基于改進GWO算法的永磁同步電機滑模MRAS控制
2021-10-14 08:31:42王澤霖胡啟國
汽車安全與節能學報 2021年3期
王澤霖,胡啟國
(重慶交通大學 機電與車輛工程學院,重慶 400074,中國)
永磁同步電機(permanent magnet synchronous motor,PMSM)因具有效率高、功率密度大、轉矩脈動小、體積小等優點,已被廣泛的應用于航空航天、機器人、軌道交通及電動汽車等領域[1-2]。傳統的PMSM通常采用高精度、高分辨率的速度和位置傳感器如旋轉變壓器、光電編碼器等來檢測轉子轉速和位置角信息,但高性能的傳感器不僅提高了電機成本,且易占用空間并給電機的安裝帶來了不便,因此無傳感器控制技術在近些年來受到關注[3]。
無傳感器控制的方法主要分為2種:一種是用來檢測電機在零低速運行時的轉子速度和位置角,如高頻電壓信號注入法、高頻電流信號注入法等;另一種是用來檢測電機在中高速運行時的轉子速度和位置角,如模型參考自適應系統(model reference adaptive system,MRAS)法、擴展Kalman濾波器法、滑模觀測器法等[4-5]。
MRAS是從20世紀50年代后期發展起來的一種自適應控制系統,于 1989年被用于估計異步電機的轉速和PMSM[6]。該方法算法簡單、收斂速度快[7-10]。
滑模MRAS(sliding model MRAS)是在MRAS基礎上引入滑模變結構控制而來,以提高MRAS的魯棒性和抗擾性,但由于較大的系統抖振以及較大的觀測誤差值,又有改進:文獻[11]采用飽和函數來替換傳統滑模MRAS中的開關函數,使系統運行更加平穩;文獻[12]用一種邊界層可變的新型飽和函數替換傳統滑模MRAS中的開關函數,使系統擁有良好的轉速估計效果;文獻[13]采用一種連續切換函數Sigmoid取代了傳統滑模MRAS的開關函數,有效地平滑了控制信號;文獻[14]構造了邊界層可變的正弦飽和函數來替換傳統滑模MRAS的開關函數,抑制了滑模控制產生的抖振。
文獻[11-14]均通過變換開關函數的方式來改善滑模MRAS的性能,但開關函數并不是唯一的影響因素,滑模控制部分所使用的積分滑模面同樣會對系統的收斂速度及精度產生一定影響,進而影響系統的動態特性。
灰狼優化(grey wolf optimizer,GWO)算法是2014年由Mirjalili等提出的一種仿生智能算法,具有計算量小、結構簡單、易編程實現等特點[15-16],近年來,被普遍應用于電力系統控制、飛行器軌跡規劃等領域。
