終端區4D飛行軌跡預測與沖突預警
2021-10-20 13:05:18丁松濱管吉晨劉計民
科學技術與工程 2021年28期
關鍵詞:模型
丁松濱, 管吉晨, 劉計民
(1.南京航空航天大學民航學院, 南京 211106; 2.中國民用航空華東空中交通管理局, 上海 200335)
國際民航組織(International Civil Aviation Organization,ICAO)將空中交通管理(air traffic management,ATM)定義為“通過與各方合作,提供設備和服務,對空中交通和空域進行動態、集成管理,以實現安全,經濟和高效的目標[1]。隨著空中交通需求激增,傳統空中交通管制方式弊端日漸增多,空中交通擁堵現象時有發生。因此,基于軌跡運行(trajectory based operation,TBO)的空中交通管理理念應運而生[2]。TBO的核心在于四維軌跡的共享,這不僅要求實時軌跡傳輸,還要求短時、高精度軌跡預測。借助軌跡預測可以實現飛行軌跡精細化管理,增加空域容量,降低沖突可能性,為空管人員提供輔助決策。
飛行軌跡預測應用廣泛,現有航空器飛行軌跡預測方法主要分為三類:一是基于數理統計的預測方法,朱曉輝等[3]將飛機動態數據與飛行意圖結合,利用似然估計原理計算飛機在指定時間區間內處于某一空域鄰域的概率以預測飛行軌跡;張軍峰等[4]構建離散、連續動態航跡預測模型,深入分析飛機原始狀態、意圖、性能等因素對預測精度的影響,有效降低預測不確定性;Franco等[5]基于對數正態分布的航段平均地速建立概率軌跡預測模型,通過輸入航段平均地速,分別計算得到飛行時間與燃油消耗的概率密度函數,成功量化風不確定性對航跡預測的影響。二是基于空氣動力學模型的預測方法,王超等[6]提出基本飛行模型,據此建立各航段垂直、水平和速度剖面并實現完整軌跡擬合;Thipphavong等[7]通過實際飛行軌跡數據動態調整爬升階段飛機動力學方程中飛機重量,有效地提升飛機爬升階段軌跡預測精度。