無線定位技術淺析
2021-10-12 16:03:54周靜楊新章
廣東通信技術 2021年9期
[周靜 楊新章]
1 引言
無線定位是指利用測量設備及無線信號,計算未知終端的地理位置的過程。未知位置的終端可以是手機、車輛、飛機、船舶、智能穿戴設備等終端設備;測量設備及發射端可以是衛星、蜂窩基站、WiFi 熱點、藍牙信標等發射無線信號的設備;與測量設備相對應,無線信號包括衛星信號、無線蜂窩信號、WiFi 信號和藍牙信號等。
無線定位技術可以追溯到上世紀五六十年代[1],衛星技術發展出了GPS 導航,為飛機、船舶等提供導航及定位服務。上世紀九十年代,3GPP 會議召開并制定了無線蜂窩的定位服務協議[2],不同研究者提出了以到達時間、到達時間差、到達角測量等方法在內的無線蜂窩定位技術,也提出了使用GPS 為無線蜂窩的定位提供輔助。隨著各種技術的進步,又陸續提出了藍牙定位、WLAN 定位、傳感器定位等不同的定位技術,實現移動終端的定位服務。5G 基站密度更高,支持海量連接,為無線定位提供了新的技術支持,同時自動駕駛、室內導航等5G 應用也對定位技術在精度、實時性等方面提出了更高的要求和挑戰。
隨著人工智能(AI)技術的發展,以AI 為基礎的無線定位方法也出現在各類應用中,在傳統的定位方法基礎上使用AI 技術消除模糊、提升精度,可達到更好的定位效果。基于AI 的5G 定位技術具有廣闊的應用前景。
2 無線定位技術概覽
不同的無線定位方法,依賴于不同的定位原理及不同的物理載體設備。一般情況下,無線定位方法的實施方案為:(1)若干個有真實坐標的基站、衛星或者藍牙信標等物理設備,發射無線信號用于測量未知終端,錨定所使用的地理坐標系;(2)測量信號發射端與未知終端之間的無線信號在傳輸過程中產生的差異,例如功率差、時間差、場強差、角度差等。所使用的無線信號包括但不限于衛星信號、無線蜂窩信號、WLAN 信號、藍牙信號;(3)根據第二步的測量結果,計算出移動終端在對應地理坐標系中的坐標。
綜上,無線定位方法通過一些可辨識、可區分的特點,例如距離、距離差、場強、角度等等,區分出不同的移動終端,再根據其中的信號差異或時間差異,計算出移動終端的位置。大體上,無線定位技術的原理可以分為距離、距離差、角度、信號場強等四種,以下對這四類方法進行簡要介紹。由于無線定位技術主要面向移動通信,本文重點描述基站作為信號發射端或接收端的場景。
2.1 基于距離的無線定位方法
基于距離的無線定位方法主要是根據無線信號從基站出發到達用戶設備的時間(或從用戶設備到達基站的時間)乘以光速得到用戶設備和不同基站之間的距離,然后根據圓心公式(或球心公式)計算出用戶設備位置。距離方法一般需要嚴格的時間同步,是最早出現、最為常用的一類方法。3GPP 先后從算法、測量手段、輔助設備等維度引入各種定位方法。
(1)定時提前TA:在手機接入基站的過程中,基站利用上行PRACH 得到UE 的大致距離,計算出定時提前參數TA,可用于估計移動設備到基站的大致距離[2,3,4,11]。在定時提前方法的基礎上,3GPP 又衍生出了多向定時提前方法[11]。
