仿雙髻鯊頭部的仿生機(jī)器魚外型設(shè)計(jì)及其流場特性1)
2021-10-12 08:55:20馬楷東張瑞榮許銘揚(yáng)浦玉學(xué)
力學(xué)學(xué)報(bào) 2021年12期
關(guān)鍵詞:模型
馬楷東 張瑞榮 郭 鑫 許銘揚(yáng) 浦玉學(xué)
(合肥工業(yè)大學(xué)土木與水利工程學(xué)院,合肥 230009)
引言
隨著目前對于水下航行器的各方面研究不斷深入,人們逐漸將目光轉(zhuǎn)向自然界中魚類本身高效、靈活的運(yùn)動方式上,通過模仿自然界中魚類的外形特征以及運(yùn)動方式,并將其成果應(yīng)用在水下航行器研究中.自仿生機(jī)器魚成為國內(nèi)外仿生學(xué)領(lǐng)域研究熱點(diǎn)以來,美國、日本、英國和中國等多個國家的研究機(jī)構(gòu)相繼研發(fā)成功具備不同魚種特征的仿生機(jī)器魚,并已應(yīng)用在許多不同的應(yīng)用場景.
通過對2000 年到2020 年之間關(guān)于仿生機(jī)器魚的研究進(jìn)行調(diào)研,當(dāng)前關(guān)于仿生機(jī)器魚的研究主要集中在兩方面[1],一方面通過觀察自然界中魚類運(yùn)動的形式,研究其運(yùn)動機(jī)理并將成果應(yīng)用在水下航行器中.這一方面研究的主要方向可以分為兩類,一類是研究通過身體或尾鰭的擺動向前游動的魚類,這種魚類的推進(jìn)方式被稱為BCF 模式,具有代表性的是美國東北大學(xué)使用形狀記憶合金模仿魚體擺動,并成功研制了機(jī)器鰻魚樣機(jī)[2],以及中國科學(xué)院自動化研究所李林等制作的鲹科模式仿生型水下航行器等[3-4];另一類是研究通過中間鰭或?qū)挼臄[動向前游動的魚類,這種推進(jìn)方式被稱為MPF 推進(jìn)模式[5-6].其中高帥[7]在2014 年發(fā)表的仿生鰩魚的結(jié)構(gòu)設(shè)計(jì)與實(shí)驗(yàn)研究具有一定的代表性.
另一方面的研究則是從自然界中魚類的形體特征出發(fā)[8],研究其外觀形狀在其游動過程中所展現(xiàn)的流場特性及力學(xué)特征.這一方面的研究成果不斷涌現(xiàn)的原因是近年來隨著計(jì)算機(jī)的不斷發(fā)展,三維建模技術(shù)以及CFD (computational fluid dynamics)技術(shù)也日趨成熟,這使得研究者可以使用計(jì)算機(jī)對自然界中魚體的外形輪廓進(jìn)行三維建模,并使用CFD 對模型進(jìn)行仿真分析.田曉潔等[9]以金槍魚為仿生對象,以金槍魚在自然狀態(tài)下處于直線型的魚體特征為對象,在Solid Works 中進(jìn)行了三維模型的建立,并將其導(dǎo)入Ansys (Fluent 模塊)進(jìn)行仿真,分析了模型在定常流場下所呈現(xiàn)的力學(xué)特征,說明了流線型魚體在減阻方面的功能,為仿生機(jī)器魚的外形優(yōu)化設(shè)計(jì)提供了支撐.湯琳[10]以鯉魚的外形為參照,研發(fā)了一種BCF 推進(jìn)模式的機(jī)器魚,在Fluent中進(jìn)行了一系列仿真實(shí)驗(yàn),探究了不同推進(jìn)模式對于推進(jìn)性能優(yōu)劣的影響.周澍欣和胡慶松[11]以鯉魚為研究對象,以其為原型建立了三維模型,研究了該模型在定常流下不同部位對總和力的貢獻(xiàn)度,結(jié)論表明在鯉魚形機(jī)器魚外形設(shè)計(jì)中,升力以及運(yùn)行阻力主要與魚頭部分以及前鰭的設(shè)計(jì)有關(guān).
通過上述內(nèi)容可以得出,目前仿生機(jī)器魚的研制雖然在理論方面有了較為深入的進(jìn)展,但是以上研究中所提到的仿生機(jī)器魚模型在工程實(shí)際應(yīng)用中仍然具有較大的缺陷.對于以上研究中模仿自然界魚類外形的機(jī)器魚來說,雖然都有良好的減阻性能,但在工程實(shí)際中往往需要機(jī)器魚的外形輪廓設(shè)計(jì)不僅要使其具有優(yōu)良的減阻性,而且需要考慮內(nèi)部的容積是否合理,體型是否利于傳感器的安裝等,在某些特殊作業(yè)中,還需要降低機(jī)器魚行進(jìn)過程中對周圍環(huán)境的干擾以及提高機(jī)器魚本身的隱蔽性等[12-13].
雙髻鯊的頭部外形獨(dú)特,作用如同一個水中翼,幫助它在水中自由遨游,而且分布在雙髻鯊頭部前側(cè)的化學(xué)傳感神經(jīng)、電子傳感神經(jīng)和壓力傳感神經(jīng)也對它的生存有很大幫助.本文通過模仿雙髻鯊(又稱錘頭鯊)的外形特征,從仿生工程學(xué)的角度設(shè)計(jì)并提出了一種新的符合工程實(shí)際需求的仿生機(jī)器魚外形,通過與翼型殼體機(jī)器魚體以及市場上常見的回轉(zhuǎn)體型水下機(jī)器人進(jìn)行對比[14-15],利用Solid Works進(jìn)行3 種模型方案的三維建模和網(wǎng)格化,分析了3 種方案在來流為定常流時魚體在給定流場下所呈現(xiàn)的力學(xué)特征,從工程實(shí)際需求的角度出發(fā),分別從擾動性、減阻性等方面進(jìn)行了評估和對比.同時對該仿生機(jī)器魚外形設(shè)計(jì)在流場中表現(xiàn)的特殊性質(zhì)進(jìn)行了探究和評價.本文借助CFD 技術(shù)采用數(shù)值模擬的方法,結(jié)合具體設(shè)計(jì)參數(shù)進(jìn)行了仿真實(shí)驗(yàn),研究了該機(jī)器魚外形設(shè)計(jì)在流場中的特性,為仿生水下航行器外形設(shè)計(jì)的優(yōu)化提供了參考數(shù)據(jù)和新的思路[16-17].
1 仿雙髻鯊頭部特征機(jī)器魚模型建模
1.1 雙髻鯊生物形態(tài)特征分析
雙髻鯊,其形態(tài)特征具有明顯的特點(diǎn),頭部一般呈扁平狀,具有一定的流線型特征,頭部向兩側(cè)延伸,形成鎚狀突出,為“丁”字形,故也稱 “錘頭鯊”,其外形如圖1 所示.頭長約為全長的2/9 (幼體)至1/5.身體狹長,側(cè)邊偏扁,整體呈亞圓筒形[18].由于雙髻鯊的種類繁多,本文選取了其中3 種最具代表性的雙髻鯊,分別是錘頭雙髻鯊、丁字雙髻鯊和窄頭雙髻鯊,進(jìn)行生物形體特征提取.