三是基于機器學習的預測方法,Ayhan等[8]構建了三維網格劃分空域,結合氣象數據,利用隱馬爾可夫模型進行軌跡預測;李楠等[9]利用反向傳播(back propagation, BP)神經網絡進行短時飛行軌跡多維特征預測,克服了傳統動力學方程復雜性問題;Pang等[10]利用近似變分貝葉斯改進神經網絡算法應用于飛行軌跡預測,有效減少模型中參數數量;Alligier等[11]利用機器學習理論對11種機型的爬升進行建模以預測爬升階段飛機的重量和速度。
飛行沖突預警的核心技術在于判斷航空器發生潛在沖突的可能性,主要依靠沖突探測實現。現階段,沖突探測技術分兩類,分別是確定型、概率型技術。Hao等[12]利用4DT(4-dimentional trajectory)技術進行飛機動力學建模分析,預測未來航空器軌跡,采用5架航空器進行仿真實驗,判斷時空棱柱的空間關系,實現沖突探測。
航空器實際飛行過程復雜,傳統動力學模型條件過于嚴苛,對實際飛行軌跡預測效果并不理想,而現階段基于機器學習的軌跡預測集中于神經網絡(neural networks algorithm,NNA)及相關改進算法的研究,但NNA優化目標為經驗風險最小,容易陷入局部最優,模型預測不確定性較大,需要大規模、高質量數據進行訓練。為此,提出一種基于孿生支持向量回歸的4D飛行軌跡預測模型。首先,利用重采樣技術降低飛行軌跡數據規模;然后構建訓練集輸入、輸出矩陣,計算得到預測模型;然后建立航空器沖突預警指示函數;最后進行飛行軌跡實時預測,利用回歸誤差分析進行預測結果檢驗,并對指定航空器進行安全評估。
1 孿生支持向量回歸
孿生支持向量回歸(twin support vector regression,TSVR)由Peng改進支持向量回歸(support vector regression,SVR)得到,優點在于泛化能力強,且計算效率大幅提高,算法時間復雜度縮短為傳統SVR的1/4[13]。