GNSS-R形變監測技術綜述
2021-10-15 04:11:52嚴頌華唐鳳雨陳永謙
無線電工程 2021年10期
嚴頌華,唐鳳雨,陳永謙,李 焱
(武漢大學 遙感信息工程學院,湖北 武漢 430070)
0 引言
山體滑坡和地表沉降是破壞程度嚴重的地質災害,每年在世界范圍內發生頻繁且破壞力巨大。在預警體系中,通過對形變量這一直接反映地表穩定性以及運動狀態的物理量進行厘米級甚至毫米級的監測,得到其發展過程,對科學研究及防災減災都具有重要意義。
在形變監測技術方面,傳統大地測量方法例如基于全球導航衛星系統(Global Navigation Satellite System,GNSS) 直達信號的方法已運用廣泛,即在建筑物、山坡等形變體上布放多個GNSS天線,通過對天線的高精度差分定位來實現形變監測。該技術屬于點觀測,只能估算天線所在點的形變參數,適用于橋梁、大壩等重點監測對象,無法實現大面積觀測。該方法需要把GNSS天線固定在形變體上,屬于接觸式觀測,在某些形變危險點無法布設。非接觸測量方法常被使用但有其缺點,如三維激光掃描法能夠得到形變的三維數據,缺點是成本高、容易受天氣影響。地基干涉合成孔徑雷達(GB-InSAR)也被廣泛用于形變監測,優點是分辨率較高,但成本也高。星載SAR作為地質災害識別與監測的主力裝備[1],能夠長時間地工作,且具有較大的監測范圍和較高的空間分辨率,但是受到SAR衛星較長重返周期的限制,無法提供短時間內連續的形變信息。
隨著GNSS星座的不斷增加和GNSS-R遙感的發展,研究者們也在前期應用的基礎上將該技術拓展到了形變監測領域。本文的特色在于主要介紹GNSS-R遙感從海面遙感延伸到陸地遙感和形變的過程,闡述GNSS-R形變監測的3種典型方法 (基于成像、鏡反射、以及目標探測的監測方法)的由來、執行過程和優缺點。最后總結出挑戰和未來可以值得研究之處,期望能為相關從業人員提供參考和借鑒。
1 GNSS-R遙感應用
GNSS-R技術的基本思想是利用雙基地雷達的概念,即GNSS衛星持續不斷地向地面發射L波段的導航電波信號,經過地面反射后,被星載/機載/地基接收機接收,從這些回波中提取電波的參數,可以反演或估計出地面物體的信息。這種技術也稱為被動雷達或者外輻射源雷達技術。
GNSS-R技術已經被廣泛運用于地球表面遙感中。楊東凱等[2]構建了利用GPS散射信號的機載海面風場反演系統。嚴頌華等[3]利用該技術反演土壤濕度。孫越強等[4]提出了基于樹模型的機器學習方法反演海面風速。張云、尹聰等[5-6]在渤海區域做了多次海冰監測。近些年來各航天大國先后發射搭載反射接收機的衛星,如美國發射了CYGNSS星座,歐空局發射了TDS-1衛星,航天五院發射了“捕風”AB星,天津云遙公司發射了商業星載GNSS-R海洋反射探測載荷,GNSS-R技術進一步在時間和空間維度上得到擴展。例如Hammond 等[7]利用TDS-1衛星的數據得到了3年內海面風速的時間變化規律,Nguyen等[8]基于商業的Spire星座,在掩星數據之外收集了掠入射情況下的GNSS反射事件,從中提取了海面測高信息,測高精度達到3 cm。 Cartwright 等[9]使用33個月的TDS-1的數據研究北極和南極區域的海冰分布,與歐空局發布的海冰聚集度產品相比,吻合度超過96%。Gerlein等[10]利用CYGNSS的數據研究了內陸水體的變化,反映湖泊和水體的擴展和收縮過程,結果和MODIS產品相符,由于CYGNSS的全球性和短周期性,能夠在半個月的時間間隔內產生一個水災分布產品。這些研究成果極大地鼓舞了GNSS-R研究者拓展該技術到形變監測應用的信心,也提供了技術積累。
2 GNSS-R形變監測技術的優勢
GNSS-R用于形變監測時具有以下優勢:
(1) 導航信號可以實現全球覆蓋。導航系統由多個軌道的多顆衛星在太空不間斷地運動,例如2020年7月我國正式開通的北斗衛星導航系統目前在軌運行的有數十顆,包括三種衛星:靜止軌道(GEO)衛星、傾斜地球同步軌道衛星(IGSO)和中圓地球軌道(MEO)衛星,聯合其他導航系統可以組成一個探測網,使地球上任何一點都能夠被覆蓋到,在很大程度上提高了監測區域的靈活性。GNSS衛星、目標和接收機三者構成了多基地的雷達系統,因此可獲得多視角后向散射與非后向散射信息、便于實現多維形變量觀測。
(2) 導航衛星短的重返周期可以保證地面圖像的相干性。目前GPS與北斗衛星導航系統的IGSO衛星和MEO衛星的重返周期為一天,遠遠優于現有SAR衛星的重返周期,可以避免由于時間跨度長而導致的時間去相干和空間去相干。
(3) 導航衛星所使用的頻段為L波段,該波段對云層和地表植被具有一定的穿透能力,因此可以克服天氣障礙,全天候工作其波長為數十厘米,進行形變監測時精度可以達到厘米級別。此外,導航系統都設置有雙頻信號,可以通過多頻組合的方式來獲取水汽信息,從而解決水汽引起的相位延遲問題,有助于提高形變測量精度。
(4) 導航系統設有高精度的原子鐘系統,所以GNSS衛星信號本身具備高精度的標準時間信息,因此可以通過接收導航衛星直達信號來實現收發兩端的時間同步。此外,導航衛星信號的捕獲與跟蹤技術已經非常成熟,能夠確保收發兩端的相位同步,在實現相位提取乃至形變測量上有保證。
(5)北斗衛星導航系統現在是多顆衛星形成多基地發射,系統有3個頻段同時工作,可以利用多角度、多方位、多頻段信號監測,提高形變測量精度和空間分辨率。
3 GNSS-R形變監測技術研究現狀
GNSS-R技術在海面風場和土壤濕度應用方面已經發展多年,但是在形變方面的應用并不成熟。2013年Liu等[11]提出了利用GNSS構成的雙基地雷達實現SAR成像,并利用這種圖像在2個連續時刻的細微變化來測量地面變化,稱之為CCD(Coherent Change Detection)方法。 2015年Zeng等[12]提出了基于空基表面成像雷達的沉降監視技術,其基本思路是利用2個地面站來接收同一顆衛星的信號,其中一個作為基準站來去掉大氣層和電離層誤差,而另外一個站則用來模擬形變,通過抽取峰值回波信號的相位來獲得由于路徑引起的相位差,再根據幾何關系計算形變的大小。2019年 Yang等[13]提出利用坡面反射以及雙通道獨立處理的軟件接收機思路來反演形變。2021年Li等[14]提出利用北斗GEO衛星的幾何不變性,以金屬板作為反射目標板,結合多通道接收機進行形變測量的思路。
由于GPS系統布設較早,以前的算法大多圍繞該系統的運動衛星來構思,由于導航信號不像SAR信號專門為高分辨雷達所設計,其頻帶帶寬、發射功率相比專用雷達而言存在諸多限制,因此在形變研究方面還處于起步階段。表1給出了目前GNSS-R 形變監測技術的主要情況。

表1 目前GNSS-R 形變監測技術的主要情況Tab.1 Main situation of current GNSS-R deformation monitoring technology
4 GNSS-R形變監測的幾種典型方法
4.1 基于成像的形變監測方法
英國伯明翰大學和北京理工大學共同提出了空基雙基地類SAR成像(Space-Surface Bistatic Synthetic Aperture Radars),即SS-BSAR的理論,并進一步提出了基于成像圖的形變監測方法。該方法類似于星載SAR數據的干涉方法,SS-BSAR理論是其研究基礎。
SS-BSAR的成像結構及圖像序列用于形變監測示意如圖1所示。

(a) SS-BSAR 成像結構
