實時智能地震處理系統研發及其在2021年云南漾濞MS6.4地震中的應用
2021-10-20 06:12:04廖詩榮張紅才范莉蘋李珀任黃玲珠房立華秦敏
地球物理學報 2021年10期
廖詩榮,張紅才,2,范莉蘋,李珀任,黃玲珠,房立華,5*, 秦敏
1 福建省地震局,福州 350003 2 中國地震局廈門海洋地震研究所,廈門 381000 3 中國地震局地球物理研究所,北京 100081 4 中國地震局震源物理重點實驗室,北京 100081 5 防災科技學院,河北三河 065201 6 云南省地震局,昆明 650224
0 引言
我國地震臺網觀測數據的處理流程主要包括事件檢測、震相到時拾取、地震定位和震級測定等環節,目前主要依靠人工完成.隨著地震臺網的不斷加密,以及大規模流動地震臺陣和短周期超密集臺陣的發展,監測到的地震數量將成倍增加.如目前正在實施的“國家地震烈度速報與預警工程”,將在全國建設15000多個地震臺站(李山有, 2018),地震臺站數量將增加10倍多.現有的人工處理模式難以為繼,迫切需要發展自動處理方法來解決海量數據的快速處理問題.
對于中國地震臺網而言,地震預警、速報和編目是其三個重要功能.地震預警和速報主要是處理ML3.0以上的較大地震.據中國地震臺網中心統計,區域臺網記錄到的ML3.0以下地震的數量占比超過92.5%(代光輝等,2019).地震編目是對地震觀測資料進行解釋、分析、處理并產出地震目錄和地震觀測報告的過程(中國地震局,2017),產出內容包括地震目錄(發震時刻、震源位置、震級大小、地震類型等)、震相到時、震相類型、初動極性、振幅和周期等信息.匯總形成的觀測報告是地震臺網最重要的產品之一,在地震活動性分析、地震預測預報和地球內部結構研究等領域發揮著重要作用,被廣泛用于地震精定位和體波走時層析成像研究(Zhang and Thurber,2003;Thurber et al.,2004;吳建平等,2013;易桂喜等,2013;蔣長勝等,2015;房立華等,2018;Wang et al.,2018;Li et al.,2019).中強地震發生后,在短時間內通常會伴隨著成千上萬個余震.快速處理這些余震序列,可以為地震應急救援、地震序列類型研判、余震序列精定位、震源機制解節面確定、地震破裂過程反演和ShakeMap計算,以及發震構造等研究提供重要參考信息(易桂喜等,2013;Fang et al., 2013;張勇等,2015).
我國目前共有1200多個測震臺站,每月編目地震數達數萬條(代光輝等,2019).現在的地震編目主要依靠人工完成.一方面,受專業素養、經驗積累、操作習慣等因素的影響,對于同一次地震事件,尤其是信噪比較低的地震波形,由于到時拾取標準不一致,不同編目人員會給出不同的分析結果.另一方面,當中強地震或地震序列發生時,在短時間內需要處理成千上萬個地震,人工分析時效性差,且經常會遺漏一些震級較小的地震,導致地震序列目錄不完整.此外,隨著我國地震監測臺站數量和規模的不斷擴大,臺網監測能力不斷提升,可編目的地震數量和記錄臺站數將越來越多,依靠現有人工處理完成地震編目的工作模式將面臨重大挑戰.
為解決地震數據自動處理的問題,國內外很多學者和研究機構開發了多個處理系統.自2008年起,我國研發了多個基于實時觀測數據的實用化地震自動處理系統(金星等,2007;梁建宏,2009;黃文輝等,2016b),這些系統均以ML3.0以上地震自動速報為目標,尚不具備自動處理微小地震的能力.目前,即便是國際上已經得到廣泛應用的Earthworm(Johnson et al., 1995)與SeisComP3(Hanka et al., 2010)等系統也不具備自動處理微小地震的能力.只有解決這些數量眾多的微震的自動檢測,才能充分發揮密集臺網的觀測優勢.Tamaribuchi(2018)基于特征函數率檢測方法(characteristic function ratio)和震相組合正向搜索法(The Phase combination Forward search)發展了一套自動處理系統,該系統在日本東北地區檢測出的地震數量增加了近1倍.Yeck等(2019)發展了GLASS3震相關聯方法,實現了本地、區域和全球范圍內地震的實時監測.Scafidi等(2019)和Spallarossa等(2020)發展了CASP系統,該系統檢測到地震的數量比人工目錄多數倍.這些系統大都應用傳統的震相自動拾取算法,部分具有處理微小地震的能力.我國的地震臺網分布范圍廣,臺站密度和背景噪聲水平差異較大,且地殼速度結構變化較劇烈,這些系統難以滿足我國地震編目工作的需求.例如,即使是在臺網較為稀疏的地區,通常只要有3個臺站記錄到5個震相到時就要產出地震目錄,而國外的這些系統的觸發閾值均需超過4個以上臺站.
地震檢測和到時拾取是地震數據自動處理的關鍵一步,后續處理還包括震相關聯、地震定位、震級測定等步驟.2017年,中國地震局地球物理研究所與阿里云聯合舉辦了“余震捕捉AI大賽”.此次比賽中,應用人工智能算法的參賽隊伍取得了優異成績,表明人工智能技術在微震檢測領域具有良好的應用前景(Fang et al., 2017).2018年以來,以深度學習為代表的地震檢測方法開始逐漸得到應用(Pero et al., 2018; Ross et al., 2018; Kong et al., 2019; 蔣一然和寧杰遠, 2019; Zhu et al., 2019; Zhu and Beroza, 2019; Wang et al., 2019; 趙明等, 2019; 周本偉等, 2020;于子葉等, 2020).特別是在震相拾取領域,多個地震檢測模型得到了廣泛關注,如基于卷積神經網絡的GPD模型(Ross et al., 2018),基于U-Net的PhaseNet模型(Zhu and Beroza, 2019),基于LSTM網絡的EQTransformer模型(Mousavi et al., 2020)及其改進版本S-EqT(Xiao et al., 2021)等.最近,處理連續波形數據得到高精度、完整的地震目錄,逐漸成為新的研究趨勢.Liu等(2020)應用PhaseNet模型和REAL震相關聯算法(Zhang et al., 2019)對2019年美國RidgecrestMW7.1地震序列進行處理,檢測出的地震數量是人工目錄的2倍多.Park等(2020)、Wang等(2020)和Tan等(2021)將類似的流程應用于誘發地震研究中.趙明等(2021)以長寧地震為例,應用遷移學習和震相關聯,初步構建了從連續波形中產出地震目錄的流程.但上述研究都是基于離線的連續波形數據,并未實現針對實時觀測數據的在線處理.本文介紹了基于人工智能算法的實時地震處理系統(簡稱“實時處理系統”)的設計和研發情況,對系統的架構設計和核心功能模塊進行重點介紹,并以2021年5月21日云南漾濞MS6.4地震序列為例,展示了該系統實時處理地震序列的效果.
