無人機傾斜攝影進行建筑施工進展監測初探
2021-10-12 04:45:42朱凌孫偉倫周克勤
遙感信息 2021年4期
朱凌,孫偉倫,周克勤
(北京建筑大學 測繪與城市空間信息學院,北京 100044)
0 引言
近幾年,隨著我國經濟的快速增長,建筑業也得到了飛速發展。2019年全年國內生產總值990 865億元,全年全社會建筑業增加值70 904億元,占比7.16%,較去年上升0.04個百分點[1]。隨著建筑業的發展,項目管理體系也在不斷完善,進度管理作為項目管理的主要方面之一,其管理水平的高低關乎建筑行業的良性發展[2]。
項目進展監測管理是指在項目進行過程中不斷監控項目的實際進程,收集反映項目進度實際狀況的信息,掌握項目動態,確保每項工作按計劃進行[3]。
目前,項目進展管理還存在許多不足,對建筑物施工進度監測的方式主要有五種。一是人工記錄[4]為主的傳統方式,通過現場巡視并與計劃表進行對比。這種方法耗財耗時耗力,往往具有嚴重的滯后性和主觀性。二是利用地面激光雷達(light detection and ranging,LiDAR)點云進行監測[5-7]。LiDAR點云需要從多個站點獲取及后處理拼接,技術含量高且存在掃描漏洞,點云密度分布不均勻,在三維空間中不連續分布,且數據采集成本高。三是建筑信息模型(building information modeling,BIM)對比輔助[8-11]。施工現場信息變化快,BIM 模型往往容易脫離現場實際情況。四是傳感器追蹤[12-15]。這種方式工作量大,時間成本高,且獲得信息形式單一。五是基于傳統豎直攝影測量的變化檢測方式檢測高程或面積變化[16-18]。該方法難以展示建筑物的側面信息,無法準確描述任意時刻任意位置的建模對象屬性信息。
傾斜攝影測量技術是近幾年發展起來的攝影測量技術,利用載有多鏡頭相機的飛行設備從多個角度對測量區域進行拍攝,突破了傳統的正射影像無法直觀體現目標地物側面真實紋理的缺陷,能夠應對更復雜的情況,應用范圍更廣[19-22]。
傾斜影像點云來源于傾斜攝影測量的內業處理成果,相對于LiDAR點云,其具有密度靈活可控、獲取成本低以及數據分布規則連續等諸多優勢[23-24]。
