基于增廣P型學(xué)習(xí)觀測器的航天器故障重構(gòu)和自適應(yīng)容錯控制
2021-10-14 02:32:04駱天依李化義孟慶松
南京信息工程大學(xué)學(xué)報 2021年4期
駱天依 李化義 孟慶松
0 引言
姿態(tài)控制系統(tǒng)作為航天器最重要的子系統(tǒng)之一,由于所處空間具有復(fù)雜不確定性,極易發(fā)生故障,導(dǎo)致航天器失去穩(wěn)定性甚至完全失效[1-3].因此,很有必要對航天器發(fā)生的故障及時進(jìn)行診斷和隔離,并設(shè)計出新的容錯控制器保證航天器在軌運行期間的可靠性與安全性.
按照Frank等[4]的觀點,故障診斷方法可以分為三類:基于解析模型的方法、基于信息處理的方法和基于知識的方法.其中,基于解析模型的方法作為傳統(tǒng)的故障診斷方法,經(jīng)過近50年的發(fā)展和完善,至今仍被廣泛應(yīng)用在航天器姿控系統(tǒng)故障重構(gòu)和容錯控制領(lǐng)域.然而隨著航天任務(wù)難度的提升,航天器的結(jié)構(gòu)和功能趨向于復(fù)雜多樣化,構(gòu)成航天器的元器件種類和數(shù)量不斷增加,這也提高了故障診斷方法的復(fù)雜性和容錯控制器的設(shè)計難度.但仍有很多學(xué)者在此領(lǐng)域進(jìn)行著不斷的探索和突破.
針對航天器執(zhí)行機(jī)構(gòu)故障,Li等[5]設(shè)計了擴(kuò)張狀態(tài)觀測器對航天器姿控系統(tǒng)模型參數(shù)、外在干擾和執(zhí)行器的飽和輸出進(jìn)行估計和補(bǔ)償,并利用逆最優(yōu)控制李雅普諾夫函數(shù)方法保證閉環(huán)系統(tǒng)的漸近穩(wěn)定性;Zhang等[6]針對剛性航天器執(zhí)行機(jī)構(gòu)失效故障和飽和約束,設(shè)計了一種滑模故障估計觀測器,并在此基礎(chǔ)上利用滑模控制思想設(shè)計了相應(yīng)的容錯控制器;Wang等[7]首先利用自適應(yīng)方法估計執(zhí)行器故障模型中的未知參數(shù),在此基礎(chǔ)上設(shè)計出一種自適應(yīng)未知輸入觀測器對故障進(jìn)行檢測和隔離.
針對航天器傳感器故障,Wang 等[8]基于線性矩陣不等式技術(shù)設(shè)計出兩組具有良好魯棒性的H∞最優(yōu)觀測器,并設(shè)計出滿足一定姿態(tài)誤差精度的PD控制器(Proportional-Derivative controller)保障航天器在陀螺和傳感器故障同時發(fā)生情況下的安全穩(wěn)定運行能力;韓冰[9]對基于擴(kuò)張狀態(tài)觀測器的方法進(jìn)行了改進(jìn),并利用動態(tài)輸出反饋的方法,提高了故障系統(tǒng)的控制性能;江耿豐等[10]對常用的衛(wèi)星測量部件光學(xué)敏感器和慣性敏感器分別設(shè)計了隔離觀測器和Kalman濾波器,通過比較兩個觀測器的輸出殘差,達(dá)到故障診斷和隔離的目的.
基于上述研究,本文提出了一種基于增廣P型迭代學(xué)習(xí)觀測器的航天器傳感器故障重構(gòu)方法,并利用自適應(yīng)積分滑模的思想設(shè)計新的控制器,解決了對航天器姿控系統(tǒng)故障容錯控制問題.最后,通過航天器姿控系統(tǒng)仿真實例驗證了本文所設(shè)計觀測器和控制器的有效性.
1 問題描述
1.1 航天器姿控系統(tǒng)模型
考慮如下三軸穩(wěn)定剛體衛(wèi)星的姿態(tài)運動學(xué)與動力學(xué)模型:
(1)
(2)