1 實時處理系統介紹
自2018年開始,中國地震局監測預報司開始推動實時處理系統的研發.研發團隊當年完成了系統架構設計,并基于FilterPicker地震檢測(Lomax et al.,2012)和NLLoc地震定位方法(Lomax et al.,2008),初步實現了首都圈與福建地區ML1.5以上地震的自動處理.但對于ML1.5以下的地震,由于波形信噪比低,處理效果較差,誤檢和漏檢比例較高.2019年,研發團隊對處理系統的各模塊進行優化,重點探索了不同地震檢測算法的有效性,并完善了震相關聯算法,使其可處理省級區域地震臺網和全國地震臺網的數據.2020年,研發團隊將深度學習地震檢測方法應用于實時數據處理,采用PhaseNet(Zhu and Beroza, 2019)和EQTransformer(Mousavi et al., 2020)兩種模型進行數據處理,分別使用2013年四川蘆山MS7.0地震、2019年四川長寧MS6.0地震和2018年四川石棉MS4.1地震序列的連續波形數據進行離線測試,并使用西昌臺陣、福建地震臺網和全國地震臺網的數據進行在線測試.2021年,研發團隊繼續對系統進行優化,將事件觸發最小閾值由7個震相降低至5個震相,初步解決了在臺網稀疏地區漏檢率較高的問題.
實時處理系統從我國地震編目工作的實際需求出發,針對省級臺網中心負責本省行政區內地震的分析工作,國家臺網中心綜合產出全國統一地震目錄的現有工作模式(代光輝等,2019),以現有的地震編目數據處理流程和評價指標為基礎,并考慮未來業務發展需求進行整體系統設計.實時處理系統采用分布式架構、模塊化設計,模塊可靈活定制,相關功能模塊可分階段、協作研發,處理效率高,對計算機配置要求低.
(1)系統架構
實時處理系統的設計目標是實現實時快速產出地震目錄、事件類型、震相報告等信息,快速產出地震精定位和震源機制解,分析人員可以在自動處理結果的基礎上,進行快速復核與修訂,產出正式地震目錄與詳細震相報告.
在參考目前國際上廣泛采用的Earthworm(Johnson et al., 1995)、Hydra(Patton et al., 2016)、SeisComP3(Hanka et al., 2010)、JOPENS(黃文輝等,2016a)等地震數據處理系統架構的基礎上,實時處理系統總體架構如圖1所示.該系統包括AI震相撿拾、關聯與定位、震級測定、單臺記錄地震處理、事件類型判別、快速地震精定位、快速震源機制解等7個數據處理模塊,包括波形共享、消息交換、人工編目接口、可視化界面等4個系統支撐模塊,可處理的數據源包括測震、強震、烈度計等不同類型的實時波形數據.
(2)數據處理流程
以全國地震編目工作為例,實時處理系統各個模塊分布式部署在省級中心與國家中心(圖1),其數據處理流程如圖2所示.
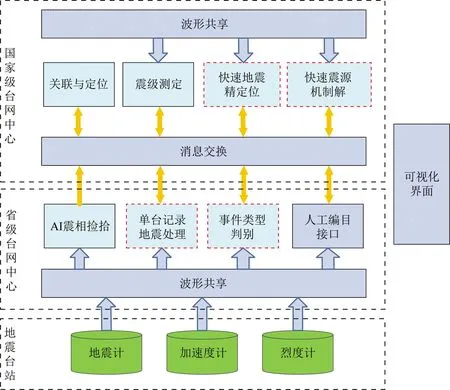
圖1 實時智能地震處理系統總體架構示意圖
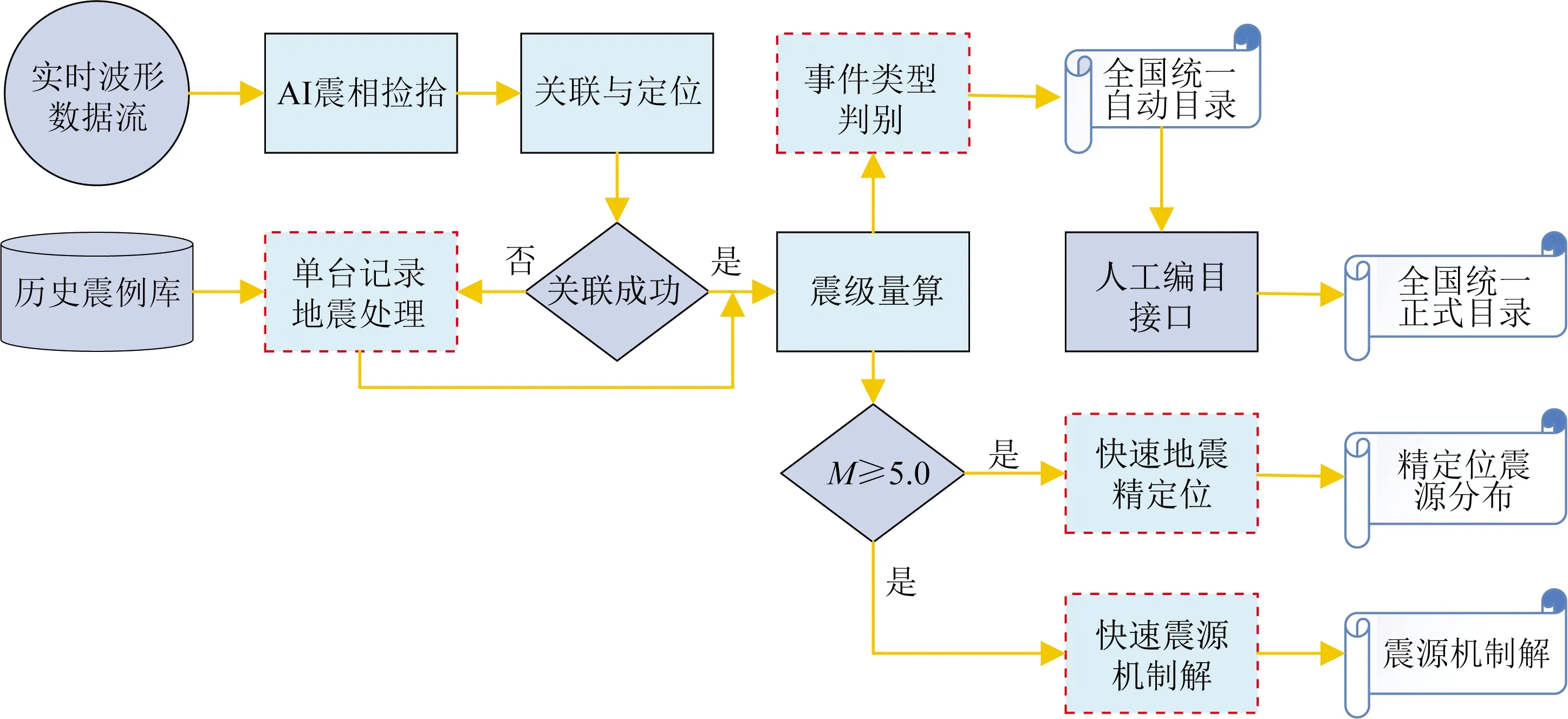
圖2 實時處理系統數據處理流程示意圖