為更方便表示和量化計算建筑物三維模型及體積變化,本文采用體素(voxel)模型。體素是體積元素(volume pixel)的簡稱,是組成三維空間的最小規則單元,相當于二維空間中像素的概念。相對于面模型,體素模型(voxel model)能夠更詳細地描述物體的各形狀要素信息,結構簡單,格式統一[25]。
綜上,針對現有的施工進度監測方法存在的不足,本文嘗試采用無人機傾斜影像數據,以體素模型表達建筑物形體。本文采用的方法有數據采集成本低、傾斜影像包含建筑物側面詳細紋理信息、傾斜影像點云密度均勻,以及體素模型結構簡單排列規則便于后續分析、處理等諸多優勢。監測過程中記錄的數據包括原始影像、點云、體素、五視圖,可詳盡記錄施工現場各階段狀況,監測施工進程,指導和協調項目進度管理。
1 實驗數據
采用北京市大興區某施工工地的無人機傾斜影像,以一棟在建五邊形建筑物的兩期影像為例,分別拍攝于2018年12月19日和2019年4月19日,時間間隔為4個月。目標建筑物施工過程中的兩張照片如圖1、圖2所示。圖1顯示,建筑物左邊梯形部分已經澆筑完成,顯示白色水泥頂,右側四邊形部分為在建狀態,露出鋼筋疊合板,下側地面無建筑物。圖2顯示,建筑物右側四邊形部分已經封頂,下側新增兩條走廊,一條走廊基本建成,另一條走廊在建。

圖1 第一期施工現場

圖2 第二期施工現場
2 方法
2.1 技術路線
采用點云體素轉換算法生成兩期體素模型,分別進行內部體素化。通過比較兩期實心體素模型,獲得在建建筑的幾何變化部分。同時,賦予體素模型相應的顏色信息,生成五視圖,再對五視圖的圖像信息進行分類、對比提取變化,得到五幅差值圖。最后,針對每個視圖的變化區域,通過統計變化類型方法,綜合二維、三維變化以及施工計劃表從而獲取更加準確的在建建筑物結構及表面從無到有、從有到無及高度增減等變化信息。實驗流程如圖3所示。
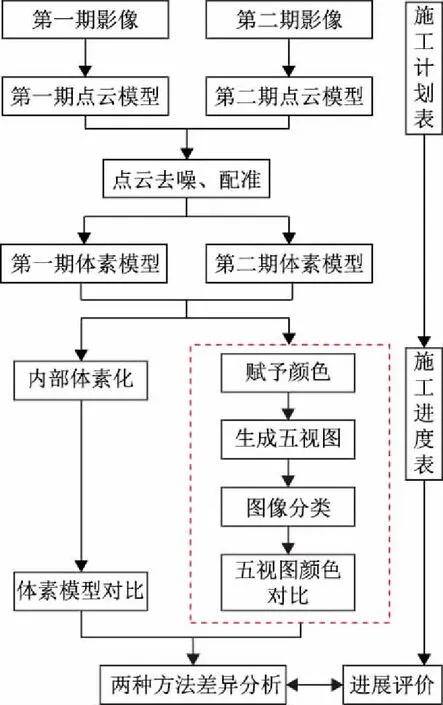
圖3 實驗流程圖
2.2 點云的體素化
三維空間中,每個點云點都存在體素與其對應。針對點云數據,實現體素化步驟如下。
1)確定點云數據在X、Y、Z三個坐標方向上的最小值和最大值xmin、ymin、zmin、xmax、ymax、zmax。