本質上,TSVR通過建立原始數據集x的兩個二次規劃問題(quadratic programming problems,QPPs)求解產生ε-不敏感(ε為誤差不敏感度,即誤差<ε時,認為誤差為0),上、下限函數分別表示為fupper(x)、flower(x),最終回歸函數f由fupper與flower加權平均得到[14]。為計算fupper和flower,根據QPPs問題建立優化方程為
(Xw1+eb1)]+c1eTξ
s.t.Y-(Xw1+eb1)≥eε1-ξ,ξ≥0
(1)

(2)

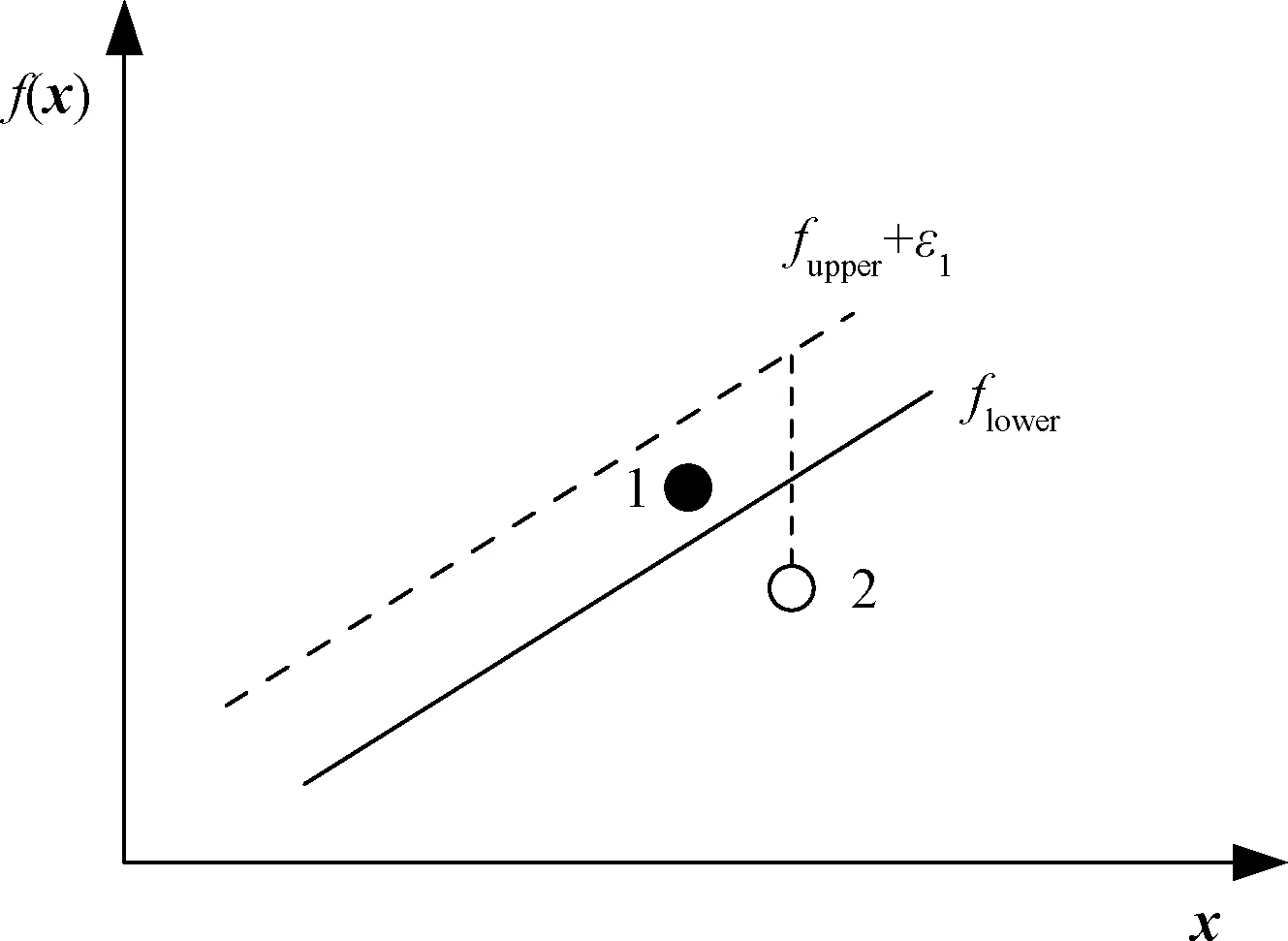
圖1 ε不敏感區間Fig.1 The geometric interpretation forε-insensitive interval
在工程領域,由于問題的復雜性,樣本集通常呈現高度非線性化,因而線性擬合的實用價值較低。通過引入核函數可以將線性TSVR推廣到非線性領域,建立回歸函數如式(3)、式(4)所示,下限函數的原優化方程如式(5)所示。
f(x)=a1fupper(x)+a2flower(x)
(3)

(4)
式(4)中:a1、a2分別為上下限函數權重,且滿足a1+a2=1;b1、b2為偏置;K(·)為核函數,常用徑向基函數(radial basis function, RBF)。
在有約束的優化問題中,拉格朗日函數是重要的求解方法,通過引入拉格朗日乘子將約束方程轉化為自變量,構建無約束優化問題進行求解。因而對優化函數[式(5)]構建拉格朗日函數,并建立其對偶方程,如式(6)、式(7)所示。
[K(X,XT)w1+eb1]}+c1eTξ
s.t.Y-[K(X,XT)w1+eb1]≥eε1-ξ,ξ≥0
(5)
eb1]}T{Y-eε1-[K(X,XT)w1+eb1]}+
c1eTξ-αT{Y-[K(X,XT)w1+eb1]-eε1+
ξ}-βTξ
(6)

s.t.0≤α≤c1e
(7)