(2)到達時間TOA:基站接收移動終端發出的信號并測量信號到達時間,計算出基站與移動終端之間的距離,從而估算移動終端的地理坐標。03.71 協議描述了該方法。
(3)基于NR 信號的多往返時間定位:38.305 協議中提出利用移動終端測量的從多個TRP 接收的輔助數據,測量gNB 的時間差,基于往返時間計算移動終端的位置[10]。
(4)GPS 定位:通過在移動終端增加GPS 接收機實現定位。A-GPS 定位、D-GPS 定位和A-GNSS 定位都屬于GPS 定位的變種。A-GPS 在 03.71 協議中提出,將網絡中的輔助數據傳輸到移動終端,以提高GPS傳感器的性能、定位精度并減少捕獲時間[4]。D-GPS 在25.847 協議中提出,在網絡中添加已知坐標的基準接收機并對自身實施定位以獲取公共誤差,用公共誤差對移動終端的定位結果進行調整。A-GNSS 在43.059 協議中提出,可使用的衛星系統包括GPS、伽利略、衛星增強系統(SBAS)、準天頂衛星系統(QZSS)和北斗導航衛星系統(BDS)等。
(5)CELL-ID 定位:直接獲取移動終端用戶所在的蜂窩小區ID,將蜂窩小區ID 對應的地理位置信息作為該移動終端的位置[7]。25.305 協議提出了增強小區ID 方法,使用一些額外輔助信息(如定時提前TA、到達角AOA 等)輔助定位。TA 可以用于計算UE 到基站的距離,將UE 的坐標縮小到距離服務基站距離為TA*光速的帶狀區域上。AOA 可以將UE 的未知限制在個比原始扇區更窄的扇形區域。在5G 網絡中,該方法為基于NR 信號的NR 增強小區識別方法(NRE-CID),使用gNB 測量值改進移動端定位效果。這些測量值包括SS/CSI/E-UTRA 參考信號接收功率/接收質量[10]。
(6)輔助定位:3GPP 還定義了通過氣壓傳感器、運動傳感器以及地面信標系統來增強定位精度。25.305 協議提出利用氣壓傳感器,確定移動終端的垂直高度;氣壓法需要與其他定位方法相結合,確定移動終端的三維位置。25.305 協議也提出可以使用地面信標系統(TBS)定位移動終端;該系統由地面發射機組成,當前主要是城市信標系統MBS[7]。36.305 協議提出利用加速度計、陀螺儀、磁強計等不同的傳感器來計算位移。移動終端基于參考位置和/或參考時間估計相對位移,發送包含所確定的相對位移的報告,確定移動終端的絕對位置。
2.2 基于距離差的無線定位方法
基于距離差的無線定位方法的主要原理為:獲取一對基站的信號到達用戶設備的時間差,根據“到兩定點的距離為定值的動點是一條雙曲線”的幾何原理,繪制出兩條對應的雙曲線;取若干對雙曲線的交點,消除誤差,即為未知移動終端的位置。與距離方法不同,距離差方法一般不需要嚴格的時間同步。距離差方法大體上可歸納為到達時間差TDOA 和觀測時間差OTD 兩類。
(1)到達時間差TDOA:測量基站和移動終端之間,無線信號到達的時間差,乘以光速得到距離差,依據幾何原理繪制若干條雙曲線,取交點即為移動終端的位置。一般情況下,使用上行到達時間差U-TDOA,由三個或以上的基站測量終端信號[11]。在5G 網絡中,TDOA 亦分為上下行兩種,即DL-TDOA 和UL-TDOA。
