基于慧魚模型的雙絞龍式屋頂冰雪清除裝置設計
2021-10-15 09:08:42龔可祎楊婉振王盛熹吳何畏
機械管理開發 2021年9期
關鍵詞:設計
龔可祎,謝 靜,楊婉振,王盛熹,吳何畏
(湖北文理學院機械工程學院,湖北 襄陽 441053)
引言
我國北方地區幅員遼闊,冬季降雪持續時間長,屋頂冰雪的積累易對房屋造成安全事故,但由于國內冰雪清除機械的開發較晚,產品類型和功能尚不完備,只能用于除雪或者除冰專用,而屋頂冰雪清除機械市面上種類較少。國外的屋頂冰雪清除機械雖然種類齊全,但設備結構復雜且造價昂貴,不適于大范圍推廣應用。基于此本文基于慧魚創意組件設計了一種雙絞龍式屋頂冰雪清除裝置,該裝置可工作于不同結構屋頂,實現破冰和除雪作業,同時具有自動化程度低等特點。
1 設計方案
雙向絞龍屋頂冰雪清除機整體結構圖,如圖1所示,主要由刮雪鏟、雙向絞龍除雪機構、雙軌行進機構、ROBOPRO控制系統、積雪探測系統等組成。
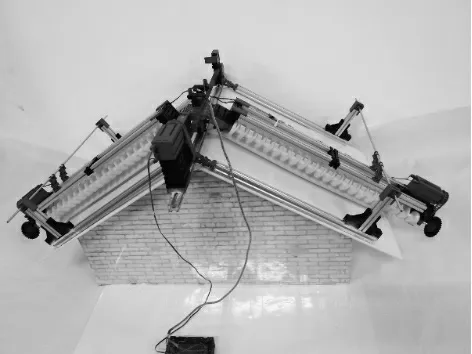
圖1 總體結構圖
工作原理:雙向絞龍冰雪清除機構位于房頂的兩側,通過鉸鏈與雙軌行進機構相連,絞龍設置在背負式機架下方,絞龍邊緣設有破冰錐[1-2];雙軌行進機構固定在機架下方,通過絲杠螺旋轉動,帶動冰雪清除機行進。絞龍固定在刮雪鏟的內部,設在房頂的兩側,每側有兩根絞龍,采用齒輪鏈條傳動,外設有保護套,在齒輪傳動下使得兩根絞龍轉動方向相反。刮雪鏟邊緣仿錘狀,對積雪進行輔助性清除。
2 雙向絞龍除雪機構的設計
雙向絞龍除雪機構設在房頂的兩側,每側有兩根絞龍,采用齒輪鏈條傳動,外設有保護套;在齒輪的帶動下使得兩根絞龍轉動方向相反[3-4]。絞龍實現屋頂積雪切削、集中和拋投功能,絞龍邊緣設有破冰錐,破冰錐將因溫度過低時而結冰的積雪打碎,提高了絞龍的工作效率。如圖2所示。
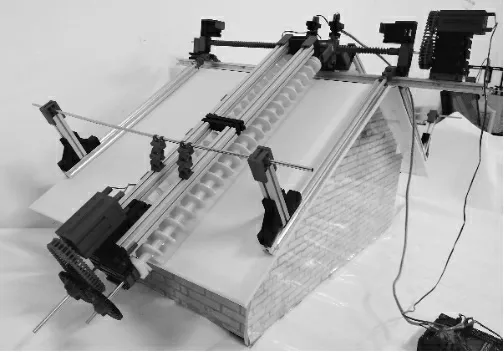
圖2 雙向絞龍除雪機構圖
對于絞龍底部少量未清除的積雪,通過刮雪鏟將雪鏟起,達到高度后絞龍將雪從屋頂送下;刮雪鏟采用invertor軟件進行建模。刮雪鏟圖如3所示。

圖3 刮雪鏟設計結構圖
該模塊依靠傳動裝置提供前進動力使得積雪在重力和屋面斜度的作用下沿鏟體滑落。刮雪鏟之間通過鉸鏈連接,在重力的作用下刮雪鏟自然下垂,且預設有扭簧接位,在遇到障礙物時刮雪鏟的邊緣會自動彈起,增加了裝置的適應性。
3 背負式機架的設計
背負式機架主要起支撐作用,有四根軸通過鉸鏈與中心軸相連,四根軸平放在屋頂四周。絞龍在工作時由背負式機架完成對于冰雪去除機的穩定支撐;通過鉸鏈連接,使得冰雪去除機可適用于不同坡度的屋頂作業。同時背負式設計,使得冰雪清除機安裝和拆卸更為方便,裝置直接放置與房屋上,即可開始工作,且無需對房屋進行大規模的改造。在軸上有鉸鏈與軸連接,在遇到障礙物時可自動越過避障。如圖4所示。
