基于變中心最大熵CQKF 的WiFi/IMU 組合定位方法
2021-10-13 08:45:36張麗杰郝利軍李志宇
導航定位學報 2021年5期
張麗杰,郝利軍,李志宇
(1. 內蒙古工業大學 電力學院,呼和浩特 010051;2. 內蒙古機電控制重點實驗室,呼和浩特 010051)
0 引言
隨著人們對個人位置的關注,個人導航定位的需求逐漸從室外擴展到室內。基于無線保真(wireless fidelity, WiFi)網絡的無線定位具有成本低、可實現性強和速度快等優點,但由于WiFi信號不穩定,其無法滿足高精度定位需求。以慣性測量單元(inertial measurement unit, IMU)為傳感器的慣性導航是一種不依賴于外界信息、也不向外部輻射能量的自助式導航方式,具有短期動態性能好、數據更新率高、可全天侯和全時間工作等優點。利用WiFi 和IMU 在定位中的互補性,可構成精度更高的組合定位系統,近年來基于WiFi 和IMU 的組合定位技術,已成為導航領域的研究熱點之一[1]。
濾波估計算法是影響多傳感器組合定位精度的關鍵因素,已有研究人員將卡爾曼濾波(Kalman filter, KF)[2]、容積卡爾曼濾波(cubature Kalman filter, CKF)[3]用于室內組合定位,CKF 具有比KF更高的濾波精度[4]。針對CKF 在非高斯條件下性能不穩定的問題,文獻[5]將最大熵(maximum correntropy, MC)準則引入CKF 中,對量測噪聲進行實時估計,濾波精度比CKF 更高,但由于MC準則以零中心高斯核函數為基礎,對于非高斯噪聲且相關熵非零均值的情況,該準則的穩態性下降。