AI震相撿拾模塊從實時波形數據流服務器中獲取本省各個站點的實時波形數據流,采用AI算法撿拾出單個臺站的震相到時、震相類別、初動方向等單臺撿拾信息,這些信息通過消息交換模塊發送至部署在國家中心的關聯與定位模塊,進行震相組合、誤觸發剔除及震源位置測定.關聯失敗的單臺撿拾信息,發送給單臺記錄地震處理模塊,依據波形相似性產出單臺定位結果,或者直接產出不含震源位置信息的單臺記錄地震目錄.對于關聯成功的地震事件,自動截取事件波形記錄,并通過波形共享模塊為其他數據處理模塊提供事件波形共享服務.震級測定模塊完成各類型震級的計算,事件類型判別模塊利用AI技術實現天然地震與非天然地震的區分.經過以上數據處理流程,可以實時產出全國統一自動地震目錄.
省內的自動處理信息通過人工編目接口發送至人工地震編目系統,地震分析人員在自動處理結果的基礎上,對震相到時、震相類型、初動方向等進行快速確認與修訂,進而產出全國統一正式目錄.對于震級較大的地震,還可通過地震精定位模塊產出精定位后的震源位置分布圖,通過快速震源機制模塊產出震源機制解或矩張量解.
(3)模塊功能設計
實時處理系統包含7個數據處理模塊與4個支撐模塊(圖1).其中AI震相拾取、關聯與定位、震級測定等3個數據處理模塊與4個支撐模塊已實現在線運行.單臺記錄地震處理、事件類型判別、地震精定位和震源機制解反演4個數據處理模塊正在測試.
4個支撐模塊的主要功能包括:從實時波形流服務器中接收數據,為數據處理模塊提供波形共享內存服務;以通用消息中間件軟件為平臺,為數據處理模塊提供消息接收、解析、分發等服務,實現各個模塊之間的協同工作;匯聚各個數據處理模塊產出的自動處理結果,寫入人工編目系統數據庫,分析人員可在自動處理結果的基礎上,對震相到時、震相類別、初動方向等進行快速確認與修訂,產出正式地震編目信息;實時顯示自動識別的震相、測定的地震參數和各模塊狀態,顯示震中分布圖、M-t圖和地震頻次統計等常用圖件.
已實現在線運行的3個數據處理模塊的功能如下:
(1)AI震相撿拾模塊.基于PhaseNet和EQTransformer兩種深度學習算法對實時波形數據進行檢測,實現數據預處理、矩陣構建、模型調用、震相到時提取等功能,為其他模塊提供高精度的震相到時和震相類別等信息.
(2)關聯與定位模塊.震相關聯采用基于組觸發和等時差八叉樹搜索相結合的方法(Lomax et al., 2008;Tamaribuchi,2018),事件觸發閾值最低可達5個震相,可滿足小孔徑臺網、省級區域臺網和全國臺網的震相關聯需求.可利用一維或三維速度模型,采用Hypo2000(Klein,2002)、HypoSAT(Schweitzer, 2001)和NLLoc(Lomax et al.,2008)等多種方法進行地震定位.
(3)震級自動量算模塊.利用波形共享模塊中的事件波形數據,按照我國現行的震級國家標準(GB 17740-2017),對波形記錄進行預處理,然后進行振幅與周期的自動量取,計算ML、mB(BB)和MS(BB)等多個震級.
2 漾濞地震序列自動處理
2021年5月21日21時48分云南漾濞發生MS6.4地震,此次地震是一個典型的前—主—余震型地震序列(蘇金波等,2021;Yang et al., 2021).漾濞地震距北東側的喬后—巍山(維西—喬后)斷裂約3~10 km.地震序列受一個發育程度不高、含多級雁列構造的北西向為主、北東向為次的共軛走滑斷層系統所控制.余震區長軸呈NW-SE向展布,長約22 km,震源深度主要分布在4~8 km.余震分布呈北西窄、南東寬的特征(雷興林等,2021;龍峰等,2021;Yang et al., 2021).