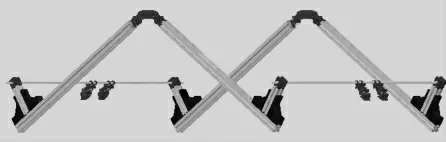
圖4 背負式機架設計結構圖
4 雙軌行進機構的設計
雙軌行進機構的作用是連接屋頂兩側的裝置并通過電機帶動絲杠螺旋傳動進而讓除雪機在屋頂行進。
慧魚步進電機通過齒輪傳動使絲杠轉動,進而帶動除雪機移動;齒輪傳動,絲杠傳動保證了兩側裝置的速度同步;同時絲杠傳動避免了因積雪的影響而造成除雪機移動出錯;雙軌行進機構底座鏈接于限位導軌,起到受力支撐作用,讓絲杠不受力,提高了絲杠的使用壽命,同時也可使用戶自行調節絞龍與屋面的距離;限位導軌避免屋頂兩側裝置在行進過程中的速度不均衡,提高了裝置在行進過程中的穩定性;機構頂部外加雨棚,保護裝置不受雨雪等天氣影響。如圖5所示。
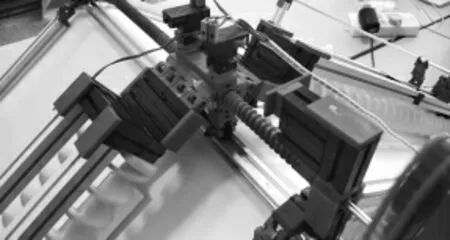
圖5 雙軌行進機構圖
5 控制系統的設計
該設計是基于慧魚ROBO TXT為主控制器的雙向絞龍屋頂冰雪清除機控制系統,整個系統由ROBO TXT為主控制器,Mini swith微動開關,Encoder moto步進電機等和雙向絞龍屋頂冰雪清除機組成[5-6]。
控制方案的設計需要了解除雪的過程,如圖6所示。當用戶啟動裝置后,除雪機處于待機狀態,積雪探測系統開始檢測積雪厚度,當積雪厚度達到預定值后,雙向絞龍除雪裝置將屋面積雪切削、集中和拋投。絲杠開始轉動帶動除雪機開始在屋頂行進,當雙軌行進機構的傳感器接觸到屋脊兩邊擋板后,控制器接收到信號,ROBOPRO控制電機反轉,進而絲杠反轉,除雪機開始反向運動;當積雪厚度降到預定值以下后,裝置自動歸位處于待機狀態[7]。
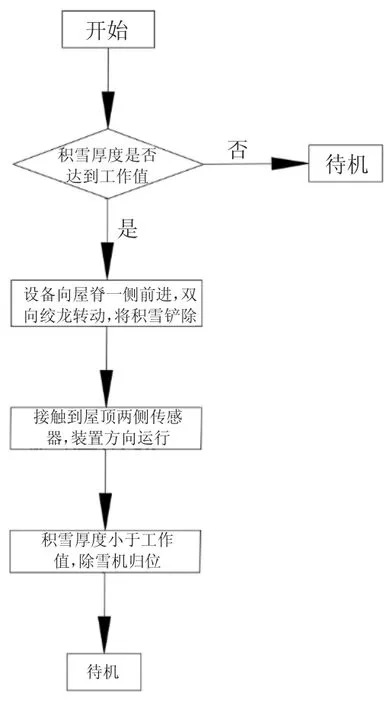
圖6 除雪機工作流程圖
從除雪機運動過程可以看出,在控制系統中,檢測環節尤為重要。若檢測環節平出現問臺題,就會在積雪厚度不夠的情況下啟動,浪費電能。
同時在運行過程中需要設計保護程序,當除雪機在冰雪清除機因障礙物的存在而無法行進或者電機停止工作,系統自動切斷工作電源,發出警報,并將信息傳遞到用戶顯示屏,如圖7所示。
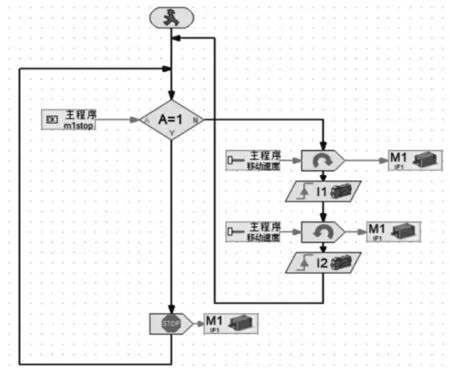
圖7 主程序圖
6 結論
實驗結果表明,該裝置實現了對屋頂冰雪的有效清除。相較于現有的屋頂除雪裝置,改裝置具有自動化程度低,可工作于不同結構的屋頂,實現破冰和除雪的同時作業,具有較好的市場前景。同時在設計中綜合運用電子控制技術,以達到預期的工作效果,可直接用于機械課程創新教學。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
