基于FPGA軟件的非接觸供電列車運行模擬分析*
2021-09-29 08:53:42裴春興王遠霏孫海榮
城市軌道交通研究 2021年9期
李 娜 裴春興 王遠霏 孫海榮
(中車唐山機車車輛有限公司運修技術中心,063035,唐山//第一作者,工程師)
采用新型非接觸供電能夠降低軌道交通牽引供電系統維護成本,提高安全性,是未來重點發展的新型牽引供電技術之一。
自20世紀90年代以來,國內外研究機構就開始了軌道交通非接觸供電的研究,并取得了一定成果。在理論研究方面,電磁耦合機構作為非接觸供電的核心部分,是國內外重點研究對象。文獻[1]提出了一種低阻性的接收線圈參數設計方法,對于由幾何參數和材料確定的接收線圈,通過理論計算分析得到了導線直徑的最優值。文獻[2]研究了一種新型的閉合雙環型拾取機構,利用磁場通路與鐵心環路匹配減小磁阻,提高了接收線圈與發射線圈之間的耦合系數。文獻[3]提出的接收線圈與發射線圈矩形纏繞結構,可以有效解決線圈未對準造成的傳輸效率低的問題,允許更大的偏移和角傾斜。文獻[4]采用非對稱結構的S 形磁心極大地提高了耦合系數。文獻[5]研究了一種double D結構的電磁機構,增加了橫向偏移能力。文獻[6]發現雙U型耦合電磁機構在全阻性負載條件下具有更大的耦合系數及傳輸效率。此外,在非接觸供電系統的基本原理分析、系統控制方法設計、高頻逆變電路設計等方面也有眾多的研究成果。
