面向特定交通事故場(chǎng)景的ACC/ABS 協(xié)同控制策略
2021-10-17 19:22:44李俊凱關(guān)志偉趙洪林
關(guān)鍵詞:系統(tǒng)
杜 峰,李俊凱,關(guān)志偉,趙洪林
(1.天津職業(yè)技術(shù)師范大學(xué)汽車與交通學(xué)院,天津 300222;2.中山市技師學(xué)院,中山 548200;3.天津中德應(yīng)用技術(shù)大學(xué)汽車與軌道交通學(xué)院,天津 300350)
近年來,汽車向著智能化、網(wǎng)聯(lián)化方向發(fā)展,雖然發(fā)展迅速,但相關(guān)研究表明具備智能化、網(wǎng)聯(lián)化的汽車并不能在短時(shí)間內(nèi)推向市場(chǎng),需要一個(gè)長(zhǎng)時(shí)間的過渡期[1],而智能駕駛輔助系統(tǒng),將在這一過渡時(shí)期發(fā)揮巨大的功用。自動(dòng)巡航控制系統(tǒng)(adaptive cruise control,ACC)作為智能駕駛輔助系統(tǒng)的重要組成部分,在中高端配置車輛上得到了廣泛應(yīng)用。
研究表明,ACC 系統(tǒng)在減少駕駛員負(fù)擔(dān),提高駕駛安全性、舒適性方面發(fā)揮了巨大的功用[2],因此得到了學(xué)術(shù)界及車企的廣泛關(guān)注。文獻(xiàn)[3]考慮到駕駛員的多樣性復(fù)雜性,建立期望車距與自身車速相關(guān)的二次非線性期望車距模型,該模型相較于線性車距模型更加貼合駕駛員真實(shí)的跟車期望。文獻(xiàn)[4]給出了一種估計(jì)器方法,其思路是根據(jù)前車的歷史加速度信息,預(yù)測(cè)其未來車速的變化,并將其添加到基于MPC 理論的ACC 控制器中,利用多目標(biāo)優(yōu)化求解最優(yōu)的期望加速度,改進(jìn)車輛在峰值加速度及燃油消耗量上的性能。文獻(xiàn)[5]將車輛的縱向工況進(jìn)行劃分,依據(jù)不同的縱向工況,采取不同的間距控制策略來適應(yīng)駕駛員的風(fēng)格。文獻(xiàn)[6]構(gòu)建了新的人工勢(shì)場(chǎng)函數(shù),將本車前后方車輛看作2 個(gè)勢(shì)場(chǎng)中心,同時(shí)考慮前后方車輛的位置及速度,使車輛可以在擁堵的交通場(chǎng)景中自動(dòng)尋找最佳跟車距離,提高了車輛的通行效率及道路利用率。