(2)觀測時間差OTD:GSM 標準規定移動臺對觀測到達時間差進行測量,減去基站之間的時基差,計算終端的位置[5,13]。該方法的原理和TDOA 基本相同,某些文獻將其表述為TDOA 的一種[13]。基于OTD 有各種衍生方法:多向觀測到達時間差方法,計算移動端附近一組基站相對于服務基站的觀測到達時間差,并上報給服務基站[11]。增強觀測時間差E-OTD,用移動端中已有的時間測量功能,實現定位并提升精度[13]。
(3)觀測到達時間差OTDOA:在3G 中,OTD 發展為OTDOA,UE 測量多個基站的下行鏈路信號,計算出信號到達不同基站的的時間差及相應的距離差,推算出移動設備的位置。3GPP 協議主要提及了三種基于OTDOA的方法:①OTDOA-RNBP,在OTDOA 的基礎上,選擇一些參考點為定位提供輔助測量結果[8]。② OTDOA-PE,在OTDOA 的基礎上,基站附近的定位元件PE 發射無線信號,終端測量這些信號[8]。③OTDOA-IPDL,在OTDOA的基礎上,在一個很短的時間間隔內關閉服務基站的所有下行信號發射,提高UE 檢測到其他基站信號的概率[7]。
TDOA 及其衍生方法在移動終端測量或者基站位置測量信號。OTD/OTDOA 及其衍生方法一般由終端測量信號[7]。兩類方法的定位原理(雙曲線法/距離差)基本相同。
2.3 基于角度的無線定位方法
基于角度的無線定位方法的原理為,發射端或者接收端改造為天線陣列,使發送或接收的無線信號在不同天線之間產生一定的相位差,計算信號到達角或者脫離角;再根據三角形的相關幾何原理計算出未知設備的位置。角度方法一般包括到達角AOA 和脫離角AOD。
(1)到達角定位AOA:該方法需要接收端為天線陣列,利用不同天線接收到的信號形成的相位差,計算到達角,并確定用戶位置。到達角分為水平方向的方位角和垂直方向的天頂角,需要分別測量[8]。5G 中AOA 稱為基于NR 信號的上行到達角UL-AOA[10]。
(2)脫離角定位AOD:該方法的原理與到達角相反,需要將發射端改造為智能天線陣列,每根天線將產生一個相位差;根據相位差可以計算出脫離角,估算未知移動端的地理坐標。5G 中AOD 稱為基于NR 信號的下行脫離角DL-AOD[10]。
另外,角度方法也可用于WLAN、藍牙定位(如表2所示)。
2.4 基于場強的無線定位方法
基于場強的無線定位方法,是根據空間中的某一位置接收到的不同信號的場強建立相應的數據庫,移動終端根據當前測量值進行匹配,從而得出移動終端的大致位置。場強方法主要包括場強指紋定位和信號傳播模型定位方法,多見于藍牙、Wifi 等信號,主要用于室內定位、短距離定位。
(1)場強指紋定位(主要包括藍牙、WLAN、UWB等):
①藍牙RSSI。藍牙RSSI 定位方法,需要移動終端接收并測量來自藍牙信標的信號,根據采樣點建立的參考數據庫,未知移動終端的地理坐標[6,7,10]。
