無線傳能效率最優(yōu)化方案與效能檢測裝置設(shè)計(jì)
2021-10-13 10:24:34張澤恒劉殿翔梁宗威蘇日清黃楠興陳培煬李偉華通信作者
電子制作 2021年19期
張澤恒,劉殿翔,梁宗威,蘇日清,黃楠興,陳培煬,李偉華(通信作者)
(1.暨南大學(xué)國際能源學(xué)院,廣東珠海,519070;2.暨南大學(xué)軌道交通研究院,廣東珠海,519070)
0 研究背景
隨著電磁學(xué)理論的不斷完善與實(shí)踐中的不斷運(yùn)用,生活中利用無線傳能的場景越來越多。許多產(chǎn)業(yè)也利用無線技術(shù)對其生產(chǎn)進(jìn)行改進(jìn)[1]。
電動(dòng)汽車作為新型能源產(chǎn)業(yè)之一也逐漸興盛起來,新能源汽車的充電問題一直備受人們關(guān)注,針對無線充電方式中原副線圈無法精準(zhǔn)對接導(dǎo)致效率低下的問題,諸多學(xué)者給出了一些方案。
文獻(xiàn)[2]中提出:通過雙目視覺系統(tǒng)收集停車位圖像并進(jìn)行預(yù)處理,在圖像中收集LED的位置,將對準(zhǔn)數(shù)據(jù)與給定數(shù)據(jù)進(jìn)行比較,獲得對準(zhǔn)參數(shù)并實(shí)現(xiàn)對齊。該方案易受可見光的影響,并且對空間數(shù)據(jù)處理方法復(fù)雜。
文獻(xiàn)[3]中提出:以初級線圈的中心為原點(diǎn),并在次級線圈的平面中劃分嚙合的參考點(diǎn)。通過將感應(yīng)電壓的曲線與距離擬合,可以得出坐標(biāo)計(jì)算公式,從而實(shí)現(xiàn)對接。該方案需設(shè)置次級線圈,增加損耗且電路設(shè)計(jì)困難。
如圖1所示,前序課題中提出:通過激光測距、陀螺儀與定位感應(yīng)板技術(shù)使汽車在泊車位隨意停車后,地面下的無線充電裝置可以通過光學(xué)定位算法自動(dòng)找到給電動(dòng)汽車充電的最佳位置,從而實(shí)現(xiàn)對接。但其光學(xué)器件數(shù)量直接決定其數(shù)據(jù)精度,實(shí)用化困難。
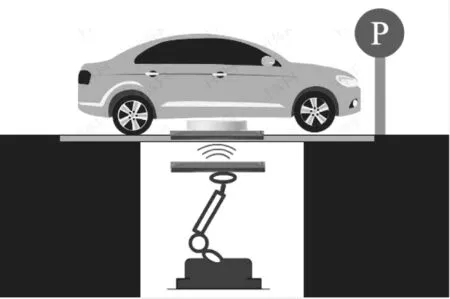
圖1 電動(dòng)汽車無線充電裝置概念圖
1 效率最優(yōu)化方案