5月28日研發團隊在云南省地震局部署實時處理系統,下午17時開始在線運行.該系統從實時波形流服務器中接入云南及周邊地區105個地震臺站(圖3)的波形數據,接入的臺站與人工分析使用的臺站完全一致,以便于和人工分析結果進行對比.地震檢測和震相拾取采用PhaseNet方法,檢測窗長為30 s,重疊20 s,滑動時窗10 s.震相關聯采用基于組觸發和等時差八叉樹搜索相結合的方法,地震定位采用NLLoc方法,關聯和定位時使用的速度模型為AK135(Kennett, 2005),事件定位成功閾值設為P與S震相數之和不少于6個.震級按照我國現行的震級國家標準,將波形記錄實時仿真為DD-1型地震記錄(Kanamori et al., 1999;金星等,2004),計算ML震級.
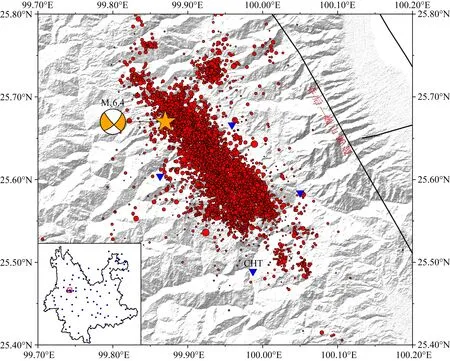
圖3 漾濞地震序列震中分布圖(2021年5月18日至6月24日)
5月28日17時至6月27日12時,在漾濞余震區(25.4°N—25.8°N,99.7°E—100.2°E),云南地震臺網人工分析2752條余震目錄(簡稱“人工目錄”),實時處理系統處理產出6667條余震目錄(簡稱“自動目錄”).為定量比較兩個目錄的差異,我們按照以下規則判定兩個目錄中的地震事件是否匹配:若兩個地震事件的發震時刻差異小于5 s且震中位置差異小于10 km,即認為兩個地震事件是匹配的.若存在多個匹配事件,則以發震時刻差值為依據優先選擇匹配事件;若人工目錄中的事件無法從自動目錄中找到匹配的結果,則認為實時處理系統漏檢測事件,反之則認為實時處理系統多檢測事件.
統計表明,在該時間段內,自動目錄與人工目錄匹配事件為2635個,匹配率為95.75%;漏檢測117個,漏檢率4.25%;多檢測4032個,自動處理的地震數量是人工目錄的2.42倍.圖4展示了自動和人工目錄在震中和震源深度分布方面的差異(圖4).兩個目錄在水平和深度方向都具有較好的一致性,且實時處理系統產出的震中位置條帶狀分布特征十分明顯,震源深度分布也較為合理.
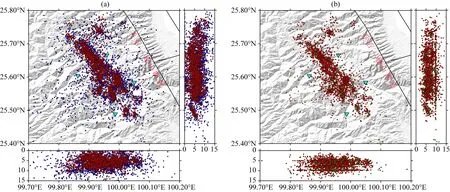
圖4 自動目錄和人工目錄震源位置對比
圖5為自動目錄和人工目錄匹配成功2635個事件的發震時刻、震中位置、震源深度和震級偏差統計圖.自動目錄與人工目錄的發震時刻偏差為0.102±0.495 s,偏差小于±0.5 s的事件占73.6%;震中位置偏差為1.5±1.3 km,偏差小于3km的事件占90.2%;震源深度偏差為-1.3±2.8 km,偏差小于5 km的事件占96.7%;震級偏差為0.15±0.23,偏差小于±0.3級的事件占80.7%.圖6中分別展示了自動目錄與人工目錄匹配的Pg、Sg到時拾取差異統計情況,對于匹配事件且震相類型一致的震相計算到時偏差.統計表明,自動拾取的震相中有16329個Pg震相和14222個Sg震相與人工拾取震相匹配,分別占人工拾取震相數量的84.98%和88.08%.Pg震相平均到時差異為0.097 s±0.71 s,Pg震相拾取偏差小于±0.1 s占85.8%,小于±0.2 s占93.0%,小于±0.5 s占97.9%.Sg震相平均到時差異為0.150 s±0.78 s,Sg震相拾取偏差小于±0.1 s占67.3%,小于±0.2 s占84.2%,小于±0.5 s占96.3%.

