基于ROS的智能移動靶設計與實現
2021-10-19 01:41:29徐濤馮鵬程晁國勝
現代信息科技 2021年6期
徐濤 馮鵬程 晁國勝
摘 ?要:針對目前警用或軍用輕武器射擊訓練中缺少智能移動靶的現狀,結合實戰化需求確定載運平臺、靶標和整體系統的技戰術指標;基于機器人操作系統,以機械設計思路設計了移動靶的升降和起倒功能;以系統控制設計思路設計了遠程控制和智能控制功能。通過基于光固化的3D打印進行模型制作,驗證了設計可行性。為輕武器射擊實戰化訓練裝備的研發提供了新的思路和方法參考。
關鍵詞:機器人操作系統;智能移動靶;3D打印;實戰化訓練
中圖分類號:TP242 ? ? 文獻標識碼:A 文章編號:2096-4706(2021)06-0001-05
Design and Implementation of Intelligent Moving Target Based on ROS
XU Tao1,FENG Pengcheng1,CHAO Guosheng2
(1.Logistics University of Peoples Armed Police Force,Tianjin ?300309,China;
2.Luohe Branch Henan Corps of PAP,Luohe ?462001,China)
Abstract:Aiming at the current situation of lack of intelligent moving targets in the shooting training of police or military light weapons at present,combined with the actual combat requirements,the technical and tactical indicators of the carrier platform,target and the overall system are determined. Based on the robot operating system,the lifting and falling functions of the moving target are designed according to the mechanical design idea. The functions of remote control and intelligent control are designed according to the system control design idea. The feasibility of the design is verified by the model making of 3D printing based on photocuring. It provides a new idea and method reference for the research and development of actual combat training equipments for light arms shooting.
Keywords:ROS;intelligent moving target;3D printing;actual combat training