方案主要利用驅(qū)動(dòng)裝置來驅(qū)動(dòng)原邊線圈按照一定路徑進(jìn)行運(yùn)動(dòng),并在過程中通過電路檢測電流的信息,將得到的信息利用算法進(jìn)行處理后,轉(zhuǎn)化為對驅(qū)動(dòng)裝置的控制指令,從而驅(qū)動(dòng)驅(qū)動(dòng)裝置繼續(xù)搜索更優(yōu)的數(shù)據(jù)點(diǎn),直到找到最佳充電點(diǎn)。因此將方案分為“原邊線圈的驅(qū)動(dòng)、最佳充電點(diǎn)搜索、電流信息的采集及確定最佳充電點(diǎn)”展開。
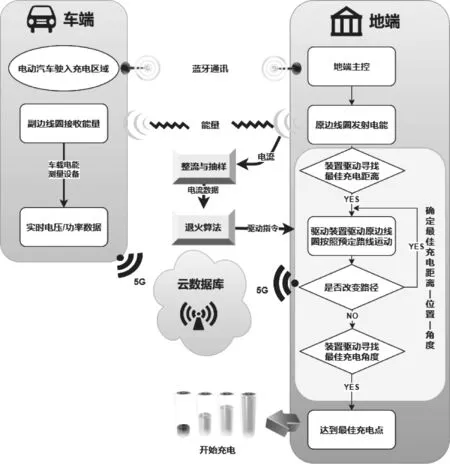
圖2 電動(dòng)汽車無線充電裝置概念圖
1.1 原邊線圈的驅(qū)動(dòng)
為了使驅(qū)動(dòng)裝置可以帶動(dòng)原邊線圈在三維空間中按照指定路徑運(yùn)動(dòng),并且可以調(diào)整預(yù)定的角度。項(xiàng)目組利用三個(gè)步進(jìn)電機(jī)(見圖3)配合導(dǎo)軌支架來實(shí)現(xiàn)原邊線圈在任意點(diǎn)(X,Y,Z)的運(yùn)動(dòng);用兩個(gè)舵機(jī)組成的一個(gè)半球面(XY360°-Z180°)角度調(diào)節(jié)裝置,使原邊線圈可以進(jìn)行任意角度的調(diào)節(jié)。項(xiàng)目利用STM32單片機(jī),將位置信息(X,Y,Z)轉(zhuǎn)化為電機(jī)和舵機(jī)轉(zhuǎn)速和角動(dòng)量等信息,實(shí)現(xiàn)對電機(jī)和舵機(jī)的控制。

圖3 步進(jìn)電機(jī)(42CM04)及驅(qū)動(dòng)套件
1.2 最佳充電點(diǎn)搜索
在原邊線圈可以實(shí)現(xiàn)各個(gè)位置和角度的移動(dòng)后,原副線圈的垂直距離和對接角度可以通過升降原邊線圈及控制兩個(gè)舵機(jī)實(shí)現(xiàn)。而對于副邊線圈平面位置的確定,需要設(shè)定搜索副邊線圈或最佳充電點(diǎn)位置的方法。
1.2.1 搜索范圍
在原邊線圈搜索最佳充電位置的過程中,如果把停車位所有點(diǎn)都遍歷一遍,不僅效率低下,而且浪費(fèi)了大量能量。根據(jù)無線充電的特點(diǎn),結(jié)合圖4進(jìn)行分析。