2)根據點云分辨率,選擇合適的體素分辨率。
3)確定點與體素的對應關系。首先,定義一個三維零矩陣,根據點云數據中每個點的三維坐標(x,y,z),按式(1)計算對應的體素坐標,將三維矩陣中相應位置的元素值設為1,遍歷所有點即完成點云的體素化。
(1)
式中:INT表示向下取整;(i,j,k)表示體素坐標;res表示體素分辨率。根據上述步驟可以實現空間點的快速體素化[26]。
2.3 模型內部的體素化
由于傾斜影像生成的點云位于物體外表面,內部不存在點,根據式(1)進行的體素化僅為模型表面體素化,生成的模型為空心體素模型。為了進行在建建筑施工進展對比,需要實心體素模型。本研究在體素化的基礎上進行內部體素化,得到一個完整的實體。
空心體素模型的內部體素化分以下三步。
1)判斷三維矩陣內,當(i,j)確定時,是否存在k值,對應元素1。
2)確定最大k值。若存在k值,則表示對應一個或多個元素1,由此確定最大k值。遍歷三維矩陣第一頁的行列值(i,j),得到kmax的集合。
3)內部體素化。根據行列值(i,j),依次生成[k=1,k=kmax]區間內的體素,實現模型的內部體素化。
由于常規建筑物鉛垂于地面,因此建筑側立面可認為與豎軸方向平行,上述模型的內部體素化適用于常規建筑物[27]。
2.4 點云與體素分辨率的選擇
在影像點云獲取中,點云分辨率越高,點云模型越逼真,但分辨率過高,會增加數據量,降低數據處理的效率。合適的點云分辨率[28]可根據式(2)確定。

(2)
式中:Q表示點云質量;m為掃描物體表面的點云分辨率;λ為物體表面的最小特征尺寸。Q<0,表示不合適,認為點云分辨率低于物體表面最小特征尺寸,不能較高程度地還原被掃描物體;Q>0時,表示合適。例如Q=0.5,表示物體表面細節能被識別的信任度達到50%。
體素分辨率指的是小正方體的邊長。體素分辨率越高,數據量越大,運算速度越慢,表示的模型的細節越豐富。若體素分辨率高于點云分辨率,生成的模型存在空隙,若低于點云分辨率又會丟失細節信息。為降低建筑物三維模型的數據量,同時又保證更精確完整還原建筑物,體素分辨率應相近于點云分辨率[29]。
2.5 兩期體素模型的對比提取三維變化