式中:α和β為拉格朗日乘子,滿足α>0,β>0;H=[K(X,XT)e];f=Y-eε1;L(·)為損失函數。
逐次超松弛技術是一種用于求解大規模線性方程組的迭代算法[15],文獻[16]中指出,逐次超松弛技術可以求得QPPs收斂解。因而,運用該算法求解式(7)得到w1、b1,同理求得w2、b2,最終建立回歸函數f(x)。
2 飛行軌跡預測模型
2.1 飛行軌跡重采樣

由于ADS-B設備以秒為單位與飛機通信并存儲數據,因而存在大量冗余數據,為提高模型計算速度,擬采用時間間隔Δt對飛行軌跡進行重采樣。重采樣算法如圖2所示。
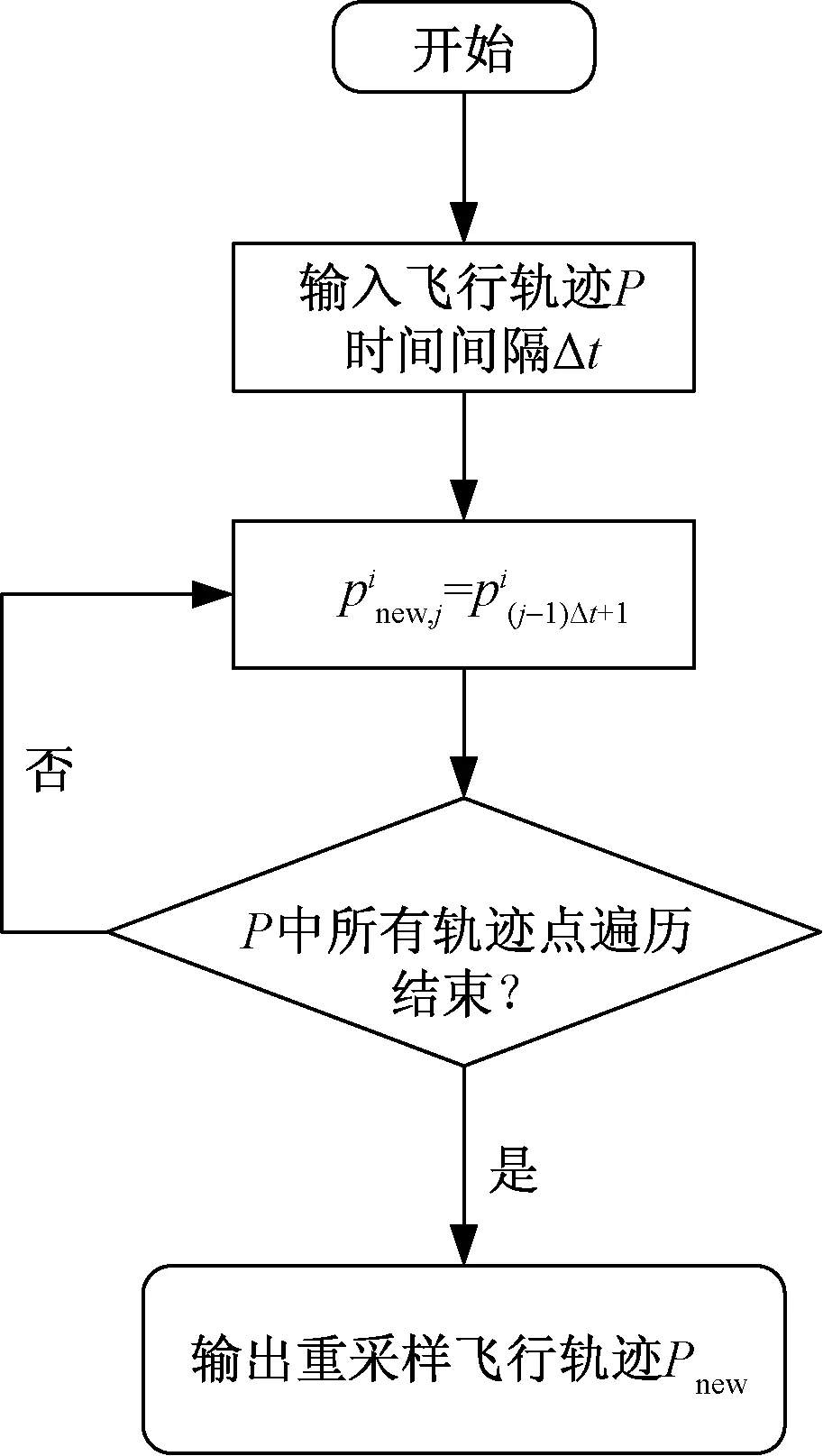
為第i種屬性第j個新飛行軌跡點;為第(j-1)Δt+1 個原始飛行軌跡點;Pnew為由重采樣軌跡點集組成的飛行軌跡圖2 飛行軌跡重采樣流程Fig.2 Resampling process of flight trajectory
重采樣前后航空器軌跡對比如圖3所示。紅色圓點表示原始飛行軌跡,時間間隔1 s;○為重采樣飛行軌跡,時間間隔10 s。通過飛行軌跡重采樣能夠在保留原始飛行軌跡特征的前提下有效降低數據規模,提升計算速度,增強預測的實時性。
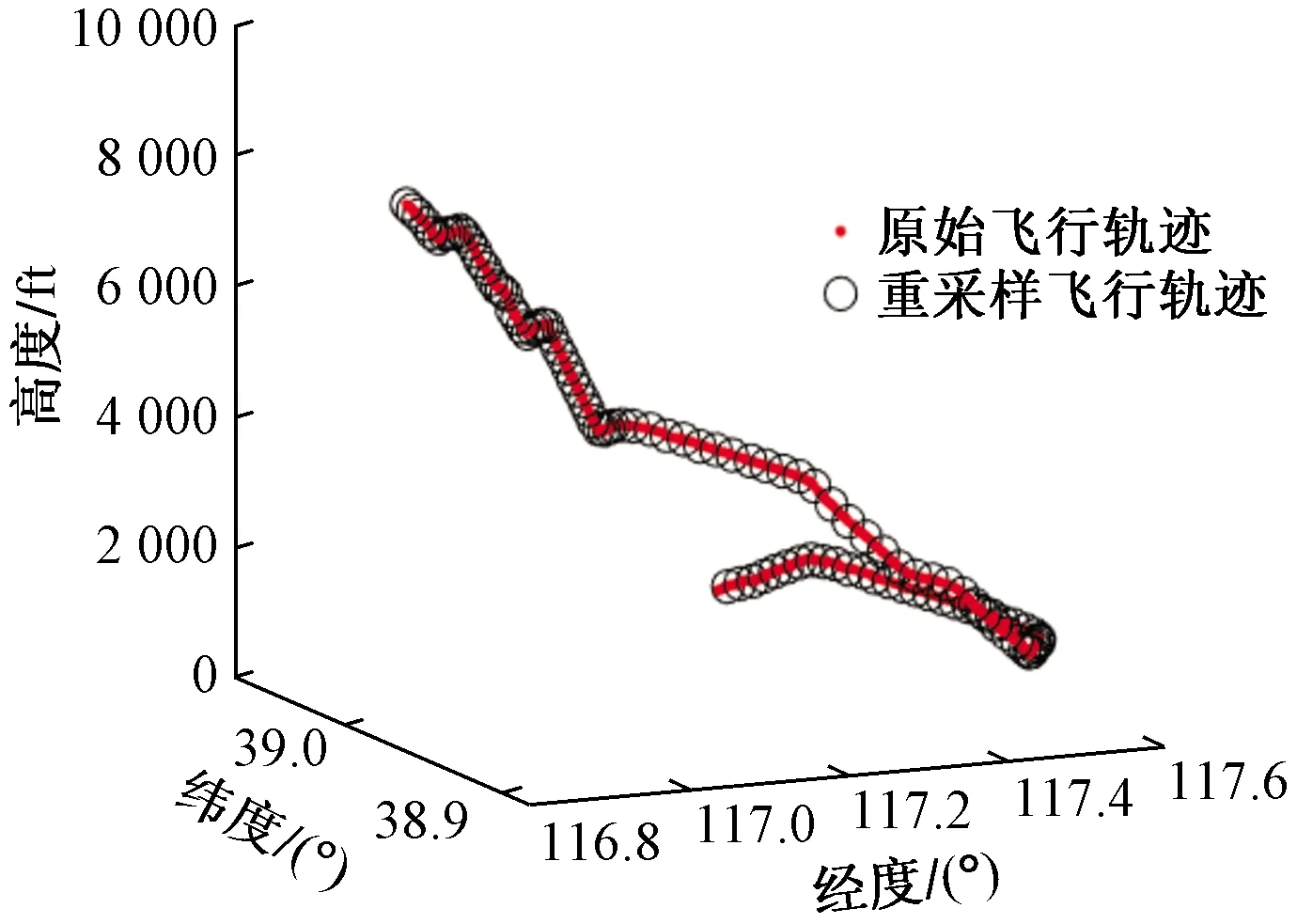
1 ft=3.048×10-1 m圖3 重采樣與原始軌跡對比Fig.3 Contrast of resampling and raw trajectory
2.2 預測模型構建

根據預測步長可以定義航空器軌跡預測提前量φ(t),若是單步預測,則預測提前量為兩相鄰軌跡點時間間隔,若是多步預測,則為起始預測點與最終預測點時間間隔。
在TSVR飛行軌跡預測模型構建過程中,需要訓練集樣本進行模型訓練,設訓練集輸入矩陣XTrain維度l×k,訓練集輸出矩陣YTrain維度l×1。其中,l為訓練集輸入、輸出樣本數目,最終飛行軌跡預測流程如圖4所示。
