雙絞龍式屋頂冰雪清除裝置的設(shè)計
2021-10-15 09:08:44龔可祎吳何畏
機(jī)械管理開發(fā) 2021年9期
謝 靜,龔可祎,吳何畏
(湖北文理學(xué)院機(jī)械工程學(xué)院,湖北 襄陽 441053)
引言
我國冬季來臨時,大部分地區(qū)會有3~5個月的降雪期,降雪后若不及時清理積雪,積雪會使屋頂?shù)呢?fù)重加大,甚至可能導(dǎo)致安全事故。同時,積雪會發(fā)生“夜凍晝化”現(xiàn)象,這種現(xiàn)象所產(chǎn)生的破壞應(yīng)力會使墻體鋼筋疲勞強度降低,從而影響房屋的使用壽命。現(xiàn)階段我國屋頂除冰雪最普遍的方式就是人工除冰雪,即單純?nèi)斯ぷ鳂I(yè)或人工借助小型的除冰雪工具進(jìn)行清除冰雪,這些方式效率低下,且存在一定的危險性,同時也無法及時清除積雪[1-2]。在機(jī)械除冰雪領(lǐng)域,由于國內(nèi)冰雪清除機(jī)械研發(fā)起步較晚,目前多用于道路清除冰雪,產(chǎn)品類型和功能單一,只能專用于除冰或除雪,而屋頂冰雪清除機(jī)械才剛起步,技術(shù)尚不成熟。雖然國外屋頂除冰雪機(jī)械種類齊全,但大部分是大型除冰雪機(jī)械。采用在工程車輛上安裝除冰雪設(shè)施,設(shè)備結(jié)構(gòu)復(fù)雜,造價昂貴,不能被廣泛應(yīng)用[3-4]。本文設(shè)計了一款能夠?qū)崿F(xiàn)在暴雪天氣下,自動清除屋頂冰雪的裝置,該裝置具有適用于現(xiàn)有房屋結(jié)構(gòu),破冰除雪一體化作業(yè),自動化程度較高,冰雪清除效率高等特點。
1 設(shè)計方案
雙絞龍式屋頂冰雪清除裝置總體結(jié)構(gòu)圖如圖1所示,主要由雙絞龍冰雪清除機(jī)構(gòu)、履帶式行走機(jī)構(gòu)、背負(fù)式機(jī)架、仿形刮雪鏟、傳動行程限位裝置和STM32F103RCT6單片機(jī)控制系統(tǒng)等組成。
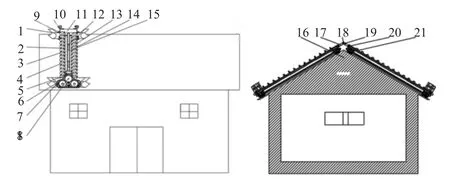
圖1 總體結(jié)構(gòu)圖
雙絞龍式屋頂冰雪清除裝置工作原理。背負(fù)式機(jī)架采用鉸鏈連接,使得冰雪清除裝置可改變工作角度,使其可安裝于不同的屋頂;絞龍由電機(jī)驅(qū)動,在皮帶和皮帶輪的傳動下同步旋轉(zhuǎn)。同時絞龍葉片邊緣設(shè)置有可拆卸的破冰刀;履帶式行走機(jī)構(gòu)位于機(jī)架的下方,帶動冰雪清除裝置移動;在運行過程中,雙絞龍和刮雪鏟組合,可實現(xiàn)破冰除雪一體化作業(yè);當(dāng)傳動行程限位裝置接觸到屋脊兩邊擋板后,控制系統(tǒng)控制履帶式行走機(jī)構(gòu)反向運動,冰雪清除裝置反向工作,實現(xiàn)往返除雪[5-6]。