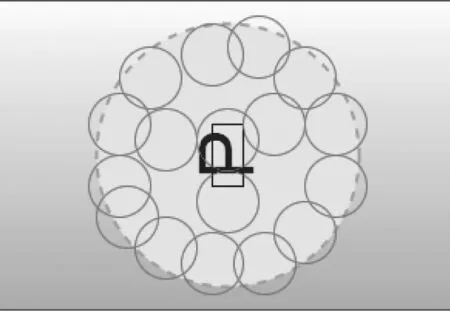
圖4 蒙特卡洛模擬充電有效區(qū)域
如圖4所示,由于停車位置與車體構(gòu)造的限制,電動(dòng)汽車可接受充電的區(qū)域一般是有限的。而項(xiàng)目組想通過一種手段得知這個(gè)有限的區(qū)域的大致范圍與位置。
利用蒙特卡洛模擬方法,通過在整個(gè)停車區(qū)域(灰色區(qū)域)大量的實(shí)驗(yàn),將落點(diǎn)(紅色透明圈)出現(xiàn)概率較大的點(diǎn)組成一個(gè)穩(wěn)定的副邊線圈出現(xiàn)區(qū)域(綠色區(qū)域)。這個(gè)區(qū)域即是需要按照一定路徑進(jìn)行遍歷的有效充電區(qū)域。
1.2.2 搜索路徑
為了節(jié)省成本和時(shí)間,需要按照一定的搜索路徑進(jìn)行搜索,使其可以通過算法快速高效的定位到最佳充電點(diǎn)。圖5是規(guī)定路徑的劃分,項(xiàng)目擬將區(qū)域劃分為4個(gè)區(qū)域,5種可循跡路徑(四種嵌套型扇形路徑,一種半徑分界路徑)。在保證精度的前提下,為了最大限度的減少路徑線,項(xiàng)目將條紋內(nèi)徑控制在3~5cm。原邊線圈的中心將沿著預(yù)定的路徑進(jìn)行運(yùn)動(dòng),并接收實(shí)時(shí)指令更改路徑。
圖5 有效充電區(qū)域循跡路徑
1.2.3 路徑變更
在最佳充電點(diǎn)的搜索過程中,為了搜索過程的準(zhǔn)確快速進(jìn)行,項(xiàng)目組規(guī)定:每次充電請求發(fā)送后,原邊線圈的中心都應(yīng)放置在初始位置,即有效充電區(qū)域的中心。并且最先遍歷半徑分界路徑,當(dāng)找到局部電流最優(yōu)點(diǎn)后,從該點(diǎn)向當(dāng)前路徑的法線方向改換路徑。
1.3 電流信息的采集
沿著上述路徑即可進(jìn)行電流信息的搜索,又由功率式PUI= 可知:在無線傳能的過程中,輸出電壓U不變的情況下,輸出功率的大小取決于電流的大小。因此為了檢測到原邊線圈的電流變化,項(xiàng)目組擬采用整套電路包括:發(fā)送-接收電路、整流電路、抽樣電路、穩(wěn)壓電路等。用來實(shí)現(xiàn)原邊線圈輸出恒定電壓時(shí),可以檢測并采樣出原邊線圈的電流大小。
