KingMap RS平臺中影像配準和鑲嵌技術研究
2021-10-19 13:28:34王向春
現代信息科技 2021年6期
摘 ?要:KingMap RS平臺是一款具有中國自主知識產權的軟件平臺,專門用于制作遙感影像地圖。影像配準和影像鑲嵌是遙感影像地圖制作中的核心技術。影像配準分為影像特征提取、影像特征匹配、變換模型選取及求取參數、統一坐標系等步驟;影像鑲嵌包括拼接線的確定、影像色彩處理、重疊區亮度確定等環節。隨著KingMap地理信息系統的3D建模、編輯和分析能力的快速提升,遙感與GIS一體化的價值將會更加凸顯。
關鍵詞:KingMap;遙感;影像配準;影像鑲嵌
中圖分類號:TP311;TP751 ? ? 文獻標識碼:A 文章編號:2096-4706(2021)06-0112-03
Research on Image Registration and Mosaic Technology in KingMap RS Platform
WANG Xiangchun
(Xiamen Kingtop Information Technology Co.,Ltd.,Xiamen ?361008,China)
Abstract:KingMap RS platform is a software platform with Chinas independent intellectual property rights,which is specially used for making remote sensing image maps. Image registration and image mosaic are the core technologies in the remote sensing image map making. Image registration is divided into image feature extraction,image feature matching,transformation model selection and parameters getting,unified coordinate and other steps;image mosaic includes the determination of splicing line,image