圖5 自動目錄中與人工目錄差異統計圖
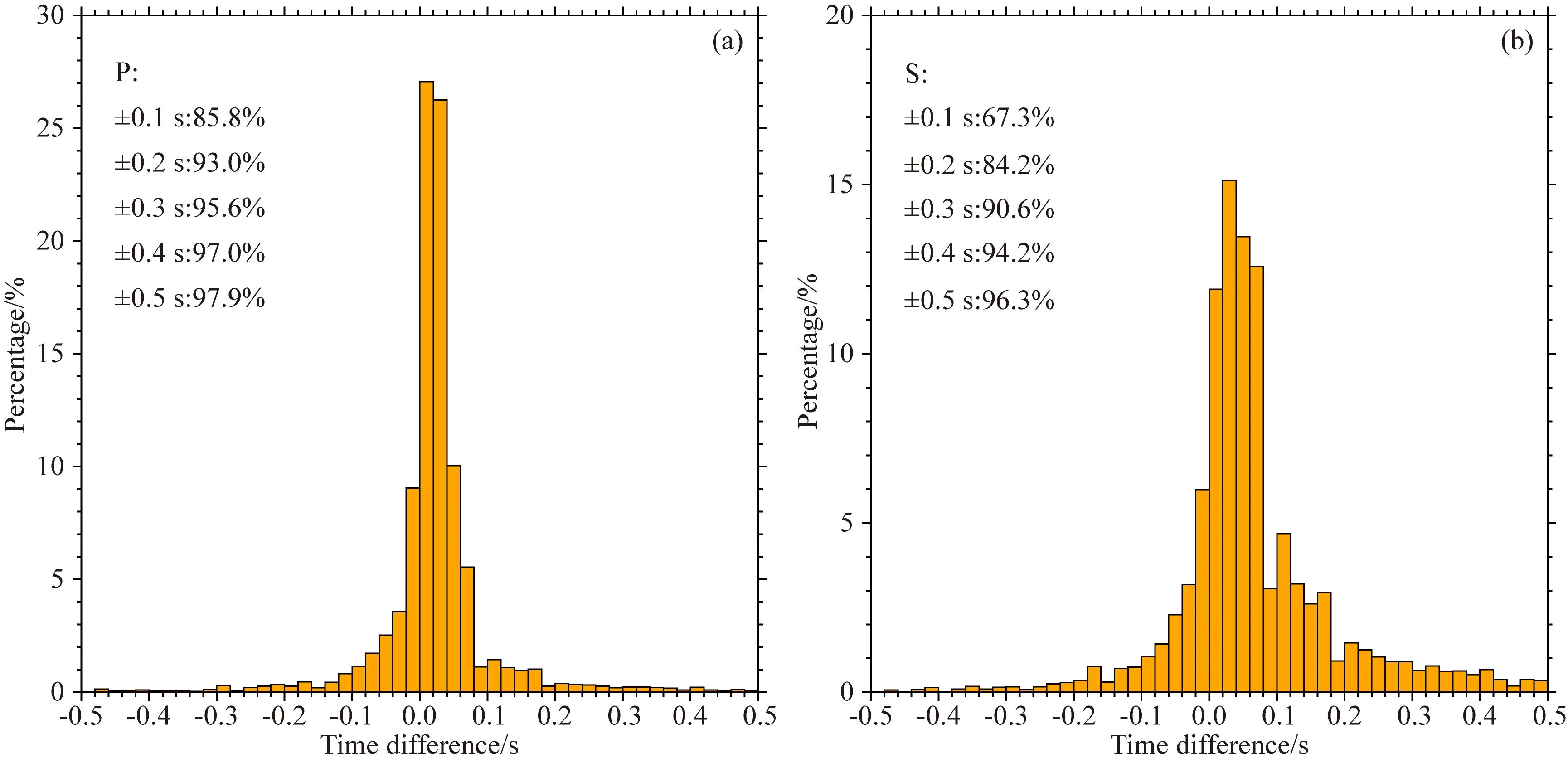
圖6 自動目錄與人工目錄匹配的Pg、Sg到時拾取差異統計圖
我們對比了自動目錄和人工目錄的事件數量(圖7a)和震級分布(圖7b).實時處理系統在線運行后,每天檢測出的地震事件數量明顯多于人工分析結果,產出的事件數量是人工分析事件的2~3倍.由圖7b可見,多檢測事件的震級多數為ML<1.0,這些事件由于震相到時信噪比較低,因而人工分析中往往有所遺漏.而實時處理系統采用的AI震相拾取算法同時使用三分量波形進行判斷,靈敏度更高,因此可以較好地識別這類低信噪比的事件.由圖7c可見,自動目錄的微小地震數量更多,完整性震級更低,因此有助于計算得到更準確的b值.由自動目錄和人工目錄計算得到的b值分別為0.89和0.74.
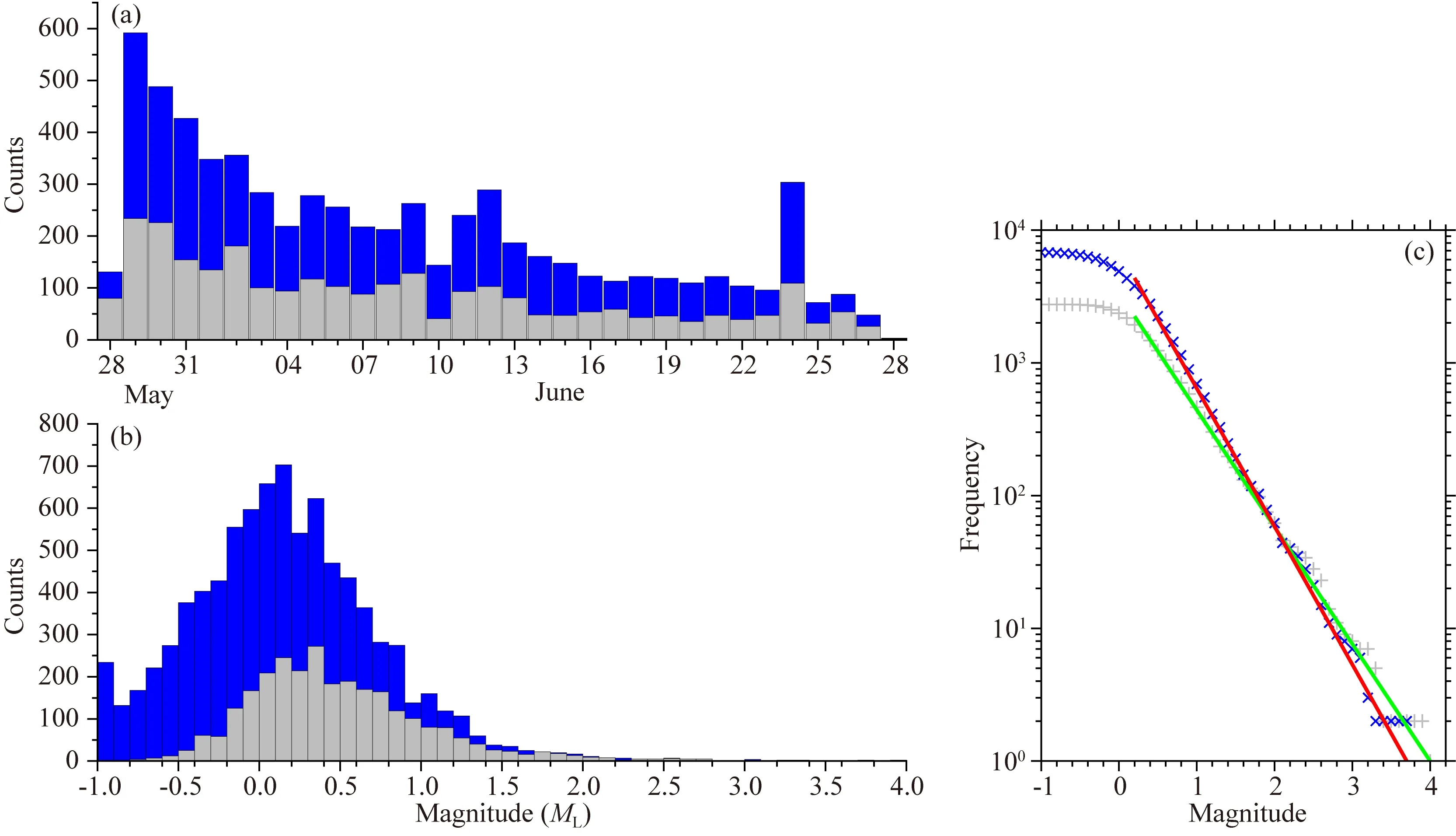
圖7 自動目錄與人工目錄事件數量對比
實時處理系統在線運行期間,不僅處理了漾濞地震序列,還處理了云南全省及周邊地區的地震.一個月內,系統共產出10263條地震目錄,震級分布范圍為ML-1.0~ML5.2,其中包括6月10日云南雙柏MS5.1地震序列和6月12日云南盈江MS5.0地震序列(圖8).運行結果表明,實時處理系統可在震后2~4 min內自動產出云南全省的地震目錄.