目前大部分針對(duì)ACC 系統(tǒng)的研究多集中于提升車輛跟隨性能、降低ACC 系統(tǒng)工作過程中的燃油消耗以及提高乘客的舒適性[2]等方面,這些研究大多將道路交通環(huán)境設(shè)置為單一理想化環(huán)境,對(duì)設(shè)計(jì)的控制器在非理想化的環(huán)境下的適應(yīng)能力考慮較少。然而車輛在實(shí)際的道路中行駛時(shí),道路交通環(huán)境并不是理想的設(shè)定環(huán)境,而是處于不斷變化中。這些變化不僅包括交通參與者,也包括道路交通環(huán)境,如路面的狀態(tài)突然發(fā)生變化,由均一路面轉(zhuǎn)變?yōu)閷?duì)開路面等。
因此考慮道路交通場(chǎng)景突變情況下車輛ACC 系統(tǒng)的適應(yīng)能力,將ACC 系統(tǒng)與車輛的其他安全功能進(jìn)行集成或協(xié)同控制,對(duì)于提高車輛的行車安全是非常有必要的。如文獻(xiàn)[7]基于ABS/ASR/ACC 三者可共用傳感器及執(zhí)行機(jī)構(gòu)的考慮,開發(fā)了三者集成系統(tǒng)的車載實(shí)驗(yàn)平臺(tái),并設(shè)計(jì)了其內(nèi)部通信協(xié)議,但并未就三者的協(xié)同控制開發(fā)具體的控制算法。
本文則以與ACC 系統(tǒng)相關(guān)的典型交通事故為基礎(chǔ),提出一種ACC/ABS 協(xié)同控制策略并建模仿真,在道路交通環(huán)境突變的情境中驗(yàn)證ACC/ABS 協(xié)同控制策略的有效性。
1 交通事故場(chǎng)景構(gòu)建
交通事故是由人、車、路和環(huán)境4 個(gè)要素組成的系統(tǒng)失去平衡引起的[8]。分析這4 種因素可以發(fā)現(xiàn),在車輛行駛過程中路、環(huán)境這2 種因素屬于外部因素,因此并不能對(duì)其進(jìn)行控制[9];而當(dāng)ACC 系統(tǒng)工作時(shí),由ACC 控制器來控制車輛,駕駛員對(duì)車輛的影響較小;當(dāng)交通狀況突變時(shí),單一ACC 系統(tǒng)并不能完全應(yīng)對(duì)這種突變的交通狀況,而駕駛員可能來不及反應(yīng)進(jìn)而導(dǎo)致交通事故的發(fā)生[10]。而通過協(xié)同控制ACC/ABS 可有效提升車輛在此種情況下的安全性能。