本文引入了非奇異快速終端滑模面[17]與積分滑模面相融合,構成積分型非奇異快速終端滑模面,以使系統的收斂性得到進一步增強;用非線性指數函數代替傳統滑模MRAS中的開關函數,來削弱抖振;利用改進的灰狼優化(GWO)算法,對滑模面參數進行尋優整定。以仿真結果來證實該方案的可行性。
1 PMSM數學模型
與內置式PMSM相比,表貼式PMSM轉動慣量小、電流響應快且其制造成本低。本文以表貼式PMSM為研究對象,采用d軸定子電流id= 0的轉速電流雙閉環矢量控制策略。PMSM數學模型包括定子電壓方程、磁鏈方程、電磁轉矩方程以及轉子運動方程。本文內容僅涉及PMSM的定子電壓,只建立定子電壓方程的數學模型。
忽略電機的磁滯損耗及定子鐵芯飽和等問題,建立PMSM的定子電壓方程如下:
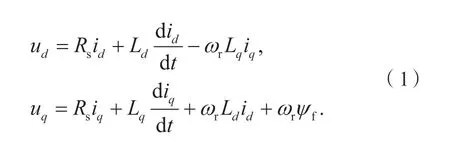
式中:ud、uq與id、iq分別為d-q軸坐標系即兩相旋轉坐標系下的定子電壓與電流;Rs為定子相電阻;Ld、Lq分別為d-q軸坐標系下的電感,且Ld=Lq=Ls;ωr為轉子角速度;ψf為永磁體磁鏈。
2 新型滑模MRAS設計
2.1 MRAS理論
MRAS包含了3部分即參考模型、可調模型與自適應律,其中自適應律的設計最為關鍵,通常采用以超穩定與正性動態系統理論為基礎的設計方法來設計自適應律。
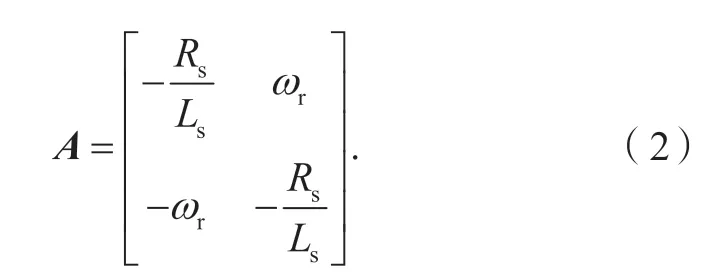
將式(1)整理后可得參考模型為:
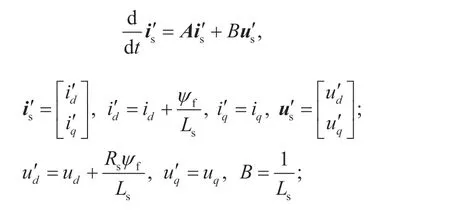
將式(2)以估計值表示,有可調模型為:
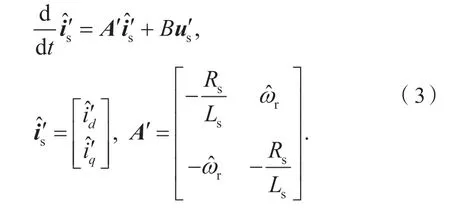
將式(2)與式(3)相減,可得定子電流矢量誤差方程:
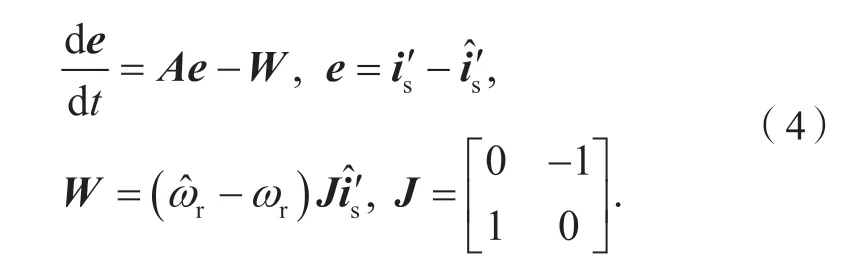
式中:e為定子電流廣義誤差。
由式(4)再結合Popov 超穩定理論,對Popov積分不等式進行逆向求解,即可得到自適應律,最后求得的轉速自適應律為

2.2 滑模MRAS理論
傳統MRAS的轉速自適應律存在著恒定的比例積分(proportional integral,PI)參數,當產生負載擾動等外界干擾時,會顯著影響轉速的觀測精度。為此,相關學者將滑模控制引入MRAS并用其設計自適應律,形成滑模MRAS。滑模控制是利用系統的誤差值來設計控制機構,且系統狀態參數最終均會穩定在滑模面上,因而具有一定的魯棒性。