目前,世界上仍沒有成熟的基于非接觸供電的軌道交通運營線路,但韓國研究團隊于2013年在韓國五松站建成無線供電的有軌電車示范線路并試驗成功。該車通過多接收線圈拾取實現大功率能量傳輸,系統整體效率達到82.7%。2009年,加拿大龐巴迪旗下的PRIMOVEP品牌推出基于無線供電的有軌列車解決方案,并在德國建立一條示范線,無線供電系統輸出功率可達100至500 kW;當列車工作在270 kW輸出功率時,可以加速到80 km/h。
我國科研機構對非接觸供電技術在軌道交通中的應用研究起步相對較晚,且大多停留在理論層面。本文另辟蹊徑,從研究非接觸式供電列車與軌旁牽引供電系統的匹配關系的角度出發,采用基于FPGA(現場可編程門陣列)軟件的高速仿真平臺對非接觸供電列車進行模擬運行,并考慮在車輛系統中配置儲能單元進行能耗優化分析。仿真結果為非接觸供電系統電源基站設計和系統配置提供了參考依據。
1 系統結構及原理
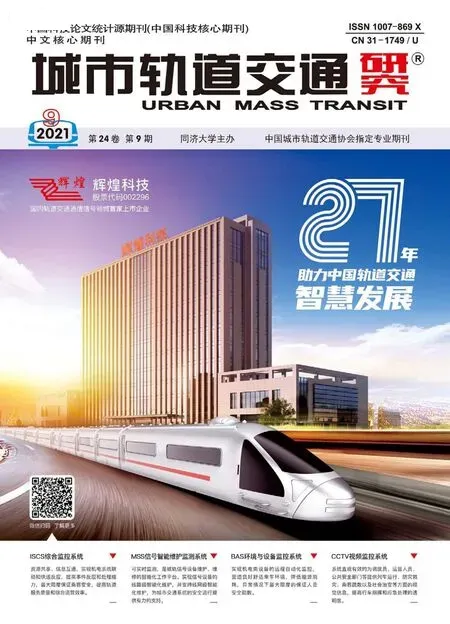
圖1為非接觸供電列車系統架構。如圖1所示,電源基站將三相50 Hz、380 V交流電轉換成高頻交流電。高頻交流電加到松耦合變壓器原邊線圈(即電能發射板,鋪在兩根鋼軌中間),并在空間產生高頻磁場,在車載接收板感應出電壓,從而實現無接觸電能傳輸。車載能量接收板感應出的電壓經整流器和DC-DC變換器生成穩定的750 V直流電壓,為列車牽引系統和輔助系統提供電力。列車中配置超級電容作為儲能單元,通過雙向DC-DC變換器連接到直流母線,可實現能量的雙向供電。
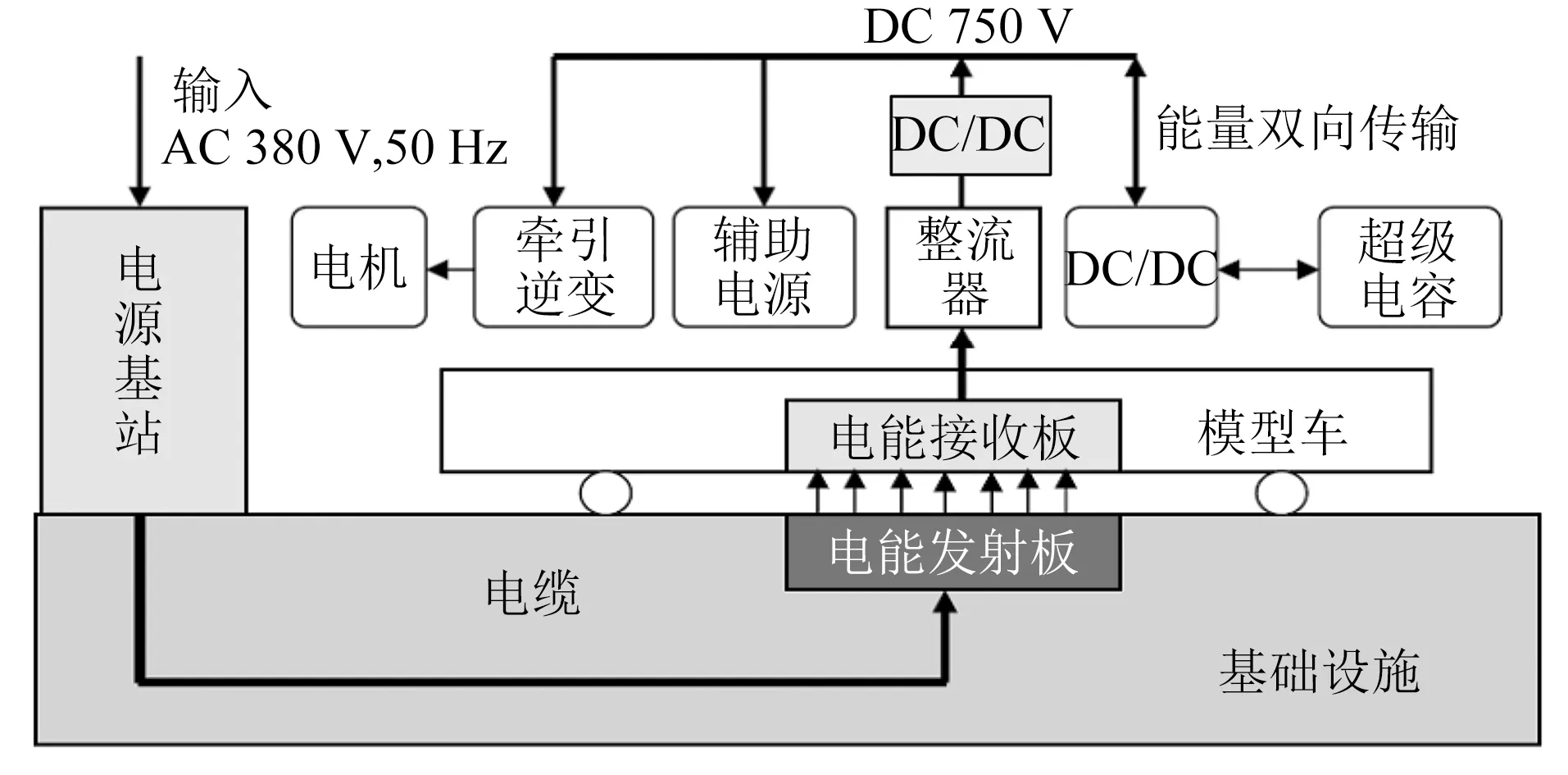
圖1 非接觸供電列車系統架構
2 模擬運行模型