相關(guān)文獻(xiàn)的統(tǒng)計(jì)資料表明:車輛因制動(dòng)因素導(dǎo)致的交通事故約占車輛原因?qū)е碌慕煌ㄊ鹿实?5%,并且其中50%以上是由于制動(dòng)側(cè)滑導(dǎo)致的[11]。分析典型的與ACC 系統(tǒng)相關(guān)的交通事故,可以將其分為2 類:一是因追尾導(dǎo)致的交通事故,二是因側(cè)滑導(dǎo)致的交通事故。前者是由于控制器的性能導(dǎo)致的,可通過控制器的優(yōu)化來解決;后者與車、路、環(huán)境多個(gè)因素相關(guān),而路、環(huán)境這2 個(gè)因素難以以較低成本來解決[12],因此通過協(xié)同控制車輛的功能系統(tǒng)來解決是更為合適的辦法。對(duì)后者的交通事故場(chǎng)景進(jìn)行分析,其主要特點(diǎn)為:本車需要較大的制動(dòng)減速度來保證安全車距;路面由均一路面變?yōu)閷?duì)開路面。
結(jié)合上述特點(diǎn),為驗(yàn)證控制器的性能,構(gòu)建典型交通場(chǎng)景如下:前方車輛緊急制動(dòng)或突遇非機(jī)動(dòng)車或行人橫穿馬路,同時(shí)路面由均一路面突變?yōu)閷?duì)開路面。
2 ACC/ABS 系統(tǒng)模型設(shè)計(jì)
2.1 ACC系統(tǒng)模型
2.1.1 上層控制器模型
ACC 系統(tǒng)根據(jù)本車與前車之間的運(yùn)動(dòng)學(xué)關(guān)系,控制本車以2 種模式運(yùn)行,分別為速度控制模式和間距控制模式,ACC 工作模式如圖1 所示。當(dāng)兩車的實(shí)時(shí)距離大于計(jì)算的安全距離時(shí),本車將進(jìn)入速度控制模式,利用駕駛員模型使車輛以設(shè)定的速度巡航行駛;當(dāng)兩車的實(shí)時(shí)距離小于安全距離時(shí),本車將進(jìn)行制動(dòng)以維持安全距離,保證行車安全。
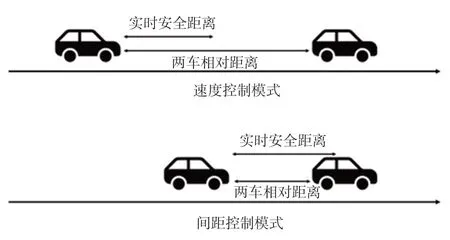
圖1 ACC 工作模式
設(shè)定期望安全距離為

式中:Ds為期望安全距離;Dd為設(shè)定的最小車輛安全距離;Tg為車輛時(shí)間距;Ve為本車實(shí)時(shí)車速。
間距控制模式下本車與前方目標(biāo)車輛的縱向運(yùn)動(dòng)學(xué)關(guān)系如圖2 所示。
考慮到制動(dòng)延遲,定義本車實(shí)際加速度ar與ap期望加速度之間的關(guān)系如下

式中:Ks為系統(tǒng)增益系數(shù);Tl為系統(tǒng)時(shí)間延時(shí)系數(shù);s 為L(zhǎng)aplace 算子。
設(shè)[DrVrap]T為狀態(tài)量,其中Dr為車載毫米波雷達(dá)實(shí)時(shí)檢測(cè)出來的兩車之間的距離,Vr為車載毫米波雷達(dá)采集到的本車與前方車輛的相對(duì)車速。設(shè)Dr為系統(tǒng)的輸出量,設(shè)置本車的期望加速度ap為控制量,則可建立系統(tǒng)的離散狀態(tài)方程為