② WLAN RSSI。WLAN RSSI 定位方法,需要移動終端測量來自WLAN 熱點的信號[6],移動終端與存儲采樣點的數據庫進行比較,得到地理坐標[6,7,10]。
③信號傳播模型定位:該方法對無線信號在室內范圍的傳播衰減模型進行研究,生成定位區域的無線信號分布。移動設備在測量到若干信號值后,和指紋模型進行比較,計算出自己當前的位置。該方法一般用在藍牙系統中。
3 無線定位技術比較分析
3.1 無線定位技術分類
如上文所述,無線定位方法可以根據定位原理,分為距離、距離差、角度和場強四類方法。上述不同類型的定位方法主要區別在于信號類型、信號發射方式以及信號檢測設備的差異。此外,場強方法需要采樣。
表1 列舉了按照定位原理劃分的無線定位方法。
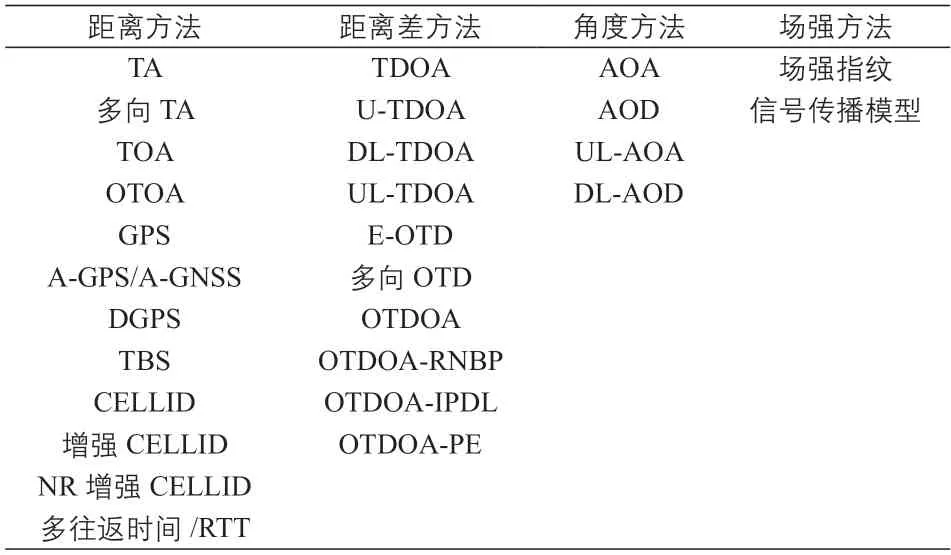
表1 按照定位原理劃分
上述無線定位方法,可以在不同的物理載體上實現,但略有一些區別。例如,衛星定位通常使用GPS 接收機,不使用TA 定時提前;無線蜂窩網絡使用小區ID 識別,WLAN 使用接入點識別,等等。一些定位方法可以跨物理載體使用,例如TDOA、AOA,可以用在無線蜂窩網絡[11]、藍牙系統[34]和WLAN[30]。一些定位方法不能跨物理載體使用,例如不能在衛星上使用CELLID 方法,因為衛星不劃分CELLID。
根據物理載體的不同,無線定位方法可以劃分為:(1)無線蜂窩定位方法;(2)衛星定位方法;(3)WLAN定位方法;(4)藍牙定位方法;(5)傳感器定位方法;(6)其他定位方法,如UWB、紅外定位、Zigbee 定位等等。如表2 所示。

表2 按照物理設備劃分
大多數情況下,無線蜂窩網絡的基站到用戶設備的距離較遠,一般使用TDOA、E-OTD 等定位方法[2,12]。而藍牙等窄帶信號在TOA 或者TDOA 上的表現不佳[32]。另一方面,WLAN、藍牙等設備與用戶設備的距離較近,常用到達角[30]、脫離角[34]、場強指紋[28]等方法。衛星距離移動設備的距離比基站更遠,一般會作為無線蜂窩網絡的輔助。傳感器設備一般不單獨用于定位,和其他定位方法結合在一起,用于確定設備的三維坐標[9]。
一般情況下,CELL-ID 定位精度比其他定位算法要低。傳感器、場強指紋、到達角等方法,可以有更高的定位精度。終端和發射端之間的幾何位置關系,對定位精度有一定影響[39]。
表3 列舉了部分定位方法在實現時的精度。

表3 定位精度
3.2 無線定位技術演進
無線定位技術的發展經歷了三個階段:(1)上世紀九十年代末期到本世紀初期,常用以定時提前、到達時間、觀測到達時間、觀測到達時間差為基礎的無線蜂窩定位技術,GPS 衛星定位技術作為輔助。(2)本世紀初期到5G出現之前,隨著其他無線技術如藍牙、WLAN、UWB 等技術的進步,出現了一批以藍牙、WLAN、UWB、地面信標系統、傳感器等為物理載體的無線定位方法,與無線蜂窩定位技術相互配合,實現移動終端的定位。(3)從5G 網絡出現至今,出現了一批以5G NR 為基礎的無線定位技術,如增強Cell-ID、UL-TDOA、DL-AOD 等方法。早期的無線定位技術,例如TOA、TDOA、GPS,多使用單一方法實現移動終端的定位。隨著WLAN、藍牙、無線蜂窩技術的發展,出現了網絡輔助的A-GPS 方法、基于參考點的OTDOA-RNBP 方法、氣壓定位或者運動傳感器定位方法等等。這些方法多使用輔助設備,配合無線蜂窩基站進行數據測量和計算。