3 航空器沖突預警指示函數
高精度軌跡預測為航空器未來態勢感知提供保障,可應用于短時沖突分析,降低管制員工作負荷,提升空中交通智能化水平。在終端區內,水平間隔與垂直間隔是常用的管制調配手段,通過調整航空器水平、垂直間隔避免沖突發生,可有效保證航空器安全運行。航空器最小水平間隔為6 000 m,最小垂直間隔是300 m,如圖5所示。由此定義航空器沖突預警閾值I(A,B)[17]可表示為

(8)
通過引入航空器沖突預警指示函數,將4D飛行軌跡預測與任意兩個給定航班之間的安全評估相結合。若軌跡預測模型計算短時軌跡距離小于安全間隔閾值,則可以提醒管制員和飛行員采取適當的措施以增加安全系數。
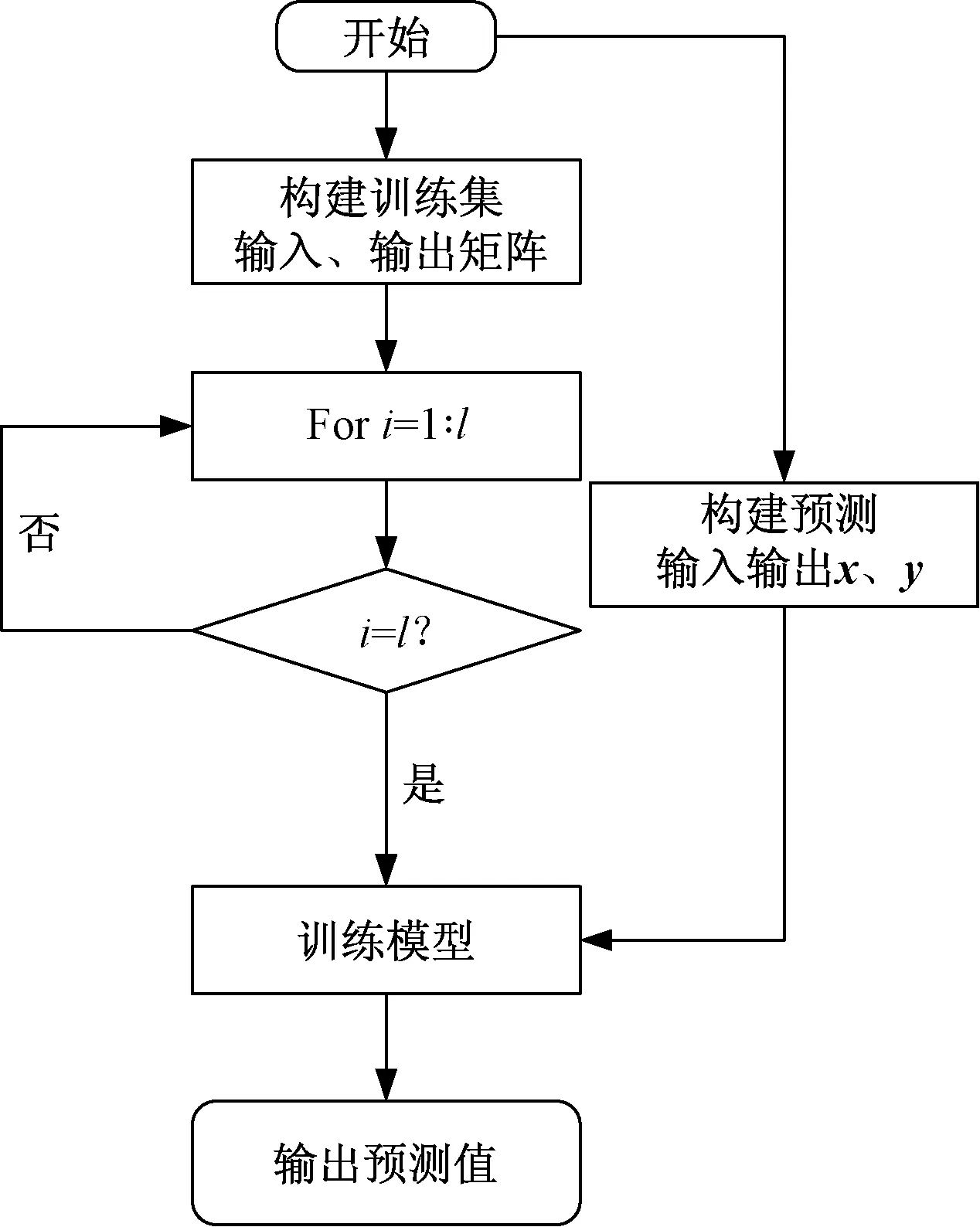
i為訓練集樣本序號圖4 飛行軌跡預測流程Fig.4 Flow of flight trajectory prediction
4 實驗分析
選取天津濱海機場進近航空器4條進場軌跡(CCA1318、CHB6237、CGZ7147、CXA8209)進行實驗分析,進近航空器多機動動作,軌跡變化明顯,具有良好的分析價值。迭代方法為單步迭代,經重采樣軌跡點時間間隔為10 s,因為軌跡預測提前量為10 s。實驗環境Windows10操作系統,2.4 GHz CPU,8 GB內存,實驗軟件MALTAB2018a。
4.1 數據預處理
ADS-B只能記錄飛機的經緯度信息,為進行航空器飛行間隔計算,需將經緯度轉化為直角坐標。擬以機場基準點(aerodrome reference point,ARP)為原點,采用Jenny[18]建立空間直角坐標系,正北、正東為縱軸(y軸)、橫軸(x軸),立軸(z軸)坐標即高度值(單位:ft),轉化示例如表1所示。
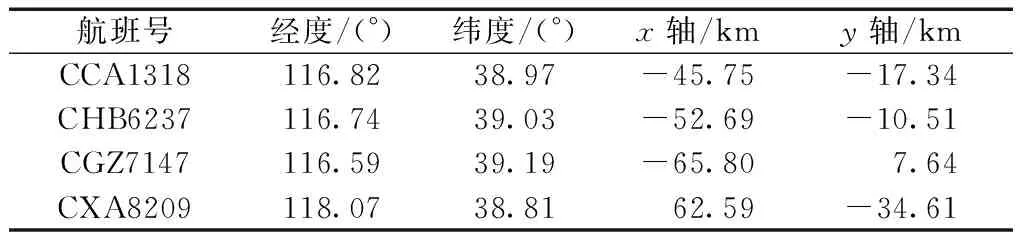
表1 航班部分坐標轉換對比
