機載LiDAR高壓線塔點云自動化提取
2021-10-12 04:45:42譚弘武王敬茹劉武能劉麗龍習曉環
遙感信息 2021年4期
譚弘武,王敬茹,劉武能,劉麗龍,習曉環
(1.北京煜邦電力技術股份有限公司,北京 100029;2.中國科學院空天信息創新研究院 數字地球重點實驗室,北京 100094;3.云南電網有限責任公司迪慶供電局,云南 迪慶 674400)
0 引言
機載激光雷達(light detection and ranging,LiDAR)可直接快速獲取高壓輸電線路高密度、高精度三維空間信息[1-2],為高壓線塔空間定位和三維建模提供可靠的數據源[1],也為輸電線路資產數字化管理和安全巡檢提供強有力的技術支撐[4-6]。
從機載LiDAR數據快速、精確提取高壓線塔點云是其三維數字化重建的基礎。早期輸電線路地物點云分類研究更多關注電力線點云的快速高精度提取和三維數字重建[7-8],目的是為線路安全、增容分析、大風覆冰等預警模擬提供支撐[9-12]。近年來,隨著無人機和激光雷達系統性能的飛速提升,機載LiDAR飛行方式靈活多變、作業水平顯著提高,能夠獲取高壓線塔高密度、高精度的完整三維信息,關于高壓線塔點云提取、數字化重建等方面的研究也逐漸增多。彭向陽等[13]根據輸電桿塔在激光點云中具有高密度、大坡度、大高差特征,提出了一種基于二維格網多維特征分析的輸電桿塔自動定位方法;Li等[14]對點云濾波后包含的電力線點、電塔點和少量的噪點(地面點、植被點等)作垂直投影,根據投影后的點云密度和高程變化來確定桿塔點云及其位置。然而以上兩種方法只能定位桿塔,無法實現桿塔的自動精細化提取。為從輸電線路點云中提取完整的桿塔點云,韓文軍等[15]通過計算電力線連接點的位置,生成三維立方體外包來提取桿塔數據點;虢韜等[16]將點云投影到水平面上并進行格網化,采用區域增長算法聚類包含桿塔的網格數據,利用一定高度上的電塔點云垂直投影的面積、電塔塔頭長度閾值等過濾掉不符合要求的數據,得到獨立的電塔點云。但以上兩種方法只能粗提取桿塔,提取結果仍包含植被和電力線等雜點,需人工進一步剔除。
本文充分分析高壓線塔空間拓撲特性與點云幾何分布特征,提出適用于多種類型的高壓線塔點云自動化精確提取算法,并用實驗驗證該算法的有效性和精度。
1 方法
1.1 高壓線塔點云數據粗提取
首先,基于輸電線路點云數據和高壓線塔中心位置,采用Kd樹距離分割法將桿塔點云從輸電線路點云中分離;然后,利用歐氏聚類算法剔除桿塔點云周圍噪聲;最后,基于移動曲面擬合算法[17]和空間格網區域向下生長算法剔除桿塔底部地面點及其周圍雜點。流程如圖1所示。

圖1 線塔點云數據粗提取流程圖
1.2 高壓線塔點云數據精提取算法
根據高壓線塔空間結構特征將其分為塔頭和塔身兩部分。首先,通過分析線塔長寬比例-高度直方圖識別塔頭和塔身的關鍵分割位置;其次,基于空間格網區域向上生長算法去除塔頭周圍的電力線與絕緣子串等點云,得到塔頭點云;然后,利用RANSAC直線擬合算法剔除塔身周圍植被點云,得到塔身點云;最后,整合塔頭塔身即得到線塔點云。流程如圖2所示。