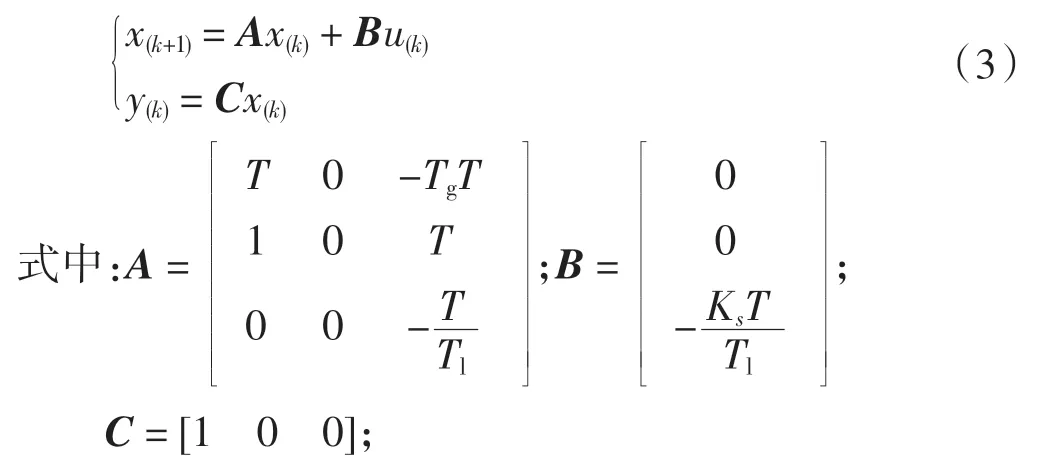
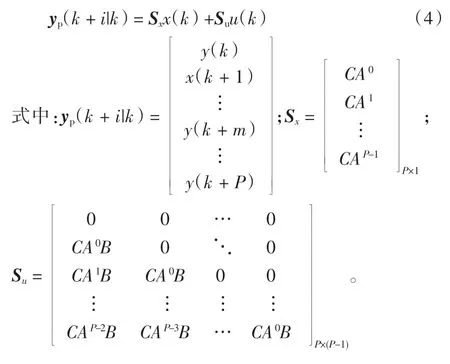
T 為采樣周期,對(duì)其進(jìn)一步處理可得系統(tǒng)的預(yù)測(cè)方程為
對(duì)于ACC 系統(tǒng)來說,車輛的安全性是首先需要考慮的,一般認(rèn)為當(dāng)兩車的實(shí)際距離大于實(shí)時(shí)的安全距離時(shí),可以視為安全的工況,但由于車輛的制動(dòng)系統(tǒng)在動(dòng)作時(shí)存在一定的延遲,在該時(shí)間內(nèi)車輛仍舊處于行駛狀態(tài),因此為了保證行車的安全,對(duì)車間距進(jìn)行如下的約束

考慮到車輛與路面的最大制動(dòng)力,設(shè)定期望加速度,即系統(tǒng)的控制量的范圍為

間距控制模式下的控制目標(biāo)是使本車與前車的安全距離接近于期望安全距離,即希望二者之間的差值越小越好,因此定義控制器的目標(biāo)函數(shù)為

2.1.2 下層控制器模型
PID(proportion integration differentiation)控制器具有響應(yīng)速度快,模型簡(jiǎn)單等優(yōu)點(diǎn)[13],因此選用PID 理論設(shè)計(jì)下層的執(zhí)行器。PID 控制器的原理是通過調(diào)整Kp、Ki、Kd三個(gè)參數(shù)來控制模型,使輸出值快速且穩(wěn)定響應(yīng)期望值。Kp與偏差的大小有關(guān),是偏差的倍數(shù),比例參數(shù)越大,比例的作用越明顯,積分參數(shù)Ki與偏差的變化率有關(guān),主要作用是為了防止超調(diào)。微分參數(shù)Kd是為了防止超調(diào)。
當(dāng)ACC 控制器根據(jù)傳感器及車輛狀態(tài)信息,計(jì)算得到的期望加速度大于0 時(shí),使用駕駛員模型來控制車輛運(yùn)動(dòng);當(dāng)期望加速度小于0 時(shí),選擇期望加速度與本車實(shí)際加速度的差值作為PID 控制器的輸入。車輪輪缸的制動(dòng)壓力作為PID 控制器的輸出,進(jìn)而控制車輛響應(yīng)期望加速度。
2.2 ABS系統(tǒng)模型