為了最大程度模擬真實非接觸供電系統的運行工況,并能夠進行運行控制策略和能量管理策略的研究,本文針對圖1所示的非接觸供電列車系統架構搭建基于真實物理拓撲結構的牽引傳動系統數字仿真模型。分別對圖1所示的電源基站、能量耦合線圈、車載整流器、DC-DC變換器、儲能單元、牽引、輔助負載等建立其數學模型。此外,需建立列車運行于特定線路上的動力學模型[7]。
2.1 牽引傳動系統模型
以核心的松耦合變壓器(耦合線圈)為例。對其進行數學原理分析,為建立虛擬列車模型提供建模依據。本文中對單節列車進行運行模擬,列車底部放置3塊能量接收板,如圖2所示。因此對應的松耦合變壓器結構為1個原邊線圈+3個副邊線圈的結構形式。無線供電系統多采用在電路中串聯諧振電容的形式,使整個系統工作在諧振狀態,以提供能量傳遞效率。根據諧振電容在電路中部署位置的不同,可分為SS型、SP型、PP型、PS型,此處采用使用最多的SS型結構設計。松耦合變壓器的等效電路圖如圖3所示。
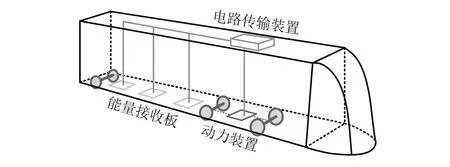
圖2 能量接收板布局示意圖
圖3 松耦合變壓器等效電路圖
根據松耦合變壓器的等效電路圖,可建立其數學模型:
式中:
Cp——原邊線圈的串聯諧振電容;
Rp——原邊線圈的等效阻值;
Lp——原邊線圈自感;
Ls,i(i=1、2、3)——副邊線圈的自感;
Rs,i(i=1、2、3)——副邊線圈的電阻;
Cs,i(i=1、2、3)——副邊線圈的諧振補償電容值;
Mi(i=1、2、3)——原邊、副邊線圈間的互感值;
U,I,R——分別為電壓、電流、電阻。