滑模MRAS自適應律主要包含滑模面的設計與轉速觀測器的設計。
選擇將MRAS的轉速自適應律即式(5)作為滑模面s:

設計轉速觀測器為

式中:λ為觀測器增益,且λ>0;sgn為開關函數。
2.3 滑模MRAS改進
傳統積分滑模面會使系統產生較高的超調量以及較長的調節時間,會降低系統的收斂性能;因而在此引入非奇異快速終端滑模面,該滑模面具有軌跡跟蹤速度快、收斂精度高等特點,其表達式如下:
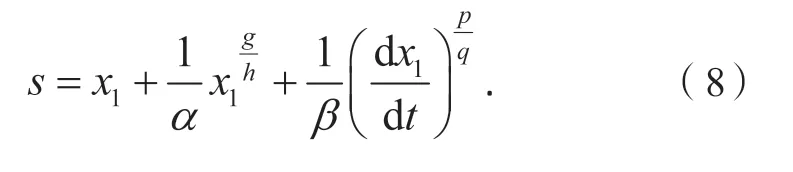
式中:x1為系統狀態變量;α、β∈R+;p、q、g、h∈N,且1<p/q<2,g/h>p/q。
現將非奇異快速終端滑模面(即式(8))與傳統積分滑模面(即式(6))相結合,構成積分型非奇異快速終端滑模面,其設計如下:

式中:a,b,c∈R+。
式(9)中所設計的滑模面同時融入了積分模塊與非奇異快速終端模塊,既保留了原積分滑模面的強魯棒性又納入了非奇異快速終端滑模面的快速收斂特性。
為改善系統抖振現象,得到良好的轉速觀測值,將式(7)中的開關函數替換為一種非線性指數函數,再結合式(9),構成新的轉速觀測器如下:
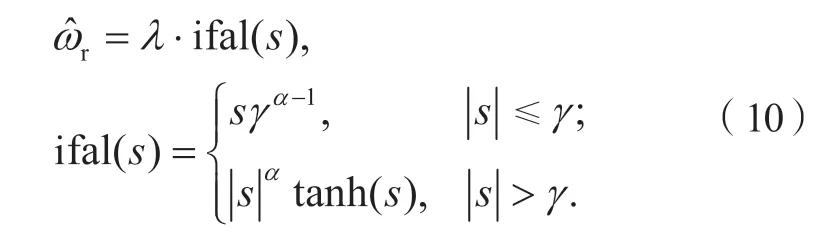
式中:ifal(·)是在原fal函數基礎上將開關函數sgn替換為雙曲正切函數tanh以進一步優化整體的控制性能。
為保證新轉速觀測器即式(10)的穩定性,構造Lyapunov函數如下:

結合式(2)、(9),x1可寫為

對式(12)兩端求導后可得:
對式(11)兩端求導并結合式(9)、(12)與 (13),得
依據Lyapunov穩定性判據,要使觀測器穩定,則需滿足(dV/dt) ≤0,根據式(14)可最終推導出當式(10)中的λ足夠大時,此時式(10)可滿足穩定性條件。
根據所設計的轉速觀測器,可得出轉子位置觀測值為

由上述可知:原MRAS、滑模MRAS與新型滑模MRAS之間的差異僅體現在自適應律方面,參考模型與可調模型均一致,且分別如式(2)、(3)所示,其各自的自適應律匯總于下表1。
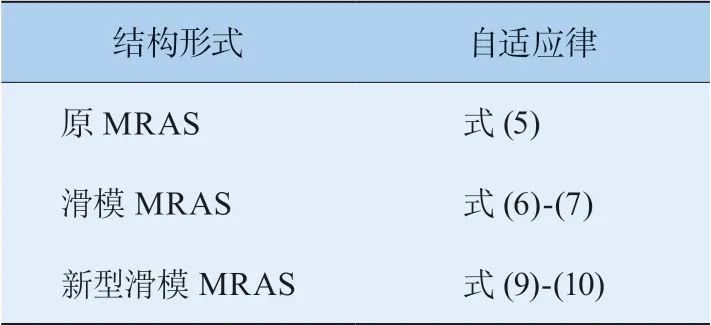
表1 自適應律結構對比
3 改進GWO算法設計
3.1 GWO算法理論