軌跡數據的x-y-z坐標量綱不同,直接計算影響預測精度,因而采用歸一化算法消除量綱影響,數據歸一化算法可以提高計算效率,增強預測能力,擬采用min-max標準化算法,其計算公式為

(9)

4.2 預測評價指標
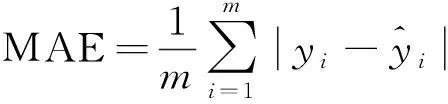
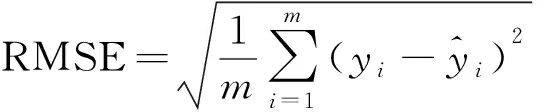
回歸預測分析需要指標進行誤差評價,以對比模型的優劣。在線性回歸模型中,通常采用決定系數,但在高維非線性問題中,該指標常出現大于1的情況,無法正確評價模型。因而,擬綜合采用殘差、平均絕對誤差(mean absolute error, MAE)、均方根誤差(root mean square error, RMSE)進行模型有效性評估。

(10)
(11)
(12)

4.3 預測結果
圖6(a)、圖6(b)、圖6(c)分別為航班CCA1318航班x坐標、y坐標和z坐標時序預測圖,截取部分展示,其中x坐標的預測時段是710~850 s,y、z坐標的預測時段分別是610~850 s和60~400 s。圖6(d)是為軌跡三維預測圖。
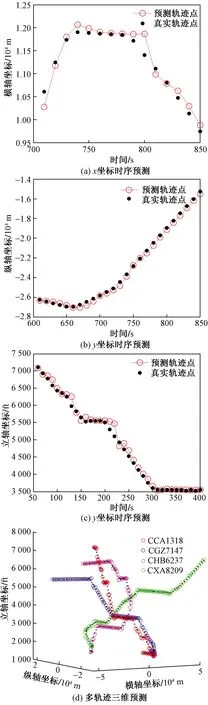
圖6 飛行軌跡預測結果Fig.6 Prediction results of flight trajectory
參數選擇:訓練集樣本個數l=5,樣本屬性k=2,懲罰系數c1=c2=2-5,懲罰系數c3=c4=0.001,核函數帶寬σ=10,間隔ε=0.001。由圖6可知,TSVR算法能夠準確預測目標軌跡點,有效識別航空器運動趨勢。
4.4 模型殘差分析
針對圖6軌跡預測進行誤差分析,計算模型殘差如圖7所示。圖7(a)、圖7(b)、圖7(c)分別為x、y、z坐標預測殘差。由圖7(a)、圖7(b)可知,x、y坐標預測最大殘差分別是801、537 m,由圖7(c)可知,高度殘差最大為243 ft。雖然x坐標預測殘差較大,但大部分軌跡點坐標預測殘差集中在600 m內,僅存在幾處異常值,說明模型總體預測能力較強,滿足實際空中交通管理精度需求,且在該實驗中模型參數一致,針對不同實驗對象,預測效果均表現優秀,說明模型泛化能力較強,具有較高的實際應用價值。