2.2 動力學模型
軌道交通中,列車在運行過程中的受力情況非常復雜,本文中僅考慮與列車速度相關的縱向力,主要包括牽引力、制動力、運行阻力。
2.2.1 牽引力與制動力模型
列車牽引力主要來自列車的牽引供電系統,通過牽引電動機將電能轉換為機械能,然后傳遞到車輪上;通過車輪與鋼軌間的接觸和摩擦產生輪周牽引力,從而使列車能夠向前運行。
列車制動力是由制動裝置產生的、與列車在軌道上運行方向相反的、阻礙列車運動的力。對現在的軌道交通列車來說,由于車輛牽引傳動系統均采用了先進的變壓變頻交流電機驅動系統,因此在高速運行時具有良好的電制動性能。只有當列車速度降低到很低時,此時電制動效果衰減,必須采用空氣制動系統進行列車制動[8]。常見地鐵列車的牽引及電制動力特性曲線如圖4所示。
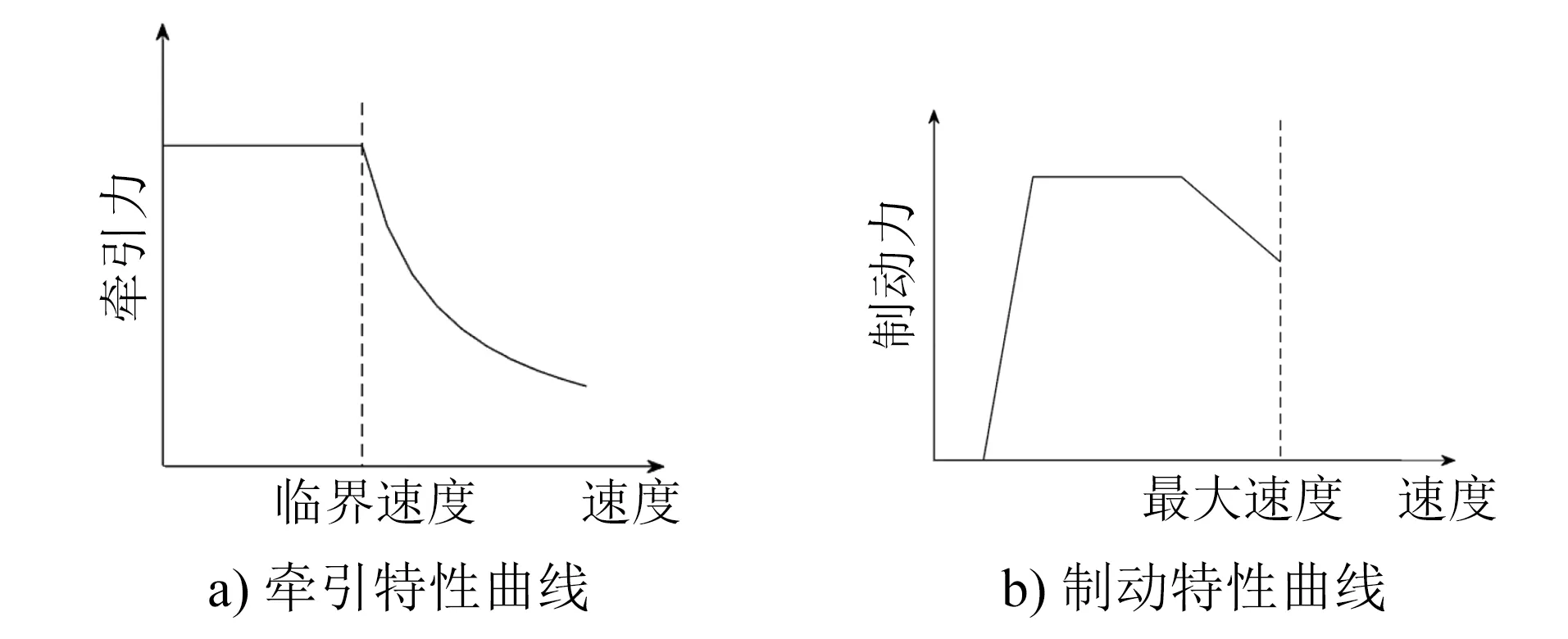
圖4 地鐵列車牽引及電制動力特性曲線
2.2.2 列車運行阻力模型
列車運行阻力包括基本阻力和附加阻力。基本阻力包括列車自身及與鋼軌之間的機械阻力、空氣阻力,主要取決于列車運行速度的大小。附加阻力與基本阻力不同,受車型影響很小,主要取決于線路條件,包括坡道附加阻力、曲線附加阻力和隧道附加阻力。
1) 基本阻力:是牽引計算中常用的重要參數之一。影響基本阻力的因素除包含零部件之間、車表面與空氣之間以及車輪與鋼軌之間的摩擦和沖擊外,還包括列車外形、動車結構、技術狀態、氣候條件、列車運行速度等。這些因素極為復雜,實際運用中很難用理論公式精確計算,通常采用由大量列車試驗得到的經驗公式進行計算[9]。列車運行過程的單位基本阻力計算公式一般為運行速度的二次三項式,即