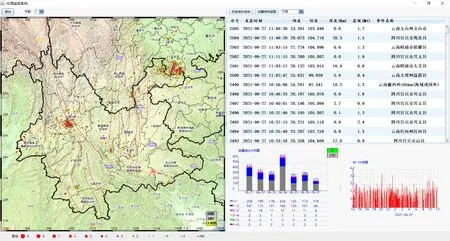
圖8 實時處理系統運行狀態監視界面
3 討論
2018年以來,基于深度學習的地震檢測方法取得了很大進展,在地震檢測能力、到時拾取精度和處理效率等方面較其他方法都有明顯提升.但目前的研究,多數仍聚焦在地震檢測和到時拾取方面,將人工智能算法應用于實時波形處理中的研究和應用仍比較少,極大的制約了人工智能在實時地震學方面的應用.
根據我國地震活動特點、臺站分布和地震業務發展需求,我們研發了一套基于人工智能的實時地震處理系統,實現了地震自動檢測、震相拾取、震相關聯、地震定位和震級測定等功能,具備實時、高靈敏度、高精度的地震目錄產出能力.在系統研發測試階段,我們分別使用2013年四川蘆山MS7.0地震、2019年四川長寧MS6.0地震和2018年四川石棉ML4.1地震序列的連續波形數據,對系統性能進行離線測試,并使用西昌地震臺陣、福建地震臺網和全國地震臺網的數據進行實時在線測試.漾濞地震發生后,我們于5月28日在云南省地震局部署了實時處理系統,該系統實時處理了漾濞MS6.4、雙柏MS5.1和盈江MS5.0等地震序列.系統可在震后2~4 min內產出地震目錄,具備處理密集地震序列的能力,檢測出的地震數量是人工處理的2~3倍,定位精度與人工處理結果相當,震級測量誤差小,震級處理下限可達ML0.0級左右.離線測試與在線運行結果表明,實時處理系統不僅可應用于省級地震臺網的數據自動處理,在水庫、礦山、火山等小型區域臺網中也將具有廣泛的應用前景.
對于實時處理系統,誤檢測和漏檢測的平衡是一個難點,檢測出的地震數量與觸發閾值設定有很大關系.設定較低的觸發閾值,可檢測出的震相數量和地震數量會增加數倍,但誤檢測率會隨之提高.反之,會導致漏檢較多.在前期大量離線測試和對人工編目數據分析的基礎上,本研究設定事件定位成功閾值為P與S震相數之和不少于6個,在控制漏檢測率和誤檢測率上基本取得平衡.對漾濞地震序列的統計表明,自動處理的地震數量是人工目錄的2.42倍,兩個目錄的匹配率為95.75%.
為評估實時處理系統多檢測事件的可信度.本文對實時處理系統1個月內多檢測的4032事件(不包含與人工處理匹配的2635個地震事件),繪制了震中分布圖(圖9a),由圖可見,多檢測事件震中位置絕大多數位于漾濞余震區,具有較高的可信度.本文對余震數量最多的5月29日多檢測出的374個事件進行分析,人工逐一瀏覽事件波形,確定其中364個為漾濞序列地震(97.3%),10個為誤檢測事件(2.7%),誤檢測事件震級均小于ML0.6.我們還從多檢測事件中選擇2個偏離余震區較遠和2個定位殘差較大的事件(震級分布范圍ML-0.7~ML1.0),繪制了波形圖,并標注了自動檢測的震相到時(圖9b~e).由圖可見,近臺波形相對清晰,但遠臺信號衰減很快、信噪比較低,導致自動拾取的震相到時可靠性降低,這些震相參與定位有可能造成較大的定位誤差.如圖9c、e所展示的波形,系統存在將不同事件或干擾誤關聯成同一事件的情況,表明現在采用的關聯算法在處理此類情況時存在一定的缺陷,需要進一步優化.