為此,文獻[6]提出了變中心(variable center,VC)最大熵準則,將其用于自適應濾波算法中,以提高濾波算法的性能。另外,文獻[7]將高斯-拉蓋爾(Gauss-Laguerre)準則引入CKF 中,提出容積積分卡爾曼濾波(cubature quadrature Kalman filter, CQKF),解決了CKF 在求取徑向積分時只保留一階項導致濾波精度不高的問題。
針對行人室內定位環境復雜、噪聲干擾不確定性強的問題,本文提出一種基于變中心最大熵CQKF ( variable center maximum correntropy cubature quadrature Kalman filter, VCMCCQKF)的WiFi/IMU 組合定位方法,將變中心最大熵準則引入CQKF 中,采用VCMCCQKF 先對WiFi 定位結果進行濾波,再對WiFi/IMU 組合系統數據進行融合,以提高定位精度,并用實驗驗證算法的有效性。
1 WiFi/IMU 組合定位方案設計
本文采用的WiFi/IMU 組合定位系統方案如圖1所示。圖1 中:AP(access point)為接入點;RP(reference point)為參考點;K-means 為K-均值;WKNN(weighted k-nearest neighbor algorithm)為加權K最鄰近算法。定位的精度,通常需要對其定位結果進行濾波。
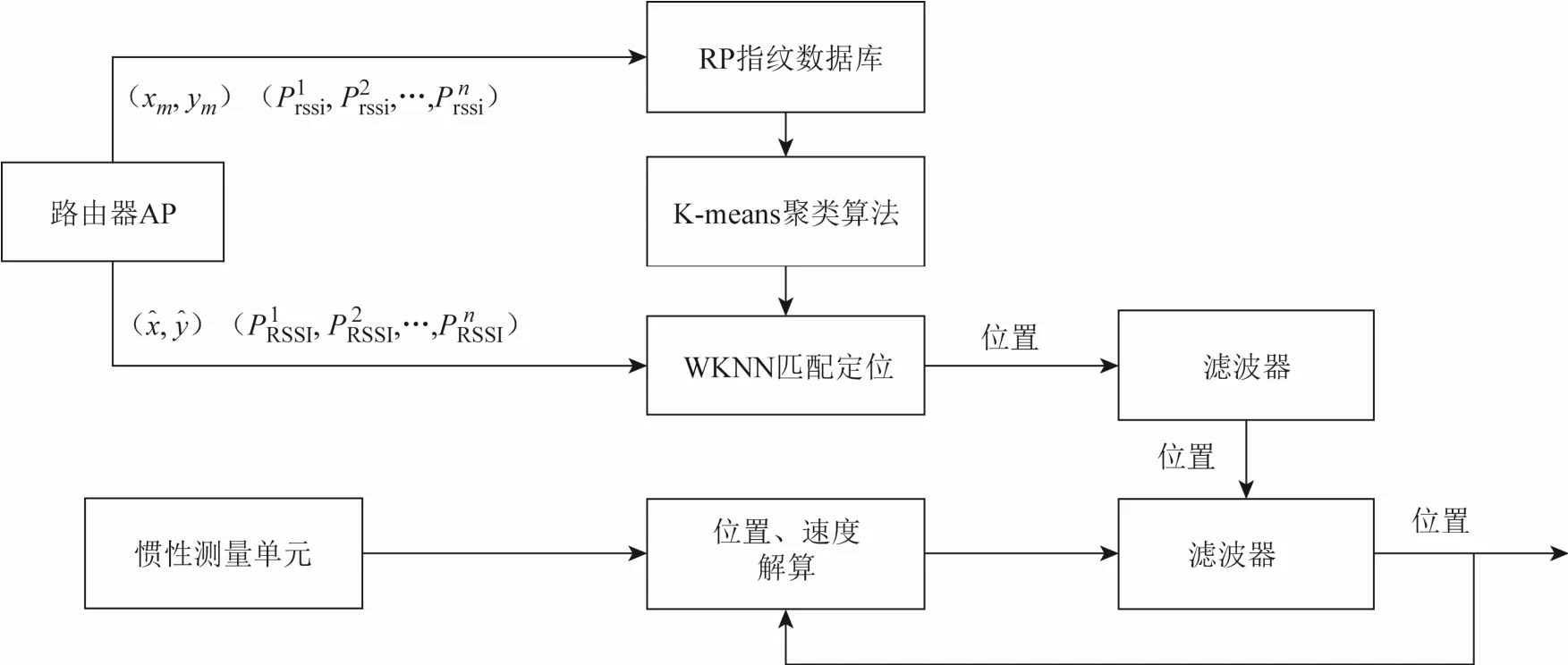
圖1 WiFi/IMU 組合定位系統原理框圖
在慣性定位子系統中,根據IMU 測量的載體加速度和旋轉角速度解算得到位置和速度。