定義

(3)
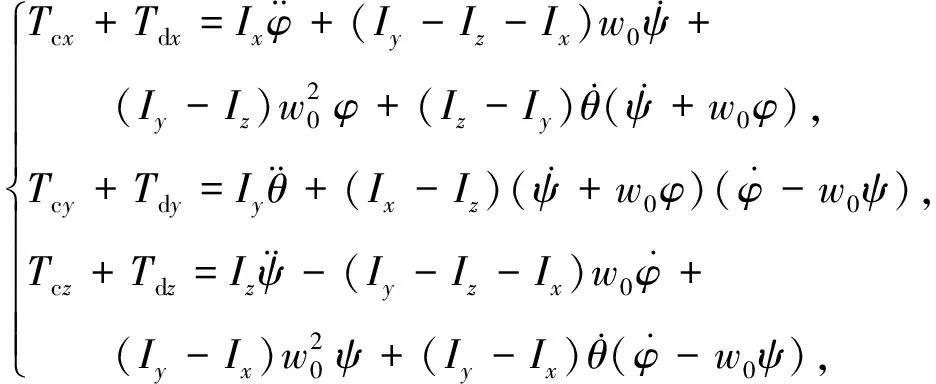
忽略二階小量對系統(tǒng)模型的影響,動力學(xué)模型可以轉(zhuǎn)換成如下微分方程的形式:

(4)
其中參數(shù)矩陣α1和α2表示如下:
令

(5)
能夠得到如下形式的航天器姿控系統(tǒng)狀態(tài)空間模型:

(6)
其中u(t)=Tc表示控制輸入,d(t)=Td表示干擾輸入.
1.2 問題描述
現(xiàn)考慮如下含有不確定干擾輸入的傳感器故障模型:
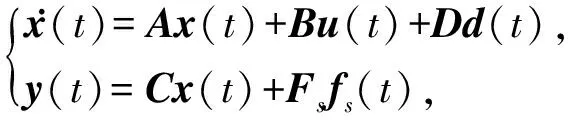
(7)
其中x(t)∈Rn,u(t)∈Rm,y(t)∈Rr分別表示系統(tǒng)狀態(tài)向量、輸入向量和輸出向量,fs(t)∈Rq和d(t)∈Rr0分別表示航天器陀螺儀故障和受到的未知干擾,A,B,C,D均為適當(dāng)維數(shù)的系數(shù)矩陣,A∈Rn×n,B∈Rn×m,C∈Rr×n,D∈Rn×r0,且滿足r0≤r.
對于式(7)所示的傳感器故障,為了抑制故障輸出對系統(tǒng)可靠性的干擾,可以設(shè)計如下形式的輸出濾波器:

(8)
其中系數(shù)矩陣Az∈Rr×r是一個穩(wěn)定矩陣,所有特征值均具有負(fù)實部.