圖2 線塔點云精提取流程圖
1)關鍵分隔位置識別。通過線塔點云重定向和垂直分層,繪制線塔的長寬比例-高度直方圖,并基于其空間幾何特征在直方圖中識別關鍵分割位置。
線塔點云在水平面上常表現為任意方向,為便于后續操作,將其沿Z軸旋轉一定角度θ。由于線塔水平方向取決于塔頭,可將塔頭點云投影至XY平面并均勻采樣,然后利用主成分分析(principal component analysis,PCA)求解點云的特征值和特征向量,將最小特征值對應的向量V(v1,v2)記為X′軸,利用式(1)計算旋轉角度θ和旋轉后的點坐標(x′p,y′p)。
(1)
沿Z軸將線塔點云垂直分為等間隔的若干層,每層為一個包圍盒。從圖3可看出,塔頭投影形狀近似為矩形,塔身投影近似為正方形。為避免塔底植被的影響,設定高程閾值T,依次向上計算每層包圍盒在水平面投影的長度Δx與寬度Δy之比ratio,繪制線塔長寬比例-高度直方圖(圖4)。若ratio大于比例閾值則計算停止,并將該層記為線塔的關鍵分隔位置。該位置以上的點云標記為塔頭點云,以下的點云為塔身點云。通過后續操作,分別對塔頭和塔身點云數據進行精細化提取。

圖3 高壓線塔投影
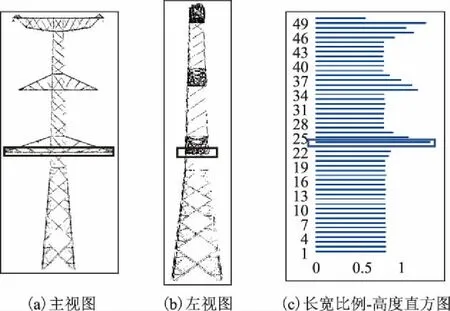
圖4 高壓線塔投影及長寬比例-高度直方圖
2)塔身點云提取。塔身包括四條主要棱線,通過擬合棱線來提取其內部的塔身點云,該過程分為兩步。一是提取每層長方體包圍盒底面的四個頂點;二是將每條棱線上的頂點擬合為直線,并提取四條棱線構成的塔身框架內部點云。
首先,用凸包算法構建每層包圍盒輪廓多邊形;然后,利用管道算法簡化輪廓多邊形以檢測角點,根據角點相對于最小包圍矩形中心的方向將其分割為四個子集,每個子集可以近似地描述為三維直線[18],利用RANSAC擬合塔身的四條棱線即可形成塔身的框架。遍歷線塔關鍵分隔位置以下點云,若數據點在框架內部,則記為塔身點,否則記為雜點并予以剔除。如圖5所示,圖5(a)為經RANSAC算法擬合得到的空間直線點;圖5(b)為精提取塔身點云數據。
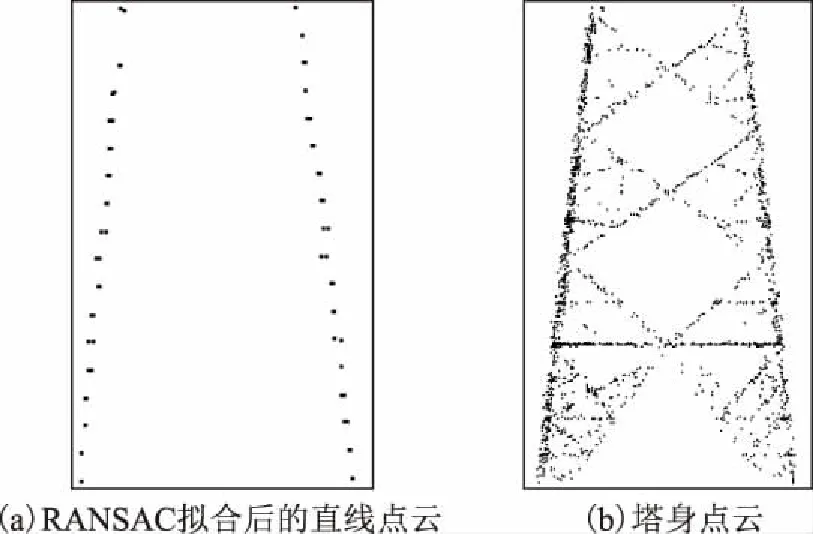
圖5 高壓線塔塔身棱線擬合示意圖
2 實驗結果與分析
實驗數據為2019年9月利用Riegl VUX1無人機LiDAR系統采集,地點為國網廣西段某超高壓輸電通道,長度為52 km,包含118個線塔,平均點密度為每190 點/m2。表1為激光雷達系統與飛行作業的具體參數。