在WiFi/IMU 組合定位系統中,采用濾波器對WiFi 定位結果和慣性定位結果進行融合,將慣性定位系統的位置和速度作為組合系統的狀態信息,將WiFi 定位結果作為量測信息,通過估計位置對慣性定位結果進行反饋矯正。
2 系統數學模型
對于圖1 所示WiFi/IMU 組合定位系統,系統 狀 態 為 載 體 的 位 置 和 速 度 , 即Xk=[x(k)y(k)vx(k)vy(k)]T,系統量測來源于
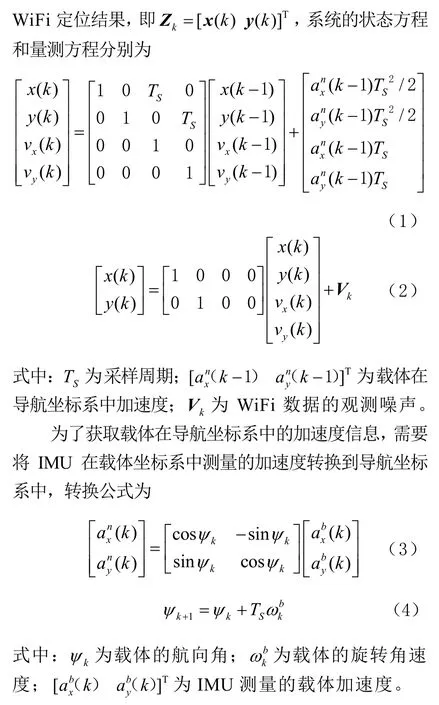
3 變中心最大熵CQKF 濾波算法設計
3.1 變中心最大熵準則
隨機變量X和Y的相關熵表示二者的相似程度,其定義為,
最大熵準則以零中心高斯核函數為基礎,針對實際應用中的噪聲非高斯且相關熵非零均值情況,定義隨機變量X和Y的變中心熵為

式中:e=X-Y;b∈R為相關熵中心位置。
對于相關熵中心不為零的情況,式(7)最大熵準則演變為變中心最大熵準則。
3.2 基于變中心最大熵準則的量測噪聲估計
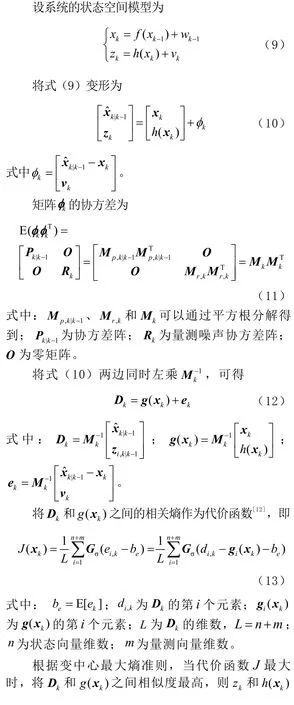
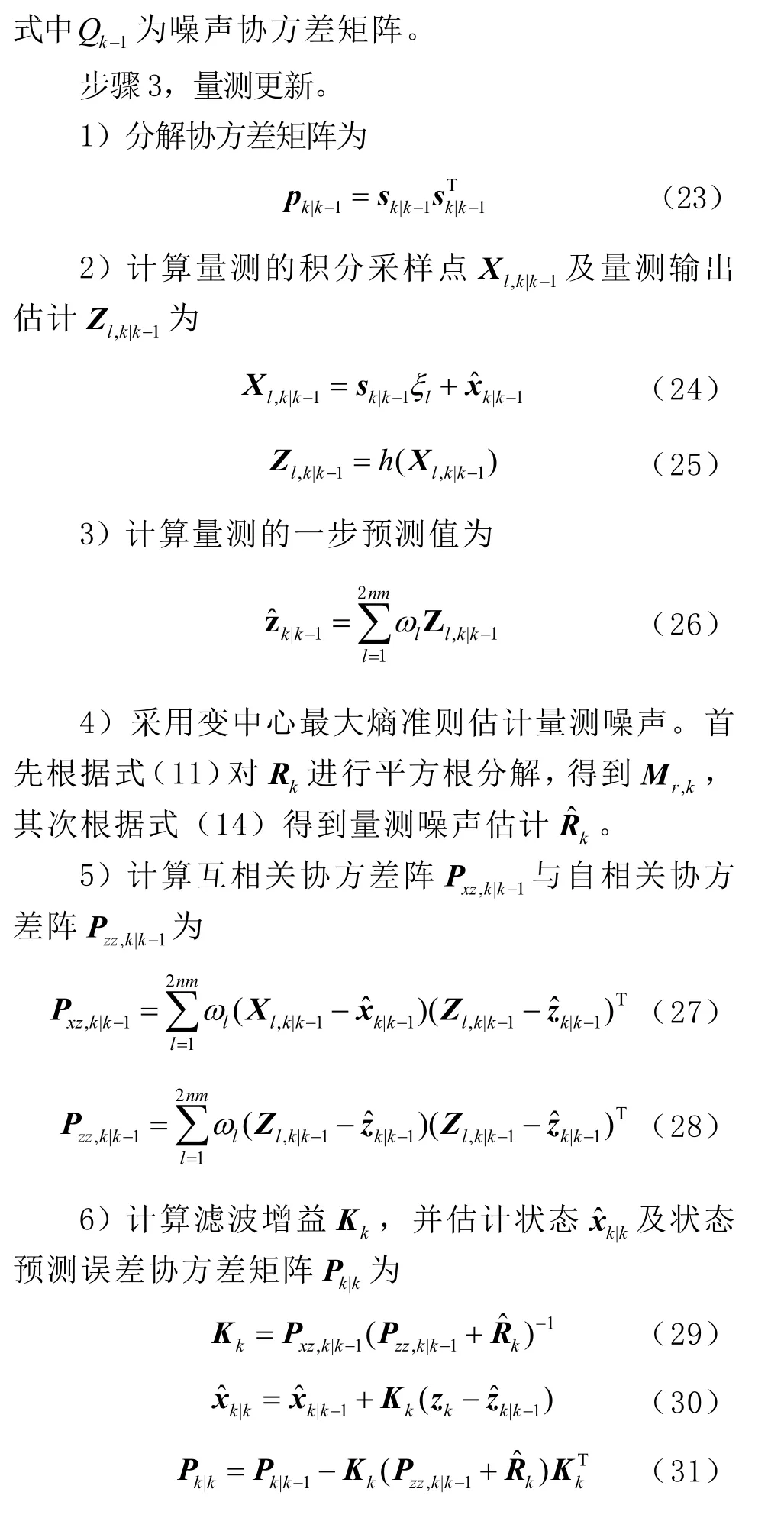
3.3 變中心最大熵CQKF 算法步驟
將基于變中心最大熵準則的量測噪聲估計方法引入CQKF,即可得到變中心最大熵CQKF 濾波算法VCMCCQKF。VCMCCQKF 的具體步驟如下:

4 實驗
本文采用位置均方根誤差(root mean square error,RMSE)評估算法性能,位置均方根誤差的定義為

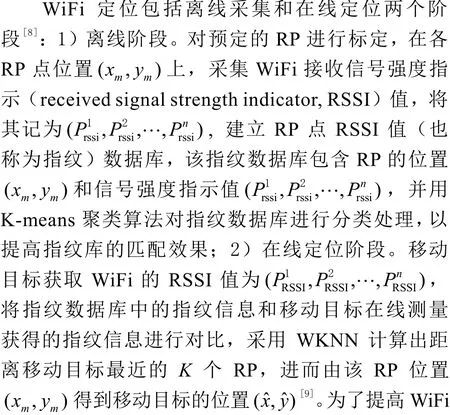