如圖6所示,利用穩(wěn)壓電路輸出電壓穩(wěn)定的電能,利用發(fā)送-接收電路表示電能傳輸過程,利用整流電路將發(fā)出的交流電轉(zhuǎn)換為直流電,并利用抽樣電路將整流之后的電流值采樣,即可得到一系列電流的實(shí)時(shí)數(shù)據(jù)。
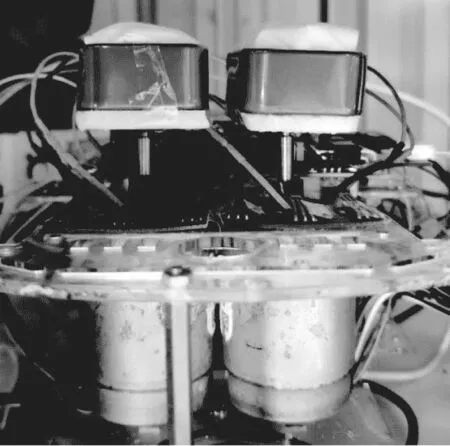
圖6 自動(dòng)黑板擦試驗(yàn)樣機(jī)
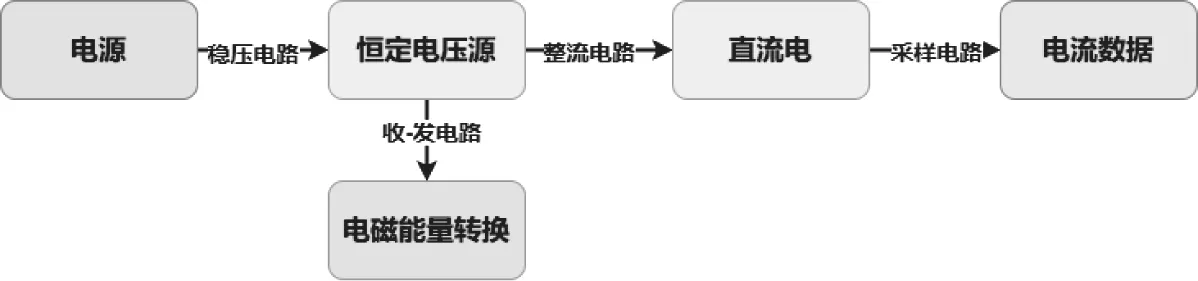
圖6 電流數(shù)據(jù)采樣流程
1.4 確定全局最優(yōu)點(diǎn)
利用驅(qū)動(dòng)裝置驅(qū)動(dòng)原邊線圈按照規(guī)定路徑進(jìn)行搜索,并將檢測到的實(shí)時(shí)電流數(shù)據(jù)采集到單片機(jī)。
將傳回的電壓/功率數(shù)據(jù)尋找每一輪迭代的最優(yōu)點(diǎn)。由于采樣數(shù)據(jù)是隨著原邊線圈的動(dòng)作逐漸更新的,因此迭代過程的運(yùn)行與結(jié)束取決于我們制定的接收概率:

其中n表示采樣電路采到的數(shù)據(jù)標(biāo)記,E(n)表示第n個(gè)數(shù)據(jù)的數(shù)值。為了提高算法的速度,我們可以將概率設(shè)置的盡量大然而,如果接收概率過小又會(huì)造成最優(yōu)解局部化。經(jīng)過對系統(tǒng)的考量及經(jīng)驗(yàn),我們選擇將每一輪閉合路徑的接受概率設(shè)置為P=0.85~0.9,迭代次數(shù)設(shè)置為100次。
利用上述模型計(jì)算原邊線圈在單條路徑上運(yùn)動(dòng)時(shí)的電流數(shù)據(jù)局部最優(yōu)點(diǎn),計(jì)算得到單條路徑的最優(yōu)位置后,從該位置更換另一條路徑,繼續(xù)搜索電流數(shù)據(jù)最優(yōu)點(diǎn)。以此類推,逐步迭代,直到此點(diǎn)被接受為全局最優(yōu)點(diǎn)即最佳充電點(diǎn)。
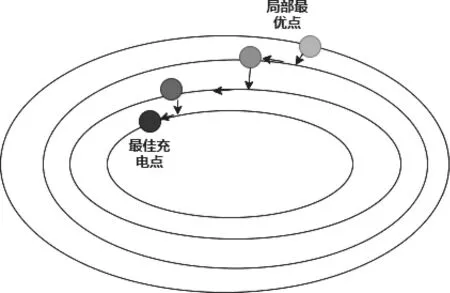
圖7 最佳充電點(diǎn)搜索
2 傳能效率檢測裝置
由于電動(dòng)汽車的無線充電原副線圈之間有一定的距離,因此在暴露的環(huán)境中可能會(huì)有電磁干擾以及其他介質(zhì)的阻擋,從而導(dǎo)致無線傳能的效率下降。那么如和衡量充電效果呢?