color processing,overlapping area brightness determination and so on. With the rapid improvement of 3D modeling,editing and analysis ability of KingMap geographic information system,the value of integration of remote sensing and GIS will be more prominent.
Keywords:KingMap;remote sensing;image registration;image mosaic
0 ?引 ?言
GIS平臺軟件是地理信息產業的技術核心,是技術創新和產業發展的制高點,是數字城市、智慧城市和眾多電子政務建設的重要基礎性軟件,也是國家地理信息安全的保障。基于GIS平臺融合多種技術,是建設智慧城市的有效途徑也是未來趨勢。所以只有走差異化發展道路,擁有自己的GIS開發平臺,才能保持競爭優勢。KingMap地理信息系統開發平臺是精圖公司研發的具有中國自主知識產權的GIS軟件平臺,其中的KingMap RS版專門用作制作遙感影像地圖。
在遙感影像地圖制作涉及的多項技術中,影像配準技術和影像鑲嵌技術是核心關鍵技術。不同遙感影像數據獲取載體(遙感衛星、航空飛機等)、不同時間段、不同視角獲取的同一目標物的影像,依據一些相似性度量對坐標系進行統一,在像素層上獲得最佳匹配的過程,就是影像配準[1]。將相同或不同攝影條件下獲取的兩幅或多幅遙感影像,拼接成完整的全新的影像圖的技術過程,就是影像鑲嵌。
1 ?影像配準
影像的配準分為四個步驟,依次為影像特征提取、影像特征匹配、變換模型選取及求取參數、統一坐標系。
1.1 ?影像特征提取
影像的特征主要分為點、線、面三類,其中點特征是最采常用的影像特征,目標物的邊緣點、線交叉點、角點等都屬于點特征。目標物的輪廓線、河流道路的邊緣線等具有明顯的線性特征,均屬于影像特征中的線特征。線特征的提取步驟包含兩個環節,第一個是粗略提取出影像中具備明顯線段信息的各類邊緣線、輪廓線等;第二個環節是通過設定限制條件,篩選出滿足條件的線段,作為最終提取的線特征。影像中明顯的區域性信息可以作為面特征,在實際的應用中可以將不規則區域的重心或者圓形區域的圓心作為面特征來利用[2]。