在教學樓一樓部署實驗環境,如圖2 所示,共部署3 個WiFi 接入點(AP),按0.6 m 間距預定RP,建立的WiFi 指紋數據庫中共有312 組指紋信息。在各RP 處分別對3 個AP 采集RSSI 值,且每個RP 的 RSSI 值為10 次采集RSSI 的均值,行人攜帶手機由東門(起點)行至北門(終點)處,其間通過手機內置傳感器采集WiFi 信號的RSSI值和IMU 數據,采集的數據通過手機上傳并保存至計算機中,為了驗證本文設計的組合定位方案和數據融合算法的有效性,在矩陣實驗室(matrix laboratory, MATLAB)中編寫定位算法程序,進行了以下2 個實驗。
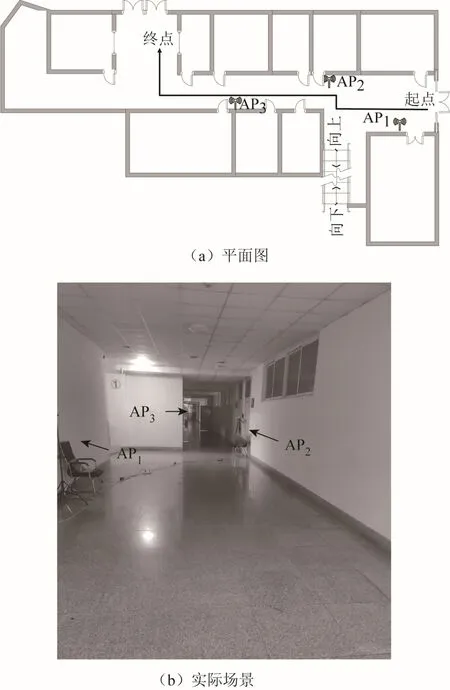
圖2 實驗環境部署
1)單獨系統定位和組合定位對比實驗。分別采用WiFi 定位、慣性定位和本文提出的WiFi/IMU組合定位方法獲得行人定位結果,定位結果如圖3所示,定位平均誤差如表1 所示。
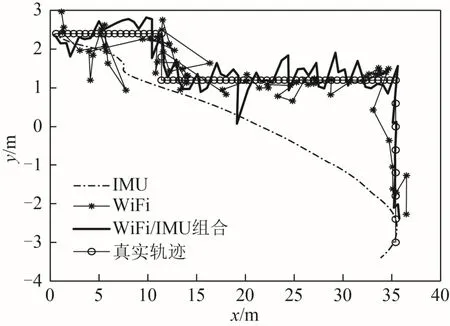
圖3 單獨系統定位和組合定位對比實驗
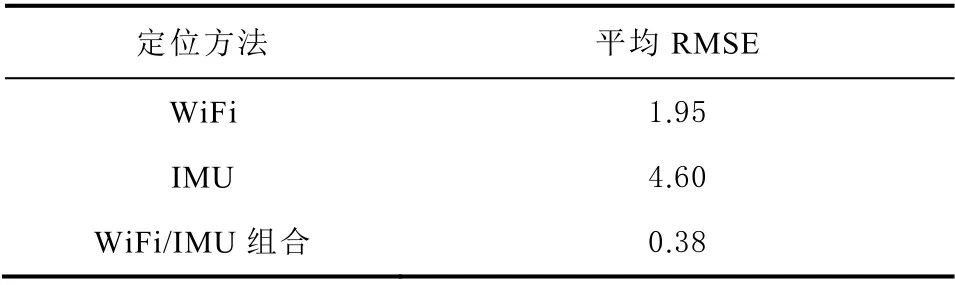
表1 單獨系統定位和組合定位平均誤差 單位:m
由圖3 和表1 可知,WiFi/IMU 組合定位誤差最小,相比WiFi 和IMU 單獨定位,WiFi/IMU 組合定位誤差分別減少了81%和92%。
2)WiFi/IMU 數據融合算法實驗。分別采用CQKF、最大熵CQKF(MCCQKF)和變中心最大熵CQKF(VCMCCQKF)作為WiFi/IMU 組合定位系統的數據融合算法,比較算法的精度、復雜度和收斂性。采用算法迭代一次的時間評價其復雜度,采用算法首次迭代至達到定位平均誤差的時間評價其收斂性,定位誤差如圖4 所示,定位平均誤差、收斂時間和運算時間如表2 所示。