0 ?引 ?言
智能化、網聯化載運工具方興未艾,在軍事領域的應用也逐漸深入。在以重武器為主要作戰裝備的部隊中,訓練可以使用例如無人靶機、無人靶車和無人靶船等裝備作為打擊目標,實戰能力得以大幅提高。但是以輕武器為主要作戰裝備的部隊,在射擊訓練中缺少無人智能化射擊靶。尤其是近年來,部隊對于反恐和巷戰訓練需求增多,“絕對快、相對準”的射擊理念逐漸深入,對仿人運動靶的需求增大。本題選擇設計一款智能網聯的實戰化移動靶,將智能技術融入射擊靶,使其能夠模擬真人運動特點,有效鍛煉射擊人員的快速反應能力,提升實戰化訓練水平,提高部隊戰斗力。
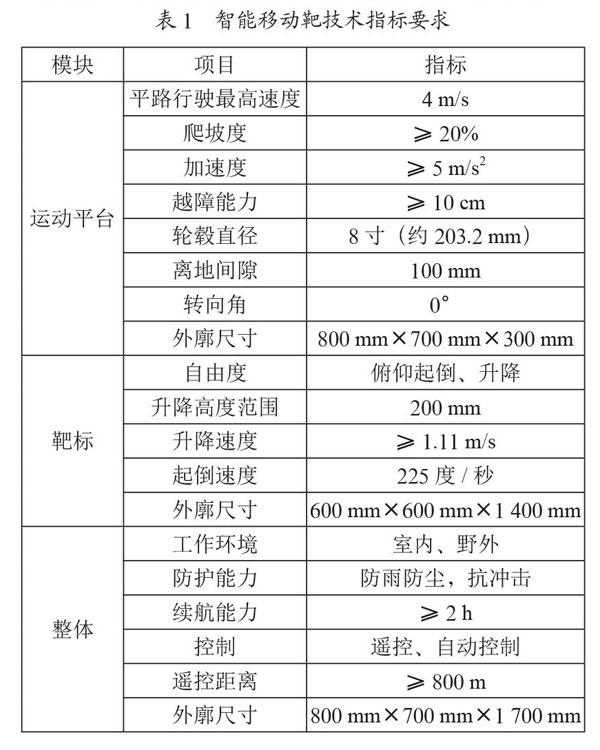
1 ?移動靶戰(技)指標需求
在軍事領域,機動主要指兵力或武器裝備轉移至目標地域;對通用車輛,機動性主要指車輛在最小面積內轉彎、轉向和掉頭的能力。本文借鑒軍事領域機動性的主要影響因素,綜合車輛的動力性、操作性和通過性指標,提出智能移動靶機動性能指標需求分析,主要包括最高速度、加速能力、轉向能力和越障能力等性能指標。
智能移動靶需要具有以下能力:(1)運動平臺擁有良好的機動性能;(2)靶標能夠起倒、升降;(3)具有遙控和一定的無人駕駛能力。智能移動靶指標需求匯總如表1所示。
2 ?移動靶車設計
2.1 ?機械系統設計
2.1.1 ?運動機構
移動、變速、轉向功能為智能移動靶的運動功能,主要包括輪式、履帶式、腿式。每種方式都有各自的特點,適合不同設備需求和應用場景。各個方式的優缺點如表2所示[1]。
雖然本課題是設計一款仿人運動的智能移動靶,但是由于腿式移動機構結構復雜,技術門檻高,成本較高,所以放棄腿式機構。又根據需求選擇電力驅動,履帶式結構耗能較高,電力續航時間短,所以最終選擇技術條件成熟,運行穩定的輪式移動機構。為提升輪式運動機構的越障能力和機動性能,智能移動靶選擇四輪差分驅動,每個輪均有驅動電機。為使其具有人體原地轉向能力,選擇差速轉向,即轉向角為0°。
運動機構是模仿人體行走或跑步的機構,是智能移動靶中控制運動的部分,包括底盤部分和運動控制箱部分。底盤部分主要功能是輸出動力,驅動整個系統運動;運動控制箱部分功能主要是連接、支承和防護:連接底盤和上部升降起倒機構,支承整個系統并為其提供一定的防護,如圖1所示。
2.1.2 ?起倒機構
升降、起倒為靶標機構的執行功能,為簡化設計,本課題將升降功能整合到市場上現有比較成熟的起倒靶機上。起倒機構設計的主要在于傳動,傳動方式主要有螺旋傳動、摩擦傳動、帶傳動、鏈傳動和齒輪傳動等方式。各種傳動方式的特點總結如表3所示。起倒機構所處空間較小,并且要求傳動穩定,正反轉向順暢,因此選用齒輪式傳動。
起倒機構是實現靶標(靶面+靶桿)俯仰起倒的機構。機械傳動式起倒靶需要電機產生動力,傳動部分傳遞或轉化動力,起倒桿輸出起倒轉矩。起倒機構整體效果如圖2所示。
2.1.3 ?升降機構
升降機構有剪式升降、鏈條式升降、絲杠式升降、鋼絲繩式升降等四種[2],各種升降的優缺點對比如表4所示[3]。根據需求分析,靶標在約1 s內完成一個升降周期,即1 s內20 cm升降,對升降機構的速度要求較高,并且起倒靶空間有限,因此選用齒輪齒條式升降機構。
升降機構是通過鏈傳動使靶面上下運動,達到模仿人體在運動過程中重心起伏目的的機構。升降功能的實現是在靶桿部分進行改造,將小型鏈輪和鏈條整合至靶面兩側的靶桿內,通過底部電機驅動鏈輪帶動靶面升降運動。通過SolidWorks進行3D建模,升降機構整體概念圖如圖3所示。