如圖1 所示,在無線定位技術發展的早期,出現了TA、TOA、GPS、CELLID、TDOA 等技術,多用于GSM系統。在這一時期,以無線蜂窩技術為主。隨著時代的發展,又衍生出了A-GNSS、E-CID、OTDOA 等,以及以氣壓法為代表的傳感器定位技術,以AOA 為代表的角度定位技術和以RSSI 為代表的場強定位技術,用于3G 網絡。在這一時期,WLAN、藍牙等技術開始用于無線定位。4G時代大體上沿用了3G 時代的無線定位方法,略有增強。5G 網絡架構與4G 有區別,衍生出了一系列以NR 為基礎的無線定位方法。
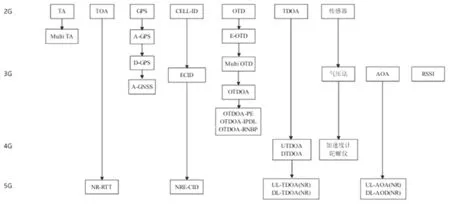
圖1 無線定位算法趨勢圖
4 無線定位算法實現方案
4.1 傳統的定位實現方法
傳統的無線定位方法,根據上述定位原理有距離、距離差、場強、角度四類,每一類方法又有不同的實現方案。按照實現方案的類型,可以劃分為:(1)解方程直接實現;(2)擬合/回歸;(3)分類/聚類;(4)概率統計。
4.1.1 解方程法
第一類是根據定位原理,構造方程(組)并使用不同方法求解,例如文獻[35]提出了一種基于TA 和PMI 值的用戶定位方法,根據TA計算出UE和基站天線之間的距離,根據PMI 計算出UE 和基站天線之間的夾角,對UE 進行定位。文獻[39]提出了一種利用多站TDOA 信息進行定位的非線性方程組求解方法,不需要進行迭代運算,直接求解。文獻[43]提出了一種基于特征值重構的到達角方法,重構信號協方差矩陣,進行特征值分解、估計信號的波達方向,實現終端的定位。上述方法涵蓋了TA、TDOA、AOA 等無線定位方案。
4.1.2 擬合/回歸方法
第二類是擬合/回歸方案。其中,擬合法包括最小二乘、泰勒級數展開、擬牛頓法等;回歸方法包括線性回歸、非線性回歸等。這些方法可以使用AI/非AI 的技術實現,本小節僅討論后者。例如,文獻[16]提出了一種基于廣義互相關和多項式擬合的TDOA 時延估計方法,將時延精度推進到亞采樣點級。文獻[36]提出了一種改進的Mean-OTDOA 算法,將終端和多個基站的測距結果的平均值作為參考距離,利用泰勒級數展開法對終端位置進行估計。文獻[37]提出了一種基于線性回歸和最小二乘的TOA 方法,用線性回歸估計距離誤差和真實距離之間的關系,運用最小二乘對終端進行定位。文獻[41]提出了一種基于線性回歸分析的定位方法,結合信號衰減模型和線性回歸理論,修正錨節點的測距模型,提升定位精度。文獻[42]使用多項式擬合方法,解決GPS定位中的高程擬合問題。文獻[46]提出了一種WiFi-RTT 定位方法,利用半參數方法構造WiFi-RTT定位的觀測模型和隨機模型,并進行了可靠性驗證。