2.1 電路總模型
如圖8所示,本文設(shè)計(jì)了從電能發(fā)送、中間環(huán)境到電能接收、檢測效率的整套電路。具體包括供電電路、變壓器電路、中間環(huán)境模擬電路、降壓整流電路,差分比較電路等,構(gòu)成了整套監(jiān)測系統(tǒng)。其中,整個(gè)系統(tǒng)采用美國汽車工程師協(xié)會(huì)標(biāo)準(zhǔn)數(shù)據(jù)(SAE J2954)[4]如表1,將數(shù)據(jù)帶入模型進(jìn)行模擬。
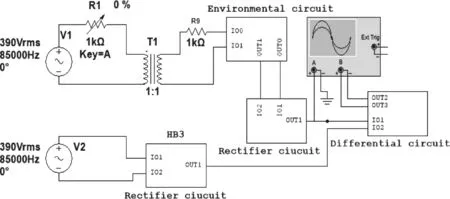
圖8 整套電路

表1 SAE標(biāo)準(zhǔn)數(shù)據(jù)
2.2 環(huán)境電路搭建
為了模擬實(shí)際環(huán)境中的傳能電路,檢測不同的磁阻、磁環(huán)境對傳能效率的影響,本文根據(jù)實(shí)物模型(圖9)得到的數(shù)據(jù)結(jié)果,利用multisim中不同電子器件組合來模擬了這一過程,分析其各項(xiàng)特性。
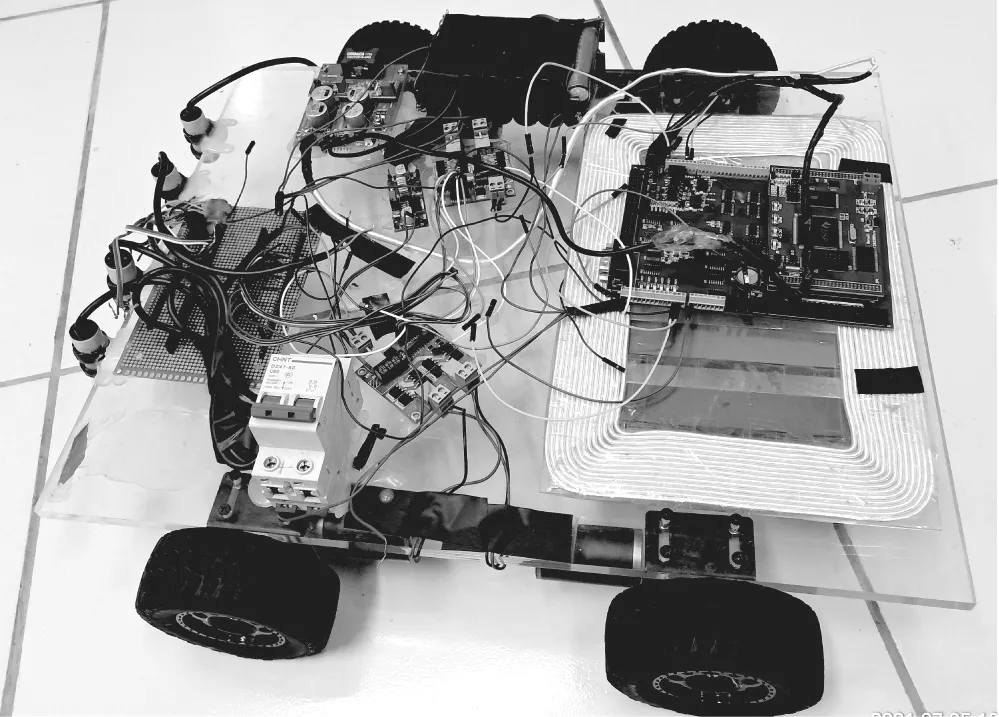
圖9 環(huán)境電路模型
2.3 性能測試
對上述整個(gè)系統(tǒng)進(jìn)行仿真,并結(jié)合電磁理論分析此套裝置的相關(guān)性能。
不同磁阻檢測:調(diào)節(jié)環(huán)境模塊中的可調(diào)電阻,調(diào)節(jié)范圍為0%~100%,平均步長為5%。將得到的數(shù)據(jù)進(jìn)行處理,并擬合出電阻-效率特性如圖10所示。
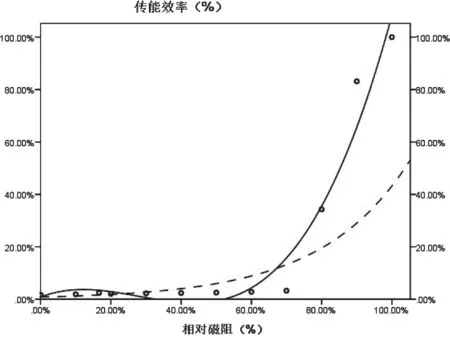
圖10 電阻-效率特性曲線
我們得到模型中電阻與傳能效率關(guān)系式為:

根據(jù)磁阻Rm與磁導(dǎo)率μ、電阻R與電導(dǎo)率ρ的關(guān)系為:

結(jié)合文獻(xiàn)[5]得,磁阻與電阻的關(guān)系為:

其中l(wèi)為電阻或磁阻的長度,N為線圈匝數(shù),U為線圈施加電壓,φ為線圈感應(yīng)出的磁通量。
又由電壓(有效值)與磁通量的關(guān)系:

得到磁阻表達(dá)式:

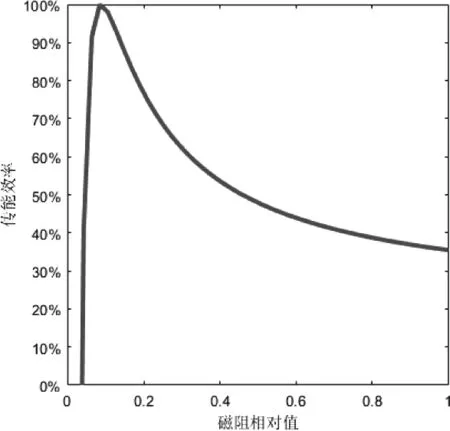