(9)
其中
本文的目的之一就是針對傳感器故障增廣系統(tǒng)(9)設(shè)計增廣P型學(xué)習(xí)觀測器,使得傳感器故障能夠?qū)崿F(xiàn)精確重構(gòu).
同時,為了改善故障系統(tǒng)的性能指標(biāo),減輕陀螺儀故障對航天器姿控系統(tǒng)的不利影響,本文在實現(xiàn)故障重構(gòu)的基礎(chǔ)上,基于故障模型(7),進(jìn)一步設(shè)計容錯控制器,保證航天器在故障狀態(tài)下的穩(wěn)定運行能力.
2 基于增廣P型學(xué)習(xí)觀測器的故障重構(gòu)
針對傳感器故障增廣系統(tǒng)(9),考慮如下形式的增廣P型學(xué)習(xí)觀測器:
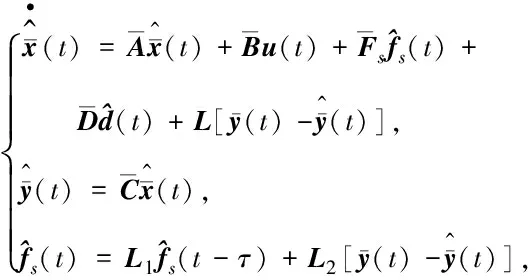
(10)
定義幾種誤差變量如表1所示.
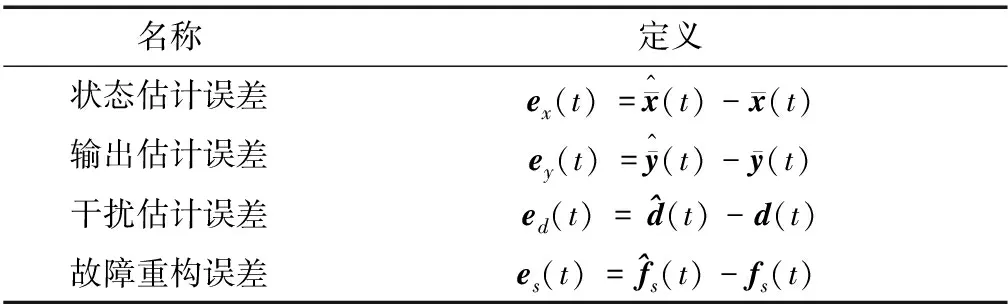
表1 增廣P型觀測器設(shè)計所需誤差變量
考慮增廣系統(tǒng)(9)及其增廣P型學(xué)習(xí)觀測器(10),根據(jù)表1,可得誤差系統(tǒng)動態(tài)方程:

(11)
給出以下假設(shè)輔助增廣P型故障重構(gòu)觀測器的設(shè)計:

(12)
根據(jù)假設(shè)1和表1,能夠得到如下傳感器故障重構(gòu)誤差方程:

(13)
引理1[11]若傳感器故障重構(gòu)誤差如表1所示,則有以下不等式:

(14)
其中η*在定理1中給出.
定理1對于增廣系統(tǒng)(9)及其增廣P型學(xué)習(xí)觀測器(10),若存在下列不等式,則所設(shè)計的增廣P型學(xué)習(xí)觀測器能夠使系統(tǒng)狀態(tài)估計誤差ex(t)、干擾估計誤差ed(t)和傳感器故障重構(gòu)誤差es(t)一致漸近穩(wěn)定.

(15)

(16)

(17)
其中矩陣P*,Q*,參數(shù)δ*,ε*,η*,μ*的定義在證明過程中給出.
證明構(gòu)造Lyapunov函數(shù)

(18)
其中P*∈Rn,Q*∈Rm為正定的實對稱矩陣.
將式(18)對時間t求導(dǎo),得到:

(19)
引理2[12]設(shè)x,y是具有適當(dāng)維數(shù)的實向量,A,B(t)是具有適當(dāng)維數(shù)的實矩陣,‖B(t)‖≤r,存在任意正數(shù)ε,有

(20)
根據(jù)引理2,有:
(21)
(22)
將式(21)和式(22)代入到式(19)中,并借助引理1,得到:

(23)
其中
η*=(1+σ*)λmax(Q*),
σ*≥0.
將式(13)代入式(23),并化簡得到:

(24)
對于式(24),如果定理1中的式(15)成立,則有:

(25)

(26)
(27)
將式(25)—(27)代入到式(24)中,得到:
(28)
根據(jù)引理2,有:

(29)
將式(29)代入到式(28)中,有以下不等式成立:

(30)
根據(jù)定理1中式(16)和式(17)可知:

(31)

(32)
所以有:

(33)
其中
將式(33)進(jìn)一步簡化,得到:

(34)
其中
根據(jù)式(34)可知,當(dāng)不等式滿足

(35)
能夠得到:
(36)
根據(jù)Lyapunov穩(wěn)定性理論,系統(tǒng)狀態(tài)估計誤差ex(t),干擾估計誤差ed(t)和傳感器故障重構(gòu)誤差ed(t)一致漸近穩(wěn)定.定理證畢.
由于定理1求解較為復(fù)雜,為計算定理1中的式(15)—(17),給出以下引理:
引理3[13]設(shè)
(37)
為對稱陣,則Z>0的充要條件是:
(38)
引理4[14]對于給定矩陣A∈Rn,當(dāng)且僅當(dāng)存在對稱矩陣P∈Rn滿足
(39)
時,矩陣A的所有特征值能夠位于圓形穩(wěn)定域D(α,r)內(nèi).其中α和r分別表示該穩(wěn)定圓的圓心和半徑.
利用引理3和引理4,將式(15)—(17)轉(zhuǎn)換為線性矩陣不等式形式:
(40)
(41)
(42)
其中α和r分別表示該穩(wěn)定圓的圓心和半徑.
至此,增廣P型學(xué)習(xí)觀測器設(shè)計完成.
3 基于自適應(yīng)積分滑模的主動容錯控制
令
(43)

定義如下形式的積分滑模面:

(44)
其中矩陣K*=(CB)+∈R3×6,yc(t0)表示系統(tǒng)初始時刻的實際輸出.采用這種積分滑模面可以使系統(tǒng)快速到達(dá)滑模面,提高系統(tǒng)的魯棒性能.
對積分滑模面(44)求導(dǎo),得到:

(45)
ueq(t)=-B+(A+I)x(t)-B+Dd(t)-

(46)

將等效控制律(46)代入到系統(tǒng)(7)中,得到如下形式的積分滑模狀態(tài)方程:
(47)
其中
定理2對于傳感器故障系統(tǒng)(7),設(shè)計形如式(48)所示的容錯控制律,能夠保證系統(tǒng)的漸近穩(wěn)定性.
u(t)=unl(t)+ul(t),
(48)
其中
其中λ*是選取的正常數(shù).
被估計的未知參數(shù)ρ表達(dá)式為
(‖K*NFs‖+‖K*Fs‖)‖es(t)‖,
(49)
其自適應(yīng)律為
(50)
為求解定理2中的輸出反饋增益矩陣N,給出以下輔助引理.
引理5[15]對于形如式(51)的線性系統(tǒng),若存在正定對稱矩陣P使得式(52)成立,則線性系統(tǒng)(51)漸近穩(wěn)定.
(51)
(52)
其中γ為一個任意給定的正常數(shù),I為適當(dāng)維數(shù)的單位陣.
證明首先,對于航天器姿控系統(tǒng)陀螺故障情況下的狀態(tài)空間模型(47),利用引理5能夠得到形如式(53)所示的不等式,使得系統(tǒng)(47)漸近穩(wěn)定.
(53)
其中H=BNC-I.矩陣P和N可以通過LMI工具箱求解得到.
然后,定義形如式(54)的Lyapunov函數(shù),利用Lyapunov穩(wěn)定性理論,證明整個系統(tǒng)在故障重構(gòu)后的漸近穩(wěn)定性.

(54)
sΤ(t){[K*C(A+I)+NC]x(t)+

(55)
假設(shè)系統(tǒng)受到的未知噪聲干擾有界,即‖d‖≤d0.進(jìn)一步有:
(‖K*NFs‖+‖K*Fs‖)‖es(t)‖+
‖B+D‖d0]·‖s(t)‖≤