在灰狼群體中可以分為α狼、β狼、δ狼和ω狼4個等級,其中α、β、δ狼為群體中的領導狼,主要負責引導其余狼即ω狼來狩獵,其數量通常各設為1且將三者的位置分別作為算法的最優解、次優解和第三優解,ω狼的數量通常為幾十以上且將它們的位置作為算法的候選解。在每一次迭代中,通過適應度函數計算出每只灰狼所在位置的適應度值,來評價各灰狼位置的優劣,并同步更新α、β、δ及ω狼的位置,最后,將α狼的位置輸出即可得出每次迭代中算法的最優解。灰狼群體的捕獵行為分為包圍、追捕和攻擊3個階段。
包圍階段的數學表達式為:
式中:D為灰狼與獵物之間的距離向量;Xp(t)與X(t)分別為獵物與灰狼的當前位置向量;N為當前迭代次數;A和C為系數且定義如下:
式中:M為最大迭代次數;r1、r2為區間[0,1]內的隨機值。
追捕階段的數學模型可表達為
式中:Dα、Dβ、Dδ分別為α、β、δ狼與其余狼之間的距離向量;Xα、Xβ、Xδ分別為α、β、δ狼的當前位置向量;X為其余狼的當前位置向量。
在攻擊階段,由式(17)知,隨著迭代次數N逐漸從0升至M,a由2逐漸降至0,且A為區間[-a,a]內的隨機值,并當|A|≤1時,狼群在某一區域對獵物進行攻擊,突出局部搜索;當|A|>1時,狼群分散搜捕獵物,突出全局搜索。
3.2 GWO算法改進
由式(17)可得:隨著迭代次數N逐漸從0增至M,A的隨機取值區間由[-2,2]逐漸向中心對稱縮減為0。無論是在迭代前期還是在迭代后期,A值隨機落在區間[-1,1]內的概率都將大于落在,余區間的概率,從而,灰狼群體在整個捕獵過程中,局部搜索所占的比重大于全局搜索,此情況極有可能導致算法陷入局部最優解,以及出現過早收斂等現象。因此,合理的方案應為:在迭代前期,全局搜索占主導地位;在迭代后期,局部搜索占主導地位,即要求A值在迭代前期隨機落在區間[-1,1]內的概率小于落在其余區間的概率,在迭代后期反之。最后,依照要求,對A值賦予的新算法為:
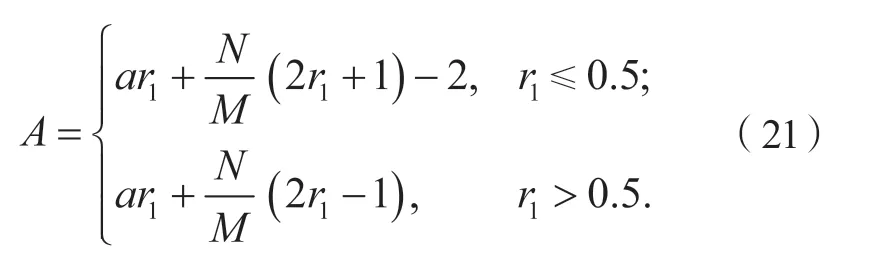
式(21) 可得:在整個迭代過程中A值隨機落在區間[-1,1]內的概率逐漸從0增至1,而落在其余區間的概率反之,即表明全局搜索的比重逐漸減小,而局部搜索的比重逐漸增大。此方法滿足了算法要求,可有效地改善算法性能。
3.3 改進GWO算法驗證
為驗證改進后GWO算法的可行性,選取某一二階延遲系統作為被控對象(其傳遞函數如式(23)所示),利用PI控制方法對其進行閉環控制,采用一水平階躍作為控制系統的給定值。其中,PI參數分別采用改進前的與改進后的GWO算法來進行整定。步驟如下:
步驟1:設置算法相關參數,包括種群規模S、最大迭代次數M等;
步驟2:對灰狼群體位置進行初始化;
