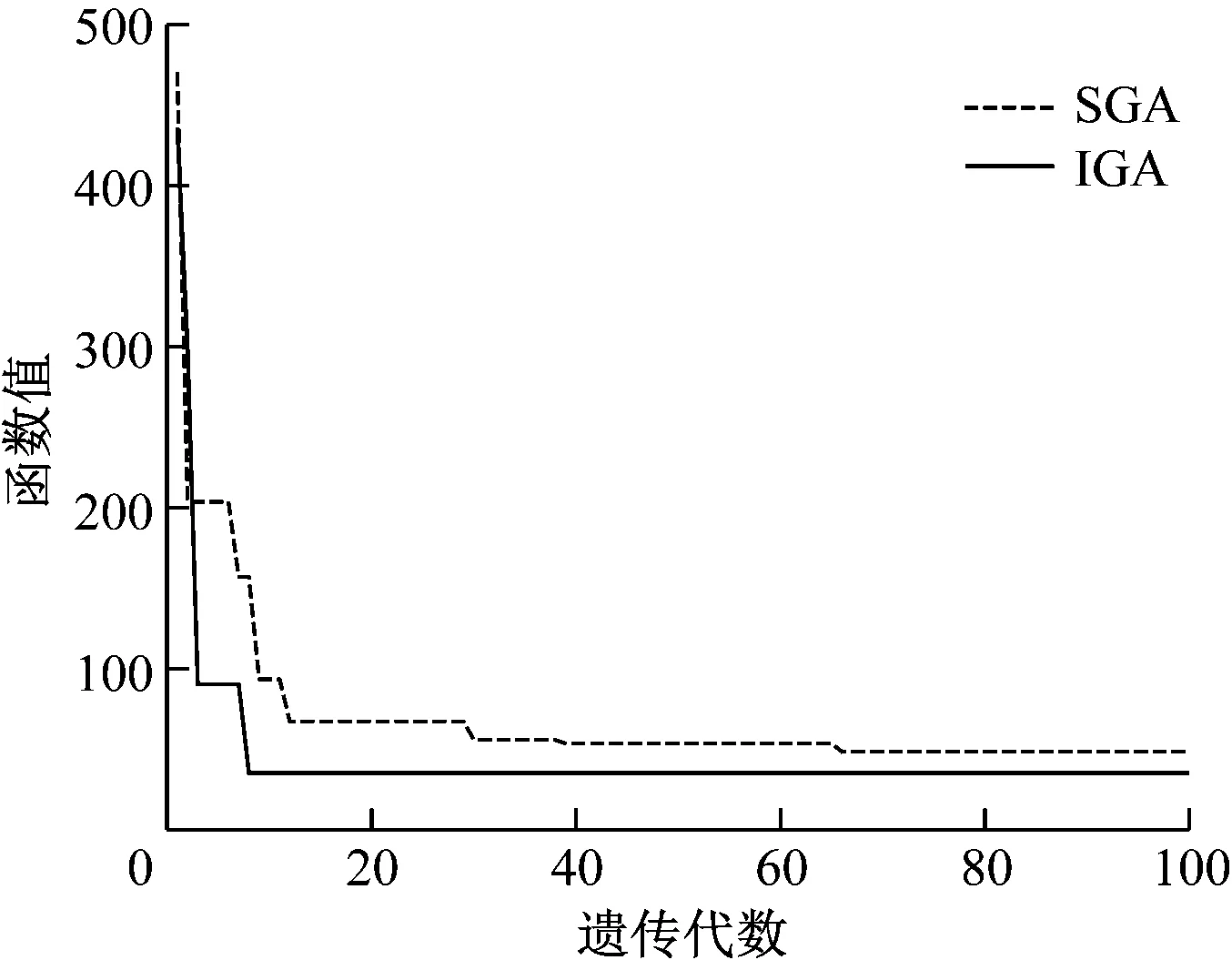
圖5 目標函數J的變化曲線Fig.5 Change curves of objective function J
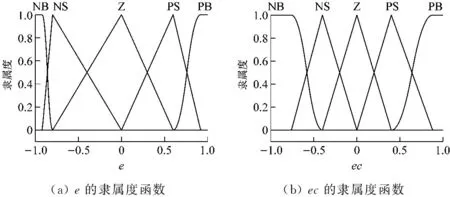
經過IGA優化后,獲得最優個體為{3443,2423,4322,4232,2233,54322,53223,43432,23323,21213,43432,54334,14332,41323,22322,41333,22454,34433,34333,22333}。經過解碼可以得到優化后的模糊控制器模糊規則庫(表2)和隸屬度函數(圖6)。
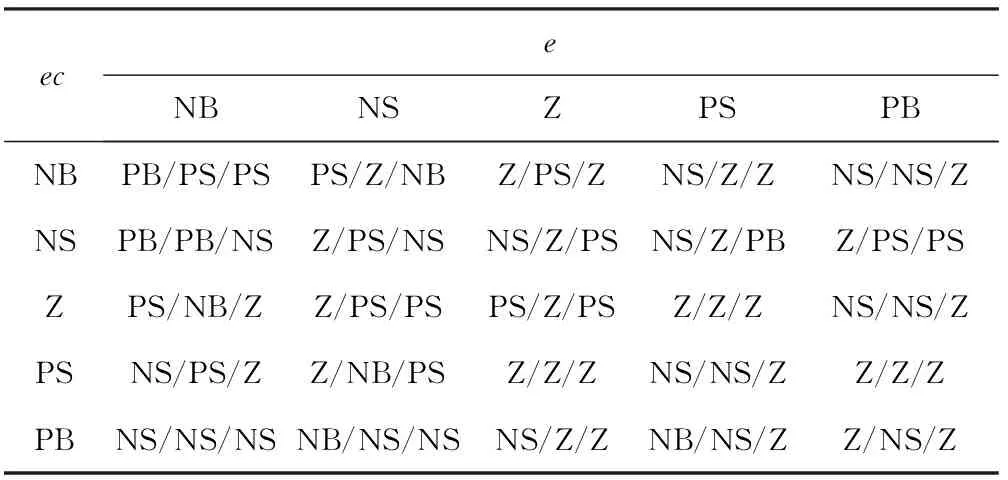
表2 改進遺傳算法優化后的ΔKp/ΔKi/ΔKd的模糊規則庫Table 2 Fuzzy rule base of ΔKp/ΔKi/ΔKdoptimized by improved genetic algorithm
將得到的隸屬度函數和模糊規則庫代入到模糊PID控制器中。利用Z-N法整定PID控制器的參數,Kp=0.16,Ki=0.2,Kd=0.022。設模糊PID控制器和改進模糊PID控制器的初始參數Kp0=0.2,Ki0=0.25,Kd0=0.03。同時為對比抗干擾能力,在0.2 s處加入幅值為0.2的擾動信號。3種控制器的單位階躍響應曲線如圖7所示,輸出結果比較見表3。
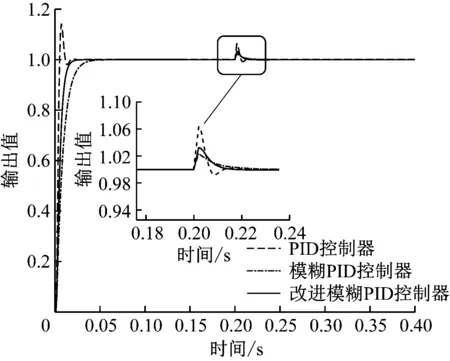
圖7 3種控制器的單位階躍響應曲線Fig.7 Unit step response curves of three kinds of controller
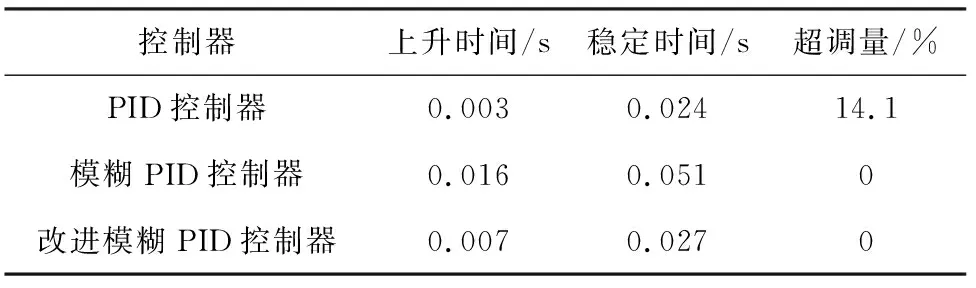
表3 3種控制器的輸出結果比較Table 3 Comparison of output results of three kinds of controller