文獻[47]提出了一種線性加權的Cell-ID 方法,通過信號強度獲得各個基站的權重,對終端進行定位。文獻[53]提出了一種RSSI 定位的求解方法,將最小二乘法和無約束擬牛頓法相結合,求解未知終端的坐標。文獻[54]提出了一種三位總體最小二乘節點自定位方法,利用總體最小二乘法TLS 減小誤差,進行廣義特征值分解并計算方位角和俯仰角,對終端進行定位。文獻[55]提出了一種新的定位方法,在觀測值為到達時間差、到達角和脫離角時,使用基于觀測函數線性化的一階泰勒級數迭代法進行定位。上述方法表明,TOA、TDOA、OTDOA、RSSI、GPS、RTT、CELL-ID、AoA 等絕大部分無線定位方法,可以用擬合/回歸方法實現。
4.1.3 分類/聚類方法
第三類是分類/聚類方法,可以使用AI/非AI 的方法實現,本小節僅討論后者。例如,文獻[45]提出了一種基于信號強度與空間劃分的室內WiFi 接入點定位方法,首先采集WiFi 信號,將目標AP 所在區域分為四個區域,以二分法確定參考點,確定信號強度相對關系最大值,重復上述步驟直到定位達到期望閾值。其他的分類/聚類方法,將在4.2 小節中討論。上述方法表明,分類/聚類在Wi-Fi 等定位方法中,是一個行之有效的解決方案。
4.1.4 概率統計方法
第四類是概率統計的方法,包括但不限于極大似然估計、概率密度計算等等。例如,文獻[14]提出,在OTDOA 的測量中可以使用極大似然估計,并設計了三種方法估計信號的第一到達路徑,滿足各種實際移動信道下的3GPP 要求。文獻[38]提出了一種基于特征值融合的TOA 方法;該方法根據先驗信息,對獲取的不同天線的TOA 測量值進行卡爾曼無偏濾波、卡爾曼有偏濾波,實現誤差判別和誤差抑制,提升定位精度。文獻[52]提出了一種特征值融合的RSSI 定位方法,在RSSI 的概率分布特征基礎上,進行RSSI 不同信號特征值融合,實現定位精度優于傳統的均值指紋定位算法。文獻[27]提出了一種基于概率密度的WLAN 接入點定位方法,根據定向天線接收到的不同信號強度,計算接入點落在不同區域的概率,形成概率統計表并進行位置估計。上述方法表明,TOA、OTDOA、RSSI、WLAN 接入點等無線定位方法中,概率統計方案能發揮出一定的作用。
表4 給出了一些傳統的無線定位算法實現方案。
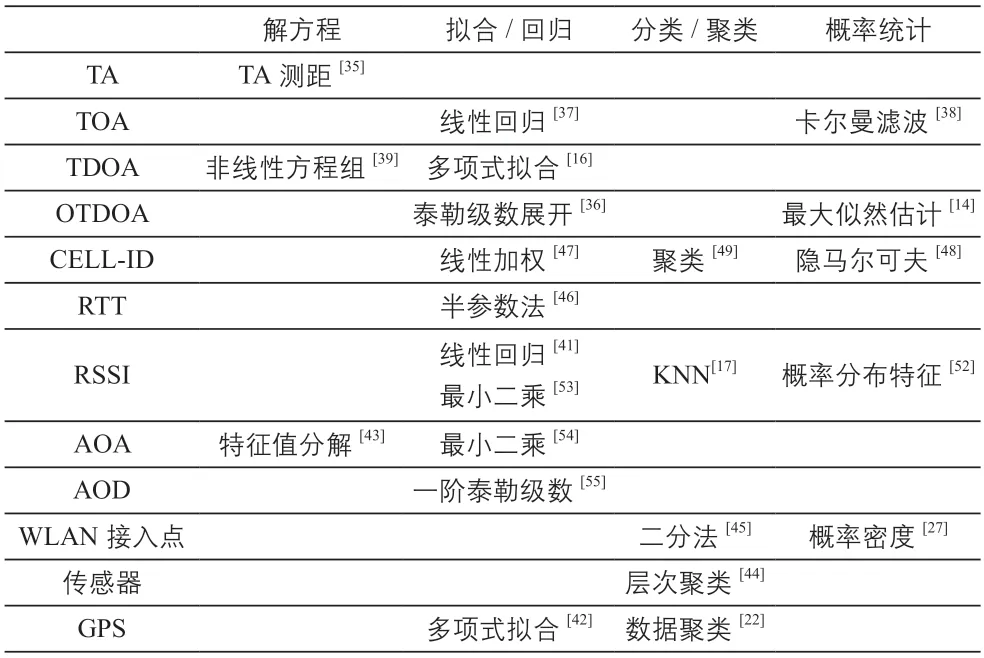
表4 按照實現方式劃分
4.2 基于人工智能的無線定位實現方案
隨著人工智能的發展,以機器學習為主的人工智能技術,在無線定位技術中得到廣泛的應用。一般情況下,人工智能的解決方案如下:(1)根據原始的無線定位方法,獲取相應數據。例如,TA 方法需要獲取定時提前數據,AOA 方法需要獲取到達角數據,TOA/TDOA 方法需要獲取測距結果。(2)根據需要解決的問題特點,選擇合適的人工智能方法。例如RSSI 場強指紋定位需要匹配數據庫,適合使用分類方法。TOA/TDOA 的原理是圓/雙曲線方程,適合使用回歸方法。一般情況下,人工智能方法由于直接使用訓練數據,可以同時擬合陰影效應、多徑效應等復雜的應用場景。(3)獲取結果坐標。