2 雙絞龍冰雪清除機(jī)構(gòu)
絞龍固定在屋頂?shù)膬蛇叄捎闷Ш推л唫鲃印=g龍的刃口曲線采用阿基米德螺旋曲線,并在葉片上設(shè)置了可拆卸的螺旋排列的破冰刀,旋轉(zhuǎn)的螺旋裝置兼有清除和推送功能。該滑切入雪的工作方式,工作平穩(wěn),可減少功率消耗,降低清除冰雪阻力,減少振動,如下頁圖2所示。
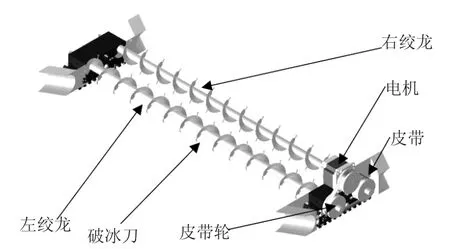
圖2 雙絞龍式冰雪清除機(jī)構(gòu)圖
3 刮雪鏟的設(shè)計
仿形刮雪鏟依靠裝置前進(jìn)的動力將絞龍與屋頂之間積雪鏟起,刮雪鏟鏟體呈仿錘狀,與擋雪板之間通過鉸鏈連接,刮雪鏟在重力的作用下自然下垂,且預(yù)設(shè)有扭簧接頭,在遇到障礙物時刮雪鏟的邊緣會自動彈起,增加了裝置的適應(yīng)性。積雪由于受自身重力的影響,具有沿著鏟體向下滑移的趨勢。同時鏟體的設(shè)計應(yīng)盡可能使積雪遠(yuǎn)離房屋堆置。
鏟面形狀為漸開線型,漸開線的參數(shù)方程為:
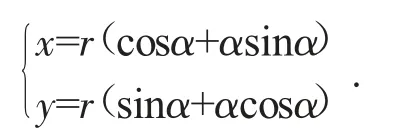
式中:r為基圓半徑,mm;α∈[0,2π]。
經(jīng)計算,當(dāng)刮雪鏟的上曲面的切線方向與豎直方向的夾角呈75°時,可有效控制清除冰雪過程冰雪顆粒飛濺的范圍。如圖3所示。
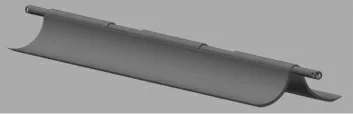
圖3 刮雪鏟設(shè)計結(jié)構(gòu)圖
4 履帶式行進(jìn)機(jī)構(gòu)的設(shè)計
該機(jī)構(gòu)通過電機(jī)驅(qū)動,在屋頂表面行進(jìn)。采用該機(jī)構(gòu)不需要對屋頂進(jìn)行大幅度的改造,即可完成對冰雪清除裝置的支撐;且可有效降低對屋面造成損害[7]。當(dāng)行程限位裝置接觸到屋脊兩邊擋板后,自動換向,實現(xiàn)往返除雪。如圖4所示。
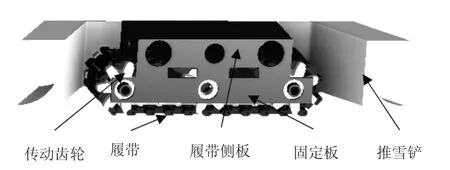
圖4 履帶式行走機(jī)構(gòu)
5 控制系統(tǒng)
該設(shè)計是基于單片機(jī)的控制系統(tǒng),整個系統(tǒng)由STM32F103RCT6單片機(jī)系統(tǒng)、雙絞龍式屋頂冰雪清除裝置機(jī)械裝置、積雪厚度感應(yīng)系統(tǒng)、顯示屏等組成。