圖1 雙髻鯊?fù)庑螆DFig.1 Shape image of a hammerhead shark
1.2 生物外形特征提取
本文從仿生工程學(xué)的角度出發(fā),將雙髻鯊的頭部形態(tài)特點(diǎn)與工程實(shí)際相結(jié)合,從而設(shè)計(jì)了機(jī)器魚模型.采用生物外形特征提取技術(shù)[19-20],利用CorelDRAW,Illustrator 等軟件對3 種雙髻鯊的3D掃描模型進(jìn)行邊緣點(diǎn)的檢測、線條擬合等操作,生成雙髻鯊?fù)庑翁卣鞯妮喞€.依據(jù)局部抽取優(yōu)化法,選取雙髻鯊頭部的曲線線條,提取曲線結(jié)果如圖2 所示.
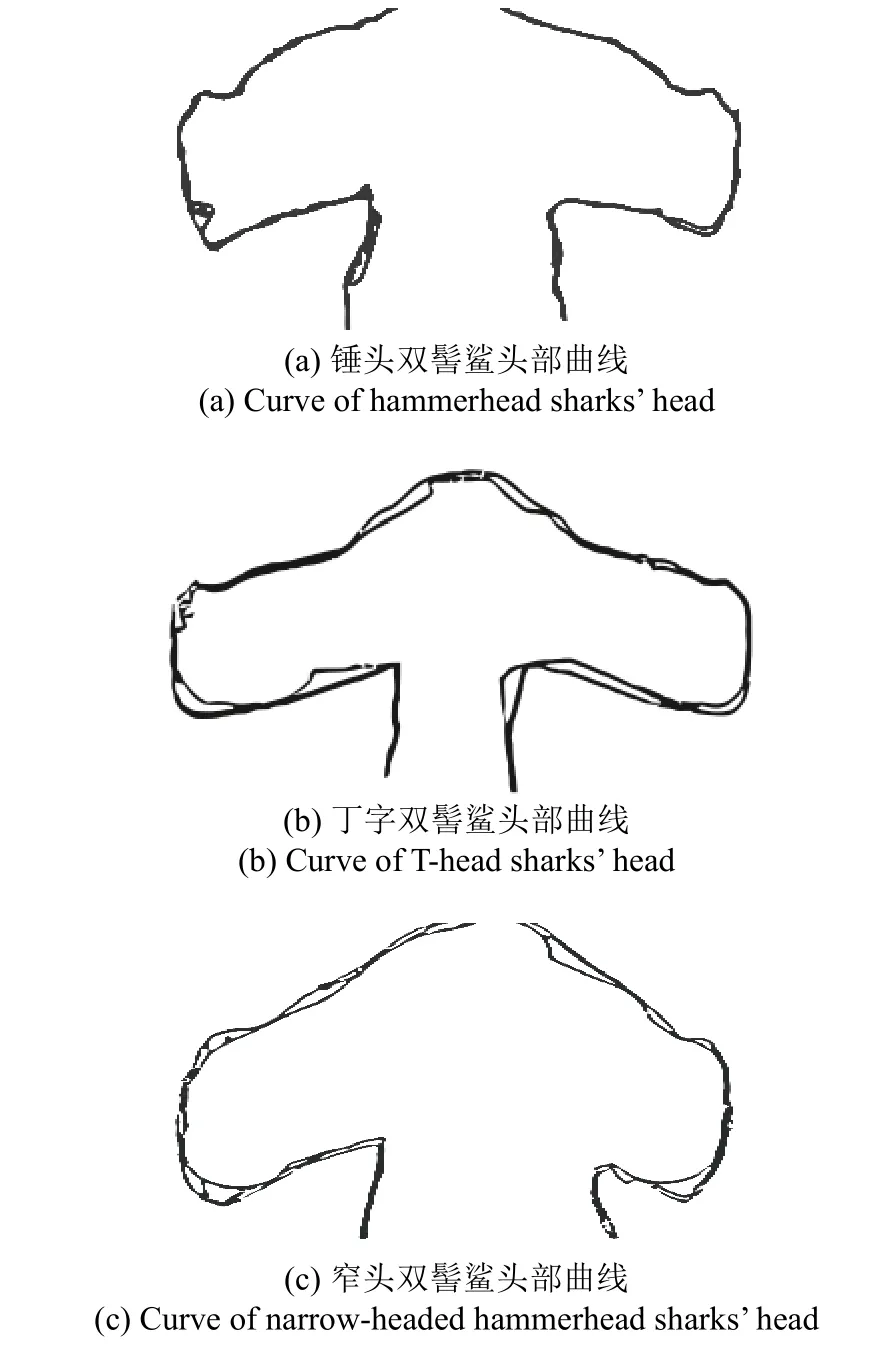
圖2 3 種雙髻鯊頭部輪廓曲線特征提取圖Fig.2 Feature extraction of head profile curves of three species of hammerhead sharks
1.3 外形輪廓線條擬合
由于直接提取的頭部特征曲線并不規(guī)則,在工程實(shí)際中難以直接利用,所以對頭部特征曲線進(jìn)行了平滑處理,生成規(guī)則的曲線.本文采用曲線插值擬合的方法,先提取輪廓曲線上的關(guān)鍵點(diǎn),對點(diǎn)進(jìn)行坐標(biāo)化,再對數(shù)據(jù)進(jìn)行多種曲線擬合,截取擬合效果最好的模型曲線.擬合結(jié)果如圖3 所示,圖中散點(diǎn)為坐標(biāo)化后的數(shù)據(jù)點(diǎn),曲線為擬合后的曲線.表1 為3 種模型輪廓所用的曲線模型及方程,表2 所示為擬合曲線的方程參數(shù).