圖11 磁阻-效率特性曲線
從曲線圖中可以看出:傳輸效率隨相對磁阻的增加而迅速增大,達(dá)到峰值后又逐漸下降,趨近于恒定值。當(dāng)效率達(dá)到最大值,即時(shí),可以得到磁阻相對值為0.084時(shí),傳輸效率最大。
因此我們得出結(jié)論,在磁傳輸過程中,磁阻與傳能效率呈非線性關(guān)系,且隨著磁阻的增大,其改變對效率的影響逐漸減小;并且我們發(fā)現(xiàn),存在一個(gè)使傳輸效率最大的磁阻值,若經(jīng)過此點(diǎn)后繼續(xù)減小磁阻時(shí),會(huì)使傳能效率急劇減小。這與無線傳能中距離與傳能效率的非正比關(guān)系是一致的[6],也進(jìn)一步驗(yàn)證了本文模型的正確性。
3 效果分析
為了驗(yàn)證整套裝置的效果及方案的可行性,我們在multisim和matlab進(jìn)行模擬,得到如下結(jié)果。
3.1 數(shù)據(jù)異常值評估
運(yùn)行整個(gè)過程,并對接收到的數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析,得到圖12效果。
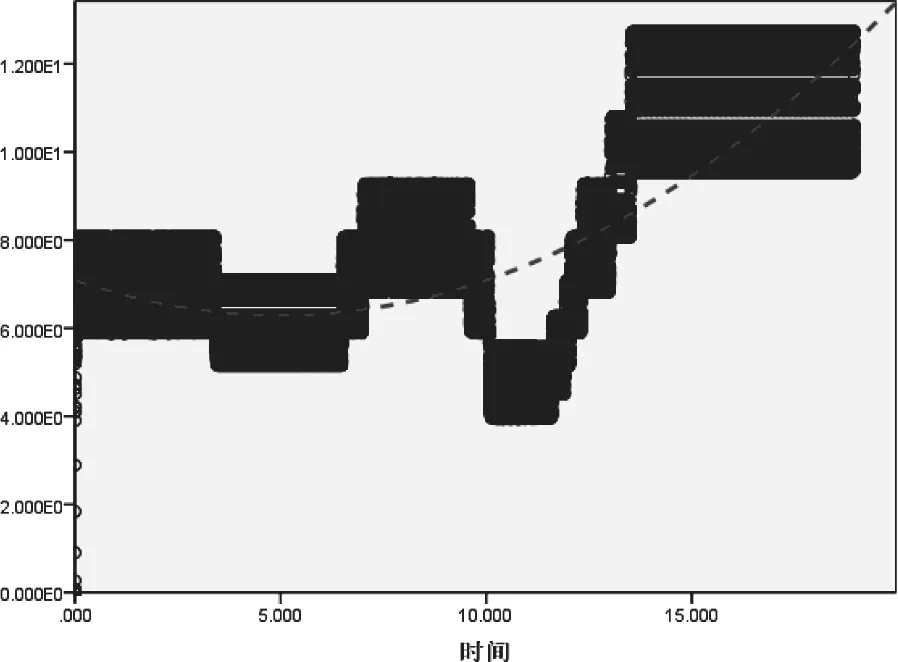
圖12 采樣數(shù)據(jù)效果
我們發(fā)現(xiàn),對于采樣得到的數(shù)據(jù)并非基于時(shí)間的單值數(shù)據(jù),因此我們需要對數(shù)據(jù)值進(jìn)行去值擬合處理,得到處理效果見表2。

表2 去值效果分析
可以看出,去值擬合可以對原數(shù)據(jù)進(jìn)行94.2%的表示,數(shù)值損失為0.5%,效果較為理想。
3.2 延遲分析
對整個(gè)過程的時(shí)延進(jìn)行估計(jì),總延時(shí)為:

可知,總的時(shí)間延遲包括數(shù)據(jù)在傳輸過程中的傳輸延遲時(shí)間ts(transform time)、數(shù)據(jù)處理時(shí)間tc(calculate time)、裝置中由于電容電感和電子器件的充放電延遲時(shí)間td(device delay time)以及像裝置老化等其他因素導(dǎo)致的延遲tadd。其中ts,tc,tadd具有一定的不可控性,且更多決定于硬件設(shè)施的性能,在此不予討論。對于設(shè)計(jì)的檢測裝置的延遲,可以通過實(shí)驗(yàn)檢測出其大致的延遲時(shí)間td。