在雨雪天時,系統(tǒng)通電,當(dāng)積雪厚度達(dá)到預(yù)定值時,積雪感應(yīng)系統(tǒng)檢測到信號,傳遞給單片機(jī),裝置啟動,刮雪鏟將雪鏟起,絞龍將雪從屋頂送下;冰雪清除裝置沿屋面移動,當(dāng)傳動行程限位裝置接觸到屋脊兩邊擋板后,系統(tǒng)控制電機(jī)反轉(zhuǎn),冰雪清除裝置開始反向運動,從而達(dá)到往返運動除雪的目的;當(dāng)積雪厚度降到預(yù)定值以下時,裝置自動返回,處于待機(jī)狀態(tài)。按下停止運行按鈕即可停止裝置,見圖5。
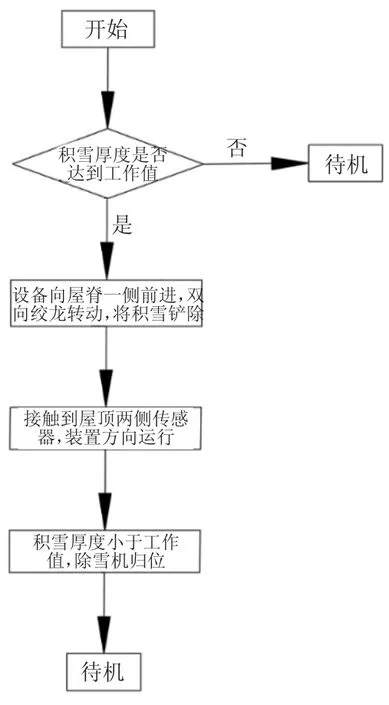
圖5 冰雪清除機(jī)工作流程圖
為了保證除雪安全,裝置整體運行平穩(wěn)可靠,系統(tǒng)軟件須設(shè)計保護(hù),以保證程序的可靠性,確保軟件錯誤率最小,且當(dāng)程序出錯時,仍能保證系統(tǒng)正常運行和安全退出。本文在控制系統(tǒng)程序可靠性方面主要考慮以下幾點:
1)當(dāng)冰雪清除裝置因障礙物阻擋無法移動或電機(jī)停止轉(zhuǎn)動時,系統(tǒng)自動切斷工作電源,發(fā)出警報,并將提示信息發(fā)送到用戶的顯示屏。
2)為了防止各種干擾造成的程序紊亂現(xiàn)象,在程序區(qū)的跳轉(zhuǎn)指令和返回指令之后,對于未使用的ROM區(qū)域設(shè)置軟件陷阱,當(dāng)程序進(jìn)入軟件陷阱后迫使它返回初始狀態(tài),讓系統(tǒng)盡快恢復(fù)運行。
3)確保系統(tǒng)有足夠的時間冗余。通電后,系統(tǒng)會先延時一段時間,然后初始化單片機(jī),確保系統(tǒng)最終復(fù)位到位。
6 結(jié)論
本文設(shè)計了主要由雙絞龍冰雪清除機(jī)構(gòu)、履帶式行走機(jī)構(gòu)、背負(fù)式機(jī)架、仿形刮雪鏟、傳動行程限位裝置和STM32F103RCT6單片機(jī)控制系統(tǒng)等組成的雙絞龍式屋頂冰雪清除裝置,采用STM32F103RCT6單片機(jī)控制系統(tǒng),實現(xiàn)了對該裝置的整體控制。同時運用電子信息控制系統(tǒng)技術(shù),以達(dá)到預(yù)期效果。
與現(xiàn)有的除冰雪方法相比,該裝置能自動清除屋頂表面的冰雪,自動化程度較高,可安裝于不同結(jié)構(gòu)的屋頂,且模塊化設(shè)計使該裝置具有便于拆卸與安裝、制造和運行成本低、適應(yīng)性廣等特點,適用于受暴雪干擾、屋頂積雪嚴(yán)重的地區(qū),能有效解決城市建筑和住宅屋頂冰雪清除困難、工作條件受限等問題,對促進(jìn)我國屋頂除冰雪機(jī)械的發(fā)展具有良好的應(yīng)用前景。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