圖3 3 種雙髻鯊頭部輪廓曲線擬合圖Fig.3 Head contour curve fitting of three species of hammerhead
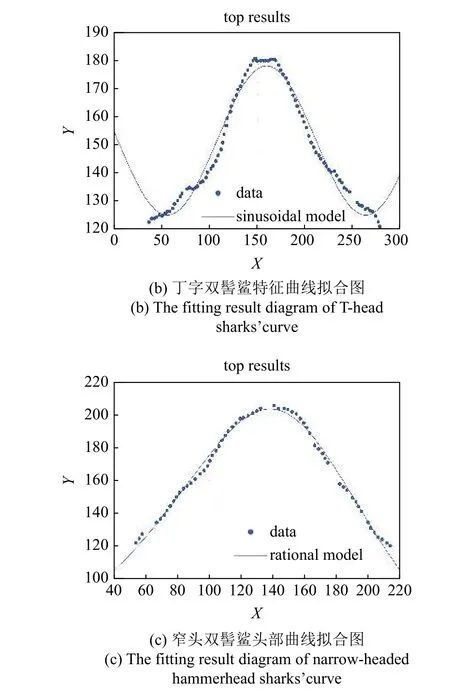
圖3 3 種雙髻鯊頭部輪廓曲線擬合圖 (續(xù))Fig.3 Head contour curve fitting of three species of hammerhead(continued)
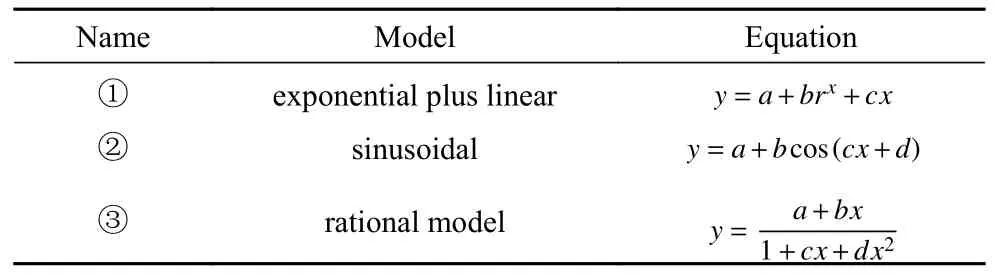
表1 3 種模型所用擬合曲線Table 1 Fitting curves used for the three models