ABS 系統(tǒng)是目前主流的車載安全系統(tǒng),系統(tǒng)通過輪速傳感器監(jiān)測(cè)車輪的運(yùn)動(dòng)狀態(tài),通過相應(yīng)算法判斷車輪是否處于抱死狀態(tài),隨后調(diào)節(jié)制動(dòng)輪缸的制動(dòng)壓力,使車輪處于邊滾邊滑的狀態(tài),進(jìn)而防止出現(xiàn)車輪抱死失去轉(zhuǎn)向能力、車輛側(cè)滑等危險(xiǎn)狀況[14]。
3 ACC/ABS 協(xié)同控制策略
ACC 系統(tǒng)與ABS 系統(tǒng)協(xié)同控制的流程圖如圖3所示。
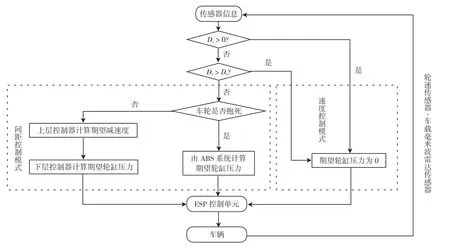
圖3 協(xié)同控制系統(tǒng)流程
傳感器信息進(jìn)入?yún)f(xié)同控制策略判斷模塊,首先將根據(jù)兩車的實(shí)時(shí)距離與實(shí)時(shí)計(jì)算的安全距離的關(guān)系,判斷進(jìn)入速度控制模式還是間距控制模式。若進(jìn)入速度控制模式,將由駕駛員模型控制車輛巡航行駛;若進(jìn)入間距控制模式,將根據(jù)輪速傳感器信息依據(jù)算法判斷車輪狀態(tài),若出現(xiàn)車輪抱死拖滑的狀態(tài),將由ABS 系統(tǒng)計(jì)算期望輪缸壓力,若車輪未抱死拖滑,ACC系統(tǒng)的上層控制器將根據(jù)當(dāng)前車輛信息及傳感器信息實(shí)時(shí)計(jì)算期望的車輛減速度,隨后利用下層控制器計(jì)算相應(yīng)期望減速度的期望輪缸壓力。最后將期望輪缸壓力傳遞至車輛的ESP 控制單元,由ESP 控制單元來控制各輪缸壓力使車輛達(dá)到期望減速度,同時(shí)保持車輛的安全行駛。
4 協(xié)同控制策略仿真驗(yàn)證
為驗(yàn)證控制效果,進(jìn)行Carsim 與Simulink 聯(lián)合仿真,在Carsim 中搭建第1 節(jié)所構(gòu)建的典型交通場(chǎng)景,在Simulink 中搭建協(xié)同控制模型。
4.1 仿真軟件環(huán)境設(shè)置
4.1.1 道路交通環(huán)境設(shè)置
為建立道路交通場(chǎng)景,在Carsim 中進(jìn)行如下交通場(chǎng)景設(shè)定:
(1)主車道為本車與前車所行駛的路面,如圖4所示。為滿足交通場(chǎng)景特點(diǎn)2,設(shè)定距本車起始位置100 m 處,路面由均一路面變化為對(duì)開路面,主車道路面附著系數(shù)如圖5 所示。設(shè)定前車速度變化如圖6所示。
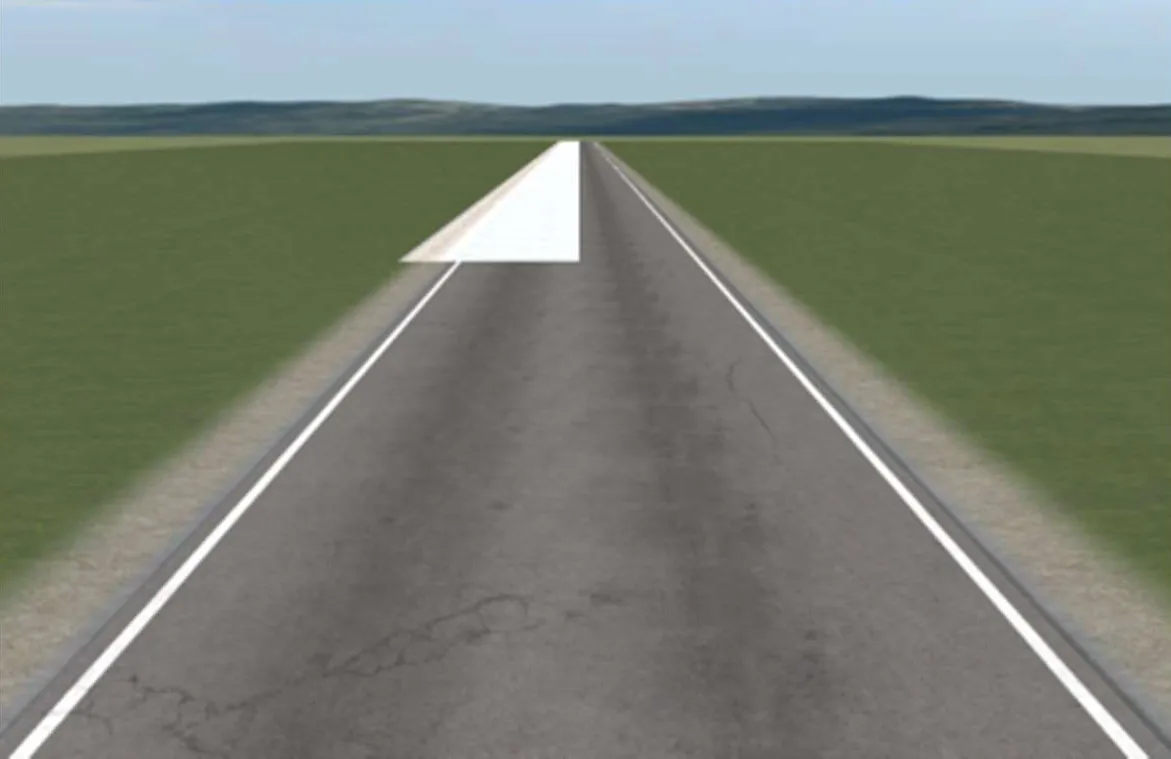
圖4 主車道
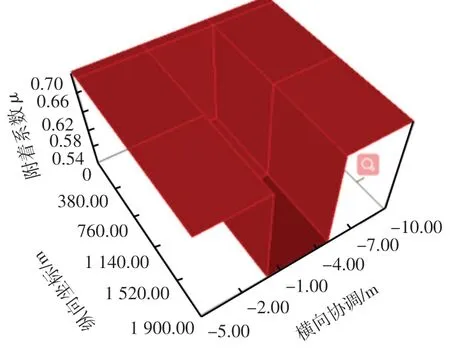
圖5 主車道路面附著系數(shù)