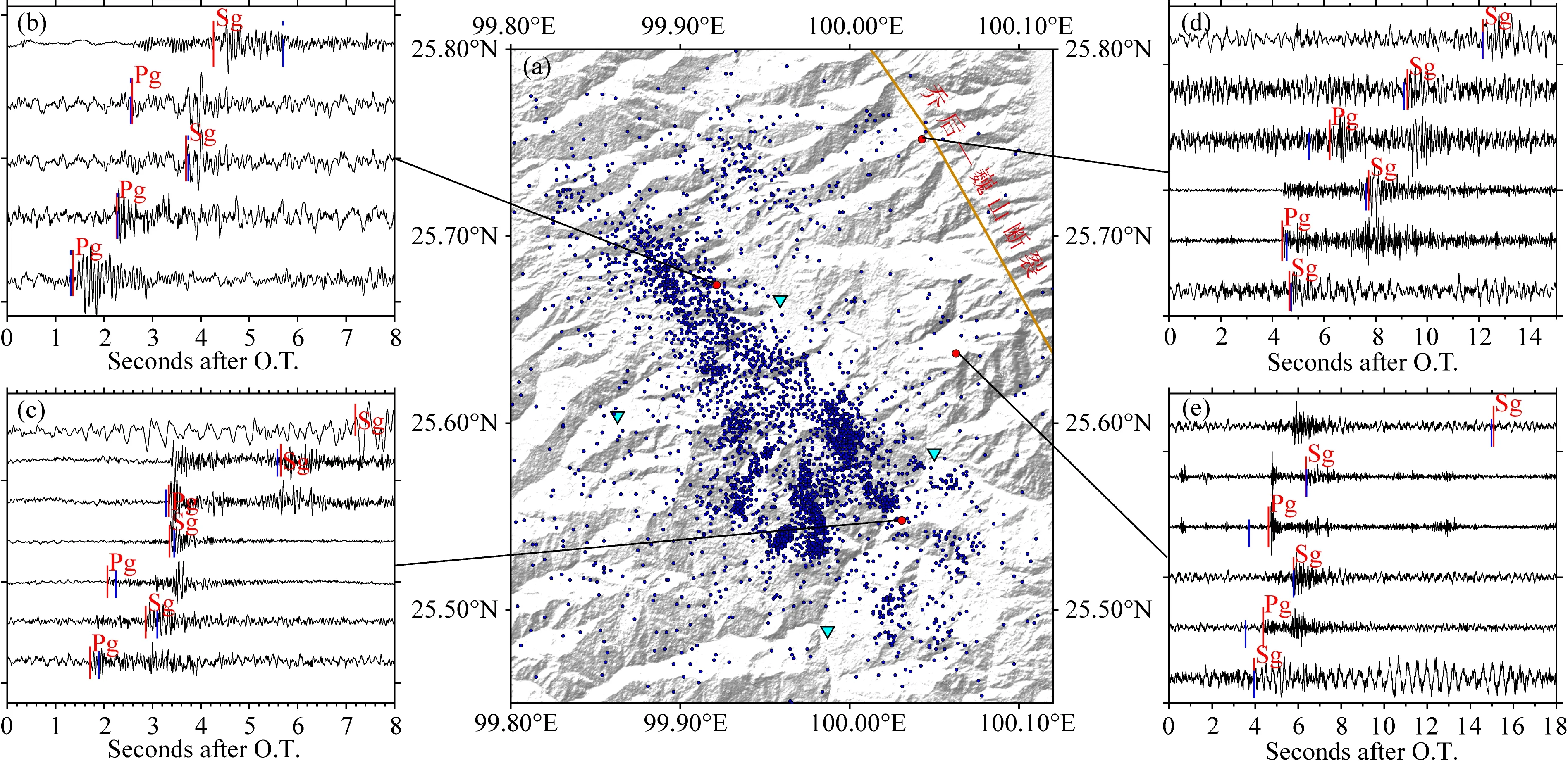
圖9 自動目錄多檢測出的事件震中分布圖和隨機抽取的4個事件波形記錄(b)—(e)中紅色實線為自動拾取到時位置,藍色虛線為理論到時位置.
為分析漏檢測117個事件的原因,我們采用離線方式對云南地震臺網的連續波形數據進行自動處理.事件定位成功震相數閾值設為最小值5個,放寬與人工目錄的匹配條件,即將震中位置偏差由10 km放寬至22 km(余震區長度).117個漏檢測事件中,有91個事件可以離線檢測到,其中29個因實時數據流中斷導致漏檢測,62個在降低震相數閾值和放寬匹配條件后可以檢測到.另有26個事件由于多震疊加和清晰震相數量較少等原因,導致離線處理也未能檢測到,圖10展示了其中6個典型漏檢測事件的波形圖.為進一步降低漏檢測率,需加強對多震疊加事件分離技術和單雙臺記錄地震檢測技術的研究,加強實時數據流狀態的監控,做到出現異常及時處置.