(56)
其中


(57)
根據(jù)Lyapunov穩(wěn)定性理論可知,所設(shè)計的自適應(yīng)滑模容錯控制器能夠保證航天器姿控系統(tǒng)在陀螺儀故障情況下的漸近穩(wěn)定性.
4 仿真實例
令δ*=ε*=1,Q*=L1=I3,此時有λmax(Q*)=1,η*=1.選取圓形穩(wěn)定域D(0,1),學(xué)習(xí)速率τ=0.001,并選取如下參數(shù)矩陣:
A=é?êêêê03I3-α1-α206Az·I303C1I3é?êêù?úú-Azù?úúúú, B=03B10303é?êêêêù?úúúú,
其中:
Az=diag{-1,-1,-1,-1,-1,-3},
w0=0.001 rad/s,
Ix=12.49 kg·m2,
Iy=13.85 kg·m2,
Iz=15.75 kg·m2,
利用LMI工具箱feasp求解器求解不等式(55)、(56)和(57),得到觀測器增益矩陣L和L2分別為
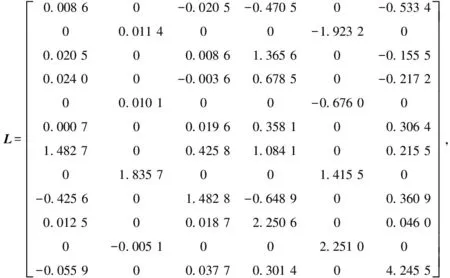
根據(jù)以上給出的仿真參數(shù)和增益矩陣,可以利用Simulink搭建航天器姿控系統(tǒng)增廣P型學(xué)習(xí)觀測器.三種常見故障類型的仿真結(jié)果如圖1—3所示.
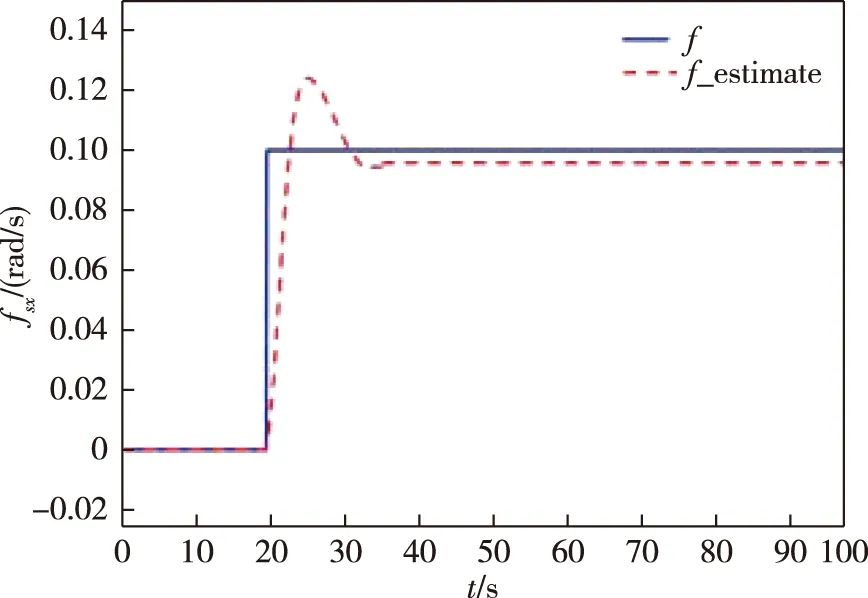
圖1 滾動軸陀螺加性突變故障重構(gòu)Fig.1 Fault reconstruction of rolling axis gyro with additive sudden change fault
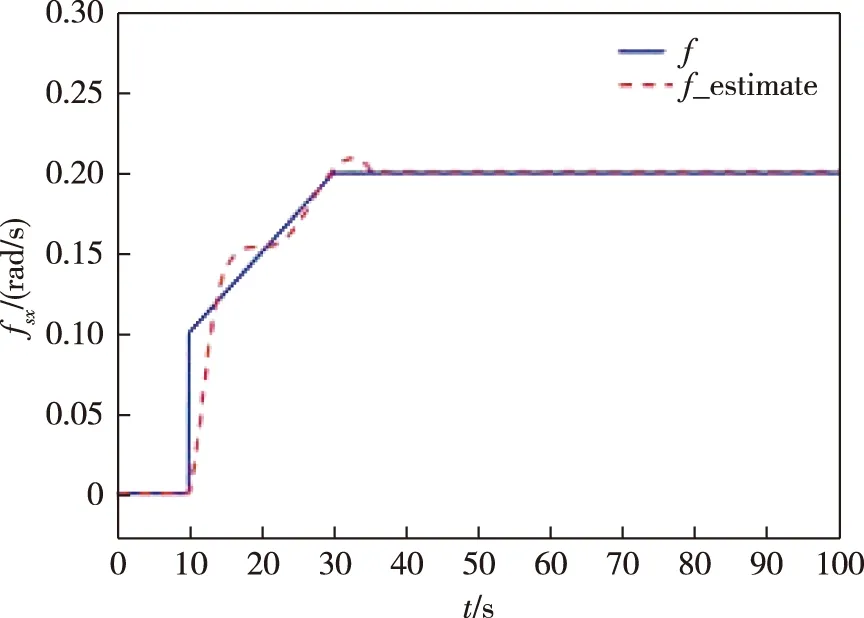