圖2 描述了基于AI 的無線定位流程。

圖2 基于AI 的無線定位流程
上述流程圖中,樣本數據是指可用于訓練的數據樣本,例如RSSI 定位方法需要測量某個點的若干個信號場強,形成場強指紋;那么一個場強指紋就是一個訓練樣本。其余方法以此類推。上述標簽是機器學習中的概念,在無線定位方法中,標簽通常是指某一條訓練數據是否具有準確坐標值。例如,如果一個RSSI 訓練樣本,同時具有若干個信號形成的場強指紋和這一處的準確坐標,則它是一個帶標簽的訓練樣本。如果只有若干個信號形成的場強指紋,則是一個不帶標簽的訓練樣本。
絕大多數基于AI 的無線定位方法都使用帶標簽的樣本進行訓練。只有少數聚類方法不使用帶標簽的數據。在實際應用中,可以輕易獲取大量帶標簽的訓練數據。如果需要獲取較高的精度,也應當使用帶標簽的數據,進行大量訓練。
包括支持向量機、分類/聚類、神經網絡等AI 方法在內,均可用于實現無線定位方案。例如,文獻[12]提出在波束形成的指紋上使用神經網絡,可以實現單錨定位。根據移動設備目標應用程序的不同,還可以使用跟蹤技術(利用短期歷史數據)來增強定位。該方案主要用于室外定位場景,平均估計誤差穩定在1.78 m 以下。文獻[15]提出了一種基于遺傳神經網絡的到達角定位方法,用于非視距傳播環境。遺傳神經網絡主要用于對AOA 測量值進行修正,以最小二乘法確定移動臺的位置。文獻[17]在傳統室內指紋定位方法的基礎上,優化了指紋數據庫并進行聚類管理,減小了在線定位時查找信息的計算量。文獻[18]提出了一種定位方法,使用BP 神經網絡取代傳統方案,建立測距模型,以消除對環境的過度依賴,適應不同的環境。結果表明該方法的性能優于經典算法,獲得了更高的定位精度。文獻[19]利用SVM 優化徑向基神經網絡RBF 的網絡權值、閾值和結點數,將訓練后的神經網絡用于TDOA 定位,結果表明該方法的精度高于Chan 算法和Kmeans 聚類。文獻[20]提出了一種免標定、無監督的信號差比(signal strength difference ratio)解決方案,將信號指紋特征去線性處理,考慮接入點的影響,使用一個包含兩個隱層、Softmax 函數的神經網絡,將傳統的基于信號強度和歐式距離的定位方案,提升了10~20%的精度。文獻[21]提出了一種基于機器學習的信息論位置驗證系統,可以在不知道信道參數的情況下,適應不斷變化的環境,對車輛進行定位。同時,該方法在遭遇惡意車輛的位置欺騙攻擊時,也具備有效性。文獻[22]提出了一種無監督機器學習的數據聚類方法,將測量數據分為視距信號和非視距信號,剔除非視距數據,采用泰勒級數展開迭代法計算終端坐標,有效地減小了非視距誤差對測量結果的影響,平均定位精度由傳統方法的10 km 提高到0.7 km,收斂時間由400 s 縮短到250 s。文獻[23]提出了一種基于神經網絡的傳感器位置估計方法,以移動終端接收到的信號強度指標(RSSI)和錨點傳感器ID 作為輸入,位置信息作為輸出,訓練神經網絡。該方法比基于質心(CL)和普通神經網絡的方法,提升了約30%的精度。