表2 3 種曲線擬合的具體參數(shù)Table 2 Parameters of three fitting curves
1.4 機(jī)器魚頭部特征曲線的選擇
以3 種雙髻鯊頭部的擬合曲線為驅(qū)動方程式,建立具備其頭部外輪廓特征的簡易模型,參考文獻(xiàn)[9] 中的方法對模型進(jìn)行仿真分析.圖4(b) 中①②③,分別代表錘頭雙髻鯊、丁字雙髻鯊、窄頭雙髻鯊.由圖4(a)中3 種簡易模型在不同流速下的阻力值折線圖所示,其中3 種簡易模型在0~ 2 m/s流速下,所受阻力相近,但當(dāng)流速大于2 m/s 時,丁字雙髻鯊簡易模型所受的阻力值明顯大于錘頭雙髻鯊簡易模型和窄頭雙髻鯊簡易模型,而錘頭鯊輪廓模型與窄頭鯊簡易模型相比,錘頭鯊簡易模型阻力略小與窄頭鯊模型所受到的阻力,即由錘頭鯊頭部外形輪廓制成的簡易模型具有最優(yōu)的減阻性;圖4(b)中流速云圖中,自上而下分別為在同等流速條件下的①錘頭雙髻鯊簡易模型流速云圖、②丁字雙髻鯊簡易模型流速云圖、③為窄頭雙髻鯊簡易模型流速云圖,可以得到在同樣的流速場中,遠(yuǎn)離模型的流場沒有受到模型的干擾,流場保持穩(wěn)定;當(dāng)靠近模型時,水流向兩側(cè)分離,速度增加,而模型后方流速較小,從而形成尾跡.由圖①②③對比可得具有錘頭雙髻鯊頭部輪廓特征的簡易模型①相較于其他兩種模型來說產(chǎn)生的尾跡更小,對周圍流場干擾更小,周圍流場更加穩(wěn)定.