調(diào)節(jié)檢測裝置中的環(huán)境模塊,在其中增加一個(gè)極性電容并聯(lián)沖擊環(huán)節(jié),時(shí)間段為0.005s~0.007s。運(yùn)行整套裝置,得到檢測裝置的時(shí)延情況如圖13所示。
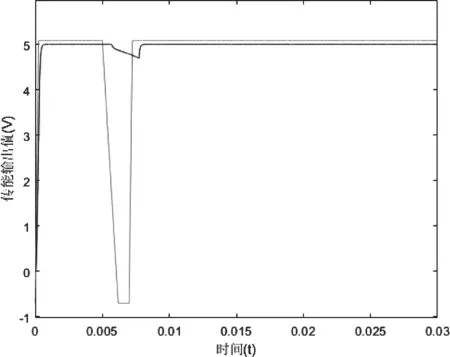
圖13 檢測裝置時(shí)延分析
從圖中我們可以看到:對于時(shí)長為0.002s的沖擊,檢測裝置的延遲時(shí)間可以保持在3e-3以內(nèi),這在整個(gè)電能檢測的過程中是一個(gè)較為理想的結(jié)果,但如果考慮整個(gè)系統(tǒng)的協(xié)調(diào)性與實(shí)時(shí)性,尤其是利用算法尋找最佳充電點(diǎn)時(shí),相比于微機(jī)計(jì)算速度(ms),此裝置的時(shí)延也確實(shí)會(huì)帶來不小的誤差,因此可以通過改換不同型號的電子器件來改善電路中的時(shí)間常數(shù)τ,使其滿足整套裝置的運(yùn)行要求。
4 結(jié)論
本文首先介紹了針對于電動(dòng)汽車無線充電過程中,搜尋最優(yōu)效率并對接的方案。并從電機(jī)控制、算法實(shí)現(xiàn)、電能數(shù)據(jù)處理等方面對方法進(jìn)行了詳細(xì)介紹。
隨后,本文利用multisim建立了用于實(shí)時(shí)監(jiān)測無線傳能效果的電路模型,將其聯(lián)結(jié)構(gòu)成整個(gè)系統(tǒng)。利用環(huán)境模塊測試裝置的性能,得到了磁阻與無線傳能效率的特性曲線,其特性與實(shí)際一致,驗(yàn)證了裝置的正確性。
最后,本文對整個(gè)方案構(gòu)成的系統(tǒng)進(jìn)行了模擬測試,并進(jìn)行了檢測值分析與延遲分析,對本文的方案進(jìn)行了客觀的評估。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
甘肅教育(2020年14期)2020-09-11 07:57:42
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
時(shí)代英語·高二(2015年1期)2015-03-16 00:08:11