文獻[44]提出了一種氣壓計輔助Wi-Fi 樓層定位的方法,包含兩階段的聚類:基于氣壓計的層次聚類和基于Wi-Fi的Kmeans聚類,利用Wi-Fi 和氣壓計讀數組成氣壓指紋,在不了解Wi-Fi基礎設施的時候可以提供定位服務。文獻[48]提出了一種基于小區標識的定位算法,利用移動臺檢測到的所有小區id(服務或非服務),以隱馬爾可夫模型(HMM)對用戶運動和測量數據進行統計建模,利用HMM 濾波器的后驗概率,采用最大后驗估計準則進行定位決策。結果表明,基于HMM 的CELLID 定位優于經典方法。文獻[49]提出了一種自適應增強CELLID 方法,首先對高精度測量值進行聚類,高精度測量值包括輔助GPS 測量、無線接入承載、往返時間等;其次,根據聚類結果計算相應的CELL 多邊形,每一個多邊形包含相同的置信度,確保建模時CELL多邊形內部的概率一致;請求定位時,該方法檢測相鄰小區,檢索并發送相應的CELL 多邊形,以實現定位功能。實驗結果表明該方法的定位效果優于傳統方法。文獻[50]的研究表明,WiFi-RSSI 建模是室內WiFi 指紋定位方法的關鍵因素。前向人工神經網絡可以方便地對WiFi-RSSI 值進行建模(基于指紋數據庫)。在人工神經網絡中,采用ReLu 或tanh 激活函數,并由sgd 或adam 訓練的神經網絡,具有較高的定位精度。文獻[56]提出了一種融合多種測量數據的神經網絡,解決了常規定位算法中使用線性最小二乘法求解非線性方程導致定位精度下降的問題。神經網絡融合的測量數據包括:到達時間(TOA),到達時間差(TDOA),到達角(AOA)。
綜上所述,支持向量機、神經網絡的AI 方法,可有效提升無線定位方法的定位精度、修正測量誤差、減少多徑效應的負面影響,處理各種復雜環境下的移動設備定位問題(如欺騙攻擊[21])。目前,基于AI 的無線定位方案,多見于TDOA、AOA、RSSI 等無線定位方法。
在實際應用過程中,包括神經網絡、聚類等方法,更適用于大規模用戶的定位方案。隨著通信技術的進步,5G將帶來更多的應用場景,例如智能穿戴設備、車聯網等,將對無線定位方法帶來更大的挑戰。
5 結束語
無線定位技術發展出了以無線蜂窩、衛星、WLAN、藍牙、傳感器等不同物理設備上使用的定位方法,設計出了TOA、TDOA、AOA、OTDOA、RTT、GPS 等一系列定位方案,以及包括人工智能在內的一系列不同的實現方法。
在2G~3G 時代,一般使用基于距離/距離差的無線蜂窩定位技術,輔以GPS 定位技術。在4G 時代,隨著WLAN、藍牙、傳感器等技術的發展,無線定位技術開始引入WLAN、藍牙等功能,并通過各種方法提升測量精度和定位精度。5G 時代,基于gNB 信號的無線定位方法開始出現,獲得進一步提高,也同時出現了一些新的應用場景及需求。
隨著人工智能技術的進步,以機器學習為代表的AI方法開始用于無線定位技術,主要用于提升精度、提升運行效率和效果,彌補原有定位方法的不足。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