圖4 3 種模型在不同流速下的阻力值折線圖及流速云圖Fig.4 Line chart and cloud chart of resistance values of three models at different flow rates
經(jīng)過以上分析,錘頭雙髻鯊長寬比協(xié)調(diào),形體特征明顯,排流曲線斜率大,且頭部呈流線型,減阻性能好、且對周圍流場干擾性小,故將錘頭雙髻鯊的擬合特征曲線作為機(jī)器魚建模時的參照曲線最為優(yōu).
1.5 機(jī)器魚體外形設(shè)計(jì)
參照文獻(xiàn)[21]的內(nèi)容,以錘頭雙髻鯊頭部的擬合曲線為驅(qū)動方程式,在Solid Works 軟件中進(jìn)行機(jī)器魚體頭部三維模型的構(gòu)建,并且在機(jī)器魚頭部頂端、機(jī)器魚頭部與身體連接處采用流線型過渡和平滑曲線過渡,以減小機(jī)器魚在水中行進(jìn)時的阻力;考慮到機(jī)器魚應(yīng)具有良好的工程適應(yīng)性以及裝配可行性,魚體中部應(yīng)設(shè)計(jì)為規(guī)則形狀且其內(nèi)部應(yīng)有足夠的空間放置控制系統(tǒng)、驅(qū)動系統(tǒng)和傳感器元件等功能裝置,故將魚體中部設(shè)計(jì)為扁平狀,魚體尾部設(shè)計(jì)為流線型過渡,以減少尾流.仿雙髻鯊模型主要參數(shù)如表3 所示.

表3 模型尺寸參數(shù)Table 3 Size parameters of the model
通過對錘頭雙髻鯊的形體特征分析,本文中將魚體寬度設(shè)計(jì)為略小于雙髻鯊頭部寬度,并推測在這樣的設(shè)計(jì)中,雙髻鯊頭部向兩側(cè)排開的“丁字”型結(jié)構(gòu)可以對魚體周圍的流場創(chuàng)造低流速區(qū)域,即水流通過機(jī)器魚頭部后,由于頭部和身體的寬度關(guān)系,會在機(jī)器魚頭部后方一定范圍內(nèi)的魚體的兩側(cè)產(chǎn)生低流速區(qū)域,從而減少此區(qū)域內(nèi)機(jī)器魚體對周圍流場的干擾性,這種作用在工程實(shí)際中具有良好的利用價值,可以極大地提高機(jī)器魚體的可擴(kuò)展性和隱蔽性.如圖5,為仿生機(jī)器魚模型設(shè)計(jì)細(xì)節(jié)和示意圖.
2 數(shù)值計(jì)算
2.1 機(jī)器魚網(wǎng)格劃分
對于機(jī)器魚體的流體仿真分析來說,魚體及其所處流場的網(wǎng)格劃分結(jié)果直接關(guān)系到仿真結(jié)果的正確性和精確性,所以根據(jù)魚體的建模情況來正確地選擇網(wǎng)格劃分方法是十分有必要的.精確度和求解所需的時間是計(jì)算流體動力學(xué)仿真中十分關(guān)鍵的問題,這兩個問題都依賴于網(wǎng)格的特點(diǎn).本次進(jìn)行仿真模擬的3 種模型方案表面并不規(guī)則且包含尖端部分,需要不同類型的網(wǎng)格劃分元素來求解各種幾何形狀和流態(tài),這其中不同類型的網(wǎng)格劃分元素之間的過渡是必須要考慮的問題.一般情況下過渡區(qū)通常依賴于非共形界面或四面體,但這樣處理可能會造成網(wǎng)格質(zhì)量下降而且還伴隨著生成過多的單元格從而導(dǎo)致求解時間變長的問題.本文中使用了Ansys Mosaic 技術(shù)[22],將不同類型的網(wǎng)格與一般多面體元素進(jìn)行連接.Mosaic 網(wǎng)格具有數(shù)量更少、質(zhì)量更好的單元格,對于復(fù)雜外形的模型有非常好的適用性,且具有劃分效率高,求解時間短的特點(diǎn).
為了避免外流場邊界引起的邊界效應(yīng)[9-10]對仿真結(jié)果造成影響,設(shè)置計(jì)算域的尺寸為長L=10 m,寬B=5 m,高H=5 m,魚體置于計(jì)算域的中心位置.流體域網(wǎng)格劃分如圖6 所示.