兩期體素模型的比較,實質是兩個不同維度的三維矩陣相減,從而得到發生變化的體素部分。步驟及原理如下。
1)確定兩個三維矩陣的最大行、列、頁數,即最大l、m、n值。
2)擴展為相同維度的三維矩陣。由于不同維度的矩陣無法相減,所以要實現對應位置元素相減,需要將兩個維度不同的三維矩陣擴展為維度相同的三維矩陣。以最大l、m、n值為三維矩陣的行、列、頁數,定義兩個三維零矩陣A和B,再把兩個三維矩陣的元素賦值到矩陣A、B的相應位置上,即完成不同維度矩陣的擴展。
3)三維矩陣相減。第一期體素模型的三維矩陣A,矩陣元素只定義數字0和1,0表示不存在體素,1表示存在體素;第二期體素模型的三維矩陣B,矩陣元素只定義數字0和2,0表示不存在體素,2表示存在體素。用擴展后的第二期三維矩陣減去第一期三維矩陣,有四種結果,分別是2、1、0、-1。2表示第二期相對于第一期增加的變化部分,1表示沒有發生變化的部分,0表示沒有意義,-1表示第二期相對于第一期減少的變化部分。
2.6 賦予體素模型表面顏色
采用Photoscan生成影像點云,點云點的屬性分別是x、y、z坐標和R、G、B顏色。其中,R、G、B表示點云的紅、綠、藍波段灰度值。體素模型的顏色信息來源于點云,如圖4所示,由于點云與體素分辨率接近,每個體素內分布有一個或多個點云,將位于體素內點云的顏色R、G、B值取平均,即為體素的顏色,如式(3)所示。
(3)
式中:R、G、B分別表示體素的紅、綠、藍波段灰度;r(k)、g(k)、b(k)分別表示第k個點云的R、G、B波段灰度值;k表示一個體素內點云的個數。
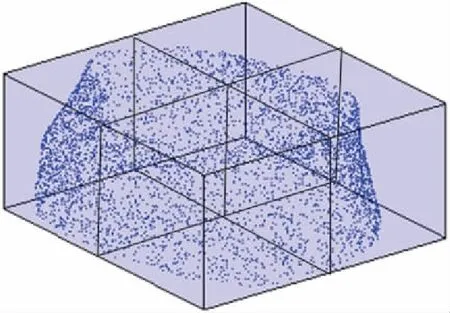
圖4 點云體素位置示意圖
2.7 生成建筑物五視圖
五視圖指建筑物的俯視圖、前視圖、后視圖、左視圖、右視圖,從建筑物體素模型的上部和前后左右五個方向分別進行正射投影獲得。
定義體素的六個面分別是上面片、下面片、前面片、后面片、左面片、右面片。以俯視圖為例介紹獲取方法。
1)判斷三維矩陣中元素1的位置,即當i、j值確定時,是否存在k值。
2)若存在k值,則表示存在一個或多個體素,通過比較得到最大k值,即確定為i、j、k對應的頂部體素。