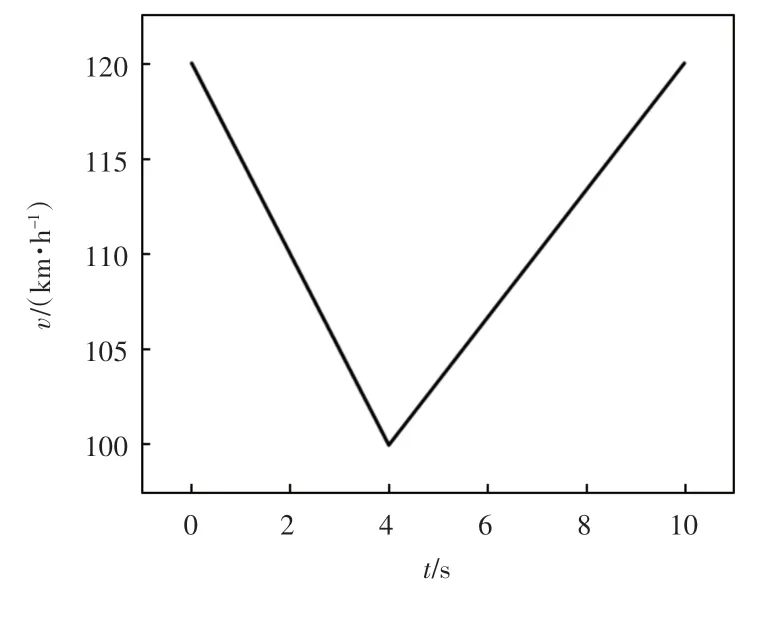
圖6 前車速度變化設(shè)定
(2)與主車道構(gòu)成交叉道路的為非機(jī)動(dòng)車行駛道路,為模擬非機(jī)動(dòng)車橫穿馬路的場(chǎng)景,以滿足交通場(chǎng)景特點(diǎn)1,設(shè)定其駛速度為6 m/s。
4.1.2 傳感器設(shè)置
本車采用毫米波雷達(dá)采集前方移動(dòng)物體信息,以某品牌傳感器的性能參數(shù)為參考,設(shè)定傳感器的主要參數(shù)為:探測(cè)距離100 m,探測(cè)角度-16°~16°。
4.1.3 控制器參數(shù)設(shè)置
以某實(shí)際車型的ACC 系統(tǒng)的相關(guān)性能參數(shù)為參考,設(shè)定ACC 系統(tǒng)的控制器參數(shù)分別為:設(shè)定時(shí)距1.4 s,默認(rèn)間距10 m,巡航車速120 km/h。
4.2 仿真結(jié)果分析
圖7 為毫米波雷達(dá)傳感器檢測(cè)到的距離本車最近的移動(dòng)物體與本車的實(shí)時(shí)距離以及實(shí)時(shí)計(jì)算的安全距離二者之間的對(duì)比圖。

圖7 實(shí)際距離與安全距離對(duì)比圖
當(dāng)實(shí)際距離大于安全距離時(shí),進(jìn)入速度控制模式,反之,進(jìn)入間隔控制模式。
圖8 為ACC 模式狀態(tài)選擇圖。

圖8 ACC 系統(tǒng)狀態(tài)模式
狀態(tài)值為1 時(shí)代表進(jìn)入間隔控制模式,狀態(tài)值為0 時(shí)代表進(jìn)入速度控制模式。依據(jù)本車與前方移動(dòng)物體之間的安全時(shí)距,可以判斷:
(1)在1.5 s 之前,由于兩車之間的實(shí)際距離小于安全距離,車輛進(jìn)入間隔控制模式。
(2)在1.5~4.5 s,本車與前車之間的實(shí)際距離大于安全距離,車輛進(jìn)入速度控制模式。
(3)在4.5~7 s,由于非機(jī)動(dòng)車橫穿馬路成為離本車最近的移動(dòng)物體,本車再次進(jìn)入間隔控制模式。
(4)在7 s 之后,非機(jī)動(dòng)車通過馬路,前方車輛成為距離本車最近的物體,兩車之間的實(shí)際距離大于安全距離,車輛進(jìn)入速度控制模式。
圖9 為兩控制器下車輛的質(zhì)心側(cè)偏角-側(cè)偏角速度的相軌跡對(duì)比圖。
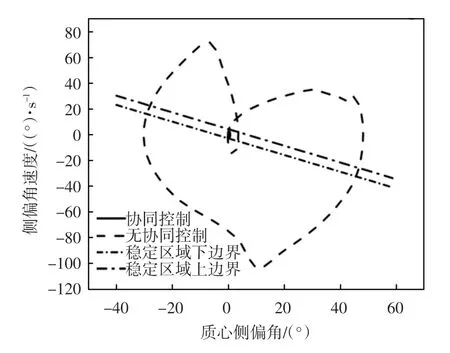
圖9 質(zhì)心側(cè)偏角-側(cè)偏角速度相軌跡