步驟3:計算所有灰狼個體的適應度值,并排序,將排名前3的灰狼個體位置分別記為Xα、Xβ、Xδ,將Xα的坐標作為PI參數;
步驟4:按照式(18) -(21)更新灰狼個體位置;
步驟5:判斷算法終止條件(是否大于最大迭代次數M),若滿足,執行步驟6;否則,迭代次數N+ 1,然后執行步驟3;
步驟6:輸出PI參數值,算法運行結束。
仿真時,設定算法的最大迭代次數為100,灰狼種群規模為30,灰狼個體適應度值的計算選用時間乘以誤差絕對值積分(integrated time and absolute error,ITAE)函數指標,即
式中:e(t)為t時刻的期望值與實際值之間的差值。

PI閉環控制的Simulink仿真結構如圖1所示 (圖中,|u|代表絕對值,t代表時間,1/s代表積分),圖1中輸出端口1即為ITAE函數的輸出值。最后得出算法中α狼的適應度值隨迭代次數N變化的仿真結果如圖2所示。
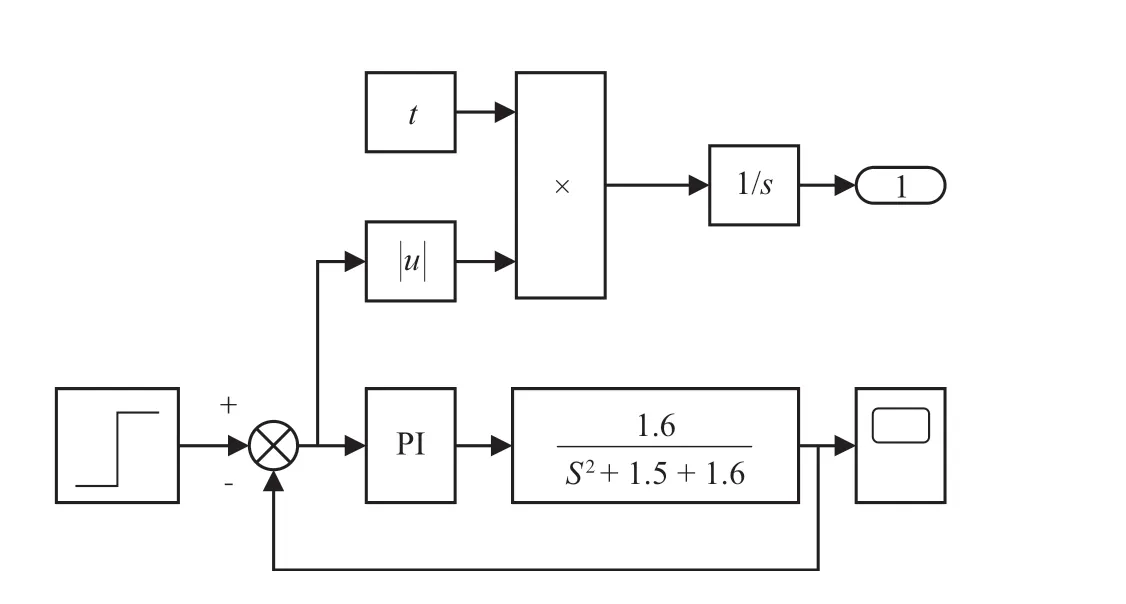
圖1 PI控制仿真結構圖
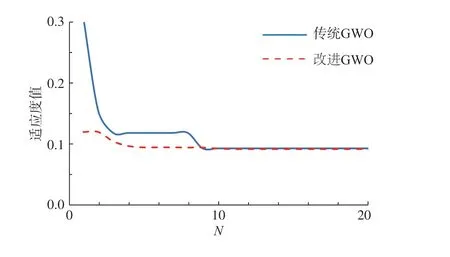
圖2 適應度值變化圖
由圖2可知:與傳統GWO算法相比,改進后的GWO算法收斂速度更快,結果更精確,由此證明改進措施是可行的。
4 建模與仿真分析
利用Matlab/Simulink建立基于d軸定子電流id=0的PMSM轉速電流雙閉環矢量控制系統模型,圖3所示為其結構框圖。
圖3中:n*為電機轉速給定值;id*、iq*分別為d-q軸坐標系下的定子電流給定值;iα、iβ與uα、uβ分別為α-β軸坐標系即兩相靜止坐標系下的定子電流和電壓;iA、iB、iC為A-B-C軸坐標系即三相靜止坐標系下的定子電流;Clark、Park與Park-1均為坐標變換法,SVPWM為空間矢量脈寬調制技術。
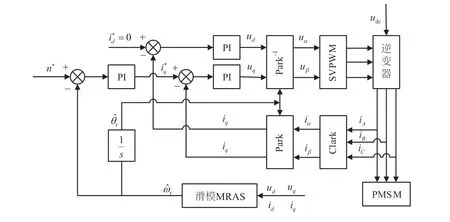
圖3 PMSM滑模MRAS結構圖
轉速環與電流環控制器采用PI控制,傳統轉速與轉子位置傳感器由滑模MRAS這一無傳感器控制技術代替以實時觀測電機轉速與轉子位置,滑模MRAS部分分別采用傳統滑模MRAS和改進的新型滑模MRAS。