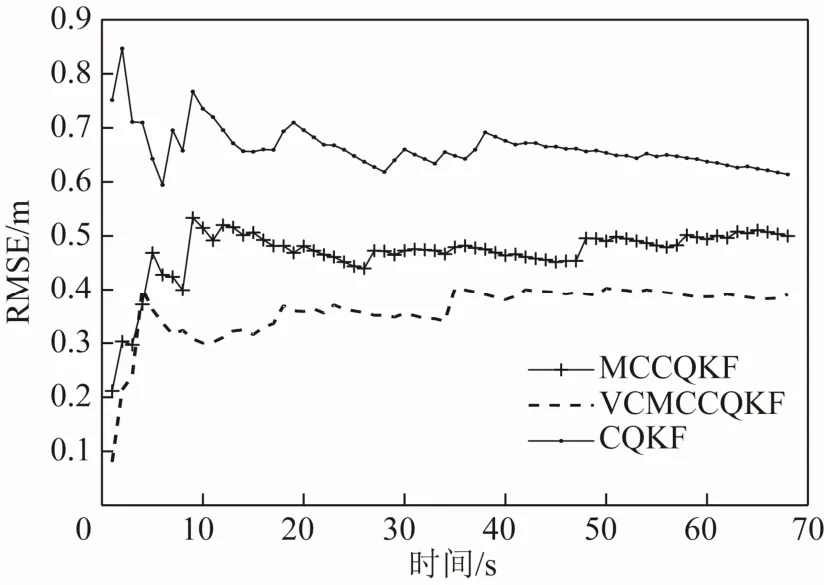
圖4 基于不同數據融合算法的WiFi/IMU 組合定位誤差
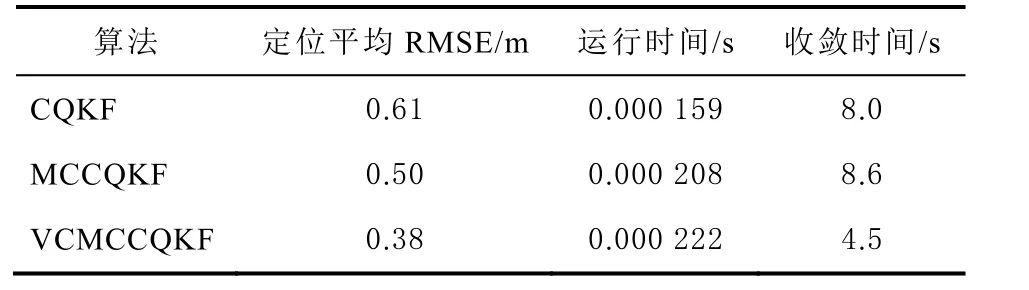
表2 不同數據融合算法的性能比較
由圖4 和表2 可知,VCMCCQKF 算法的定位誤差最小,相比MCCQKF 和CQKF,VCMCCQKF定位誤差分別減少了24%和38%;VCMCCQKF 比MCCQKF 和CQKF 的運算時間僅增加了0.014 和0.063 ms;MCCQKF 的收斂性略低于 CQKF,VCMCCQKF 的收斂性比CQKF 有明顯提高,其收斂速度是CQKF 的1.78 倍。
5 結束語
為了提高移動目標的室內定位精度,本文提出了一種基于變中心最大熵CQKF 的WiFi/IMU 組合定位方法。該方法以WiFi 信號強度和IMU 測量結果作為數據源,采用變中心最大熵CQKF 濾波算法對WiFi 定位結果進行濾波和對WiFi 和IMU數據進行融合。實驗結果表明:提出的變中心最大熵CQKF 比最大熵 CQKF 和CQKF 具有更高的濾波性能,采用基于變中心最大熵 CQKF 的WiFi/IMU 組合定位方法能夠有效提高移動目標的定位精度。另外,相關熵的中心表征了兩個隨機變量的相似程度,將其用于量測噪聲估計問題,則體現量測噪聲的大小,相關熵的中心值變化越大,說明量測噪聲的波動越大,因此可實時估計量測噪聲均值,進而實時調整相關熵中心值,進一步提高算法的自適應性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52