2.1.4 ?智能移動靶整體效果
綜上設計分析,智能移動靶整體效果如圖4所示。需要注意的是此為初步設計方案,后續在控制部分設計、樣車試制和功能測試過程中發現不合理之處需要隨時進行調整。
2.2 ?ROS控制系統設計
機器人操作系統(Robot Operating System,ROS)是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞以及數據包管理。它也提供用于獲取、編譯、編寫和跨計算機運行代碼所需的工具和庫函數,相當于一種“機器人框架”[4]。智能移動靶的操作系統安裝在機載樹莓派上,樹莓派是一種使用ARM架構的Linux系統的卡片式電腦。選用STM32單片機作為驅動板驅動電機、雷達、遙控等功能模塊。
2.2.1 ?遠程控制設計
目前比較成熟的遠程控制技術主要有2.4 GHz無線電波、LTE、無線射頻、紅外技術。2.4 GHz無線電波在遙控領域應用比較廣泛,藍牙、Wi-Fi均是基于2.4 GHz,只是協議不同。由于智能移動靶遙控距離不小于800米,響應速度要快,而且需要具有集群控制能力。根據綜合對比分析,基于2.4 GHz的遙控技術可以不依賴網絡且遙控距離較遠,適合智能移動靶使用。基于2.4 GHz的航模遙控器由于其遙控距離較遠,成本較低,并且技術比較成熟,市場反應較好。智能移動靶選用的遙控器和接收機分別為航模Micrzone MC6C型和MC7RB型。
Micrzone MC7RB接收機具有6通道PWM信號和SUBS信號,能滿足軍用智能移動靶的控制需要。對應遙控器通道如圖5所示,A左右搖桿是1通道,上下方向是2通道;B搖桿上下方向是2通道,左右方向是4通道;C開關為5通道;D開關為6通道;其余按鈕和微調開關暫時不做應用,留作后續功能開發。接收機通過杜邦線與樹莓派預留拓展GPIO口連接,由樹莓派接收并處理遙控信息。
2.2.2 ?SLAM智能駕駛
SLAM(Simultaneous Localization and Mapping)算法,即同時定位與地圖構建,目前被廣泛應用于機器人領域。SLAM是指機器人在未知的環境中通過自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器或者視覺傳感器)來對自身進行定位,并在定位的基礎上利用外部傳感器獲取的環境信息增量式的構建環境地圖,實現機器人的自主定位和導航[5],如圖6所示。
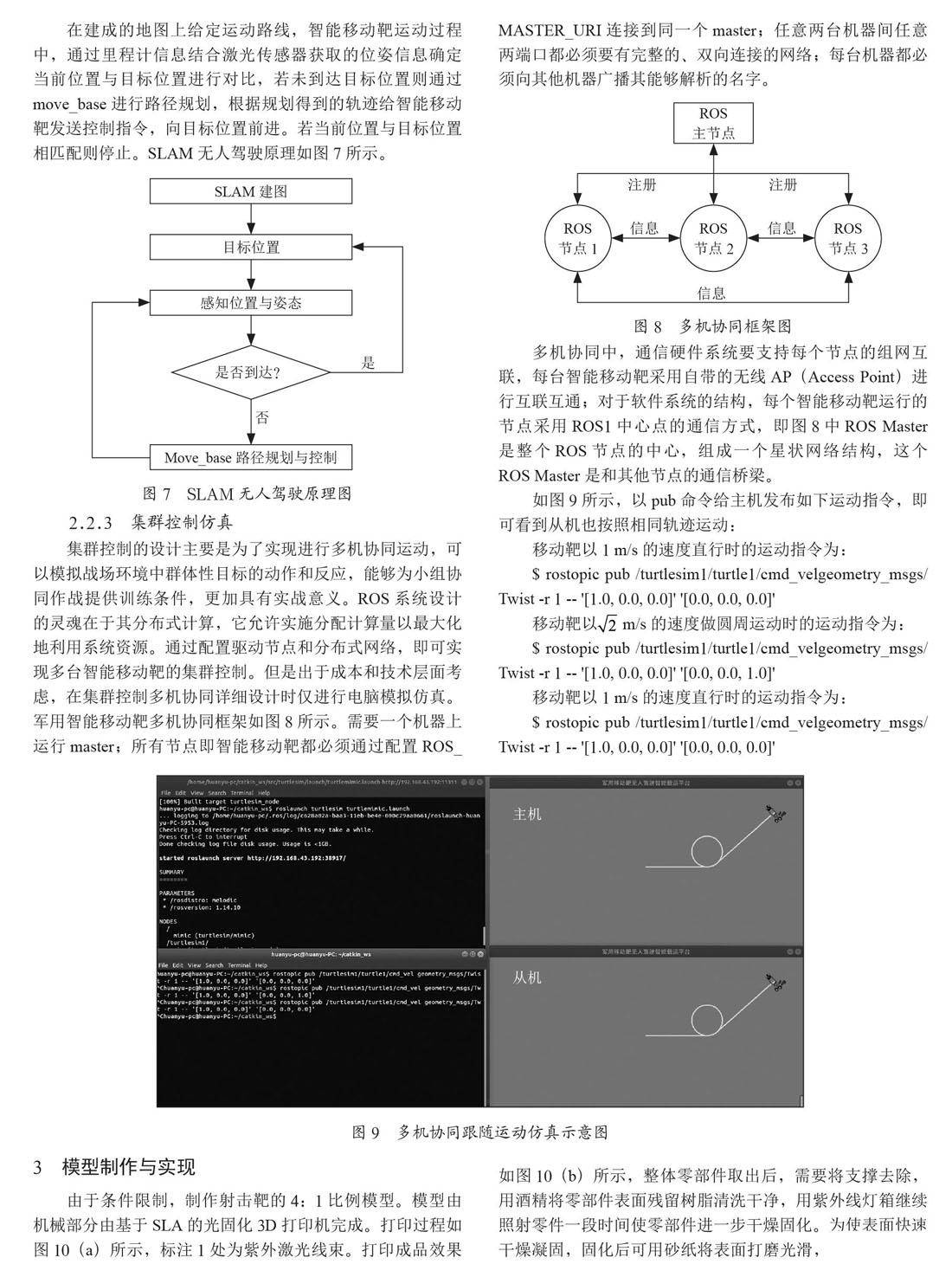
在建成的地圖上給定運動路線,智能移動靶運動過程中,通過里程計信息結合激光傳感器獲取的位姿信息確定當前位置與目標位置進行對比,若未到達目標位置則通過move_base進行路徑規劃,根據規劃得到的軌跡給智能移動靶發送控制指令,向目標位置前進。若當前位置與目標位置相匹配則停止。SLAM無人駕駛原理如圖7所示。
2.2.3 ?集群控制仿真