設定PMSM的各參數為:定子電阻Rs= 2.875 Ω,定子電感Ls= 8.5 mH,轉子磁鏈ψf= 175 mWb,轉動慣量J= 0.8 g·m2,粘滯摩擦系數B= 1 mN·m·s,極對數pn= 4,直流母線電壓Udc= 300 V; 轉速環PI參數:kp= 10,kI= 25;電流環PI參數:kp= 1 000,kI= 2 000;傳統積分滑模面即式(6)中PI參數:Kp= 58,KI= 150;新型滑模面即式(9)中指數參數:g= 7,h= 3,p= 5,q= 3;傳統轉速觀測器即式(7)中參數:λ= 950。
新型轉速觀測器即式 (10)中參數:λ= 950,α= 0.65,γ= 4。
本文利用改進GWO算法來優化新型滑模面即式(10)中的各項系數a、b與c,優化步驟同3.3章節,適應度函數同式(22),且其誤差項最后通過仿真可得系數a、b與c隨迭代次數N的變化曲線如圖4所示。從圖4可知:最終優化所得參數為a=4.243,b= 2.706,c= 2.512。
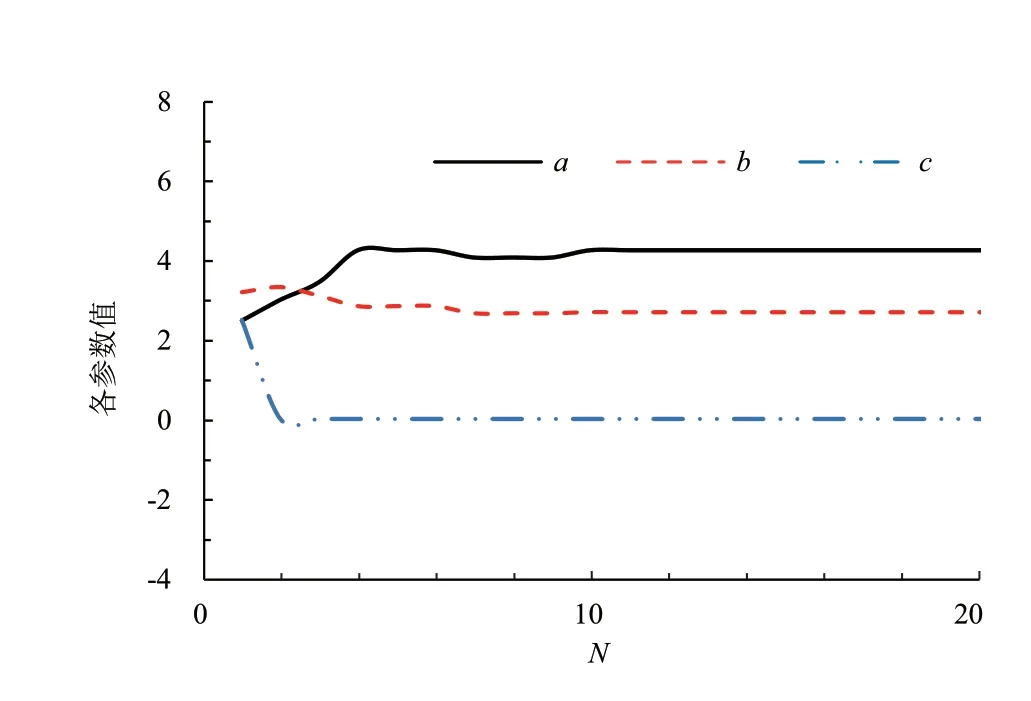
圖4 參數值變化
設定仿真工況如下:
工況1:參考轉速為1 000 r/min,負載為2 Nm,仿真時長0.8 s;
工況2:初始時刻參考轉速為1 000 r/min,在0.4 s升至1 500 r/min,在0.6 s降至1 200 r/min;負載初始為2 Nm,在0.4 s升至6 Nm,在0.6 s升至10 Nm,仿真時長0.8 s。
在工況1和工況2下所得的仿真結果分別如圖5 (見下頁)與圖6所示(見下下頁)。
從圖5、圖6中的轉矩響應曲線可看出:在工況1下的零時刻以及在工況2下的零時刻、0.4 s與0.6 s時,需要變化轉速,因此轉矩會產生一定的超調或下降,但均在極短的時間內得到了恢復。然而,相比于傳統滑模MRAS,改進后的新型滑模MRAS的轉矩脈動幅度在兩種工況下能夠減小75%以上,且去除了波形毛刺,平滑了響應信號。
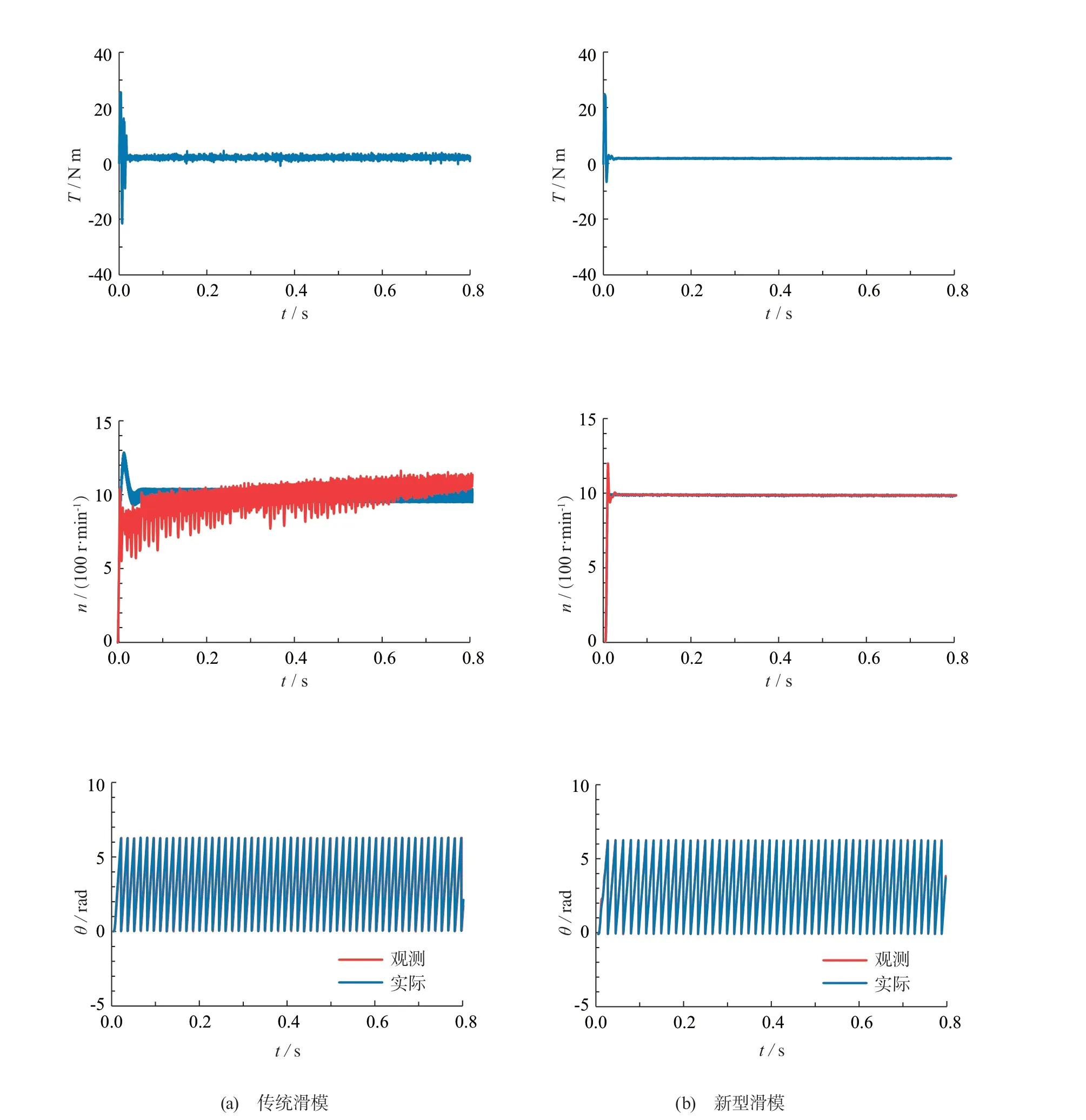
圖5 工況1下滑模MRAS響應曲線
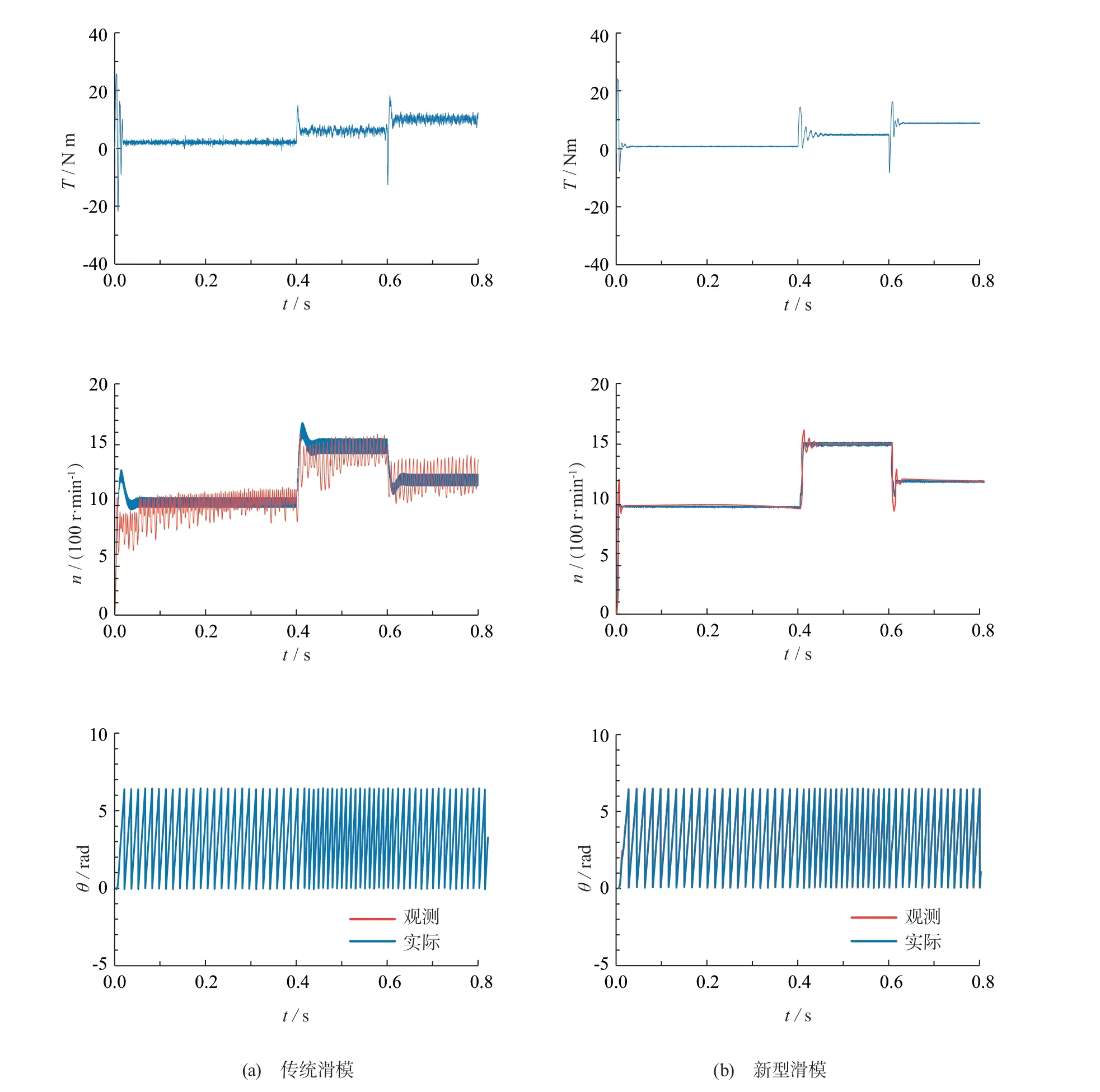
圖6 工況2下滑模MRAS響應曲線
從轉速響應曲線可看出:傳統滑模MRAS的實際轉速存在較大抖振,實際轉速在工況1下零時刻的超調約為25 %且調節時間約為40 ms,在工況2下零時刻的超調和調節時間與工況1大致相同,在0.4 s時超調約為13.3 %且調節時間約為40 ms,在0.6 s時約下降16.7 %且調節時間約為40 ms;觀測轉速與實際轉速相差頗大,基本失去了準確地跟蹤能力。而與傳統滑模MRAS相比,2種工況下新型滑模MRAS的實際轉速超調與調節時間能夠保持在2.3%與10 ms以內,且波形抖動幅度降低了近80%以上,觀測轉速能有效地對實際轉速進行精確跟蹤。