圖6 流域及魚體網(wǎng)格劃分Fig.6 Watershed and fish body grid division
2.2 湍流模型及初始條件的設(shè)置
本次仿真中,考慮到流場進(jìn)口來流速度較小,且仿生魚特征尺寸較小,屬于低雷諾數(shù)問題,因此選擇RNGk-ε模型作為本次仿真的湍流模型,RNGk-ε是標(biāo)準(zhǔn)k-ε模型的變形,方程和系數(shù)來自解析解[23-28].標(biāo)準(zhǔn)k-ε模型是一種高雷諾數(shù)的模型,其標(biāo)準(zhǔn)方程為湍流動能方程和擴(kuò)散方程
動能方程

擴(kuò)散方程

式中Gk表示由層流速度梯度而產(chǎn)生的湍流動能.YM是由于在可壓縮湍流中,過渡的擴(kuò)散產(chǎn)生的波動,C1,C2,C3是常量,σk和σe是動能方程和擴(kuò)散方程的湍流Prandtl 數(shù),Sk和Se是用戶定義的數(shù)值.
RNG 理論提供了一個考慮低雷諾數(shù)流動黏性的解析公式,RNGk-ε模型的方程為

兩種模型的區(qū)別在于RNG 理論提供了

這使得其比標(biāo)準(zhǔn)k-ε模型在低雷諾數(shù)的流動問題中有更高的可信度和精度,通常用來預(yù)測中等強(qiáng)度的旋游和低雷諾數(shù)流動.
參照文獻(xiàn)[9-10]考慮到仿生機(jī)器魚被應(yīng)用的場景通常為自然狀態(tài)下的水域,所以選擇不可壓縮模流模型;由于本次仿真屬于低速流動問題,故選擇分離求解器(即基于壓力的求解器)比較適合,默認(rèn)采用Simple 算法進(jìn)行穩(wěn)態(tài)計(jì)算.設(shè)置流場的左側(cè)邊界為速度進(jìn)口邊界條件,右側(cè)為流出邊界條件,流場的其他面設(shè)置為壁面邊界條件;重力加速度設(shè)置為9.81 m/s2;由于采用了Ansys Mosaic 技術(shù),網(wǎng)格劃分中存在不同類型的網(wǎng)格單元,流動的方向與網(wǎng)格并不對齊,一階的迎風(fēng)格式會增大數(shù)值離散誤差,故選擇離散格式為二階迎風(fēng)格式,可以得到更為精確的計(jì)算結(jié)果.經(jīng)過對同類型的仿生機(jī)器魚進(jìn)行調(diào)研以及結(jié)合本文中仿真對象的速度考慮后,設(shè)置入口來流速度分別為0.25 m/s,0.5 m/s 和1 m/s.
3 仿真結(jié)果分析
3.1 阻力分析與計(jì)算結(jié)果對比
由于在仿生機(jī)器魚的絕大多數(shù)作業(yè)環(huán)境中其魚體下潛的深度都大于體長的1/3,這時興波阻力幾乎為0,故在阻力分析中,不考慮興波阻力,僅考慮壓差阻力以及黏性阻力.利用Fluent 在不同的來流速度下對三種模型進(jìn)行阻力分析.
如圖7 所示,綜合3 種模型在不同速度下的阻力分析得出,在來流方向平行于魚體直線的情況下,隨著機(jī)器魚行進(jìn)速度的增大,壓差阻力和黏性阻力都逐步增大.隨著速度的增大,壓差阻力占比越來越小,黏性阻力占據(jù)主導(dǎo)因素.3 種模型中以翼型曲線為特征的機(jī)器魚模型在行進(jìn)過程中受到的阻力最大,仿雙髻鯊模型所受的阻力最小,且流速越大差距越明顯,由此可得出仿雙髻鯊模型相對于另兩種模型具有更好的減阻性能,能夠有效的減少行進(jìn)時產(chǎn)生的阻力.表4 為阻力計(jì)算結(jié)果.