ω0=A+Bv+Cv2
式中:
w0——列車單位基本阻力,N/kN;
A,B,C——與車型有關的經驗常數;
v——列車運行速度,km/h。
目前,成熟的車型均已總結出相應的經驗公式。但是由于非接觸供電列車目前在我國仍未有成熟的商業運行,因此也缺乏相應的基本阻力經驗公式。本文根據經驗選取CRH1-200型動車組的經驗公式作為非接觸供電列車的參考值,雖與實際情況有差異,但仍具有理論參考意義。列車單位基本阻力計算公式如下:
ω0=1.12+0.005 42v+0.000 146v2
列車基本阻力W0計算公式如下:
W0=Mω0g
式中:
M——列車總質量,t;
g——重力加速度,m/s2。
2) 附加阻力:主要體現在坡道阻力、曲線阻力和隧道阻力中。坡道附加阻力有正負之分,列車在上坡運行時,坡道附加阻力為正,下坡運行時坡道附加阻力為負。列車的單位坡道附加阻力wi,其數值(單位為N/kN)等于該坡道的坡度千分數i,即:
wi=i
曲線附加阻力為當列車進入曲線時因摩擦加劇而產生的阻力。其值與曲線半徑、列車速度、曲線外軌超高,以及軌距加寬、車輛軸距等許多因素都有關系,計算時一般采用經驗公式。當列車長度小于等于圓曲線長度,即列車全長都在曲線內時,一般采用如下經驗公式:
式中:
wr——單位曲線附件阻力,N/kN;
R——曲線半徑,m;
α——曲線中心角,(°);
Ly——圓曲線長度,m。