3)頂部體素的上面片,即為構成俯視圖的一個面片。
4)根據2.5節,把體素的顏色值賦予體素的上面片,其余五個面不予顯示,遍歷所有i、j、k值,得到俯視圖。
2.8 五視圖影像變化檢測
五視圖差異影像可以反映在建建筑二維變化信息,在外墻體刷漆、抹灰、貼瓷,爬架網片架設與拆除等施工類別下,二維角度可展現出三維變化檢測無法表現的施工進展情況。
本實驗采用面向對象分類方法,對兩期五視圖的影像信息分別進行圖像分割、圖像分類,然后采用分類后比較法,對變化部分進行統計,最后得到五視圖變化結果。
3 實驗
3.1 生成點云
首先,采用photoscan1.4.5軟件對兩期傾斜影像進行處理,生成點云模型。由于目標建筑物的最小特征尺寸接近于0.1 m,所以對點云模型的分辨率設置為0.1 m。生成的兩期點云模型如圖5、圖6所示。采用cloud compare 2.9對兩期點云模型進行裁剪、去噪、配準等處理。
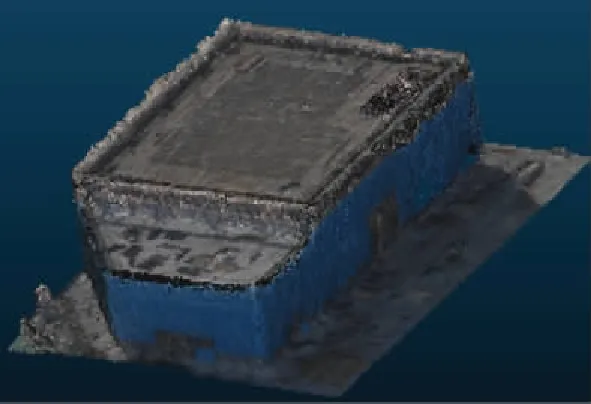
圖5 第一期點云模型

圖6 第二期點云模型
3.2 體素模型對比提取三維變化
分別對兩期點云進行體素化。因為點云分辨率為0.1 m,為使體素模型更完整地還原目標建筑物,體素分辨率略低于建筑物的最小特征尺寸,即體素分辨率應低于點云分辨率,所以選取0.2 m做為體素分辨率。點云體素轉換算法生成的體素模型為空心體素模型,根據上文的內部體素化方法,生成兩期實心體素模型,如圖7、圖8所示。
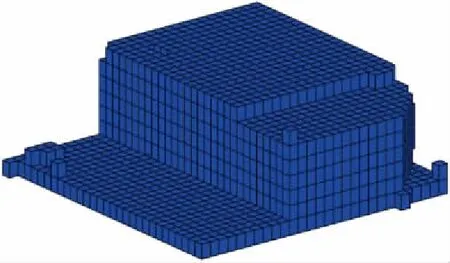
圖7 第一期體素模型
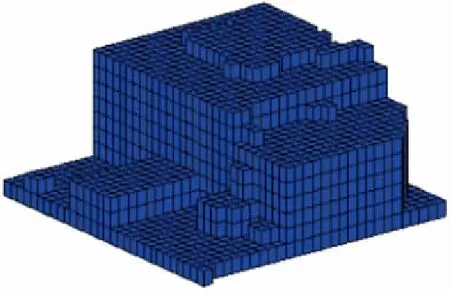
圖8 第二期體素模型
對兩期體素模型做比較,得到在建建筑物的體素模型的第二期相比于第一期的增加、減少、無變化部分,體素差異模型如圖9所示。
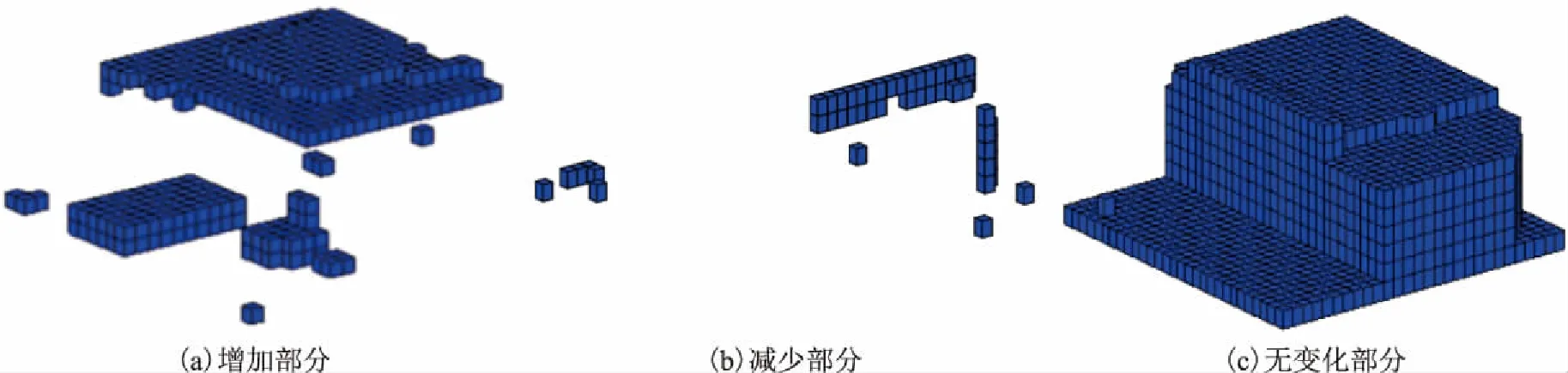
圖9 體素差異模型
3.3 五視圖的實驗結果
由于傾斜影像糾正獲取五視圖需要多次實地采集建筑物的多個特征點坐標,工作量大,而從體素模型獲取五視圖方便快捷。為更逼真地獲取體素顏色信息,選取體素分辨率為0.15 m,得到建筑物的兩期五視圖,如圖10所示。