圖2 滾動軸陀螺加性時變故障重構(gòu)Fig.2 Fault reconstruction of rolling axis gyro with additive time-varying fault
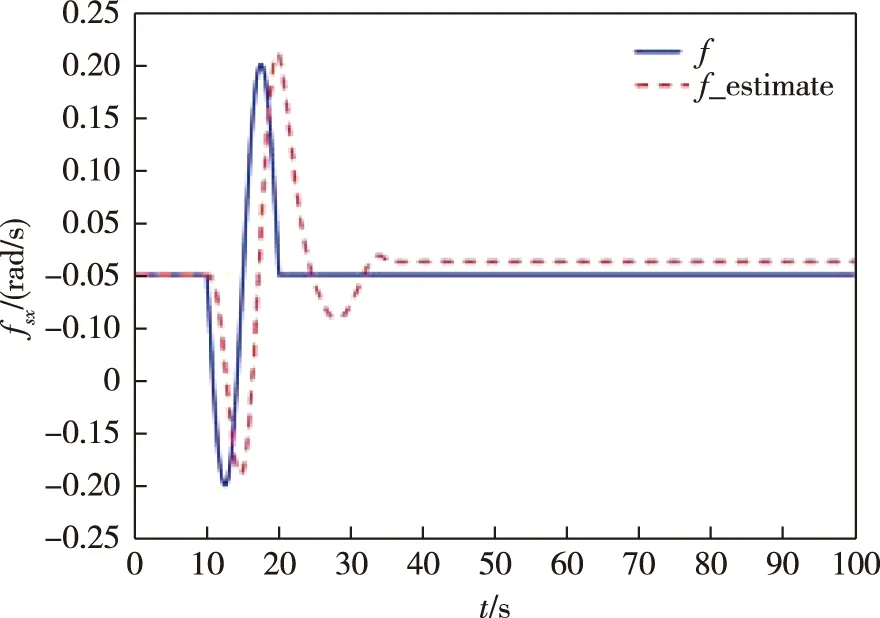
圖3 滾動軸陀螺加性正弦時變故障重構(gòu)Fig.3 Fault reconstruction of rolling axis gyro with additive sinusoidal time-varying fault
1)滾動軸陀螺儀發(fā)生加性突變故障:
2)滾動軸陀螺儀發(fā)生加性時變故障:
3)滾動軸陀螺儀發(fā)生加性正弦時變故障:
從圖1—3可以看出,采用增廣P型學(xué)習(xí)觀測器能夠?qū)σ陨先N類型的傳感器故障實現(xiàn)重構(gòu),驗證了算法的可行性.但可以看出,這種故障估計方法對故障的估計有時不夠精確.在故障突然發(fā)生時,對故障信號的響應(yīng)不夠及時;在故障消失或穩(wěn)定后,仍存在一定的估計誤差.可見該觀測器對緩變故障的重構(gòu)效果較好,對陡變故障的重構(gòu)效果較差.
接下來,利用定理2設(shè)計自適應(yīng)主動容錯控制器提高故障系統(tǒng)的穩(wěn)定性.
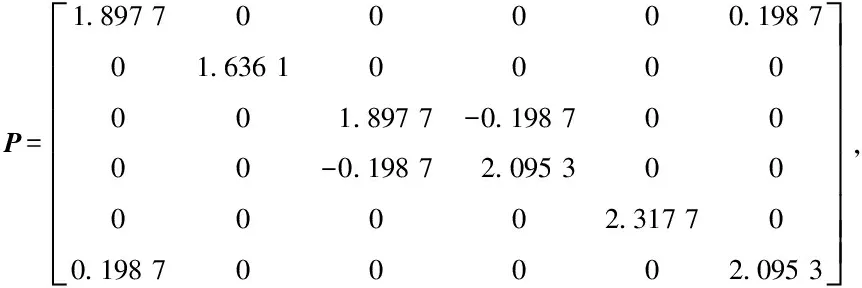
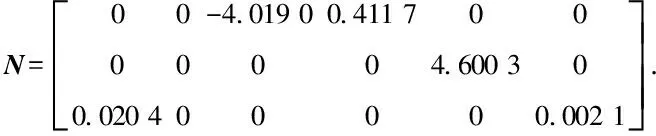
首先,利用Matlab/LMI工具箱feasp求解器求解不等式(50),得到矩陣P和N.然后選取參數(shù)λ*=υ*=1,同時假設(shè)在t0時刻yc(t0)=0.
假設(shè)滾動軸陀螺發(fā)生如下形式的加性正弦時變故障:
采用傳統(tǒng)PD控制器和采用本文所設(shè)計的容錯控制器的仿真結(jié)果如圖4—7所示.
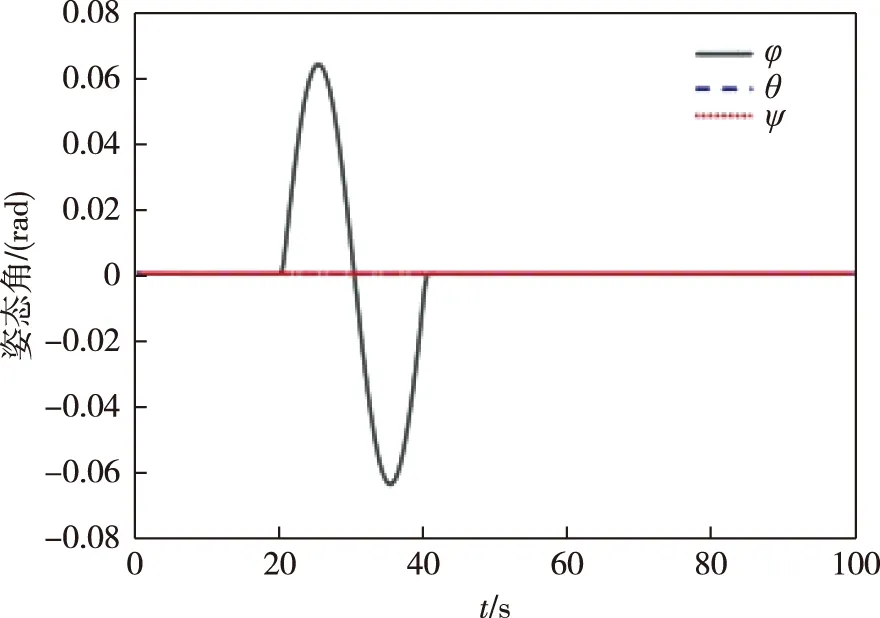
圖4 陀螺加性正弦時變故障情況下傳統(tǒng)PD控制器姿態(tài)角控制效果Fig.4 Attitude angle control effect of traditional PD controller under additive sinusoidal time-varying fault of gyro
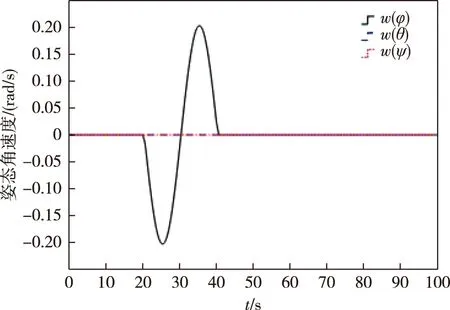
圖5 陀螺加性正弦時變故障情況下傳統(tǒng)PD控制器姿態(tài)角速度控制效果Fig.5 Attitude angular velocity control effect of traditional PD controller under additive sinusoidal time-varying fault of gyro
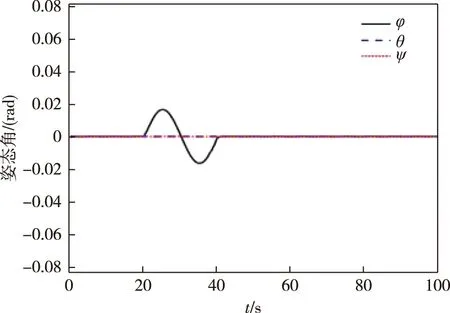
圖6 陀螺加性正弦時變故障情況下自適應(yīng)滑模容錯控制器姿態(tài)角控制效果Fig.6 Attitude angle control effect of adaptive sliding mode controller under additive sinusoidal time-varying fault of gyro
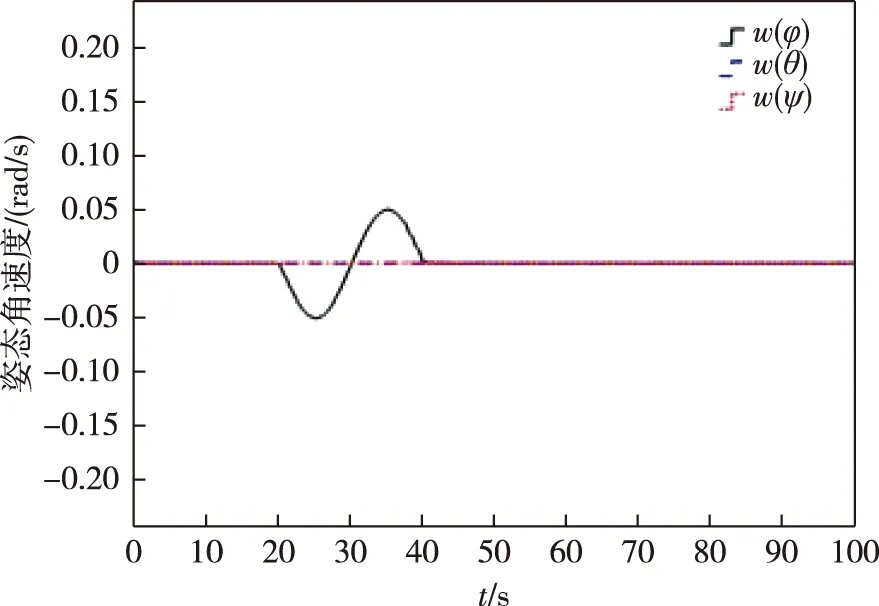