集群控制的設計主要是為了實現進行多機協同運動,可以模擬戰場環境中群體性目標的動作和反應,能夠為小組協同作戰提供訓練條件,更加具有實戰意義。ROS系統設計的靈魂在于其分布式計算,它允許實施分配計算量以最大化地利用系統資源。通過配置驅動節點和分布式網絡,即可實現多臺智能移動靶的集群控制。但是出于成本和技術層面考慮,在集群控制多機協同詳細設計時僅進行電腦模擬仿真。軍用智能移動靶多機協同框架如圖8所示。需要一個機器上運行master;所有節點即智能移動靶都必須通過配置ROS_MASTER_URI連接到同一個master;任意兩臺機器間任意兩端口都必須要有完整的、雙向連接的網絡;每臺機器都必須向其他機器廣播其能夠解析的名字。
多機協同中,通信硬件系統要支持每個節點的組網互聯,每臺智能移動靶采用自帶的無線AP(Access Point)進行互聯互通;對于軟件系統的結構,每個智能移動靶運行的節點采用ROS1中心點的通信方式,即圖8中ROS Master是整個ROS節點的中心,組成一個星狀網絡結構,這個ROS Master是和其他節點的通信橋梁。
如圖9所示,以pub命令給主機發布如下運動指令,即可看到從機也按照相同軌跡運動:
移動靶以1 m/s的速度直行時的運動指令為:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
移動靶以 m/s的速度做圓周運動時的運動指令為:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.0]'
移動靶以1 m/s的速度直行時的運動指令為:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
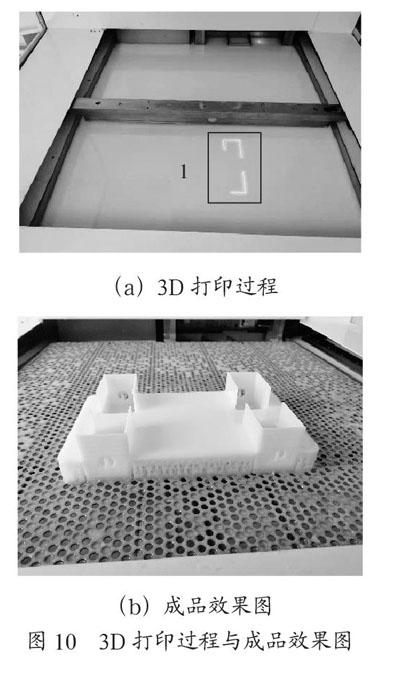
3 ?模型制作與實現
由于條件限制,制作射擊靶的4:1比例模型。模型由機械部分由基于SLA的光固化3D打印機完成。打印過程如圖10(a)所示,標注1處為紫外激光線束。打印成品效果如圖10(b)所示,整體零部件取出后,需要將支撐去除,用酒精將零部件表面殘留樹脂清洗干凈,用紫外線燈箱繼續照射零件一段時間使零部件進一步干燥固化。為使表面快速干燥凝固,固化后可用砂紙將表面打磨光滑,砂紙要求600目以上。打磨后可根據需求對表面顏色進行噴涂,軍用智能移動靶樣機選涂荒漠迷彩噴漆。
4 ?結 ?論
本文針對軍警輕武器射擊訓練中缺少智能移動靶的現實情況,以實戰化戰技指標為依據,基于機器人操作系統,從運動機構、起倒機構和升降機構三個方面設計了智能移動靶的機械系統,從遠程控制、SLAM自動駕駛和集群控制仿真三個方面設計了智能移動靶的控制系統,最后通過3D打印制作比例模型驗證了設計的可行性。將機器人操作系統融入射擊靶,使其能夠模擬實戰環境中真人運動特點,有效鍛煉射擊人員的快速反應能力,提升實戰化訓練水平。
參考文獻:
[1] 董瑩.六輪足復合式移動機器人的設計與研究 [D].北京:北京交通大學,2017.
[2] 杜干.升降平臺升降機構研究現狀分析 [J].機械工程與自動化,2013(2):205-207.
[3] 張亞軍.可如廁智能輪椅擔架車設計與研究 [D].秦皇島:燕山大學,2018.
[4] 張鵬.基于ROS的全向移動機器人系統設計與實現 [D].合肥:中國科學技術大學,2017.
[5] 陳衛東,張飛.移動機器人的同步自定位與地圖創建研究進展 [J].控制理論與應用,2005(3):455-460.
作者簡介:徐濤(1994.02—),男,漢族,天津人,碩士研究生在讀,研究方向:載運工具運用工程。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17