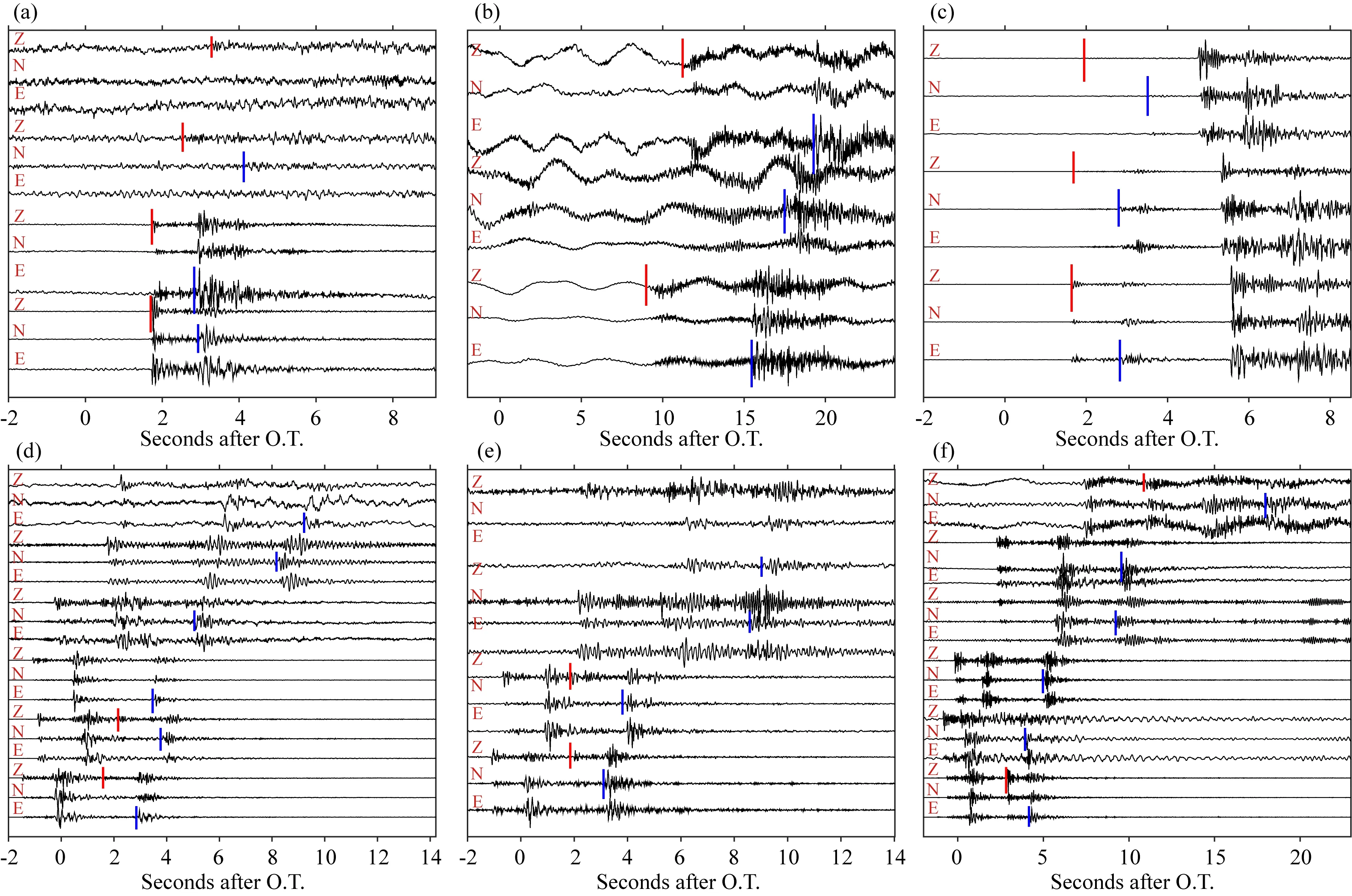
圖10 典型漏檢測事件的波形圖
目前實時處理系統采用PhaseNet方法檢測震相到時,盡管PhaseNet在不同地區展示出較好的泛化性能,但由于該模型訓練時沒有使用噪聲數據,因此當處理連續波形時,尤其是當地震波特征與北加州有明顯差異、臺站間距較大、異常干擾較多時,該算法檢測地震的能力會有明顯下降.為進一步提高地震檢出率和到時拾取精度,需要利用不同臺網的地震波形重新訓練模型,或者采用遷移學習技術提高模型性能(Zhu et al., 2019; Chai et al., 2020; 趙明等,2021).另外,目前用于檢測地震的深度神經網絡,如PhaseNet和EQTransformer主要使用了震中距150 km以內的地震波形數據進行訓練,盡管可以較好的檢測Pg、Sg震相,但當震中距較大,同時出現Pn、Pg、Sn、Sg等震相時,該方法無法同時拾取多種震相,容易導致震相類型判定錯誤,需結合高分辨率的三維速度模型,計算得到不同類型震相的理論走時,進一步提高震相類型的識別準確率.
對于震級較大,震中距較遠的臺站,除了記錄到初至Pn與Sn震相外,還會記錄到Pg、Sg、PmP、SmS等其他續至震相,這些續至震相有時會被錯誤關聯為一個新的事件,即產生“事件分裂”現象.對于距離較近,時間間隔較短的多個地震事件,可能會發生漏檢測與誤檢測.這些問題都需要通過進一步完善震相關聯算法來解決.在后續研究中,將進一步提升現有模塊的處理性能,繼續完成單臺記錄地震處理、事件類型判別、快速地震精定位和震源機制解等功能模塊的研發,全面提升實時處理系統的數據處理能力,豐富產出產品,為地震應急處置、地震預測預報等提供技術支撐和數據支持.
4 結論
本文介紹了一套基于人工智能的實時地震處理系統,該系統可實時處理連續地震波形數據,具備地震檢測、到時拾取、震相關聯、地震定位和震級測定功能,實現了實時、高靈敏度、高精度的地震目錄產出.以云南漾濞MS6.4地震序列為例,該系統可處理密集地震序列,在震后2~4 min內產出地震目錄,檢測出的地震數量是人工處理的2~3倍,定位精度與人工處理結果相當,震級測量誤差小,震級處理下限可達ML0.0級左右.
本文研究顯示,AI方法在地震實時處理中具有良好的應用前景.本系統不僅可應用于省級區域地震臺網,在水庫、礦山、火山等小型區域臺網中也具有較好的應用前景.該系統不僅可以實時處理在線數據,也可處理歷史上積累的離線數據.利用本系統對中國地震臺網積累的連續波形數據進行處理,可獲得完備性和一致性更高的地震目錄,可為深入認識地震活動背景、確定地震空區和地震危險段落提供重要參考.
后續將進一步提升該系統的處理性能,并集成單臺記錄地震處理、初動符號拾取、事件類型判別、地震精定位和震源機制解等模塊,將自動產出結果與我國現有的人工分析模式結合,實現地震事件的分級分類快速處理,優化我國地震編目的工作流程,提高地震目錄產出的時效性和一致性,提升我國地震數據的實時智能化處理水平.基于系統產出的實時地震目錄,可以快速計算b值變化,分析地震時空遷移特征,開展地震序列實時精定位,為地震應急救援、地震序列類型判定和地震預測預報等研究提供及時有效的數據支撐.
致謝本研究使用的數據由云南省地震局提供.感謝蘇有錦研究員、劉麗芳處長和鐘玉盛主任在實時處理系統安裝部署過程中給予的大力支持.在本文完成過程中,作者與陳緋雯高工進行了多次交流和討論,審稿專家的寶貴意見和建議使本文臻于完善,部分圖件使用GMT繪制(Wessel et al., 2019),在此一并表示感謝.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