圖7 總阻力對比折線圖與黏性阻力對比折線圖Fig.7 Total resistance comparison line chart and viscous resistancecomparison line chart

表4 阻力計(jì)算結(jié)果Table 4 Drag calculation results
3.2 對周圍流場的干擾性對比分析
為分析3 種仿生機(jī)器魚模型在相同流速條件下對周圍流場干擾性的大小,選取魚體所在的中心平面為特征面進(jìn)行分析.當(dāng)來流速度為1 m/s 時3 種模型在定常流環(huán)境下仿真結(jié)果如圖8 所示.

圖8 流速分布云圖(左側(cè)為模型正視圖,右側(cè)為俯視圖)Fig.8 Velocity distribution nephogram (front view of the model on the left,top view on the right)
由流速分布云圖可以得到,3 種模型在定常流下均會產(chǎn)生不同大小尾跡.尾跡的形成是物體與流體發(fā)生相對運(yùn)動時,各層流體的速度發(fā)生了變化,形成了一定的速度差使得物體后面的壓強(qiáng)與流體其他部分的壓強(qiáng)不同,當(dāng)中心的流速比四周的流速小,在流場中的物體下游便形成尾跡[9].(1)從圖8 中3 種模型的正視流速云圖(即①③⑤)看,仿真結(jié)果顯示仿雙髻鯊頭部特征的機(jī)器魚(圖8(b))相較于翼型機(jī)器魚(圖8(a))和回轉(zhuǎn)體模型(如圖8(c)),在正視面對周圍流場的影響更小,其尾跡較小且對機(jī)器魚體周圍流場干擾范圍為三者中最小;(2)從3 種模型的俯視流速云圖(即②④⑥)觀察,由于仿雙髻鯊頭部特征的機(jī)器魚模型在機(jī)器魚頭部、尾部采用了流線型設(shè)計(jì),且整體采用扁平化結(jié)構(gòu),這使得其在俯視面內(nèi)的干擾性大大降低,魚頭部和尾部對周圍流場的影響范圍和程度都優(yōu)于翼型機(jī)器魚和回轉(zhuǎn)體模型,為三者中最優(yōu).
綜上所述,可以得到仿雙髻鯊頭部特征的機(jī)器魚外形在相同的流速條件下,相較于翼型機(jī)器魚和回轉(zhuǎn)體模型干擾性更小,表現(xiàn)在對周圍流體流速的影響程度小、周圍流體影響范圍小以及產(chǎn)生的尾跡小這三方面.
3.3 仿雙髻鯊頭部特征的機(jī)器魚周圍流場特性
由圖8 中仿雙髻鯊頭部特征的機(jī)器魚流速分布云圖中③機(jī)器魚周圍流速分布形狀推測: 當(dāng)機(jī)器魚迎流時,流體經(jīng)過仿錘頭雙髻鯊的頭部特征后在機(jī)器魚兩側(cè)形成了低流速區(qū)域,在低流速區(qū)域內(nèi)物體受到的流體阻力會更小,且處于此區(qū)域內(nèi)的物體不會對周圍流場造成明顯干擾,同時對于魚體隱蔽性的提升具有一定作用,為證明此推測,設(shè)置對比試驗(yàn).
3.3.1 對比實(shí)驗(yàn)設(shè)置
此實(shí)驗(yàn)為定性試驗(yàn),分別設(shè)置實(shí)驗(yàn)組和對照組,在本次試驗(yàn)中,對照組模型則不發(fā)生變化,實(shí)驗(yàn)組的模型則設(shè)置為在對照組模型的基礎(chǔ)上,在機(jī)器魚兩側(cè)頭部突起后方設(shè)置長方形障礙物.將兩組試驗(yàn)?zāi)P蛯?dǎo)入Fluent 中進(jìn)行流體仿真,以試驗(yàn)結(jié)果來對比長方形障礙物的存在是否會明顯地影響魚體周圍的流場情況.如圖9 所示,實(shí)驗(yàn)組機(jī)器魚與對照組機(jī)器魚模型尺寸相同,具體參數(shù)可參照表3,機(jī)器魚①為實(shí)驗(yàn)組模型,在機(jī)器魚頭部后方的低流速區(qū)域內(nèi)設(shè)置有長L=0.35 m,寬B=0.1 m,高H=0.05 m 的長方形凸臺作為障礙物;機(jī)器魚②為對照組實(shí)驗(yàn)?zāi)P?尺寸同圖5 所示.兩組實(shí)驗(yàn)均在迎流速度為1 m/s 的條件下進(jìn)行.
3.3.2 實(shí)驗(yàn)結(jié)果
利用同本文第2 節(jié)相同的方法,將兩組實(shí)驗(yàn)組模型進(jìn)行流體仿真分析,結(jié)果如下.
(1) 實(shí)驗(yàn)結(jié)果
通過觀察圖10,對比實(shí)驗(yàn)組機(jī)器魚模型的流速云圖和對照組模型流速云圖,在相同流速條件下,在低流速區(qū)域增加障礙物后機(jī)器魚周圍流場的大體形狀和范圍并沒有發(fā)生改變,對周圍流場影響的主要區(qū)域與對照組相同,都集中在機(jī)器魚頭部以及流體流經(jīng)機(jī)器魚后在尾部后方產(chǎn)生的尾跡,機(jī)器魚兩側(cè)流場保持穩(wěn)定.通過對照發(fā)現(xiàn),實(shí)驗(yàn)組與對照組的尾跡基本相同,這對有利于提高機(jī)器魚的隱蔽性[29-31].