(b) 形變監測圖1 SS-BSAR 成像結構圖及圖像序列用于形變監測示意Fig.1 Schematic diagram of SS-BSAR imaging structure and image sequence for deformation monitoring
該方法包含2個步驟:第一步,SS-BSAR成像,即處于不同接收平臺上的反射接收機(星載/機載/地基)接收從地表反射的信號,利用運動的GNSS衛星形成合成孔徑,從而配合后向投影成像算法,形成合成孔徑圖像;第二步,利用以1天為重返周期的合成孔徑圖像序列,檢測相位的變化,達到形變監測的目的。
SS-BSAR成像主要利用IGSO/MEO衛星的運動,研究進展迅速。2005年Zeng等[15]給出了不同軌道下衛星對地成像的距離向和方位向分辨率分析。2007年Antoniou 等[16]提出了條帶式合成孔徑成像的算法,之后在文獻[17]中進一步提出了一種機載情況下快速成像的方法。2012年Zhou等[18]給出了一種預處理方法來增強成像中同步的效果,Liu 等[19]則研究了采用地基靜態接收機在長相干積累時間下點擴散函數的方位分布。2014年Zhang 等[20]研究了重返情況下2幅影像的空間去相關情況,2015年Ma等[21]研究了運用伽利略衛星時成像分辨率提高的方法。同一年,文獻[22]研究了多角度條件下成像融合的方法。2016年Santi等[23]提出了利用多衛星成像提高分辨率的方法。
利用SS-BSAR成像圖,研究者提出了基于干涉的形變監測算法,即針對成像序列,進行同名點匹配,然后計算匹配圖像對的相位差別,并與基線結合進行形變測量。2018年Liu等[24]利用SS-BSAR的概念,提出了一個3維形變測量的方法,其基本思路是依據干涉SAR的方案,利用IGSO衛星的周期為1天的重返軌道,在每天近乎同一個時刻,采集15 min的數據,對地面反射物進行成像,然后尋找永久散射體,求取永久散射體的相位。在實驗設計中,首先利用2行軌道參數TLE 計算IGSO衛星的軌跡,然后根據衛星的運動軌跡,按照星載GNSS-R的分辨率理論,計算其在地面的成像分辨率。之后選擇地面成像分辨率較高的下午4點作為實驗時間段,根據位置精度強弱度(Position Dilution of Precision,PDOP)理論選擇北斗二代IGSO1,2,4,5衛星作為實驗星。最后,根據后一天和前一天相位的差別來估計形變。實驗采用精密度達到0.01 mm的形變臺搭載轉發器,利用人工調節形變臺改變轉發器的位置模擬形變,針對轉發器實施成像。在2016年5月—6月間記錄了16組數據,其中包含2次10 mm的位移和一次20 mm的位移。實驗結果表明,精度優于0.5 cm。
該方法實施的主要問題是需要很強的反射信號,特別是在3個維度的方向都具有很強反射的形變體,需要在大量的現場實驗和環境中去尋找,因此需要進行更多的野外現場實驗。
4.2 基于鏡反射的形變監測方法
香港理工大學提出利用邊坡斜面構成的鏡反射現象,通過軟件接收機進行形變探測。該方法起源于GNSS-R海面高度探測技術,由于海面是大面積的水平面上下移動,而形變監測則假設坡面沿著法向移動。利用GNSS衛星構造鏡面反射測量坡面位移示意如圖2所示。 利用2個斜面L1和L2來表示形變前后的地表,而形變量則用ddif來表示。GNSS衛星發射的信號在斜面上以鏡反射的方式返回,被反射天線接收,同樣在接收機中進行處理。該方法借鑒了GNSS-R對海面高度的估計技術。

圖2 利用GNSS衛星構造鏡面反射測量坡面位移示意Fig.2 Using GNSS satellite to construct specular reflection to measure slope displacement