+表示離群值圖7 飛行軌跡預測殘差Fig.7 Predction error of flight trajectory
4.5 航空器沖突預警

圖8 軌跡間距離對比Fig.8 Comparision of distance between two trajectories
4.6 多算法對比
機器學習中,除支持向量機(support vector machine,SVM)之外,還有神經網絡及相關改進算法、貝葉斯算法、集成學習(以隨機數、隨機森林為代表)等,其中,以神經網絡的應用最為廣泛。在航空器軌跡預測領域,較多學者采用神經網絡或相關改進算法進行研究分析。為對兩種主流算法進行對比,現引入反向傳播(back propagation,BP)神經網絡進行預測實驗,其中BP神經網絡參數選擇為隱含層神經元數目10,最大迭代次數100,學習率0.15,誤差閾值0.000 01,預測軌跡點數目80。最終對比結果如表2所示。
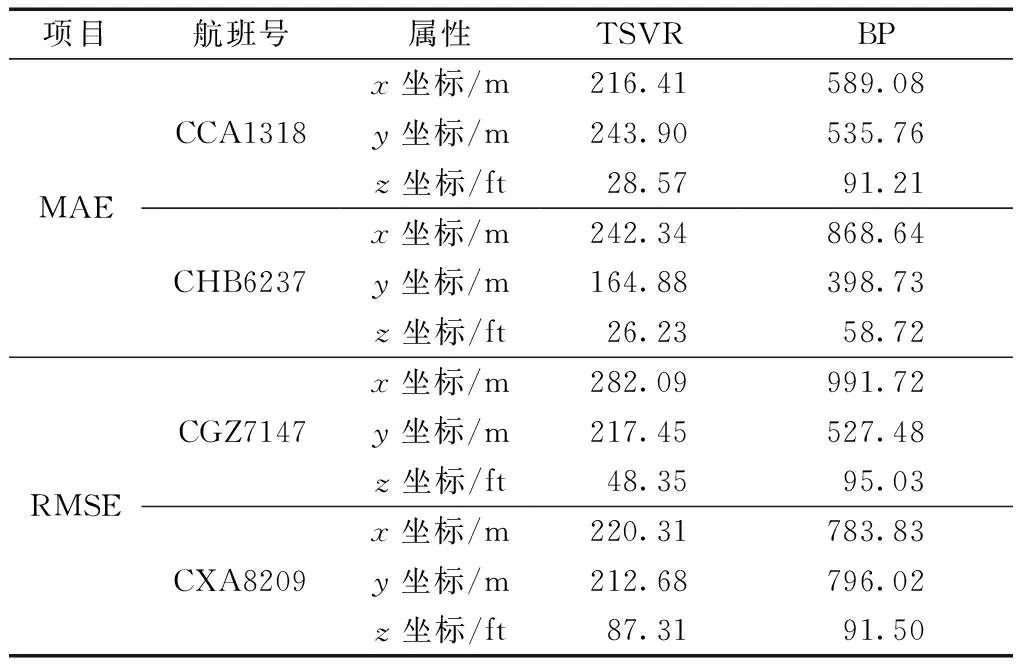
表2 TSVR和BP算法MAE、RMSE對比
通過對比可知,3種屬性,4條軌跡,兩種誤差算法所得TSVR誤差值均小于BP神經網絡算法,其中,以MAE評估x坐標預測誤差平均減少505 m,y坐標、z坐標預測誤差分別減少419 m和42 ft,以RMSE評估則分別減少577、350 m、29 ft,證明TSVR預測精度優于BP神經網絡。此外,實驗中TSVR算法百次運行時間平均值約為2.37 s,單軌跡點預測耗時0.03 s,BP神經網絡則為12.53 s,單次耗時0.16 s,證明TSVR算法計算效率高,綜上所提出基于TSVR軌跡預測模型具有優良的性能。
4.7 參數靈敏度分析