城市軌道交通中,隧道也是常見的軌道路況之一。列車在隧道中運行時,頭部正壓力與尾部負壓力產生壓力差;同時由于車輛外形結構的原因,隧道內的空氣產生紊流,與列車表面摩擦,因此產生隧道附加阻力。隧道附加阻力也與眾多因素相關,且隧道越長、牽引車輛數越多、運行速度越高,隧道空氣附加阻力越大。單位隧道空氣附加阻力ws(單位為N/kN)值很難從理論上推導出經驗公式,通常采用經驗公式或根據試驗數據進行計算。
隧道內有限制坡道時:
隧道內無限制坡道時:
ws=0.000 13Ls
式中:
Ls——隧道的長度,m;
vs——列車在隧道內的速度,km/h。
3) 阻力之和:用wj表示因線路條件產生的單位附加阻力之和,即:
wj=wi+wr+ws
則,列車運行時所受的阻力W為基本阻力與附加阻力之和,其計算公式為
W=(Mw0+Mwj)g×10-3
3 模擬運行平臺
3.1 高速仿真工具
在非接觸供電系統中,為了提高系統的耦合效率,提升能量傳輸功率,需要給發射線圈通入高頻的交流電,其頻率等級往往為幾十kHz,甚至100 kHz,因此針對非接觸供電系統的模擬運行實時仿真需要非常小的仿真步長。
目前市面上基于x86、PowerPC的處理器,其仿真步長理論上最快能達到20 μs(仿真速度50 kHz)的仿真步長,但在實際應用中一般采用50~100 μs甚至更大的仿真步長,無法滿足非接觸供電系統的仿真需求。
為解決上述問題,本項目中采用基于FPGA高速仿真板卡的模擬運行仿真方案。利用FPGA處理器高速、并行的運算能力,彌補x86處理器的不足。FPGA用于專門計算高速、復雜的模型,仿真步長可達10 ns(仿真速度100 MHz)。