圖10 對照組模型與實(shí)驗(yàn)組流體流速分布云圖Fig.10 Flow velocity distribution nephogram of control group model and experimental group
將機(jī)器魚所在的平面設(shè)置為觀測面,監(jiān)測該面內(nèi)點(diǎn)的速度值大小,結(jié)果如圖11 所示.通過對比兩圖可得,在計(jì)算域內(nèi),原理機(jī)器魚的地方,對照組和實(shí)驗(yàn)組都未對流速數(shù)值產(chǎn)生影響,在機(jī)器魚模型周圍,兩組實(shí)驗(yàn)?zāi)P退俣葦?shù)值分布形狀大致相同,并未發(fā)生太大變化.

圖11 流體平面速度分布對比圖Fig.11 Comparison diagram of fluid plane velocity distribution
綜上所述,該對比試驗(yàn)證實(shí)了前文中的推測,即: 當(dāng)機(jī)器魚迎流時,流體經(jīng)過仿錘頭雙髻鯊的頭部特征后在機(jī)器魚兩側(cè)形成了低流速區(qū)域,在低流速區(qū)域內(nèi)物體受到的流體阻力會更小,且處于此區(qū)域內(nèi)的物體不會對周圍流場造成明顯干擾.
4 結(jié)語
本文以雙髻鯊為參照對象,通過模仿其外形特征建立了符合工程實(shí)際需求的仿雙髻鯊機(jī)器魚模型,重點(diǎn)從擾動性、減阻性等方面對模型進(jìn)行評估.利用了Ansys Mosaic 技術(shù)進(jìn)行網(wǎng)格劃分,并依據(jù)工程實(shí)際場景設(shè)置了合理的流場邊界條件.基于RNGk-ε模型,研究并對比與不同其他仿生機(jī)器魚模型在特定流場下的力學(xué)特征及所受的阻力情況.仿真結(jié)果表面,仿雙髻鯊機(jī)器魚模型相較于以翼型機(jī)器魚模型和廣泛應(yīng)用的回轉(zhuǎn)體模型來說,具有更好的減阻性及更小的擾動性,可以有效減少仿生機(jī)器魚在水下航行時對周圍流場帶來的擾動并提高推進(jìn)效率,并且探究了仿雙髻鯊機(jī)器魚模型周身流場的特殊性,為仿生機(jī)器魚的發(fā)展提供新的思路,同時對水下機(jī)器人外形結(jié)構(gòu)的優(yōu)化設(shè)計(jì)提供依據(jù).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19