針對海面高度的研究由來已久,2011年Fabra等[25]計算了同極化和交叉極化反射信號的差分相位,考慮海冰表面的粗糙度因素,將海冰表面高度估計的結果與北極潮位模型AOTIM-5 得到的結果比較,誤差在10 cm左右。2016年Lestarquit等[26]使用加泰羅尼亞通信中心研究的開源軟件接收機,采用主從式結構,在生成DDM圖的基礎上提取出反射信號的相位,然后通過幾何關系來計算高度。實驗設備布置于60 m高的燈塔上,通過在平靜海域的高度測量,驗證了接收機的可行性,之后的飛行實驗表明均方根誤差在9.47 cm。2017年Liu等[27]分析了海面高風速條件下瑞典翁薩拉天文臺的數據,利用載波相位來去除非相干成分,從而留下相干成分來觀測海面高度。2019年Hu等[28]分析了低軌衛星攝動對海面高度反演的影響,指出攝動會引起約3.4 m的平均誤差。2020年Wu等[29]利用岸基接收機分別生成直達信號和反射信號的DDM圖,然后從偽碼延遲和載波相位延遲的角度討論了風速小于1.5 m/s時海面高度值,表明載波相位法的精度遠高于偽碼測距法的精度,均方根誤差在8 cm左右。
在此基礎上的GNSS-R形變監測研究方案[30]首先估計直達信號與反射信號由于距離差引起的額外的載波相位差,然后估計斜面的位移。具體實施是通過直達天線和反射天線將直達與反射信號采集后,在硬件接收機中完成信號放大、下變頻和模數轉換后,得到離散的時域信號,送入軟件接收機。在軟件接收機中對每個通道進行單獨的跟蹤,通過調節本地鎖相環路中的數字控制振蕩器NCO 完成時間、頻率和相位的同步,通過相干積分來得到載波相位。比較直達信號與反射信號的載波相位差得到傳播路徑的延時,計算形變量。
該方法的最大特點是需要維持直達和反射信號都具有足夠的信噪比,從而保證2個信號可以單獨被跟蹤,如同2個差分接收機。同時,該方法還需要假設反射面變化發生在衛星信號的相干時間內運動衛星引起的相位變化趨勢才會被去掉。因此該方法只適合于短期內快速形變監測,實際應用場景還需要進一步拓展。
4.3 基于目標探測的形變監測方法
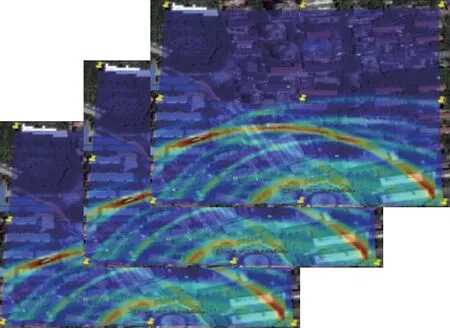
基于目標探測的形變監測示意如圖3所示。武漢大學從目標探測的角度出發,嘗試將形變體看成一個目標,采用雙通道接收機,但是在信號處理時將形變體視為探測目標,首先進行距離壓縮,然后在同一距離元內進行目標相位識別,從而監測形變。

圖3 基于目標探測的形變監測示意Fig.3 Deformation monitoring based on target detection
該方法的基礎是目標探測,是GNSS-R雙基地雷達的一個典型應用。2017年Ma 等[31]利用GNSS機會信號構造雙基地雷達探測海洋表面目標,發展了信號處理算法,并通過海邊船只實驗證明了該算法的正確性。2018年Pastina等[32]指出增加相干積累時間才能夠得到足夠的信噪比來檢測目標,并給出了一種幀間補償的方法來累積長相干積累時間內的能量。同年,Ma等[33]提出了一種利用多顆衛星和單個接收機對反射目標定位的理論框架,表明即使發射衛星在移動,該方法仍然能夠適用。2019年Santi等[34]提出了一種利用多顆衛星的被動多站雷達系統,即利用空間多樣性和長相干積分時間提高信噪比,同時也增加定位的精度,利用伽利略衛星和萊茵河上的船只進行實驗驗證了這一想法。2020年Gu等[35]將超分辨率分析方法結合GEO衛星用于GNSS-R目標探測。