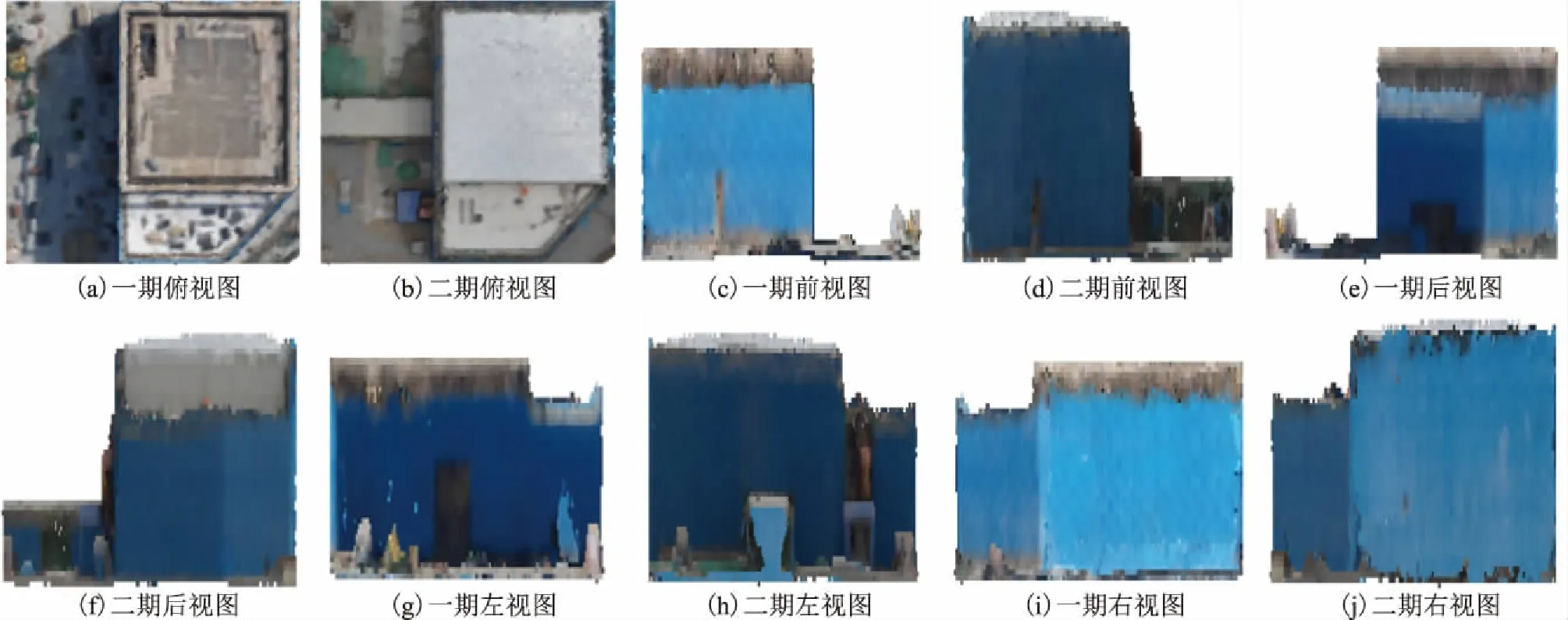
圖10 兩期體素模型的五視圖
采用ENVI 5.0軟件對影像進行對象化及分類,各類別顏色信息見表1,分類后兩期五視圖如圖11所示。

表1 分類信息表
對分類后的兩期五視圖分別進行變化檢測,得到五幅差值圖,如圖12所示。因采用分類后比較法進行變化檢測,每幅視圖的變化類型多達56種,例如從背景變化為水泥墻面、從鋼筋砼變化為樓頂等,不再依次贅述。從圖11、圖12可以看出,由于施工現場各種物體堆放復雜多樣,以及無人機航拍時太陽高度角造成的陰影等影響,在建建筑物各表面的變化信息細節雜亂。為降低多種因素對五視圖變化檢測的影響,這里采用數量統計的方法,以反映出各表面的大致變化情況,進而實現施工進程的量化監測。

圖11 面向對象分類后的兩期五視圖
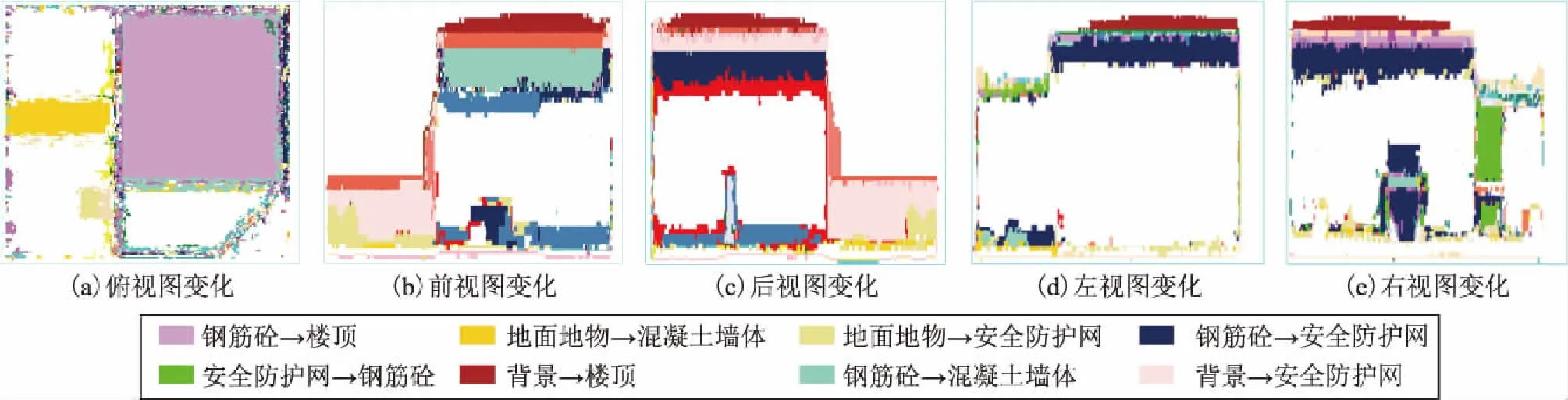
圖12 五視圖變化結果
統計每個表面每種變化類型的數量。統計發現,在每幅視圖的56種變化類型中,大約50種變化類型的面積占比不到1%,可視為誤差。選定每幅視圖變化面積占比最大的前三個變化類型進行表述。由于俯視圖與四個側視圖的背景不同,這里單獨統計,結果見表2,其他視圖統計結果見表3。

表2 俯視圖變化表 %

表3 四個側視圖變化表 %
3.4 結果分析
根據體素差異模型可以得出,從2018年12月19日至2019年04月19日,共四個月的施工期間,目標建筑物的施工進展如圖9(a)所示,包括建筑物封頂、建筑物左側面的已建成走廊和在建走廊。根據圖9(b)可以得出,差異模型的減少部分有建筑頂層藍色安全防護網、施工腳手架的拆除,以及施工現場某些地面設備的移動。圖9(c)為四個月時間段內,一直沒有產生變化的部分,即2018年12月19日以前建成部分。
根據五視圖的變化圖像可以得出,俯視圖的主要變化類型有鋼筋砼變為樓頂、地面地物變為水泥墻面,如圖12(a)粉紫色與黃色區域,其變化與圖9(a)相吻合。前視圖、后視圖的主要變化類型為背景變為樓頂、背景變為安全防護網等,如圖12(b)、圖12(c)褐色與淺粉色區域,表示建筑物封頂和已建成走廊。左視圖、右視圖的主要變化類型為鋼筋砼變為安全防護網、背景變為樓頂等,如圖12(d)、圖12(e)褐色與藍色區域,表示建筑物封頂、安全防護網隨建筑物高度的增加而增加。