圖7 陀螺加性正弦時變故障情況下自適應(yīng)積分滑模容錯控制器姿態(tài)角速度控制效果Fig.7 Attitude angular velocity control effect of adaptive sliding mode controller under additive sinusoidal time-varying fault of gyro
對比觀察圖4—7可以看出,在采用自適應(yīng)積分滑模容錯控制器后,航天器滾動軸姿態(tài)角和姿態(tài)角速度在相同的故障時間內(nèi)變化幅度減小.其中姿態(tài)角變化范圍大致從±0.065 rad變化到了±0.015 rad,姿態(tài)角速度變化范圍大致從±0.19 rad/s變化到了±0.05 rad/s,系統(tǒng)的穩(wěn)定性有了明顯的改善.這可以說明積分滑模能夠提高系統(tǒng)的魯棒性,同時能夠驗證所設(shè)計自適應(yīng)滑模主動容錯控制器的有效性.
5 結(jié)論
本文提出了一種能夠在線估計航天器姿控系統(tǒng)傳感器故障的增廣P型學(xué)習(xí)觀測器.在將傳感器故障等效考慮成偽執(zhí)行器故障后,將故障值近似看作與前一時刻故障估計值和當(dāng)前時刻輸出估計誤差有關(guān)的兩項,實現(xiàn)了對未知傳感器故障的重構(gòu).在此基礎(chǔ)上,基于自適應(yīng)技術(shù)和滑模理論,設(shè)計自適應(yīng)主動容錯控制器,并利用Lyapunov穩(wěn)定性理論對改進(jìn)后的模型進(jìn)行了穩(wěn)定性分析.仿真結(jié)果可以說明本文所設(shè)計的P型學(xué)習(xí)觀測器和自適應(yīng)容錯控制器均滿足系統(tǒng)設(shè)計要求.
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