超參數的引入是機器學習算法的重要特征,超參數無法通過模型訓練得到,需要提前設置,因而,超參數的取值對模型的計算效果有重要影響。在TSVR算法中包含ε、c1、c2、c3、c4、σ,設置c1=c2,c3=c4。此外,在預測環節,訓練集樣本個數l、樣本屬性k同樣屬于超參數。
以CXA8209軌跡x距離為實驗數據,對超參數進行賦值,以探究超參數對模型精度的影響,實驗結果如圖9所示。超參數取值如表3所示。
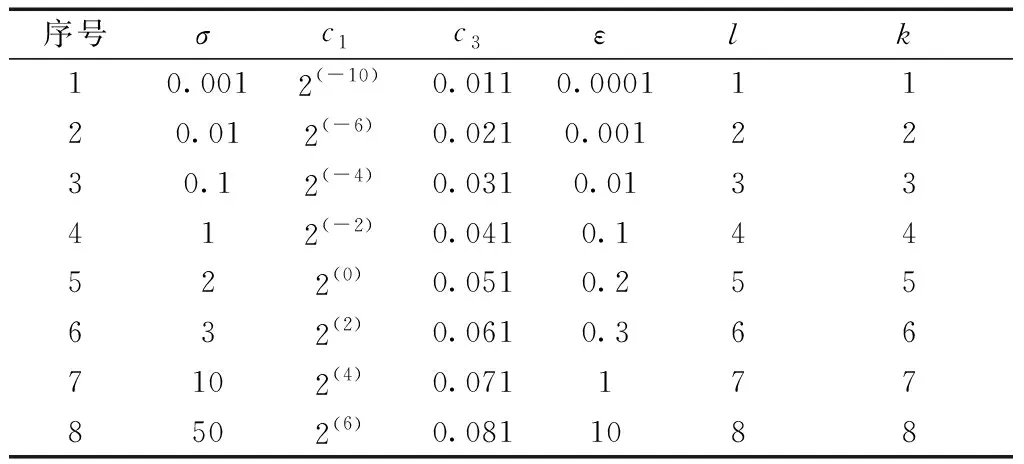
表3 超參數取值
圖9中,核函數帶寬σ、懲罰系數c1、c3對模型預測精度影響較大。隨著σ取值增大,預測模型模型RMSE誤差取值先減小后增大,表明模型預測精度先增加后降低,而隨著c1、c3取值增大, RMSE逐漸增大,模型預測精度逐漸降低。間隔ε和樣本屬性k對精度影響較小,ε、k增大RMSE基本不變,而訓練樣本數目l增大,RMSE減小,模型預測精度逐漸提升,但當l>3時,模型精度基本不變。

圖9 參數靈敏度檢驗Fig.9 Sensitivity analysis of parameters
5 結論
基于孿生支持向量回歸算法建立航空器飛行軌跡實時預測模型以實現航空器短時沖突預警。首先,利用重采樣算法進行軌跡預處理,降低數據規模,提升模型計算效率。然后,基于歷史飛行軌跡點進行回歸函數訓練,建立4D飛行軌跡預測模型,采用遞歸預測的思想,實現飛行軌跡的動態預測。最后,建立航空器沖突預警指示函數,判斷兩航空器間潛在飛行沖突。基于TSVR的飛行軌跡預測模型能夠克服傳統空氣動力學建模困難的問題,仿真實驗證明,模型泛化能力強,數據需求較小,避免大規模數據訓練,相較于BP神經網絡算法預測精度更高、計算速度更快,具有良好的實用價值。僅對模型中超參數進行靈敏度分析,未來考慮超參數優化以實現更為精準的預測效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