根據工程監理方提供的施工計劃表和施工進度表(圖13、圖14)可以得出,5號樓第1期月報共計劃施工60個工作日,但截至航飛日期,仍需9個工作日完工,施工任務未如期完成。

圖13 施工計劃表
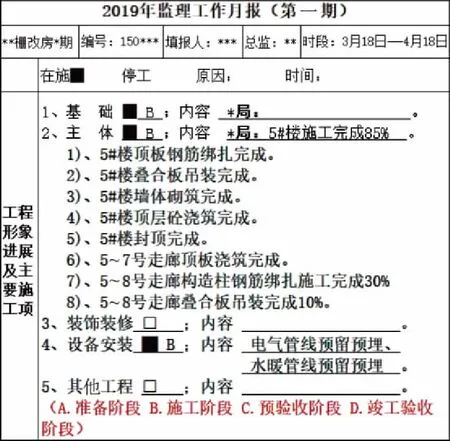
圖14 施工進度表
通過對比體素差異模型、五視圖變化圖像與項目管理報表得出,計劃表顯示截至到4月15日,5號樓、5~7號走廊、5~8號走廊的主體部分應全部建成。實際進度中,5號樓、5~7號走廊的施工現場在二維與三維方面的進度變化一致,彼此吻合,但5~8號走廊由于未知原因,并未按計劃完成。
本文采用體素模型與五視圖能夠表現出建筑物的真實三維變化信息,反映模型的內部及側面情況,且結構簡單,直觀顯示三維。結合施工進度表得出在四個月內5號樓總施工完成85%,進度延誤15%。
4 結束語
本文實現了基于體素模型的自動化、定量化的建筑施工進度監測方法,改善了傳統方法主觀性和缺少影像、點云等現狀記錄的不足,初步探討了點云模型的體素化、兩期體素模型對比以及五視圖變化檢測的整體流程和思路。實驗表明,體素模型可以較好地還原建筑物的三維模型;體素差異模型可以得到施工過程中,建筑物加高、拆除,以及未變化的部分,結果一目了然,人工干預少;五視圖差值圖像可以彌補體素差異模型無法檢測二維變化的缺陷,快速及時、成本低、效率高。通過與項目報表對比,結果表明,基于體素與五視圖的施工監測能夠宏觀地展現建筑施工進度情況,適用于規則建筑物的施工進展監測,提出的方法對工程項目進度管理進行了定性的驗證與指導。
目前的內部體素化方法還無法滿足復雜建筑物的內部建模需求。今后的研究重點是改進內部體素化方法以及實現施工進度管理的精度評價等問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
核科學與工程(2015年4期)2015-09-26 11:59:03