3.2 平臺架構
非接觸供電列車的模擬運行平臺采用下位機架構。上位機中運行實時仿真監控軟件以及建模環境軟件等。本項目中的模型均基于matlab/simulink以及Xilinx System Generator環境搭建。下位機采用NI公司的實時仿真機箱及處理器,處理器中運行QNX實時操作系統。仿真機箱中配置3塊FPGA板卡用于運行對仿真速率要求較高的模型,對運行速率要求不高的模型運行在CPU處理器中,具體的模型分布如圖5所示。上位機與下位機之間通過以太網進行通信,監控界面可實時顯示非接觸供電系統狀態,如電壓、電流、功率、車速等,并可通過在線調參功能對列車進行起動、加速、減速等運行工況設置。
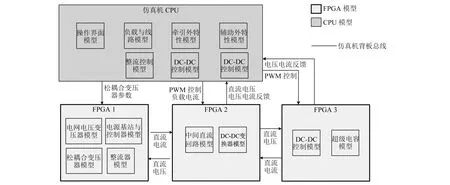
圖5 非接觸供電列車模擬運行模型分布框圖
4 模擬運行結果分析
模擬運行線路數據參考北京地鐵亦莊線線路數據,挑選亦莊線榮京東街站至萬源街站區段進行模擬運行,限速數據如表1所示。模擬運行結果如圖6~9所示。
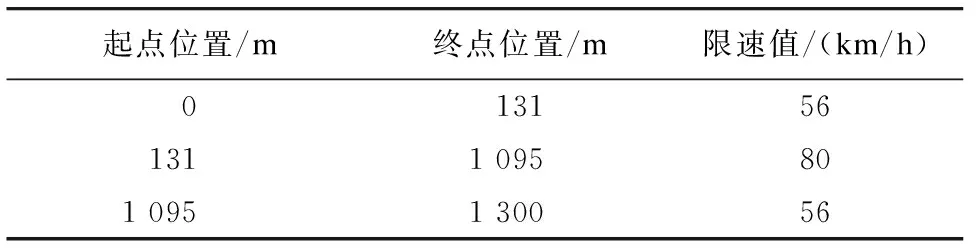
表1 北京地鐵亦莊線榮京東街站—萬源街站區段限速值
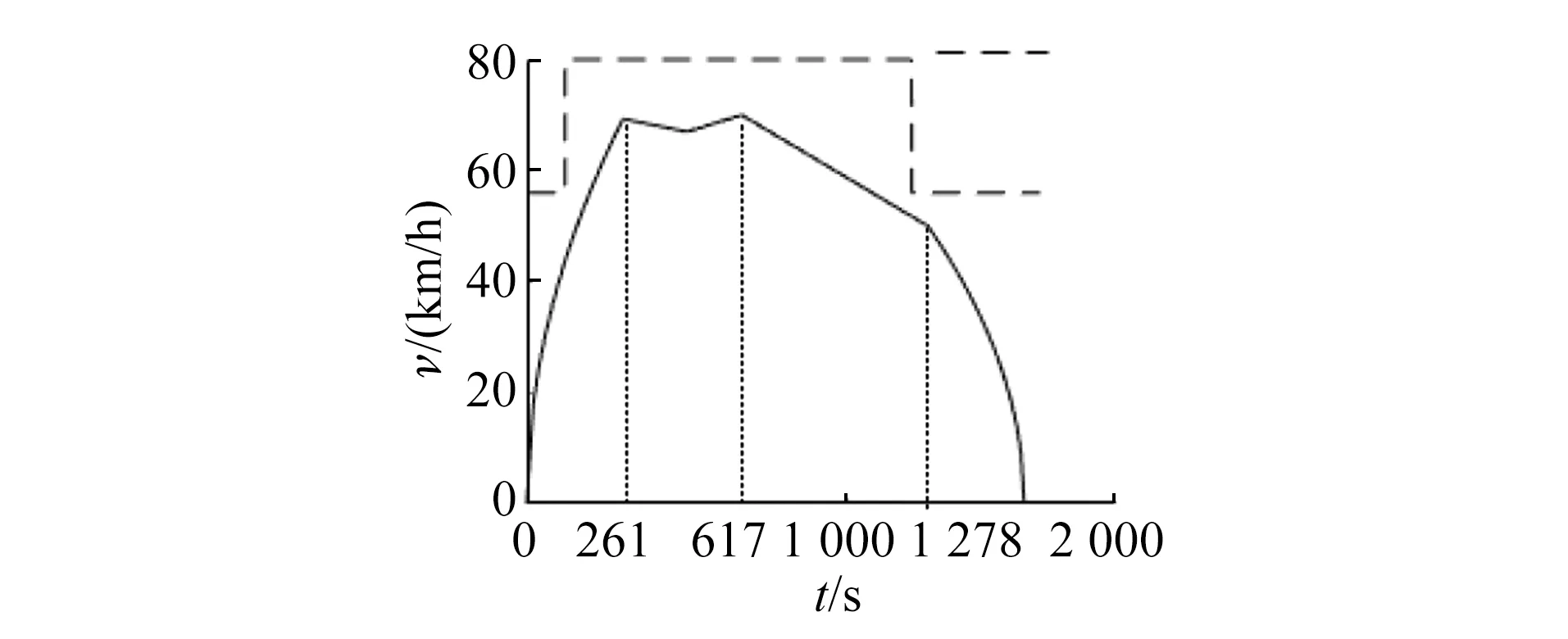
圖6 列車模擬運行曲線
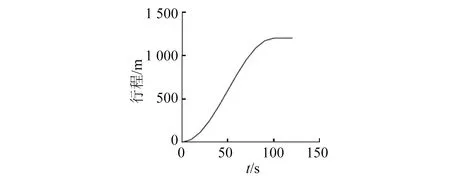
圖7 列車行程曲線
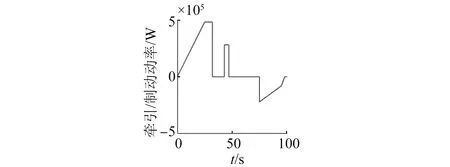
圖8 列車牽引/制動功率曲線