影像特征提取的前提是找到對影像變化參數穩定并可進行描述的特征。影像的變化參數包括光照條件、視角變化、仿射變換、尺度縮放、旋轉等,在影像變化因素下能夠保持不變性的特征,屬于穩定性良好的特征[3]。KingMap RS平臺在處理兩幅差異性較大的影像的匹配時,通過自動化特征提取技術,在目標物運動、遮擋、噪聲等因素影響下依然具備良好的特征匹配性。
1.2 ?特征匹配
特征匹配的首要工作是找到兩幅遙感影像中的共軛參數,建立對應關系。假設兩幅影像A和B中,分別有m和n個特征點,其中有k對點是影像A和B中均有的特點,那么用數學語言找出k對點的過程,就是特征匹配[4]。
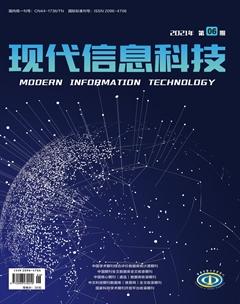
特征匹配在提取出對旋轉、縮放、亮度無關的特征向量后進行,采用向量間的歐幾里得距離作為相似性度量。再使用SIFT算法進行特征匹配,在不同的尺度空間鎖定特征點及其方向。其實質可表述如圖1所示。
1.3 ?選取變換模型及求取參數
待配準影像與參考影像之間通常存在幾何畸變,對于不同的幾何畸變情況可以擬合兩幅影像之間的變化差異,再選用最佳的數學模型。目前常用的變換模型有仿射變換和多項式變換,其他的還有投射變換、投影變換等多種模型[5]。
仿射變換模型具備良好的數學特性,是一種剛性變換。仿射變換共涉及四項參數,分別是尺度因子s、旋轉角q、x方向的平移量tx、y方向的平移量ty。
將影像A中的點(xA,yA)映射為影像B中的點(xB,yB)的數學式為:
多項式變換是影像間存在非線變形時最常用的變換模型,如遙感影像中存在由緩和的地形起伏引起的變形,就可以采用多項式變換模型校正,將影像A中的點(xA,yA)映射為映像B中的點(xB,yB),數學式為:
兩幅影像之間存在的最佳變換參數,通常采用求取最小均方誤差法的方式來獲取。
1.4 ?統一坐標系
在計算出兩幅影像之間的最佳變換參數后,將輸入影像做相應的參數變換,使輸入影像與參考影像處于同一坐標系下。輸入影像在坐標變換后所得的點坐標不是整像素數時,還需要進行差值處理。經常采用的方法有雙線性插值法、最鄰近域法和雙三次卷積法。
經過校正的輸入影像,與參考影像一起用作后續的目標變化檢測、影像融合和影像鑲嵌。
2 ?影像鑲嵌