由圖7可看出,在0.2 s加入幅值為0.2的干擾信號后,PID控制器在0.219 s恢復穩定,最大擾動幅值為1.064;模糊PID控制器在0.229 s恢復穩定,最大擾動幅值為1.023;改進模糊PID控制器在0.216 s恢復穩定,最大擾動幅值為1.032。改進模糊PID控制器受到干擾后,最大擾動幅值適中且恢復時間最短。說明改進模糊PID控制器的控制效果最佳,抗干擾能力最強。
由表3可看出,PID控制器由于參數固定不變,雖然可以實現較短的上升和穩定時間,但卻有明顯的超調。模糊PID控制器能夠根據不同的控制要求自適應調整控制器的參數,基本沒有超調量,但由于控制器的隸屬度函數和模糊規則是根據經驗設置的,具有較大的主觀性,限制了模糊PID控制器的控制效果,使得模糊PID控制器的上升和穩定時間較長。改進模糊PID控制器利用改進遺傳算法的尋優能力,實現了控制器中隸屬度函數和模糊規則最優組合,使得其在沒有超調的情況下,較模糊PID控制器上升時間縮短了56.25%,穩定時間縮短了47.06%。
3 結論
(1) 由于礦井局部通風機具有時變、非線性的特點,固定參數的PID控制器很難達到良好的控制效果。為了更好滿足礦井局部通風機的控制要求,設計了一種基于改進遺傳算法優化的模糊PID控制器。同時對于傳統遺傳算法容易出現局部最優解和早熟的問題,在改進遺傳算法中引入歐氏距離來提高算法中種群的多樣性,同時引入自適應交叉和變異概率來提高算法的收斂性。在編碼過程中采用比例分數間接實現對隸屬度函數的優化,使得改進遺傳算法能夠同時優化隸屬度函數和模糊規則。將優化得到的隸屬度函數和模糊規則導入模糊PID控制器中,通過不斷檢測誤差e和誤差變化率ec,根據模糊規則實時調整PID的3個參數,實現控制器對礦井局部通風機的自適應控制。
(2) 以礦井局部通風機的數學模型作為控制對象,測試PID控制器、模糊PID控制器、改進模糊PID控制器的單位階躍響應曲線。對比結果顯示,PID控制器有較大的超調量,模糊PID控制器和改進模糊PID控制器基本沒有超調,同時改進模糊PID控制器相較模糊PID控制器上升時間縮短了56.25%,穩定時間縮短了47.06%。在受到信號干擾后,改進模糊PID控制器最大擾動幅值適中且恢復時間最短。改進模糊PID控制器能夠更好地滿足礦井局部通風機的控制要求,對礦井局部通風機的變頻控制系統優化具有一定意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45