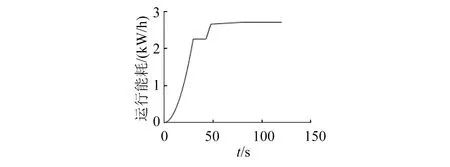
圖9 列車運行能耗曲線
對上述非接觸供電列車模擬運行仿真結果進行總結,結果如表2所示。

表2 非接觸供電列車模擬運行結果
以上為未考慮儲能單元的模擬運行,以下模擬考慮加入儲能單元驅動方式,并在制動時進行能量回收。模擬場景為,在始發站進行非接觸無線充電,充電完成后行駛1 300 m到達終點站。如圖10所示為列車儲能單元SOC(荷電狀態)變化曲線。
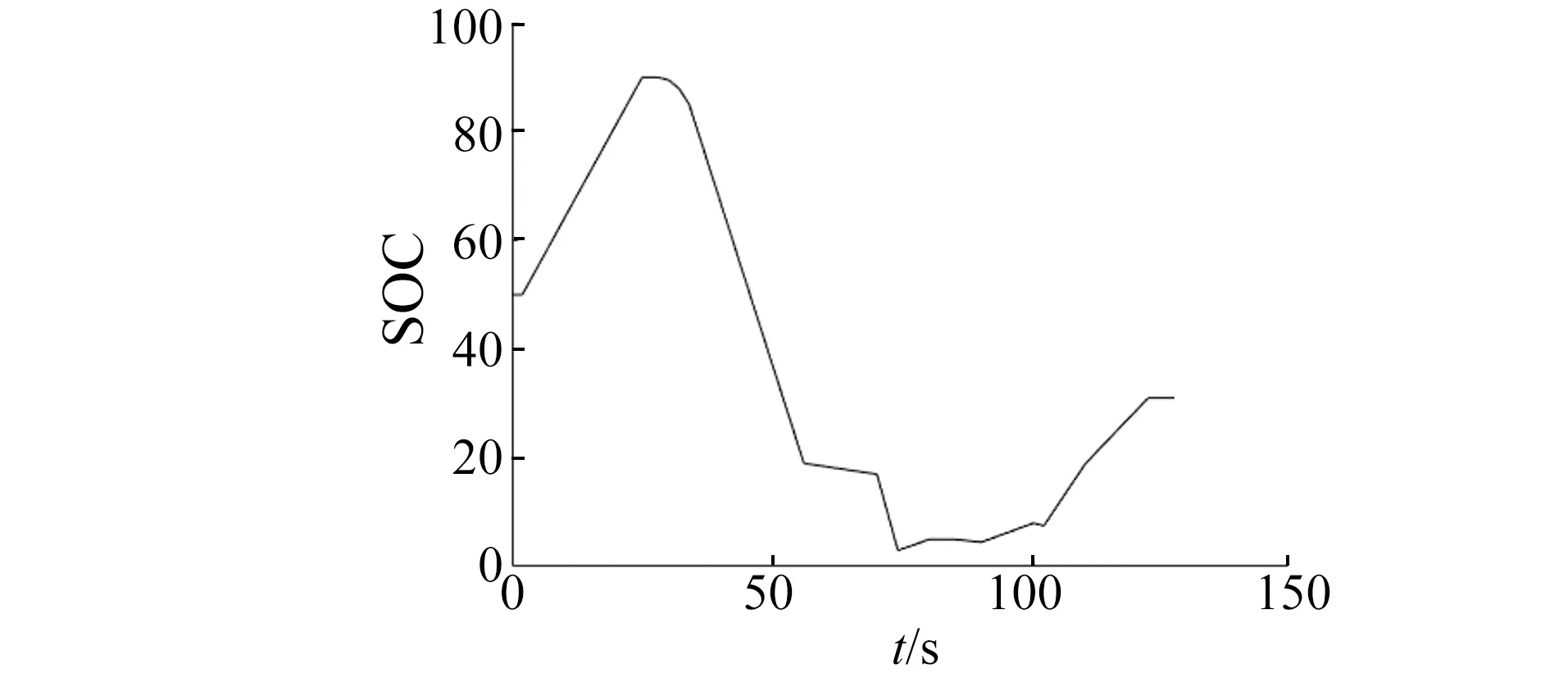
圖10 列車儲能單元SOC變換曲線
列車在站臺充電時,充電電流設定為500 A,儲能單元SOC從50%充電至90%,所需時間為29 s。考慮充電時間的儲能單元驅動下的列車運行結果如表3所示。
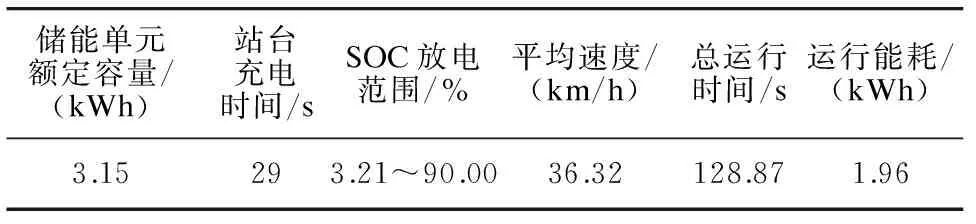
表3 考慮儲能單元驅動的非接觸供電列車模擬運行結果
列車在牽引-惰行階段SOC從90%下降至3.21%。引入儲能單元后,由于實現了制動能量回收,可為儲能單元反向充電。列車制動停穩后,SOC上升至33.27%。列車模擬運行能耗為1.96 kWh,比未考慮儲能單元情況能耗減少了0.77 kWh,減少幅度為28.21%,節能效果顯著。
5 結語
非接觸供電系統高安全性、美觀性、易于維護保養等特性是傳統牽引方式無法比擬的。本文通過對非接觸式供電列車運行情況進行模擬仿真,得出了列車在非接觸供電方式下的牽引功率及能耗。仿真分析結果可為將來非接觸供電列車的工程設計提供參考依據。