為了減輕后續的色調調整工作,在鑲嵌時盡量選擇成像條件和成像時間接近的遙感影像。首先對影像進行預處理,通常使用幾何校正、輻射校正、去條帶和斑點等方式。在定好標準影像像幅和鑲嵌順序后,確定好拼接線[6]。
2.1 ?拼接線的確定
若多個待鑲嵌影像邊緣區域交錯形成重疊區,則在重疊區內找出一條線(通常是曲線),線兩側的亮度變化達到最不顯著時,就認為找到了待鑲嵌影像的拼接線。
假設影像A和B的重疊區的寬度為L,取長度為d的一維窗口,讓窗口在一行內逐點滑動,計算出兩幅影像在窗口內各個對應像元點的亮度值絕對差的和,最小的即為拼接線在這一行的位置,其計算公式為:
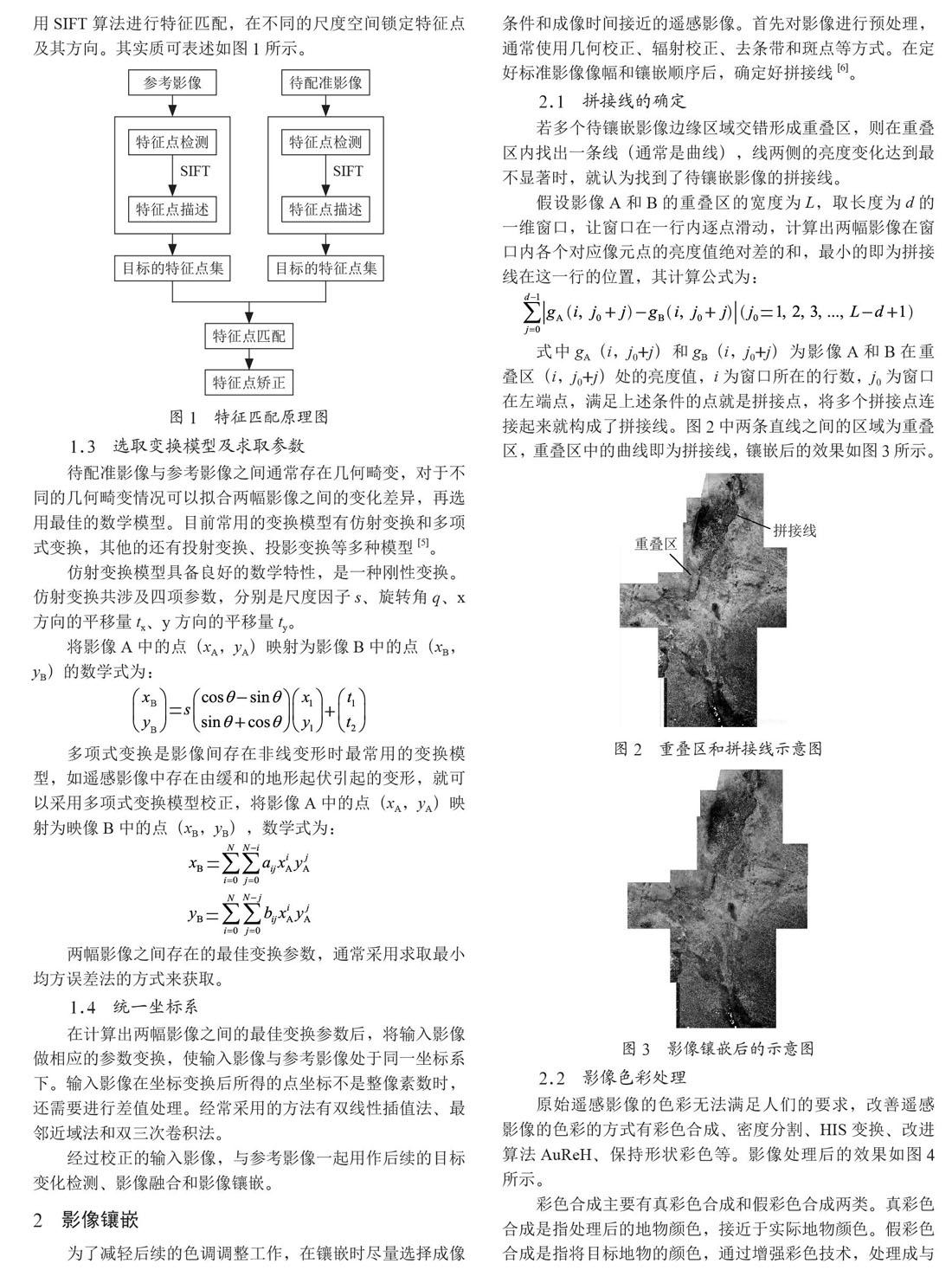
式中gA(i,j0+j)和gB(i,j0+j)為影像A和B在重疊區(i,j0+j)處的亮度值,i為窗口所在的行數,j0為窗口在左端點,滿足上述條件的點就是拼接點,將多個拼接點連接起來就構成了拼接線。圖2中兩條直線之間的區域為重疊區,重疊區中的曲線即為拼接線,鑲嵌后的效果如圖3所示。
2.2 ?影像色彩處理
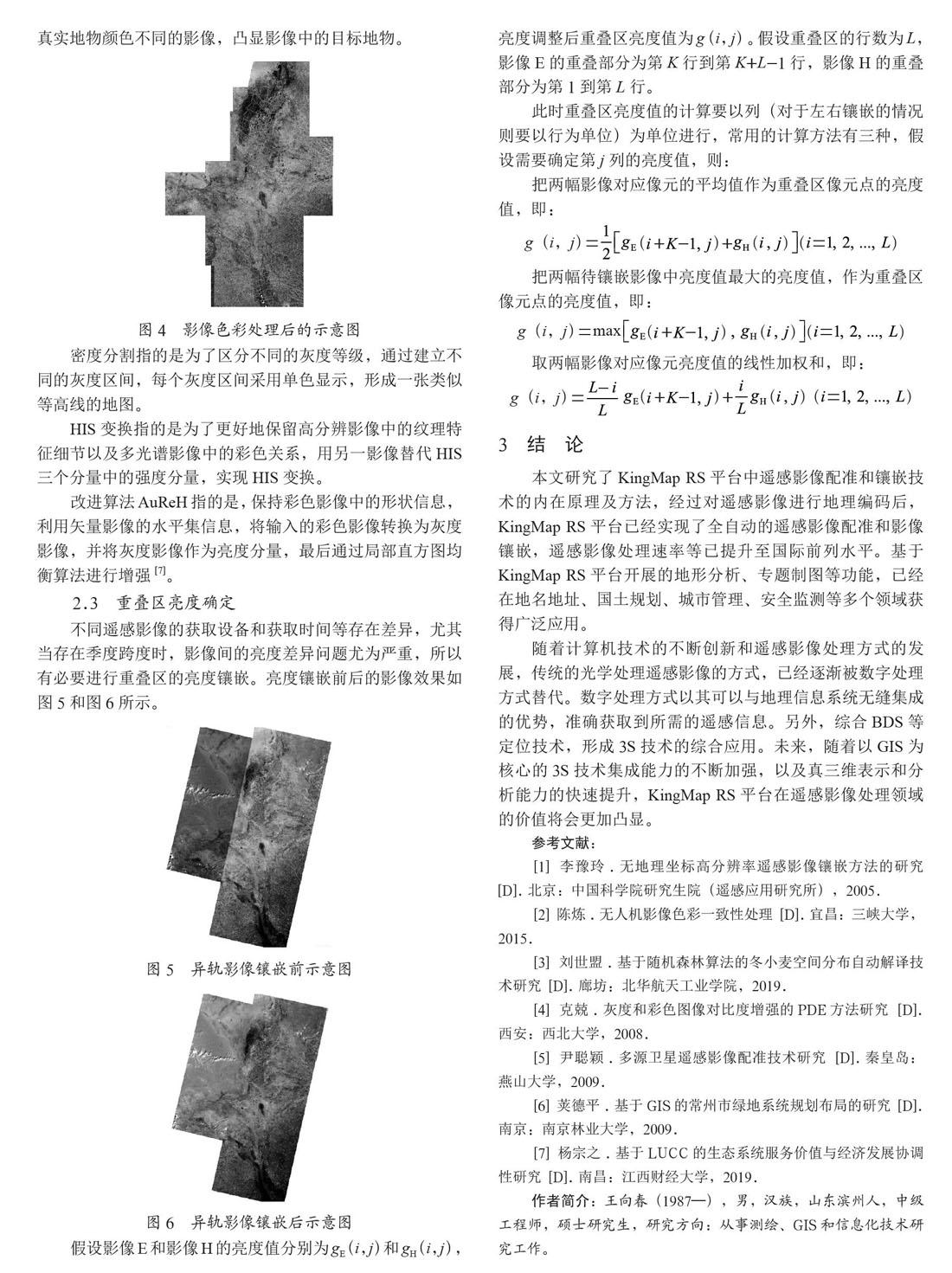
原始遙感影像的色彩無法滿足人們的要求,改善遙感影像的色彩的方式有彩色合成、密度分割、HIS變換、改進算法AuReH、保持形狀彩色等。影像處理后的效果如圖4所示。
彩色合成主要有真彩色合成和假彩色合成兩類。真彩色合成是指處理后的地物顏色,接近于實際地物顏色。假彩色合成是指將目標地物的顏色,通過增強彩色技術,處理成與真實地物顏色不同的影像,凸顯影像中的目標地物。
圖4 ?影像色彩處理后的示意圖
密度分割指的是為了區分不同的灰度等級,通過建立不同的灰度區間,每個灰度區間采用單色顯示,形成一張類似等高線的地圖。
HIS變換指的是為了更好地保留高分辨影像中的紋理特征細節以及多光譜影像中的彩色關系,用另一影像替代HIS三個分量中的強度分量,實現HIS變換。
改進算法AuReH指的是,保持彩色影像中的形狀信息,利用矢量影像的水平集信息,將輸入的彩色影像轉換為灰度影像,并將灰度影像作為亮度分量,最后通過局部直方圖均衡算法進行增強[7]。
2.3 ?重疊區亮度確定
不同遙感影像的獲取設備和獲取時間等存在差異,尤其當存在季度跨度時,影像間的亮度差異問題尤為嚴重,所以有必要進行重疊區的亮度鑲嵌。亮度鑲嵌前后的影像效果如圖5和圖6所示。