GNSS-R形變量監測實際上是檢測目標在同一距離元內相位的變化。文獻[14]主要利用北斗衛星導航系統的GEO衛星,這種衛星相對觀測者具有固定的仰角和方位角,因此幾何結構固定,可以避免由于衛星運動帶來的相位變化,從而很好地反映形變引起的相位變化規律。其方案是針對斜坡形變體,同時考慮到發射衛星、形變體和固定接收機的幾何構型,將雙基地雷達盡量構造成一種準單站雷達的形式,然后采集信號。在下變頻處理得到中頻信號后,首先進行距離壓縮,在距離上將形變體目標和其他目標區分開,然后針對形變體進行信噪比增強處理,之后進行相位抽取。沒有發生形變的時,這個相位維持不變,而當發生形變時,這個相位會隨之變化。通過相位和形變的幾何轉換關系可以將形變量估計出來。
該方法的優點是不需要設置轉發器在形變體上,克服了轉發器需要供電的問題。該方法的難點是需要尋找合適的反射體,能夠具有較強的反射信號,從而保證反射信號的相位測量具有一定的穩定度和精度。
5 GNSS-R 形變測量面臨的挑戰
綜合目前研究可見,在利用導航反射信號進行形變監測時面臨著以下挑戰:
(1) 導航衛星信號的反射功率比較弱。導航衛星距離地面遙遠,信號到達地面時強度在-160 dBW 左右,經過地面目標散射之后,信號會變得更加微弱。陸地反射與海面反射還存在較大區別,因為海面空間尺度大,而地面結構復雜,造成接收機直接獲得信號的信噪比不高,后續處理存在難度,需要深入研究。
(2) 導航衛星信號的帶寬比較窄,導致空間分辨率差,給形變監測帶來很大的困擾。傳統的SAR成像在形變測量上能達到毫米級的分辨率,是因為其信號具有300 MHz以上的帶寬。而目前在軌運行的導航系統所發射的信號帶寬只有20.46 MHz,因此其成像在理論上能獲得的最佳距離分辨率為幾米。這種距離分辨率只適用于分辨率要求不高的場合,需要解決。
(3) 導航衛星信號的體制與普通SAR不同。導航衛星信號實際上是一種脈沖體制雷達的變形,其信號是偽隨機編碼的連續波信號,因此處理上與線性調頻體制的雷達存在區別。
(4) 成像處理方式上不同。雙基地雷達的成像體制與SAR衛星相對于地面的直線運動方式不同,導航衛星在長時間內相對于地面為曲線運動,只能在數十秒的時間內軌道認為近似直線,若要獲得更高的增益,必須考慮衛星軌道的曲線而采用分段采集的方法進行接收。
6 結束語
GNSS-R形變研究是導航反射信號遙感研究領域中具有發展潛力的研究熱點,本文對近年來公開發表的相關文獻進行分析和總結以供借鑒。得益于各國蓬勃發展的導航星座系統和導航接收機硬軟件的發展,GNSS-R形變研究沿著多條技術路線展開,采用的衛星從IGSO/MEO到GEO等不同軌道衛星變化,設備也從純粹硬件到軟硬件結合。后續應加強針對形變需求的算法研究,提高該技術的實用性和魯棒性。
目前,GNSS-R形變監測技術才剛剛起步,本文認為其未來發展趨勢和需要努力的方向如下:
(1) 推進測量精度由厘米級向毫米級發展
目前GNSS-R形變監測給出的測量精度都在厘米級,而且還取決于信號相位的穩定性和接收系統對于相位的辨識度。未來若建立物理模型,在考慮地表因素對形變測量結果的影響,如植被覆蓋、地面高程、地表坡度的情況下,測量精度將會有望逐漸由厘米級精度提高到毫米級。
(2) 提高地表形變監測的時間連續性和空間分辨率
目前都是針對局部區域、短時間內的形變進行GNSS-R研究。未來在條件具備后,該技術將有可能提供針對大區域或全球范圍的形變監測,在時間上也將能夠提供連續不斷的數據,確保對不同形變速度的形變體進行時間無縫的監測。
(3) 搭載平臺由地基向機載和星載發展,提高其易用性
目前GNSS-R形變實驗主要還在地面進行,采用的接收機都放置在地面,實際監測是小范圍的,遠遠不能滿足未來大范圍形變監測的需要。未來接收機搭載在更高的平臺上顯然會增加形變探測的距離,如機載和星載平臺,這樣監測會更靈活高效。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34