從轉子位置角響應曲線可看出:在2種工況下,改進后的滑模MRAS較傳統滑模MRAS能夠將轉子位置角觀測值與實際值之間的誤差減小60%以上,有效地提高了觀測精度。
此外,傳統控制方法下的轉子位置角響應周期比新型控制方法下的周期要短,其原因為傳統方法所帶來的轉速抖振較大,轉速可到達的上限值較高,由此使得轉子每次到達相同位置角時所用時間較少。
5 結 論
本文在傳統永磁同步電機(PMSM)滑模模型參考自適應系統(MRAS)基礎上,設計了一種新型滑模MRAS,利用改進的灰狼優化(GWO)算法對其相關參數,進行尋優整定。進行了仿真實驗。
結論是:與傳統滑模MRAS相比,改進的新型滑模MRAS能將系統轉矩脈動幅度減小75%,實際轉速抖動幅度減小80%,超調控制在2.3%以內,調節時間控制在10 ms以內,轉子位置觀測誤差減小60%。這使得PMSM動態與靜態控制性能得到了進一步增強。
參考文獻 (References)
[1] 尚飛, 霍海波. 永磁同步電機滑模變結構MRAS轉速辨識[J]. 電氣傳動, 2017, 47(2): 9-14.
SHANG Fei, HUO Haibo, Sliding mode variable structure MRAS speed estimator for permanent magnet synchronous motors [J].Electric Drive, 2017, 47(2): 9-14.(in Chinese)
[2] 李垣江, 董鑫, 魏海峰, 等. 基于改進模型參考自適應系統的永磁同步電機參數辨識[J]. 控制理論與應用, 2020,37(9): 1983-1988.
LI Yuanjiang, DONG Xin, WEI Haifeng, et al. Parameter identifification method of permanent magnet synchronous motor based on improved model reference adaptive system[J].Control Theory Appl, 2020, 37(9): 1983-1988. (in Chinese)
[3] 齊洪峰, 王軼歐, 閆一凡. 無速度傳感器永磁同步電機預測電流控制策略[J]. 北京交通大學學報, 2020, 44(2):119-128.