假設影像E和影像H的亮度值分別為gE(i,j)和gH(i,j),亮度調整后重疊區亮度值為g(i,j)。假設重疊區的行數為L,影像E的重疊部分為第K行到第K+L-1行,影像H的重疊部分為第1到第L行。
此時重疊區亮度值的計算要以列(對于左右鑲嵌的情況則要以行為單位)為單位進行,常用的計算方法有三種,假設需要確定第j列的亮度值,則:
把兩幅影像對應像元的平均值作為重疊區像元點的亮度值,即:
把兩幅待鑲嵌影像中亮度值最大的亮度值,作為重疊區像元點的亮度值,即:
取兩幅影像對應像元亮度值的線性加權和,即:
3 ?結 ?論
本文研究了KingMap RS平臺中遙感影像配準和鑲嵌技術的內在原理及方法,經過對遙感影像進行地理編碼后,KingMap RS平臺已經實現了全自動的遙感影像配準和影像鑲嵌,遙感影像處理速率等已提升至國際前列水平。基于KingMap RS平臺開展的地形分析、專題制圖等功能,已經在地名地址、國土規劃、城市管理、安全監測等多個領域獲得廣泛應用。
隨著計算機技術的不斷創新和遙感影像處理方式的發展,傳統的光學處理遙感影像的方式,已經逐漸被數字處理方式替代。數字處理方式以其可以與地理信息系統無縫集成的優勢,準確獲取到所需的遙感信息。另外,綜合BDS等定位技術,形成3S技術的綜合應用。未來,隨著以GIS為核心的3S技術集成能力的不斷加強,以及真三維表示和分析能力的快速提升,KingMap RS平臺在遙感影像處理領域的價值將會更加凸顯。
參考文獻:
[1] 李豫玲.無地理坐標高分辨率遙感影像鑲嵌方法的研究 [D].北京:中國科學院研究生院(遙感應用研究所),2005.
[2] 陳煉.無人機影像色彩一致性處理 [D].宜昌:三峽大學,2015.
[3] 劉世盟.基于隨機森林算法的冬小麥空間分布自動解譯技術研究 [D].廊坊:北華航天工業學院,2019.
[4] 克兢.灰度和彩色圖像對比度增強的PDE方法研究 [D].西安:西北大學,2008.
[5] 尹聰穎.多源衛星遙感影像配準技術研究 [D].秦皇島:燕山大學,2009.
[6] 莢德平.基于GIS的常州市綠地系統規劃布局的研究 [D].南京:南京林業大學,2009.
[7] 楊宗之.基于LUCC的生態系統服務價值與經濟發展協調性研究 [D].南昌:江西財經大學,2019.
作者簡介:王向春(1987—),男,漢族,山東濱州人,中級工程師,碩士研究生,研究方向:從事測繪、GIS和信息化技術研究工作。