表1 數據詳細信息
2.1 實驗結果
選取研究區域內T型塔、門型塔與O型塔三種典型塔形進行實驗,主要參數設置包括分割半徑15 m、格網尺寸1 m×1 m×1 m、垂直分層間隔1 m。圖6(a)、圖6(b)和圖6(c)分別為T型、門型和O型塔點云提取過程。其中,①為原始點云;②為利用移動曲面擬合算法進行底部濾波后的點云,該方法能夠很好剔除地面點,并將線塔底部點與周圍植被點分離,避免后續區域生長時將植被點生長到線塔點云中;③為經過空間格網區域向下生長的線塔點云,可有效分離線塔與周圍植被點;④為經過空間格網區域向上生長的線塔點云,剔除了塔頭的電力線和絕緣子串等非高壓線塔點;⑤為經過RANSAC直線擬合后的線塔點云,剔除了與線塔塔身相連的植被點;⑥為塔頭和塔身整合后的線塔點云。

圖6 高壓線塔提取過程示意圖
2.2 定量分析
通過比較線塔點云數據的特征(線塔相對高度H)、粗提取的線塔點云數目N、經過人工分類得到的線塔點云數目N人、本文自動提取算法得到的線塔點云數目N塔、除塔自身點以外的其他地物點數目N非塔和算法效率等指標評價本文算法的性能。同時為對比不同密度點云數據的應用效果,選取了另一段線路的T型塔(記為T型塔2)進行對比分析,將之前線路的T型塔記為T型塔1,對比結果如表2所示。總體來說,本文方法提取的線塔點云正確率達到了95%以上,平均每個塔提取時間約2 s,完全滿足長距離輸電線路線塔快速提取的應用需求。

表2 高壓線塔點云數據實驗結果
2.3 高壓線塔提取結果比較
與文獻[19]高壓線塔提取結果對比,文獻[13]提出的方法能從輸電線路中提取出高壓線塔點云數據,但仍存在以下問題:①提取高壓線塔主干部分點云時,直接利用經驗值判斷高壓線塔主干區位置,即將高壓線塔下方5 m以及上方5 m之間的點直接判定為主干部分點云(如圖7(a)陰影所示),但這種方法對于塔頭與塔身之比較大或所處地形起伏較大的高壓線塔(圖7)而言,該范圍并不是線塔主干區域,因此這種方法具有一定的局限性。②求取每層高壓線塔寬度與其高度之間線性關系的操作,僅適用于塔身周圍沒有植被干擾的情況;一旦塔身周圍有植被干擾,則在求高壓線塔寬度時易把植被點云當做高壓線塔塔身點云進行計算,極大地影響計算結果(圖7(b))。③沒有去除高壓線塔上部電力線、電力懸線及絕緣子串等非高壓線塔點云數據(圖7(c))。

圖7 多因素干擾的高壓線塔提取
綜上,本文提出的高壓線塔自動化提取方法能夠有效避免預設經驗值和高壓線塔周圍植被對提取結果的影響,并可剔除線塔塔頭電力線點云數據,得到精細化提取結果。
3 結束語
本文提出了一種高壓線塔自動精細化提取方法,并通過實驗驗證了算法的精度與適用性,為后續線塔三維數字重建及輸電線路數字化管理等提供重要的基礎數據。不足之處在于,使用空間格網區域向上生長算法剔除電力線點云時,當電力線高度與高壓線塔橫擔高度相等時,易將該部分電力線點云誤判為高壓線塔點云。此外,復雜地形區域的塔腳內部噪聲點剔除效果不佳,需進一步分析塔腳分界面與線塔結構之間的關系,建立約束條件來剔除。在后續研究中仍需對線塔細節部分的提取進行優化,如顧及局部點云結構特征等,進一步提高算法的準確度與穩定性。