穩(wěn)定區(qū)域依據(jù)文獻(xiàn)[15]所提供的判定規(guī)則確定其內(nèi)部區(qū)域代表了車輛可穩(wěn)定行駛的軌跡范圍。可以發(fā)現(xiàn),協(xié)同控制的車輛其相軌跡位于穩(wěn)定區(qū)域邊界內(nèi),而無協(xié)同控制的車輛,即僅由單一ACC 系統(tǒng)控制的車輛其相軌跡則遠(yuǎn)遠(yuǎn)超出了2 條邊界線。
在兩控制器分別作用下車輛的行駛軌跡對(duì)比圖如圖10 所示。
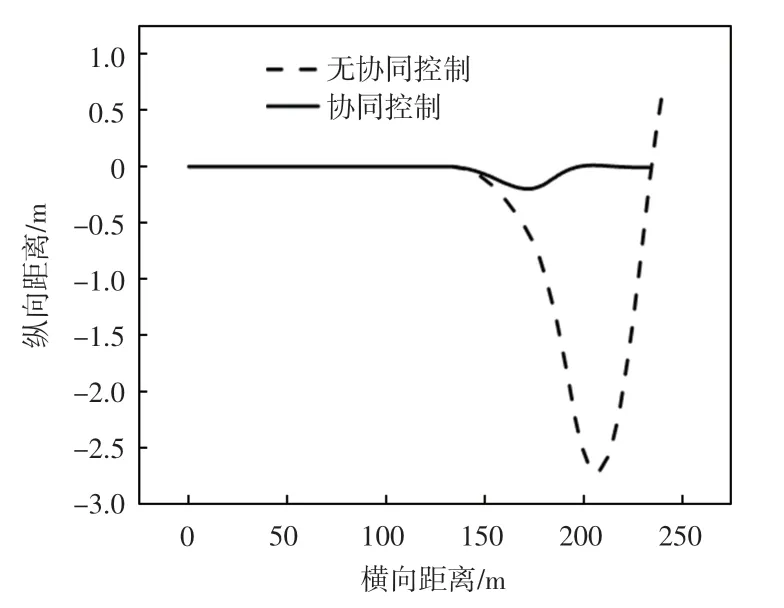
圖10 車輛質(zhì)心行駛軌跡
協(xié)同控制下的車輛其側(cè)向偏差最大值為0.19 m,無協(xié)同控制的車輛的側(cè)向偏差最大值為2.8 m,采用文獻(xiàn)[11]所提供的計(jì)算實(shí)際路徑與期望路徑之間的均方根誤差的方法,協(xié)同控制下的均方根誤差為0.067 8,無協(xié)同控制器下的均方根誤差為1.060 6。
圖11 為在該輪缸壓力下各車輪速度的變化情況。圖12 為在該壓力下各車輪速度的變化情況。
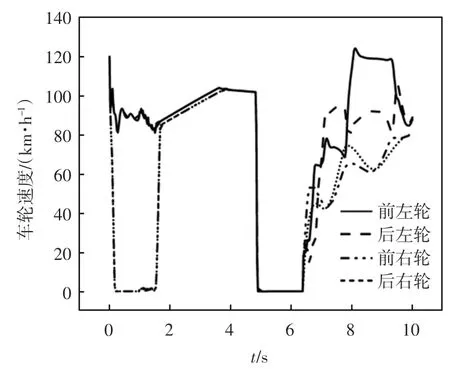
圖11 無協(xié)同控制車輪速度變化情況
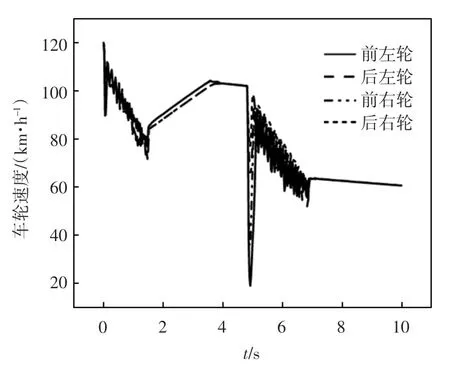
圖12 協(xié)同控制車輪輪速變化情況
從圖11 可以發(fā)現(xiàn),在第5 s 左右,由于車輪抱死拖滑,車輪出現(xiàn)側(cè)滑的危險(xiǎn)狀況。
從圖12 可以發(fā)現(xiàn),當(dāng)車輛需要緊急制動(dòng)時(shí),協(xié)同控制策略將控制ABS 系統(tǒng)介入工作,在響應(yīng)期望減速度的同時(shí)防止車輪抱死以保證行車安全。
5 結(jié)語
本文基于典型的交通事故場(chǎng)景,搭建ACC 與ABS的協(xié)同控制策略模型來控制車輛在道路交通環(huán)境突變情況下的巡航行駛安全。通過Carsim 和Simulink聯(lián)合仿真驗(yàn)證協(xié)同控制下的車輛在應(yīng)對(duì)道路交通環(huán)境突變時(shí),具有更高的適應(yīng)能力,且能夠有效防止車輛側(cè)滑等危險(xiǎn)工況的出現(xiàn),避免了單一ACC 系統(tǒng)應(yīng)對(duì)交通環(huán)境突變等緊急情況的不足,進(jìn)一步提高了車輛駕駛輔助系統(tǒng)的安全功能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32