QI Hongfeng, WANG Yi’ou, YAN Yifan. Predictive current control strategy of permanent magnet synchronous motor without speed sensor [J].J Beijing Jiaotong Univ,2020, 44(2): 119-128. (in Chinese)
[4] Sahhary B, MA Zhixun, Kennel R, et al. Sensorless speed control of PMSM based on MRAC using active power [J].EPE J(Euro Power Elect Drives J), 2015, 25(2): 18-25.
[5] 繆仲翠, 王志浩, 李東亮, 等. 基于FOSM-MRAS觀測器的永磁同步電機MPTC系統[J].電機與控制學報,2020, 24(4): 121-130.
MIAO Zhongcui, WANG Zhihao, LI Dongliang, et al.Permanent magnet synchronous motor MPTC system based on FOSM-MRAS observer [J].Electric Mach Control, 2020, 24(4): 121-130. (in Chinese)
[6] Kim J S, Sul S K. New approach for high performance PMSM drives without rotational position sensors [J].IEEE Trans Power Electronics, 1997, 12(5): 904-911.
[7] 齊放, 鄧智泉, 仇志堅, 等. 基于MRAS的永磁同步電機無速度傳感器[J]. 電工技術學報, 2007(4): 53-58.
QI Fang, DENG Zhiquan, QIU Zhijian, et al. Sensorless technology of permanent magnet synchronous motors based on MRAS [J].Trans Chin Elec-tech Soc, 2007(4):53-58. (in Chinese)
[8] Samat A A A, Ishak D, Iqbal S, et al. Comparison between takagi sugeno FIS and PI controller: an adaptation scheme of MRAS for speed sensorless control of PMSM [J].Appl Mech Mate, 2015, 4079(5): 193-197.
[9] Zolfaghari M, Taher S A, Munuz D V. Neural networkbased sensorless direct power control of permanent magnet synchronous motor [J].Ain Shams Engineering J,2016, 7(2): 1-12.
[10] 鐘臻峰, 金孟加, 沈建新. 基于分段PI調節器的模型參考自適應永磁同步電動機全轉速范圍無傳感器控制[J].中國電機工程學報,2018, 38(4): 1203-1211+1297.
ZHONG Zhenfeng, JIN Mengjia, SHEN Jianxin. Full speed range sensorless control of permanent magnet synchronous motor with phased PI regulator-based model reference adaptive system [J].Proc CSEE, 2018, 38(4):1203-1211+1297. (in Chinese)
[11] 林茂, 李穎暉, 吳辰, 等. 基于滑模模型參考自適應系統觀測器的永磁同步電機預測控制[J].電工技術學報,2017, 32(6): 156-163.
LIN Mao, LI Yinghui, WU Chen, et al. A model reference adaptive system based sliding mode observer for model predictive controlled permanent magnet synchronous motor drive [J].Trans Chin Elec-tech Soc, 2017, 32(6):156-163. (in Chinese)
[12] 吳偉, 杜昭平. 改進MRAS的永磁同步電機無速度傳感器控制策略[J]. 微電機, 2019, 52(12): 53-58.
WU Wei, DU Zhaoping. Speed sensorless control strategy of permanent magnet synchronous motor based on improved MRAS [J].Micromotors, 2019, 52(12): 53-58. (in Chinese)
[13] 滕青芳, 柏建勇, 朱建國, 等. 基于滑模模型參考自適應觀測器的無速度傳感器三相永磁同步電機模型預測轉矩控制[J]. 控制理論與應用, 2015, 32(2): 150-161.
TENG Qingfang, BAI Jianyong, ZHU Jianguo, et al.Sensorless model predictive torque control using slidingmode model reference adaptive system observer for permanent magnet synchronous motor drive systems [J].Control Theory Appl, 2015, 32(2): 150-161. (in Chinese)
[14] 陳威, 董秀成, 周單, 等. 改進滑模模型參考自適應的PMSM無傳感控制[J]. 計算機應用研究, 2019, 36(12):3 788-3791.
CHEN Wei, DONG Xiucheng, ZHOU Dan, et al.Sensorless control of PMSM based on improved slidingmode model reference adaptive system method [J].Appl Res Computers, 2019, 36(12): 3788-3791. (in Chinese)
[15] Mirjalili S, Mirjalili S M, Lewis A. Grey wolf optimizer[J].Adv Engineering Software, 2014, 69(5): 46-61.
[16] 張小青, 李艷紅. 基于灰狼優化算法的神經網絡PMSM混沌同步控制[J]. 云南大學學報(自然科學版) , 2020,42(4): 664-672.
ZHANG Xiaoqing, LI Yanhong. PMSM chaos synchronization control of neural network based on grey wolf optimizer algorithm [J].J Yunnan Unive(Nat Sci Ed), 2020, 42(4): 664-672. (in Chinese)
[17] 陳琦, 王旭剛. 非奇異快速終端滑模及動態面控制的軌跡跟蹤制導律[J]. 國防科技大學學報, 2020, 42(1): 91-100.
CHEN Qi, WANG Xugang. Trajectory tracking using nonsingular fast terminal sliding mode control and dynamic surface control [J].J National Univ Defense Tech, 2020, 42(1): 91-100. (in Chinese)